基于高分辨率遥感影像的船舶航标漂移监测方法
2023-09-16王晓晴
王晓晴
(交通运输部北海航海保障中心天津航标处,天津 300456)
0 引 言
航标是指引船舶航行的主要标志[1]。船员需要按照航标确定船舶的航行方向,其是否存在漂移情况,直接影响船舶航行的安全性[2]。传统的GPS 船舶航标漂移监测方法,易受电离层延时误差影响,导致其定位精度较低,出现航标漂移误报警的概率较高,无法为船舶安全航行提供保障。为此,需要研究精度更好的船舶航标漂移监测方法。例如,周春辉等[3]利用拉依达数学准则预处理航标数据,通过Kmeans 算法,聚类航标数据,以聚类中心为航标漂移量计算的基准点,通过Person 相关性分析法,结合基准点,建立航标漂移监测模型,得到航标漂移监测结果。该方法可有效监测航标漂移情况,利于加快航标管理效率。倪汉杰等[4]利用FasterRCNN 模型特征提取网络,在航标图像内提取航标特征,通过锚框机制与检测框抑制算法,处理航标特征,得到航标漂移监测结果。该方法具备较快的航标漂移监测效率。但以上方法的航标漂移监测范围均较小,无法获取大面积的航标漂移监测结果。高分辨率遥感影像涵盖了大范围的海域信息,可提升航标漂移的监测范围。为此,研究基于高分辨率遥感影像的船舶航标漂移监测方法,精准监测航标漂移情况,为航标航道的数字化建设提供数据支持。
1 船舶航标漂移监测方法
1.1 船舶航标高分辨率遥感影像的特征匹配
利用尺度不变特征变换(Scale Invariant Feature Transform,SIFT),在船舶航标高分辨率遥感影像内,提取船舶航标位置信息特征,描绘2 幅高分辨率遥感影像内,同一船舶航标像素点位置信息的特征匹配点,实现船舶航标高分辨率遥感影像的特征匹配,具体步骤如下:

1.2 高分辨率遥感影像的船舶航标目标区域提取
对于高分辨率遥感影像来说,船舶航标较小,直接进行船舶航标聚类,会出现错误聚类情况[8]。为此,需要利用相关系数编组的目标提取算法,提取船舶航标目标区域。
求解候选目标间的相关系数,并按照相关系数对全部航标展开编组,得到船舶航标目标区域。
令 待计算船舶 航 标是 φ1与 φ2,对航标 φ1与 φ2分 别设 置 窗口为h、b,对应 的 窗 口大小 为h=N1×N1、b=N2×N2;其中,N2>N1, 求解b内 全部N1×N1的窗口,以及h在各波段的相关系数,在b内 包含和h各波段相 关 系数 均 符合 阈 值 的窗 口 情况 下,判定 φ1对 φ2相似。同 理,计 算 φ2对 φ1的 相 似性,如 果 φ1对 φ2相 似,同时 φ2对φ1相 似,则φ1和 φ2相似。
船舶航标目标区域提取的具体步骤如下:
步骤1 遍历候选船舶航标目标,按照相关系数计算原理,计算候选目标间的相关系数,按照相关系数去掉不具备相关性的目标,获取疑似船舶航标目标区域,记作相关组。
步骤2 全部船舶航标完成遍历后,输出相关组。
步骤3 以最大相关组为船舶航标组,即船舶航标目标区域提取结果。计算公式为:
式中:Q(φ1,φ2)为高分辨率遥感影像的船舶航标目标区域; τ为区域相关系数。
1.3 船舶航标目标聚类
船舶航标目标聚类的具体步骤如下:
步骤1 设定船舶航标目标区域划分网格数量。
步骤2 划分船舶航标目标区域的单元,同时求解各单元的密度。
步骤6 合并连通全部子类,得到最终的船舶航标目标区域内的航标的聚类结果,获取高分辨率遥感影像内的航标数量,并对其进行编号,确定像素数与中心点坐标。
1.4 航标偏移监测的实现
船舶航标漂移监测的具体步骤如下:
步骤1 通过SIFT 算法在高分辨率遥感影像内,提取航标位置信息特征点,并依据欧式距离展开特征匹配,获取用于描述2 幅高分辨率遥感影像内同一航标像素点位置信息的特征匹配点。
步骤2 利用相关系数编组的目标提取算法,在高分辨率遥感影像内,提取船舶航标目标区域。
步骤3 通过扩展凝聚点和网格的聚类算法,对船舶航标目标区域内的航标进行聚类,获取高分辨率遥感影像内航标的编号、像素数与中心点坐标。
步骤4 结合步骤1 与步骤3 的结果,将SIFT 算法获取的特征匹配点横纵坐标,分别除以聚类算法设置的网格数量,得到新的像素点坐标,分析这些坐标是否在步骤3 获取的像素点坐标范围中,若在该范围中,则2 幅高分辨率遥感影像内航标匹配成功,标记为同样颜色。
将式(11)映射至频域后,对互功率谱进行傅里叶反变换,比较不同时间点的位置信息,可以得到航标的漂移量,实现对船舶航标漂移的监测。
2 实验分析
以某港口的高分辨率遥感影像数据集为实验对象,该数据集是由0.6 m 全色影像与2.4 m 多波段影像组成,遥感影像大小均是3000×3 000 pixel。利用本文方法对该港口的船舶航标进行漂移监测,为提升船舶航向安全提供帮助。
在该高分辨率遥感影像数据集内,随机选择同一区域不同时刻的2 幅高分辨率遥感影像。该区域内共包含6 个船舶航标。
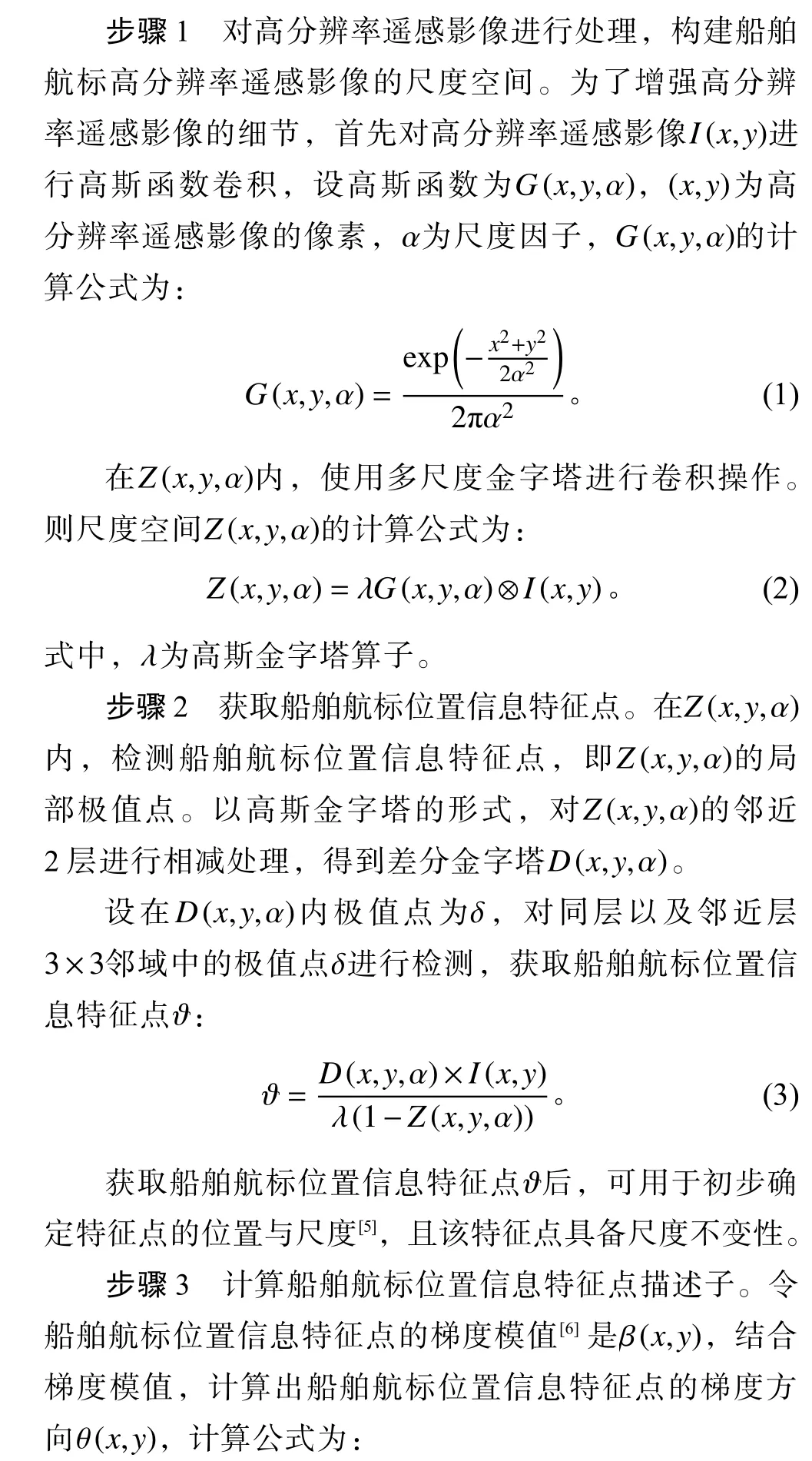
利用本文方法在图1 的2 幅高分辨率遥影像内,提取船舶航标位置信息特征点,提取结果如图1 所示。
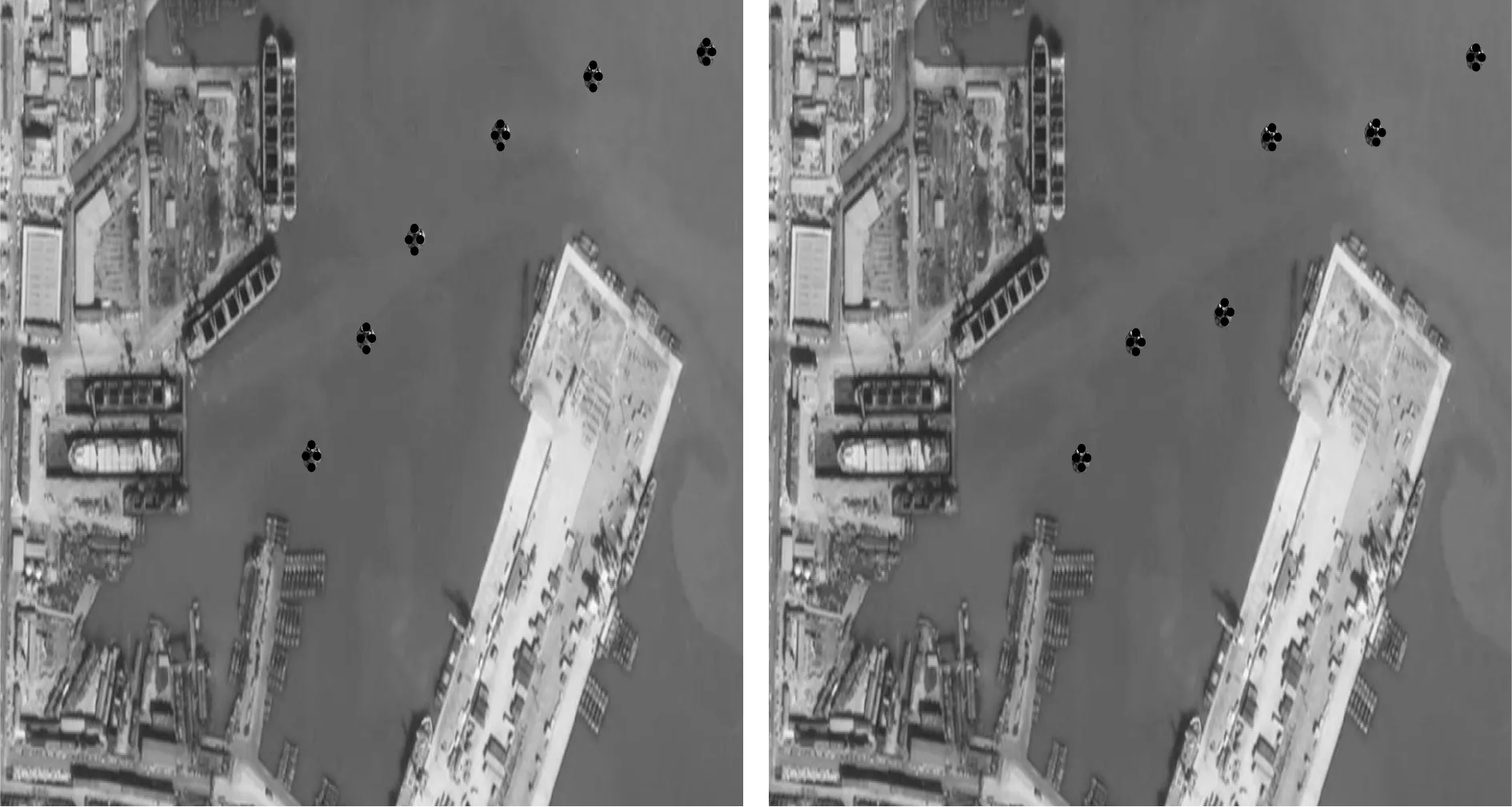
图1 船舶航标位置信息特征点提取结果Fig.1 Extraction results of feature points of ship beacon location information
根据可知,本文方法可有效在高分辨率遥感影像内,提取船舶航标位置信息特征点,为后续船舶航标漂移监测提供数据支持。
利用本文方法在高分辨率遥感影像内,提取船舶航标目标区域,提取结果如图2 所示。
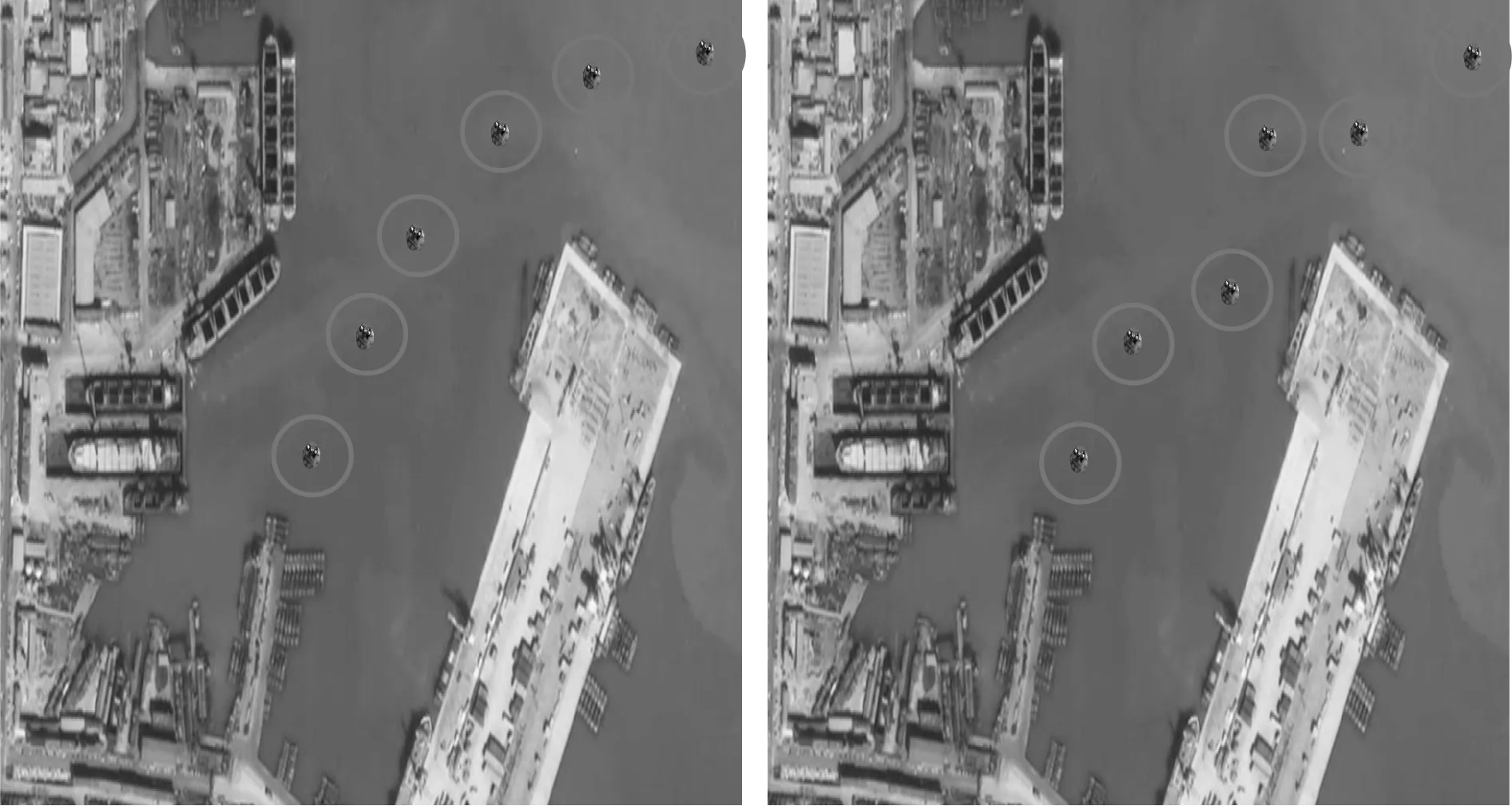
图2 船舶航标目标区域提取结果Fig.2 Extraction results of target area of ship beacon
可知,本文方法可有效在高分辨率遥感影像内,提取船舶航标目标区域,每幅高分辨率遥感影像内,均各提取6 个船舶航标目标区域,与实际航标数量一致,说明本文方法船舶航标目标区域提取精度较高。
利用本文方法对同一航标进行匹配,并以相同颜色标记同一个航标,航标匹配结果如图3 所示。
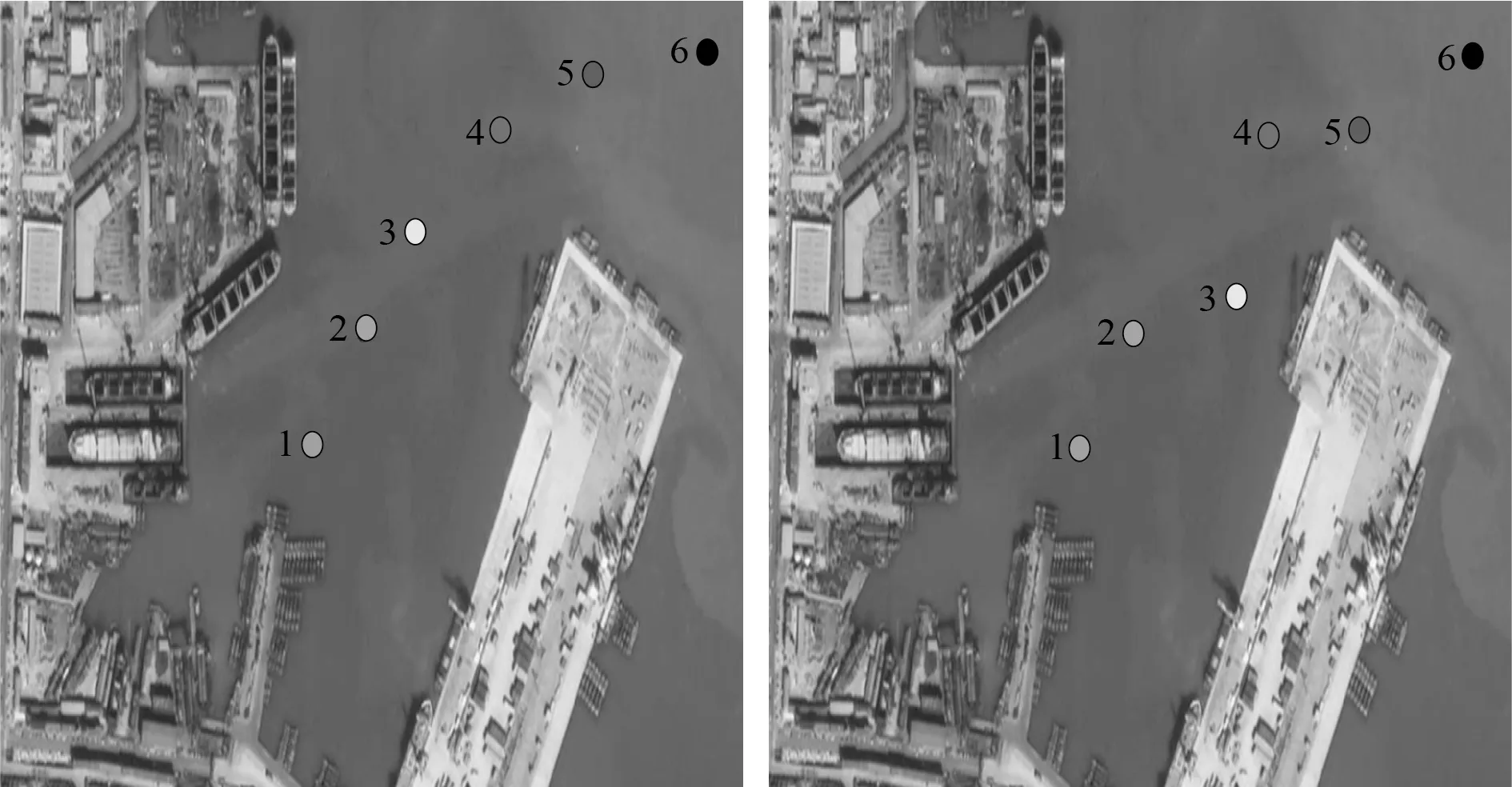
图3 航标匹配结果Fig.3 Results of beacon matching
可知,本文方法可有效成功匹配船舶航标,并对其进行编号,船舶航标匹配成功后,继续利用本文方法计算匹配成功的船舶航标间的漂移量,计算结果如表1 所示,航标漂移的报警阈值是50 m。

表1 船舶航标的漂移量计算结果Tab.1 Calculation results of drift of ship's beacon
可知,本文方法可有效计算船舶航标漂移量,完成航标漂移监测,其中编号为3 的航标漂移量最大,且超过了报警阈值,需及时对该航标进行处理,避免影响船舶航行安全,其次编号为5 的航标漂移量也较大,但并未超过报警阈值,需实时观察其变化情况,其余4 个航标的漂移量非常小。实验证明:本文方法具备船舶航标漂移监测的可行性。
3 结 语
利用尺度不变特征变换算法提取高分辨率遥感影像内航标位置信息特征点,结合欧式距离进行特征点匹配;利用相关系数编组的目标提取算法,在高分辨率遥感影像内,提取船舶航标目标区域;聚类处理船舶航标目标区域内的航标,获取航标编号与中心点坐标等信息;通过相位相关法,计算匹配成功航标的漂移量。结果证明,本文所提方法可有效提取航标位置信息特征点,成功匹配航标,并计算处航标漂移量,对所需监测范围内全部航标的漂移情况进行有效监测,为提升船舶航行安全提供保障。
