一种高分辨力雷达扩展目标模拟系统设计与实现
2023-09-18孔令峰张坤峰
罗 杰,孔令峰,张坤峰
(中国船舶集团有限公司第七二三研究所,江苏 扬州 225101)
在现代雷达系统中,高分辨雷达是一个重要的发展方向[1]。高分辨雷达的距离分辨单元小于目标尺寸,目标占据多个距离单元,可提供更多目标特征信息,称为扩展目标。近年来,随着合成孔径雷达(Synthetic Aperture Radar,SAR)等新体制高分辨力成像雷达在军事和科技领域的应用,扩展目标的概念进一步发展,由一维距离像目标延伸到二维面目标、三维体目标。在雷达系统研制过程中,雷达目标回波信号模拟器是不可缺少的设备[2]。因此,研制高分辨力雷达扩展目标模拟系统对于高分辨雷达研制、生产、调试、测试、试验以及检验具有重要意义。
本文针对现代高分辨力雷达扩展目标回波模拟提出了一种扩展目标模拟系统设计与实现方法,对高分辨力雷达扩展目标模拟系统的研制具有一定的参考价值和指导意义。
1 扩展目标模拟分析
对于高分辨力雷达而言,雷达的距离分辨单元小于目标尺寸,目标占据多个距离单元,其目标回波不能再被看作点目标,而是空间延展为由多个散射点组成的扩展目标。回波与发射信号不再具有相同的形式,目标后向电磁散射在时域上呈现较多尖锋和低谷[3]。常用的4种高距离分辨雷达体制为线性调频(Linear Frequency Modulation,LFM)连续波雷达[4]、线性调频脉冲压缩雷达[5]、步进频率雷达(Stepped Frequency Radar,SFR)[6]和线性调频兼步进频率的调频步进雷达[7]。高分辨力雷达信号的时域分辨能力取决于信号带宽,因此为提高距离向的分辨能力,高分辨雷达通常采用频率调制方法来增大信号宽带[8]。频率调制方法主要有线性调频、非线性调频和步进频率等,其中线性调频信号具有高信噪比、低副瓣的优点[9]。
SAR雷达是一种新体制高分辨力成像雷达,获得高质量和高分辨力图像是合成孔径雷达追求的目标[10]。SAR成像雷达是一种在距离向和方位向都具有高分辨力的成像雷达,其将合成孔径技术、脉冲压缩技术和数字信息处理技术这3种技术结合在一起,可使用较短的天线获得高距离向和方位向分辨率[11]。在距离向通过发射大带宽信号,采用脉冲压缩技术来获取高分辨力;在方位向通过同一雷达传感器在等间隔位置发射和接收脉冲信号,将接收的回波信号相干处理,依靠采用长时间信号获得高分辨力。在SAR成像雷达中使用最多LFM脉冲信号,LFM信号通过在脉冲持续时间内信号频率的连续性变化来获得较大的信号带宽[12]。
综上所述,为获得更多目标信息或高质量目标图像,常用的4种高距离分辨雷达、SAR成像雷达等高分辨力雷达相对于传统低分辨率雷达的共同特点是采用了大瞬时带宽信号,通常采用线性调频、非线性调频和步进频率等信号形式。对常用的4种高距离分辨雷达体制的目标回波模拟为一维距离像目标模拟,对SAR等高分辨力成像雷达的目标回波模拟为二维面目标和三维体目标目标模拟。因此,对高分辨力雷达扩展目标模拟系统的设计与实现而言,首先要建立一维距离像目标、二维面目标、三维体目标的目标回波模型,再获取目标雷达散射截面RCS特征数据,构建大时宽的目标回波模拟系统,实现一维距离像目标、二维面目标和三维体目标的射频回波信号模拟系统。
2 扩展目标回波模型
为实现高分辨力雷达扩展目标模拟系统,首先需要建立一维距离像目标、二维面目标和三维体目标的目标回波模型。
2.1 一维距离像目标回波模型
一维距离像目标为距离上扩展的多散射点目标,可以近似为每个独立散射体的冲激函数之和。
(1)
式中,ωi为第i个散射点的幅度加权值;h(ti)为每个散射点的冲激响应。
每个散射点的冲激响应h(ti)为
(2)

因此,在不考虑噪音时,一维距离目标回波模型可表示为如式(3)所示形式。
(3)
另外,文献[11]提出了一种高分辨力雷达一维距离像扩展目标模拟方法。基于回波信号的形成原理建立了回波信号数学仿真模型,给出了目标RCS调制因子的解算方法,并进行了仿真验证。
2.2 二维面目标回波模型
二维面目标是指目标的散射点坐标指含有x、y信息,设目标的基准点坐标为(x0,y0),目标的某个散射点P的坐标为(x,y),雷达的坐标为(Xr,Yr)。若目标在(x0-Xr,y0-Yr)方向的平动速度为V,与Y轴方向的夹角为θ,目标的转动速度为ω,则在ta时刻,某个散射点P与雷达的瞬时斜距为
(4)
因此,在ta时刻,对于某个散射点的回波信号,其数学模型为
(5)
式中,Kr为距离向调频率;tr为采样时间。
2.3 三维体目标回波模型
三维体目标是指目标散射点坐标含有z信息,设雷达的坐标为(xr,yr,zr),目标的基准点(初始时刻目标质心)在雷达坐标系下的位置为(x0,y0,z0),目标的某个散射点P在以基准点为原点的目标坐标系下的位置为(x,y,z),目标坐标位置关系如图1所示。
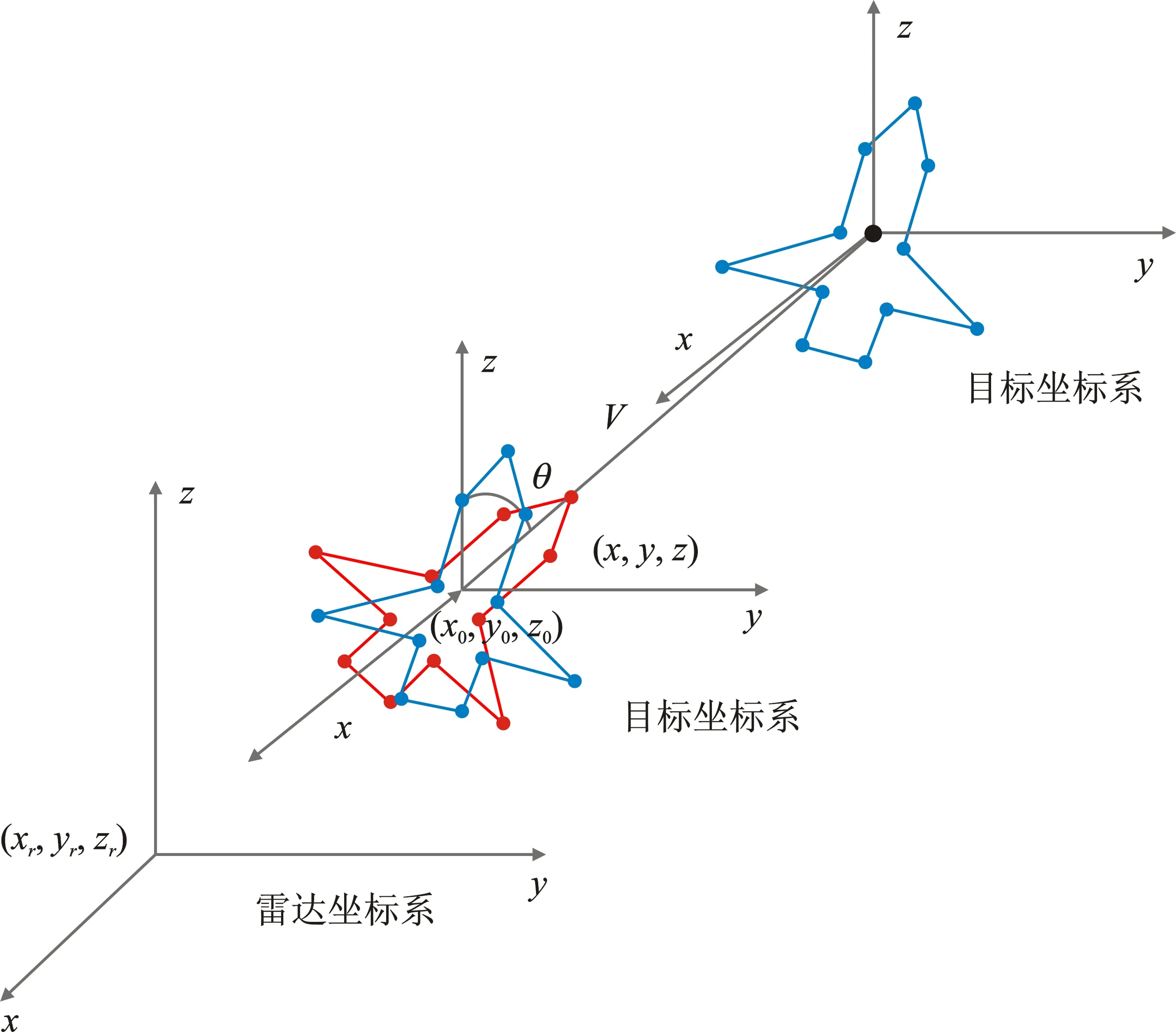
图1 目标坐标位置关系Figure 1. Target coordinate position relationship
若目标在(x0-xr,y0-yr,z0-zr)方向的平动速度为V,与Z轴方向的夹角为θ,与X轴方向的夹角为φ,目标ta时刻的姿态为(α1,α2,α3),姿态角分别为横滚、俯仰和偏航,则在ta时刻,由姿态变化所引起的位置变化为
(6)
在ta时刻,某个散射点P与雷达的瞬时斜距为
(7)
因此,在ta时刻,对于某个散射点的回波信号,其数学模型为
(8)
式中,Kr为距离向调频率;tr为采样时间。
3 系统设计与实现
3.1 系统组成
高分辨力雷达扩展目标模拟系统主要由目标RCS特征数据仿真计算服务器、场景规划及综合操控显示计算机、宽带射频接收机单元、基带回波信号产生单元、宽带射频通道单元、宽带捷变频率合成器单元和千兆以太网集线器、反射内存网集线器等组成,其系统组成如图2所示。
其中,目标RCS特征数据仿真计算服务器为一台高性能服务器,安装有复杂目标RCS电磁特性计算仿真软件,目的是通过仿真计算获取高分辨力雷达扩展目标回波模拟所需的目标的RCS特征数据。
场景规划及综合操控显示计算机是整个模拟系统的操控显示中心,承担系统的系统控制与操控管理、资源调度与分配、模拟场景规划与设置、战情解算与分配、场景态势显示、系统运行状态显示。
宽带射频接收机单元主要是接收高分辨力雷达的射频发射信号,对接收到的雷达射频信号[13]进行电平调整、脉冲参数测量以及下变频等处理,实现平稳接收和参数获取[14]。基带回波信号产生单元主要是接收宽带射频接收机单元输出的雷达中频基带信号,对雷达中频基带信号进行高速采样、存储、延迟、多普勒调制、RCS调制和恢复,生成高分辨力雷达扩展目标回波基带信号。宽带射频通道单元对基带回波信号产生单元生成的扩展目标回波基带信号进行上变频和幅度调制,产生高分辨力雷达扩展目标回波射频信号。宽带捷变频率合成器单元为宽带射频接收机单元和宽带射频通道单元提供中上、下变频所需的本振信号。千兆以太网集线器和反射内存网集线器为系统构建数据传输所需的以太网和实时网系统。
3.2 运行原理
高分辨力雷达扩展目标模拟系统工作原理如图3所示。
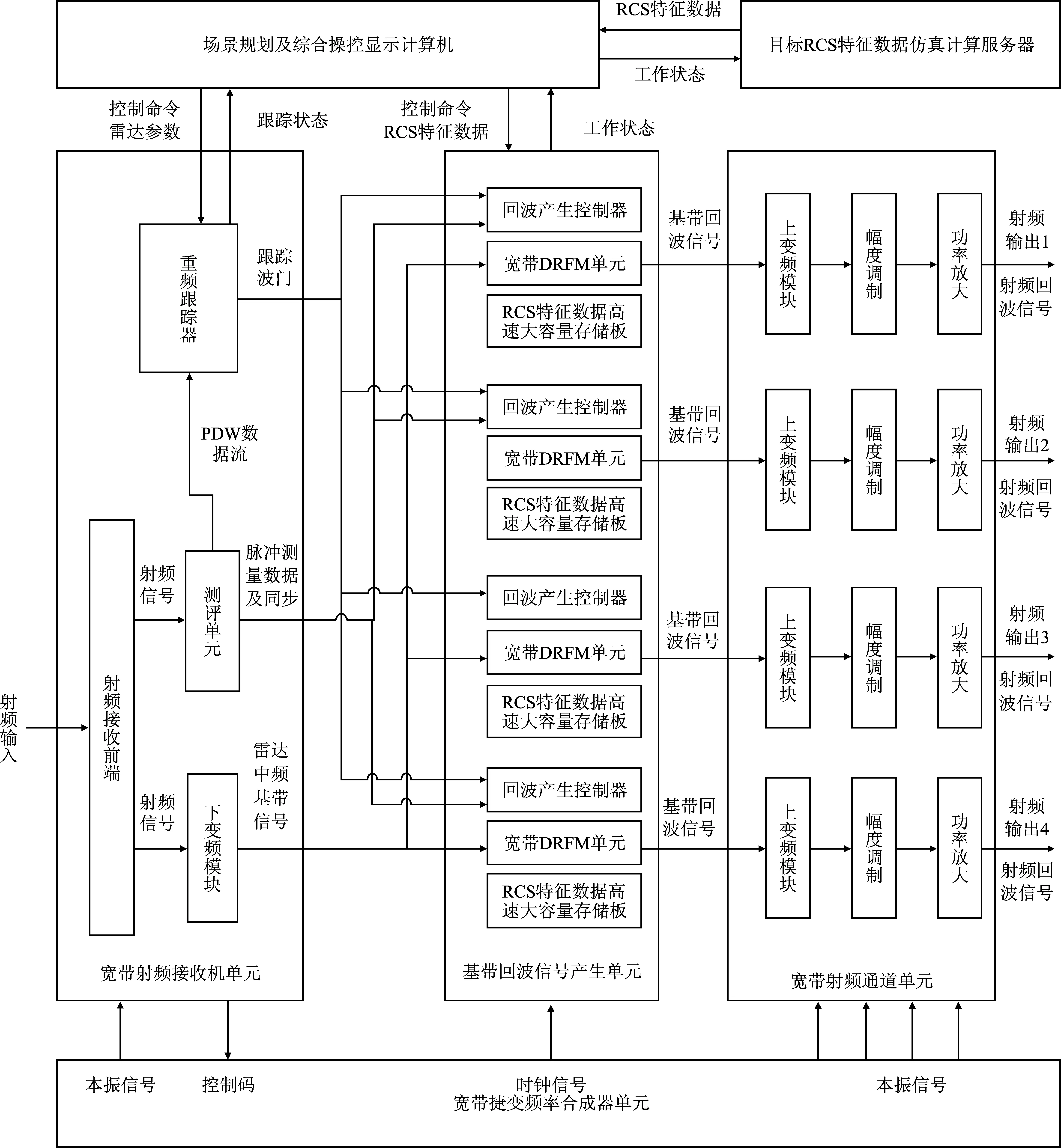
图3 系统工作原理Figure 3. System operation principle
在系统运行前,通过在目标RCS特征数据仿真计算服务器上安装复杂目标RCS电磁特性计算仿真软件。对建立的目标模型进行电磁仿真,通过仿真计算获取高分辨力雷达扩展目标回波模拟所需的目标的RCS特征数据,将目标的RCS特征数据下发给场景规划及综合操控显示计算机。操作员通过场景规划及综合操控显示计算机对试验场景进行规划,对场景参数、雷达参数和目标参数进行设置,生成初始战情数据。在系统初始化阶段,场景规划及综合操控显示计算机对各分系统进行软硬件配置和初始化,并将雷达参数、目标参数和目标RCS特征数据等发送给各分系统。
在系统运行阶段,场景规划及综合操控显示计算机根据仿真周期计算目标的运动航迹和姿态数据实时下发给基带回波信号产生单元。宽带射频接收机单元接收高分辨力雷达的射频发射信号,对接收到的雷达射频信号进行电平调整、脉冲参数测量以及下变频等处理,实现平稳接收和参数获取,并将脉冲参数测量发送给重频跟踪器和4套基带回波信号产生单元。重频跟踪器接收来自参数测量单元的脉冲描述字(Pulse Descriptor Word,PDW)数据流,进行跟踪滤波,实现对雷达信号的快速、准确跟踪,对跟踪波门进行综合,实时、稳定地输出与被试雷达信号相对应的各种跟踪波门和信号批号、目标跟踪状态等信息,发送给基带回波信号产生单元,同时将目标跟踪状态发送给场景规划及综合操控显示计算机。下变频模块将雷达射频信号变频至基带回波信号产生单元所需的中频信号,并功分放大4路,分别发送给4套基带回波信号产生单元。基带回波信号产生单元采用宽带射频储频(Digital Radio Frequency Memory,DRFM)技术,接收宽带射频接收机单元输出的雷达中频基带信号,对雷达中频基带信号进行高速采样、存储、延迟、多普勒调制、RCS调制和恢复,生成高分辨力雷达扩展目标回波基带信号。宽带射频通道单元对基带回波信号产生单元生成的扩展目标回波基带信号进行上变频和幅度调制,产生高分辨力雷达扩展目标回波射频信号。宽带捷变频率合成器单元为宽带射频接收机单元和宽带射频通道单元提供中上、下变频所需的本振信号。
3.3 关键技术与实现
高分辨力雷达扩展目标模拟系统的设计与实现过程中主要涉及宽带射频接收机[15]、大瞬时带宽基带回波信号产生、目标RCS数据获取与调制以及宽带捷变频率合成器等关键技术,直接决定系统功能和性能的实现,对系统性能至关重要。
3.3.1 宽带射频接收机技术
系统的宽带射频接收机单元采用单比特数字接收体制的宽带射频接收技术,以解决工作带宽、瞬时带宽、接收灵敏度、测频精度的匹配协调工作,如图4所示。
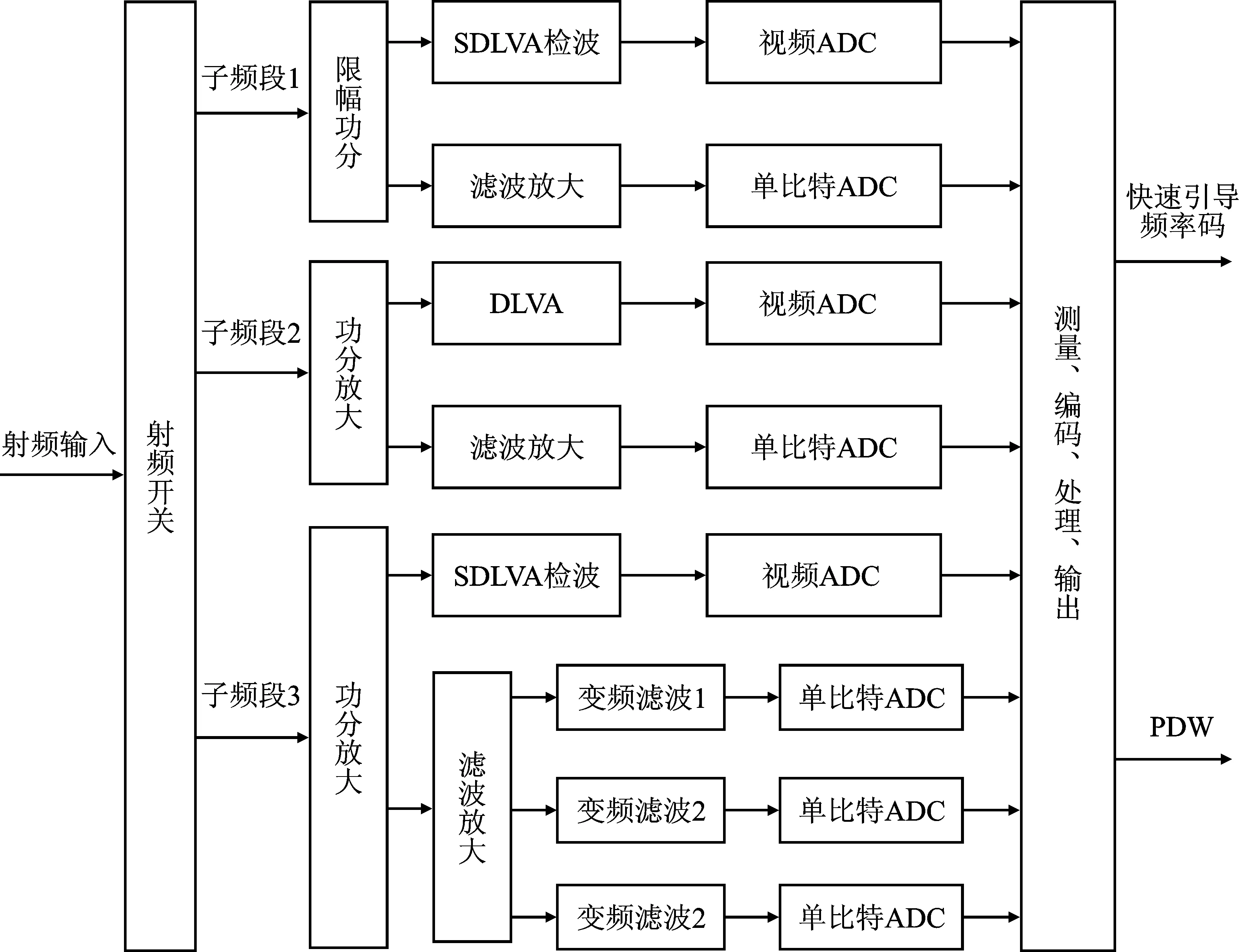
图4 宽带射频接收机技术原理Figure 4. Broadband RF receiver technology principle
3.3.2 大瞬时带宽基带回波信号产生技术
系统的基带回波信号产生单元采用大瞬时带宽基带回波信号产生技术,主要包括宽带数字储频技术和高速大容量数据存储交换技术,用于解决瞬时带宽大、二维面目标和三维体目标RCS特征数据体量大、数据调制速率高以及实时性要求高等需求问题,如图5所示。其中,DRFM采用了超高速的A/D、D/A变换器、高速大容量现场可编程逻辑控制器件FPGA(Field-Programmable Gate Array)[16-17]、双口SDRAM(Synchronous Dynamic Random-Access Memory)等高速器件,可达到瞬时带宽为1 000 MHz、延迟精度为5 ns、多普勒精度为1 Hz、存储深度为4 ms的技术指标。
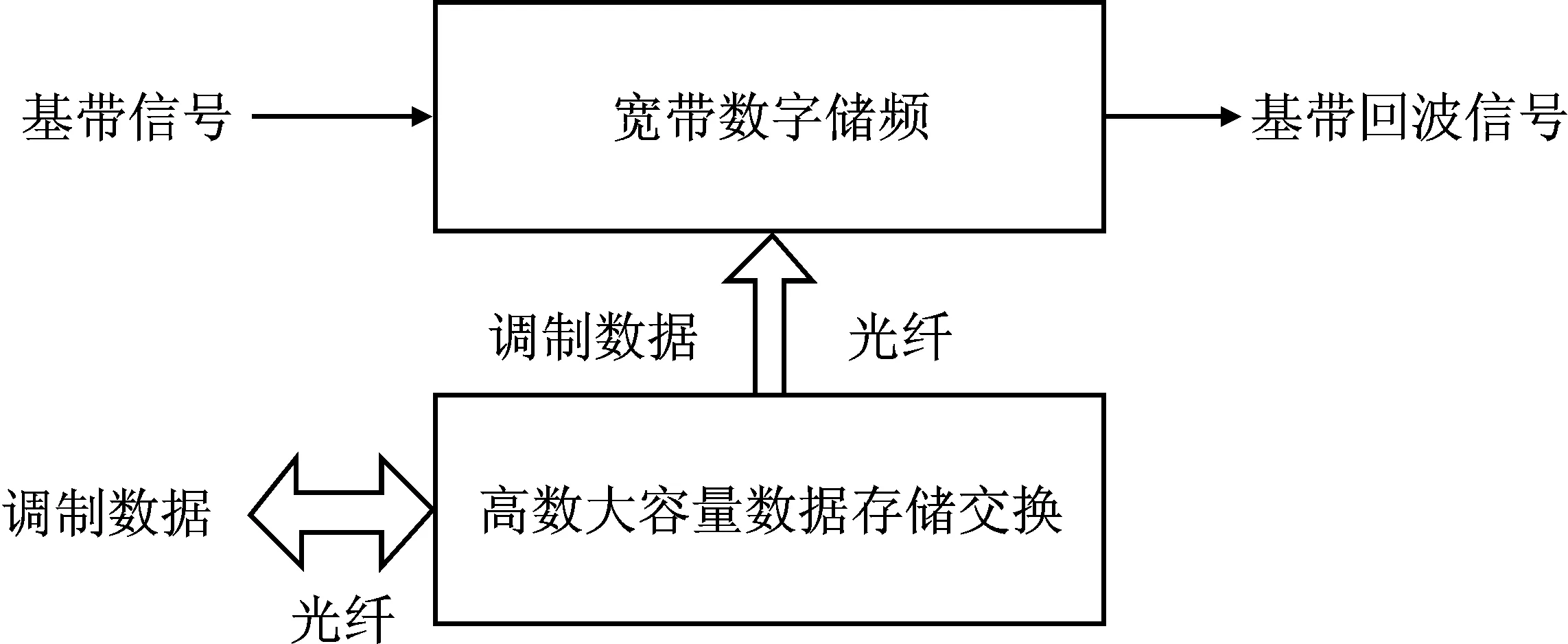
图5 大瞬时带宽基带回波信号产生技术原理Figure 5. Principle of technology for generating large instantaneous bandwidth baseband echo signals
高速大容量数据存储交换板由一套多片固态闪存芯片阵列组成,实时数据存储速度高,能够存储总量1 TB的数据。板载FPGA作为固态闪存阵列的控制器,其数据交互通过4个12芯的光纤接口进行,光纤接口的最高设计速度为6.25 Gbit·s-1,以满足系统调制数据的实时交换需要。
3.3.3 目标RCS数据获取与调制技术
高分辨力雷达扩展目标模拟系统可实现一维距离像目标、二维面目标和三维体目标的模拟。但无论是一维距离像目标、二维面目标还是三维体目标的RCS特征数据都需进行大量的仿真计算,RCS数据量也较大,在基带信号上调制的RCS数据需要较高的数据传输率。目标RCS数据获取与调制技术用于解决目标回波RCS数据仿真计算和高速调制问题。为了获取目标的RCS特征数据,系统的目标RCS特征数据仿真计算服务器采用RadBase、XPATCH、FEKO、GRECO-CMT、NURBS、NESC等典型的复杂目标RCS计算仿真软件进行仿真计算。首先建立目标的基础模型,再进一步完成高精度目标的三维几何模型,然后引入复杂目标RCS计算仿真软件,按照频率步、角度步进行全频段范围、各姿态角度模拟仿真,对目标电磁散射特性进行分析、预估与仿真,反复迭代修正,从而获得一维距离像目标、二维面目标、三维体目标的RCS特征数据。目标RCS调制因子的解算过程实质为目标RCS的电压量与雷达发射采样信号的线性卷积过程[18],因此可以用时域卷积法进行解算[19]。为了在基带信号上实时、高速、准确地调制获得的目标RCS特征数据,一方面需要宽带数字储频和高速大容量数据存储交换板,另一方面需要优化快速调制方法,主要是采用在数字域进行时延数据和目标RCS特性数据的卷积调制,如图6所示。
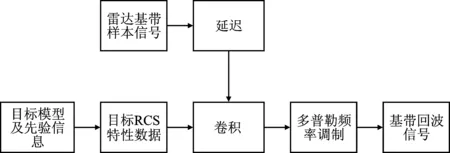
图6 目标RCS特性数据调制技术原理Figure 6. Principle of target RCS characteristic data modulation technology
3.3.4 宽带捷变频率合成器技术
宽带捷变频率合成器[20]单元的主要功能是为高分辨力雷达扩展目标模拟系统的宽带射频接收机单元和宽带射频通道单元提供中上、下变频所需的本振信号。为实现系统所需的宽频带、精细步进、快速引导的宽带捷变频率合成器,采用了宽带捷变频率合成器技术。该技术采用大频率步进的直接式频率合成器产生的标频信号和可进行频率精细控制的数字直接频率合成器DDS(Direct Digital Synthesizer)产生的信号进行上变频合成,从而生成可连续快速调整频率的标频信号。
宽带捷变频率合成器技术由精频率步跳FFS1产生的精细频率信号与粗频率步跳FFS2产生的粗频率信号混频滤波后,再同粗频率步跳FFS3和FFS4产生的频率信号进行混频,通过开关滤波器组滤波和放大器放大后输出所需的宽频带、精细步进的低相噪本振信号。为保证变频输出信号的相参性,各标频及DDS均是一个以100 MHz低相噪晶体振荡器的频率为基准而产生的连续波信号。宽带捷变频率合成器技术原理如图7所示。
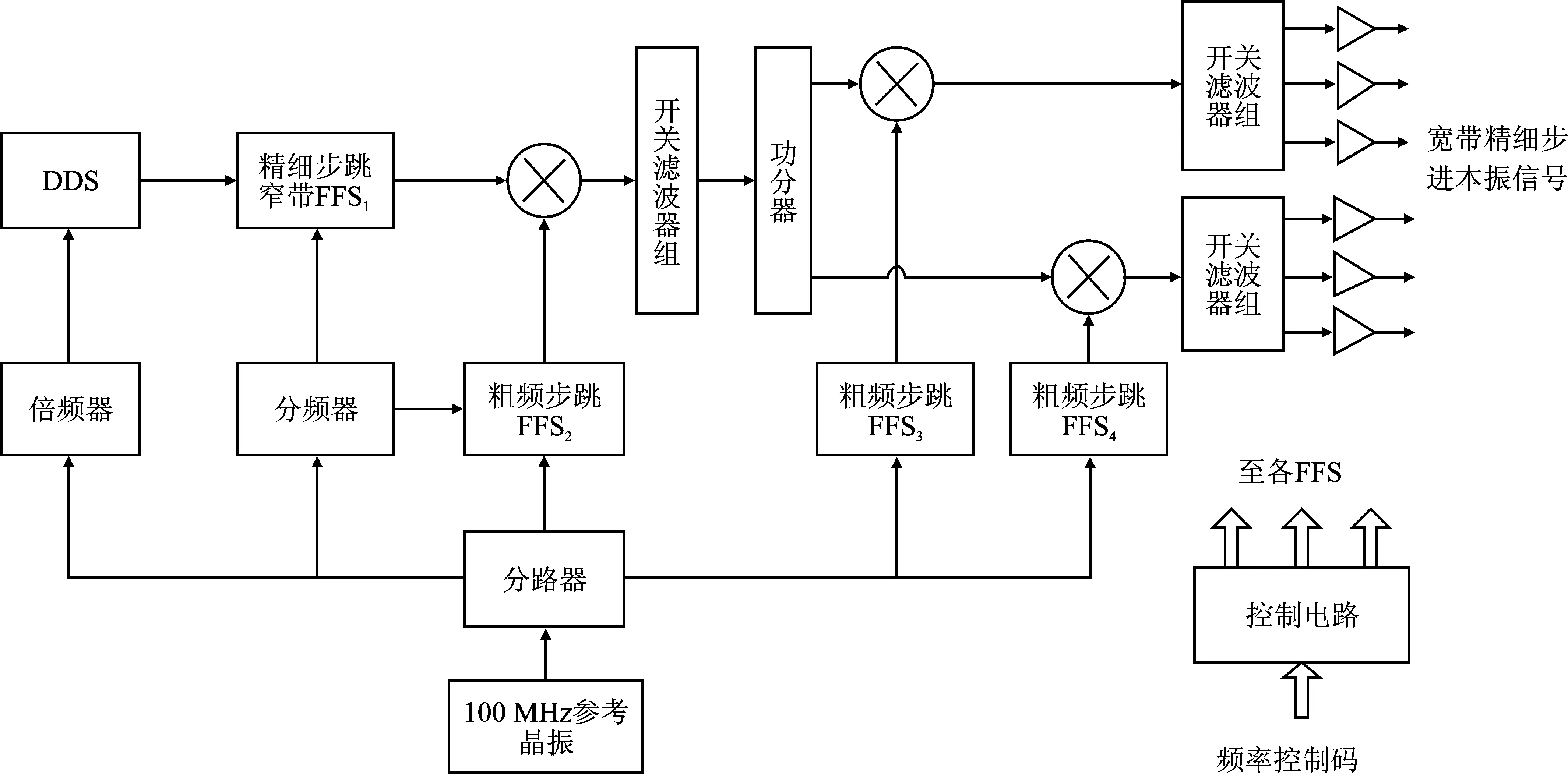
图7 宽带捷变频率合成器技术原理Figure 7. Principle of broadband agile frequency synthesizer technology
4 试验验证
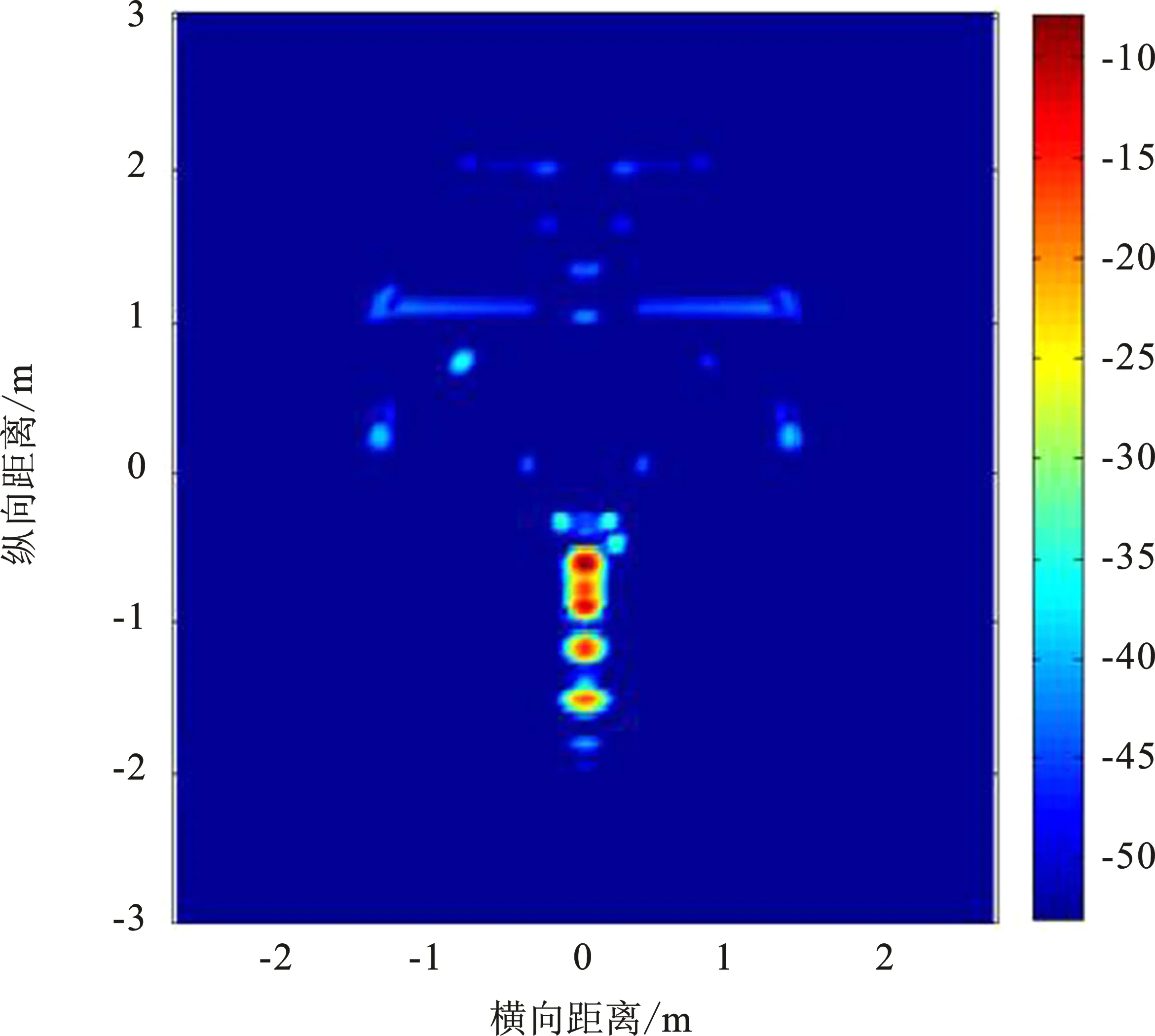
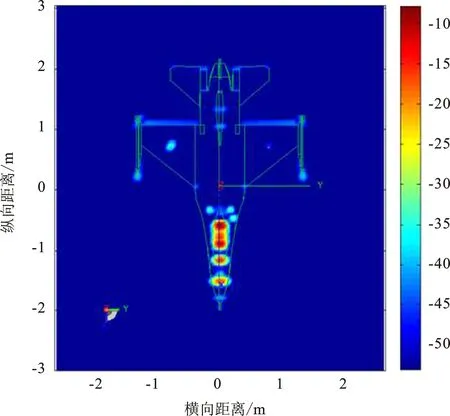
为了验证高分辨力雷达扩展目标模拟系统的实现效果,首先建立某典型战斗机目标的二维几何模型,利用RadBase仿真软件获得该典型战斗机目标的RCS特征数据,再利用RadBase仿真软件进行二维成像仿真,最后利用高分辨力雷达扩展目标模拟系统进行射频仿真和二维成像处理。RadBase仿真结果和射频仿真二维成像处理结果对比如图8所示,其中图8(a)为RadBase仿真结果,图8(b)为射频仿真二维成像处理结果。
(a)
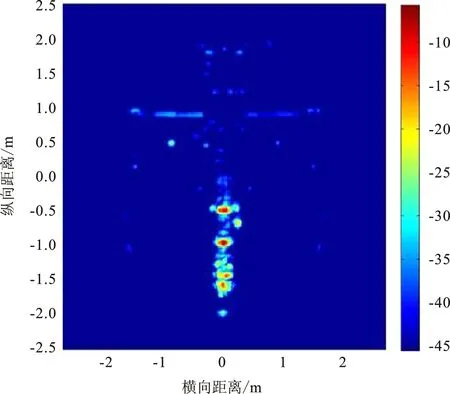
(b)图8 RadBase仿真结果和射频仿真二维成像处理结果对比(0°)(a)RadarBase二维成像结果 (b)射频仿真二维成像处理结果Figure 8. Comparison of RadBase simulation result and RF simulation 2D imaging processing result(0°)(a)RadBase 2D imaging processing result (b)RF simulation 2D imaging processing result
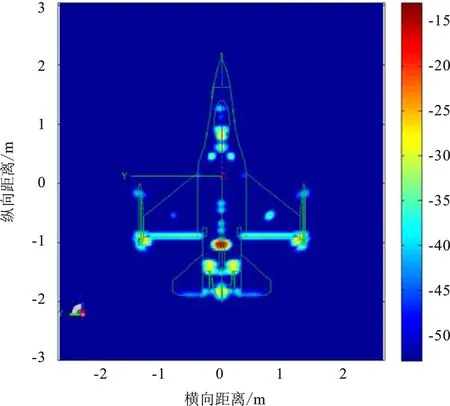
为了将图像散射点能和典型飞机目标部位对应,便于RadBase仿真结果和射频仿真二维成像处理结果分析对比,在RadBase仿真结果和射频仿真二维成像处理结果图上叠加典型飞机目标轮廓线后的对比图如图9~图11所示。
(a)
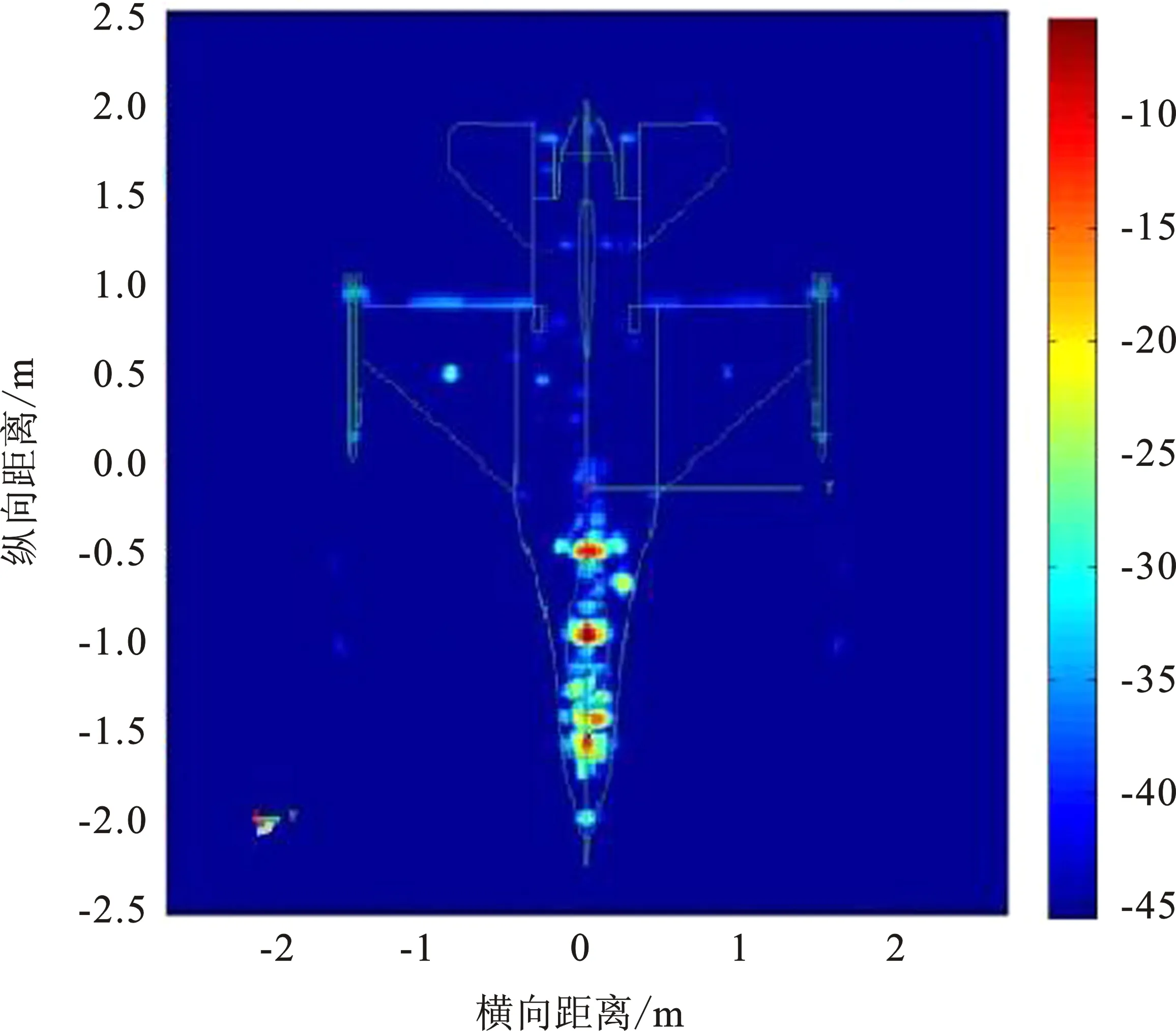
(b)图9 叠加典型飞机目标轮廓线后的RadBase仿真结果和射频仿真二维成像处理结果对比(0°)(a)RadarBase二维成像结果 (b)射频仿真二维成像处理结果Figure 9. Comparison of RadBase simulation result and RF simulation 2D imaging processing result after superimposing typical aircraf target contours(0°)(a)RadBase 2D imaging processing result (b)RF simulation 2D imaging processing result
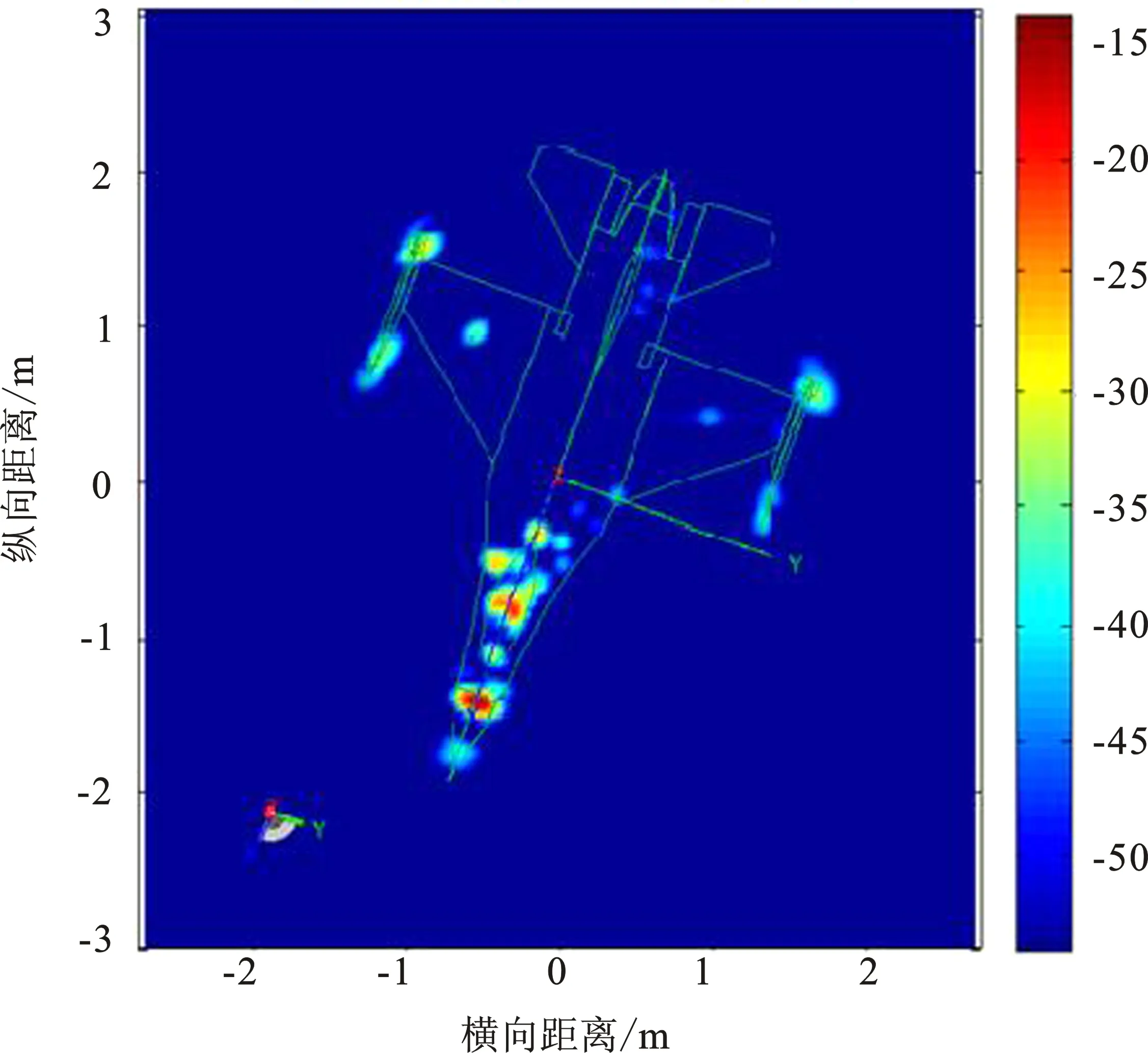
(a)
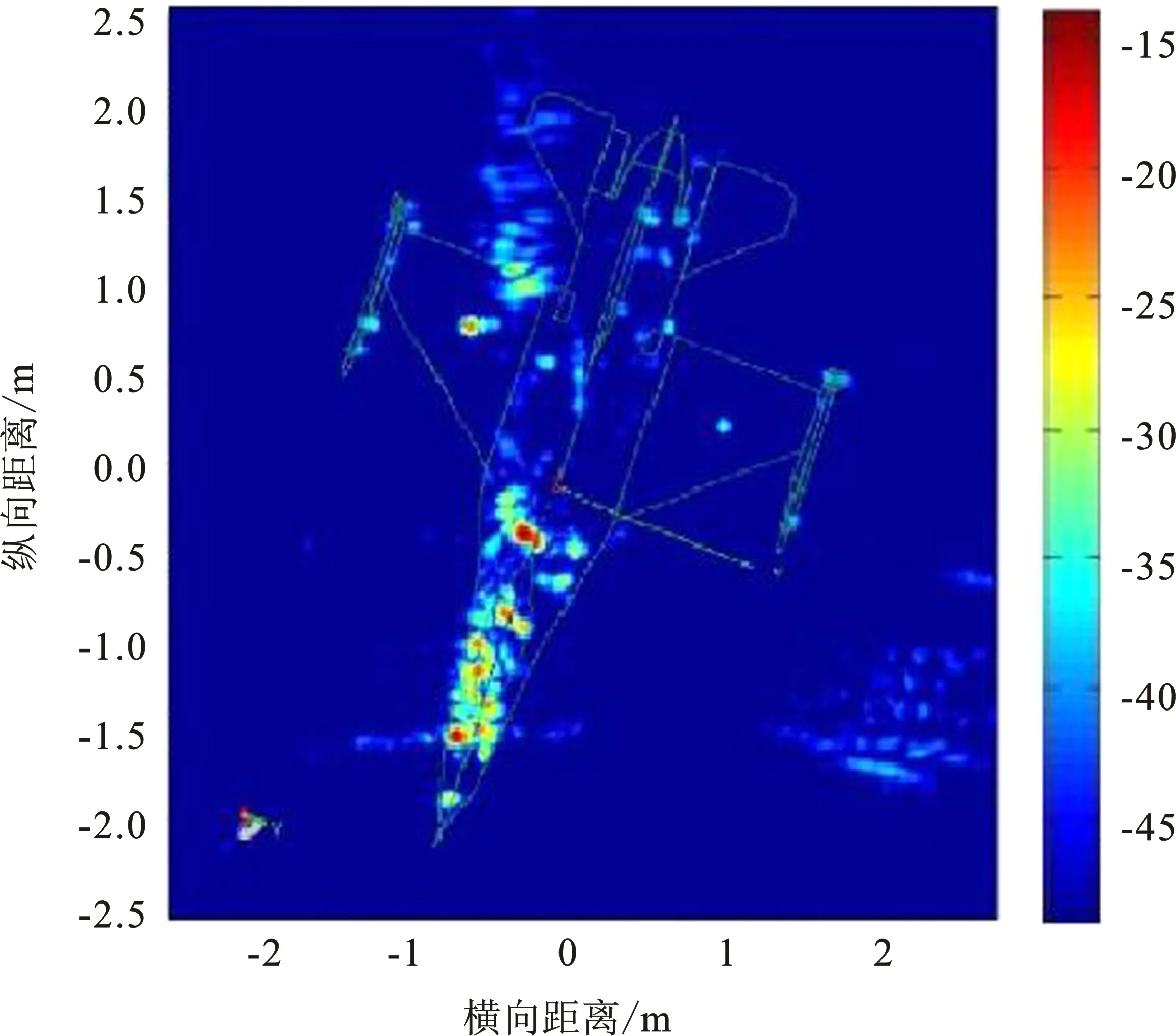
(b)图10 叠加典型飞机目标轮廓线后的RadBase仿真结果和射频仿真二维成像处理结果对比(20°)(a)RadarBase二维成像结果 (b)射频仿真二维成像处理结果Figure 10. Comparison of RadBase simulation result and RF simulation 2D imaging processing result after superimposing typical aircraf target contours(20°)(a)RadBase 2D imaging processing result (b)RF simulation 2D imaging processing result
(a)
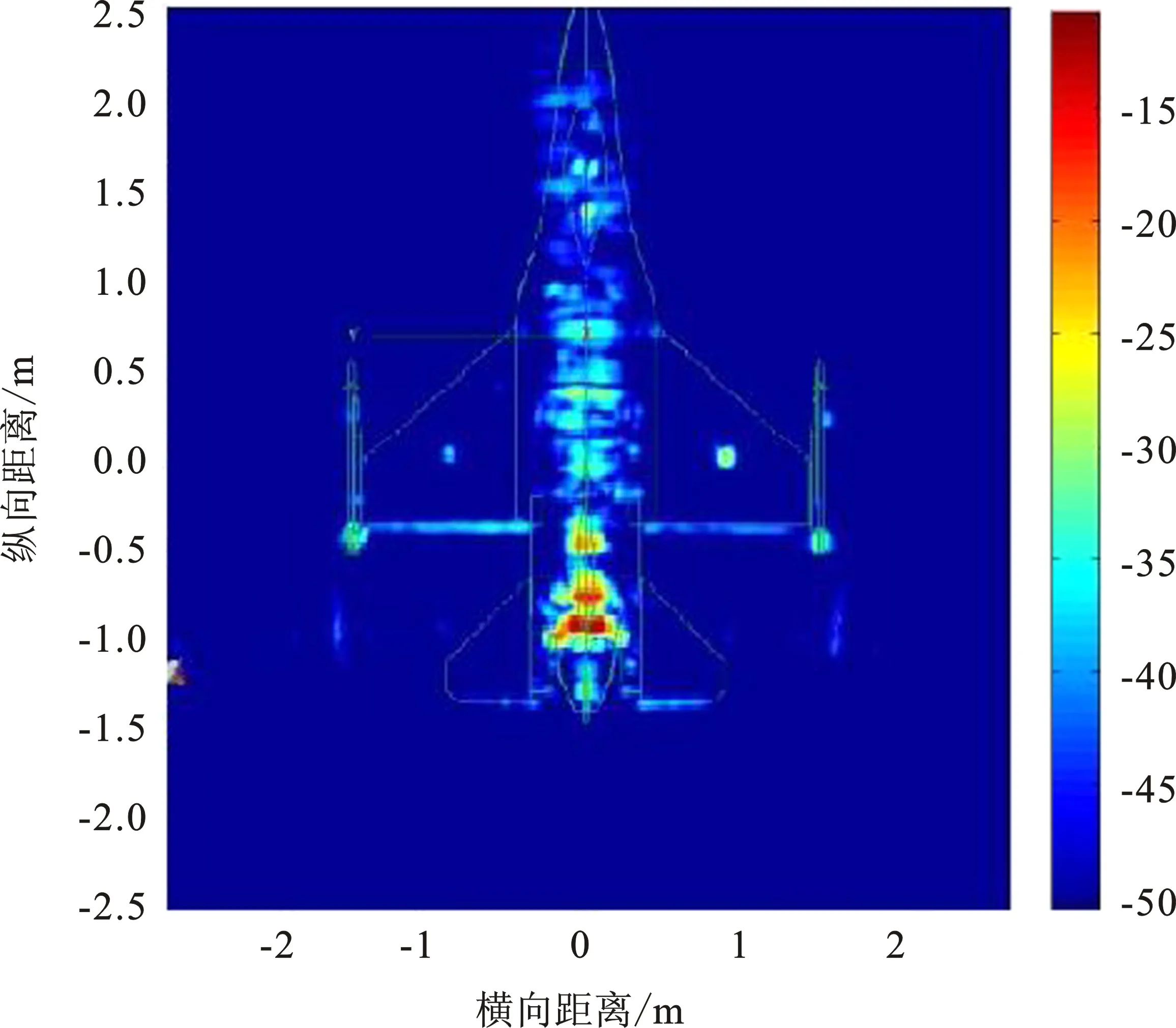
(b)图11 叠加典型飞机目标轮廓线后的RadBase仿真结果和射频仿真二维成像处理结果对比(180°)(a)RadarBase二维成像结果 (b)射频仿真二维成像处理结果Figure 11. Comparison of RadBase simulation result and RF simulation 2D imaging processing result after superimposing typical aircraf target contours(180°)(a)RadBase 2D imaging processing result (b)RF simulation 2D imaging processing result
5 结束语
通过RadBase仿真结果和射频仿真二维成像处理结果的对比可知,利用所述高分辨力雷达扩展目标模拟系统进行某典型战斗机目标的模拟结果与利用RadBase仿真软件进行某典型战斗机目标的仿真结果一致,证明了高分辨力雷达扩展目标模拟系统的有效性,可较为真实地模拟高距离分辨率雷达的回波信号,满足高距离分辨率雷达的研制、生产、调试、测试、试验以及检验需求,对高分辨力雷达扩展目标模拟系统的研制具有较好的指导意义和参考价值。