一种双锥阵稳健水下目标噪声测量方法
2023-09-16王泽海鄢社锋
曾 迪,张 震,王泽海,鄢社锋
(1.中国科学院声学研究所, 北京 100190;2.中国科学院大学, 北京 100049)
0 引 言
水下目标辐射噪声的测量对水下移动平台的发展至关重要,是发展低辐射噪声水下移动平台的重要参考条件。对水下目标辐射噪声进行测量,需保证测量阵列在一定带宽范围内有恒定的主瓣宽度。且在浅海条件下进行测量时,还需考虑到浅海波导界面反射能量对测量结果的影响。随着目标辐射噪声的逐年降低,测量系统经历了单阵元、垂直阵到体积阵的不断演变[1-3]。美国等国家率先将双锥阵等体积阵结构应用到噪声测量中,双锥阵具有较宽的水平向主瓣宽度和较窄的俯仰向主瓣宽度,有利于确保目标在波束主瓣内同时抑制界面反射的干扰,能较好满足噪声测量的需求[4]。
恒定束宽波束形成器是宽带噪声测量的基础5]。现有方法利用嵌套阵、聚焦变换等方法实现恒定束宽,但大多应用于均匀线阵。应用于双锥阵的嵌套阵方法对阵元数量要求高,布放难度大。本文通过建立双锥阵噪声测量的信号模型,利用双锥阵作为测量阵列,同时引入一种低旁瓣稳健的恒定束宽波束形成方法,有效解决噪声测量中的多径干扰抑制和二维稳健恒定束宽波束形成问题。
1 双锥阵稳健宽带波束形成
1.1 双锥阵噪声测量信号模型
在浅海波导环境中,双锥阵列第l个阵元接收到的频率为f的复声压信号可以表示为:
式中:S(f) 为 复声源幅度;G(rl,dl,zs,f)为频域格林函数;n(f)为 噪声;rl和dl分别为声源与第l个阵元之间的距离和阵元深度;zs为声源深度。根据射线理论,浅海波导的格林函数可表示为:
式中;Ai和 τi分别为第i个特征声线的幅度和传播时间; δ[·]为冲激函数。不同多途声线的到达时间和到达角度不同,在噪声测量中,需保留直达波而抑制其他多途信号。
考虑如图1 所示的双锥阵结构,假设接收阵列最上方阵元深度大于声源深度且声源位于y轴方向,则每个阵元与辐射声源之间的相对距离及每个阵元的接收深度可表示为:
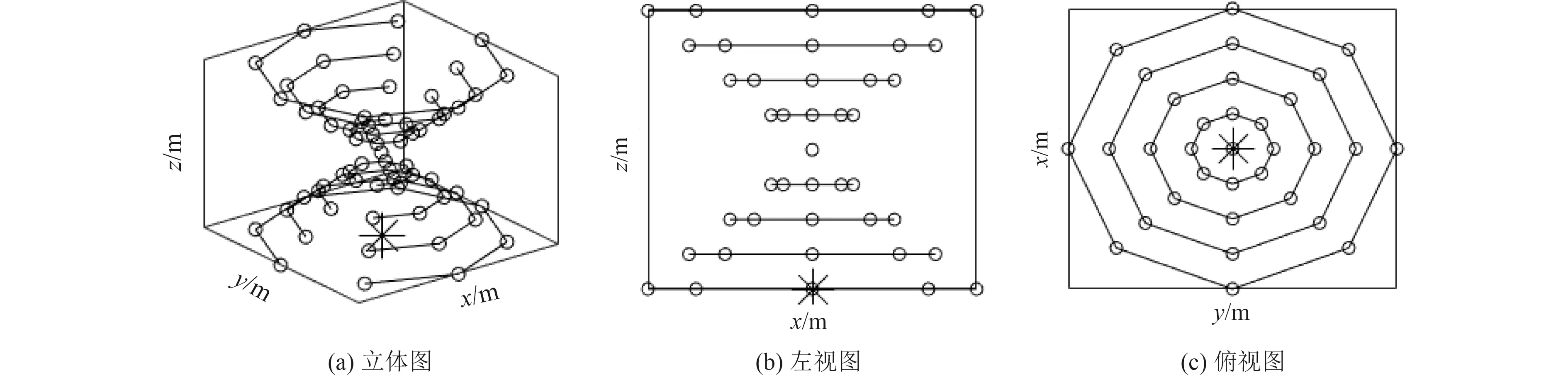
图1 双锥阵示意图Fig.1 Views of the biconical array
式中: θl=arctan(-yl/xl) ;r0和d0分别为参考点的距离和深度; {xl,yl,zl}分别为各阵元相对参考点的坐标。
1.2 二维稳健恒定束宽波束形成
为了在俯仰方向有较低的旁瓣,在水平方向同时具有较宽的3 dB 主瓣宽度和较低的旁瓣,本文将低旁瓣稳健波束形成方法扩展到二维场景中,通过分别设计俯仰角和水平角的旁瓣约束达到旁瓣控制的目的。
根据图1 所示的双锥阵结构,假设俯仰角 θ为入射方向与z轴的夹角,方位角 ϕ为入射方向在xy平面投影后与y轴的夹角,则双锥阵各阵元相对参考阵元的时延差可表示为:
式中:u=(sinθcosϕ,sinθsinϕ,cosθ)为来波方向的单位方向向量;el=(xl,yl,zl)为 第l个阵元的位置坐标;c为参考声速。双锥阵对每个方位的向量为:
对于二维低旁瓣稳健波束形成方法,通过观察方向无失真响应、最大旁瓣值最小以及权重向量的范数约束,实现低旁瓣稳健波束形成,保证其他方位的多途干扰被有效抑制,降低其他方位噪声源对目标噪声测量的影响,从而提高测量准确度。由于水平角和俯仰角主瓣宽度和旁瓣抑制的需求存在差异,需要对2个方向的主瓣和旁瓣分别设计。因此,求解波束形成加权向量w的约束优化问题可表示为:
通过引入额外的权重参数 λ,实现俯仰角和水平角的旁瓣分别设计,以满足噪声测量的需求。
该二维低旁瓣稳健波束形成方法在设计频率处有很好的旁瓣抑制效果,且水平角和俯仰角的主瓣宽度均能满足要求,但在其他频率处的效果不好。通过将设计频率处的波束图作为参考波束,利用聚焦变换实现恒定束宽。
聚焦变换利用一个聚焦矩阵T将不同频率的信号数据聚焦到参考频率f0上。本文采用旋转信号子空间方法作为聚焦处理器,使得聚焦后的方向响应向量与参考频率处的误差最小:
结合两式即可获得恒定束宽的波束输出。
2 仿真分析
2.1 测试条件
为实现真实浅海波导环境下对200~1000 Hz 范围内的宽带信号的测量,基于BELLHOP 模型,对双锥阵恒定束宽方法进行测试。
环境参数如下:海水深度150 m,测量距离200 m,接收深度100 m,目标深度50 m。假设水下目标直径12 m,长度100 m,测量距离200 m,则垂直方向-3 dB 主瓣宽度最小要求 a rcsin(6/200)×2=3°,水平方向 -3 dB 主瓣宽度最小要求 a rctan(50/200)×2=28°。垂直主瓣要求较窄,容易满足;而水平主瓣要求较宽,需要进行波束设计。此外,浅海波导中声线传播情况如图2 所示,存在较强的界面反射信号,直达波、海面反射波和一次海底反射波到达角度分别为76°、 5 2°、1 27°,需要对除直达波外的多途信号进行抑制。
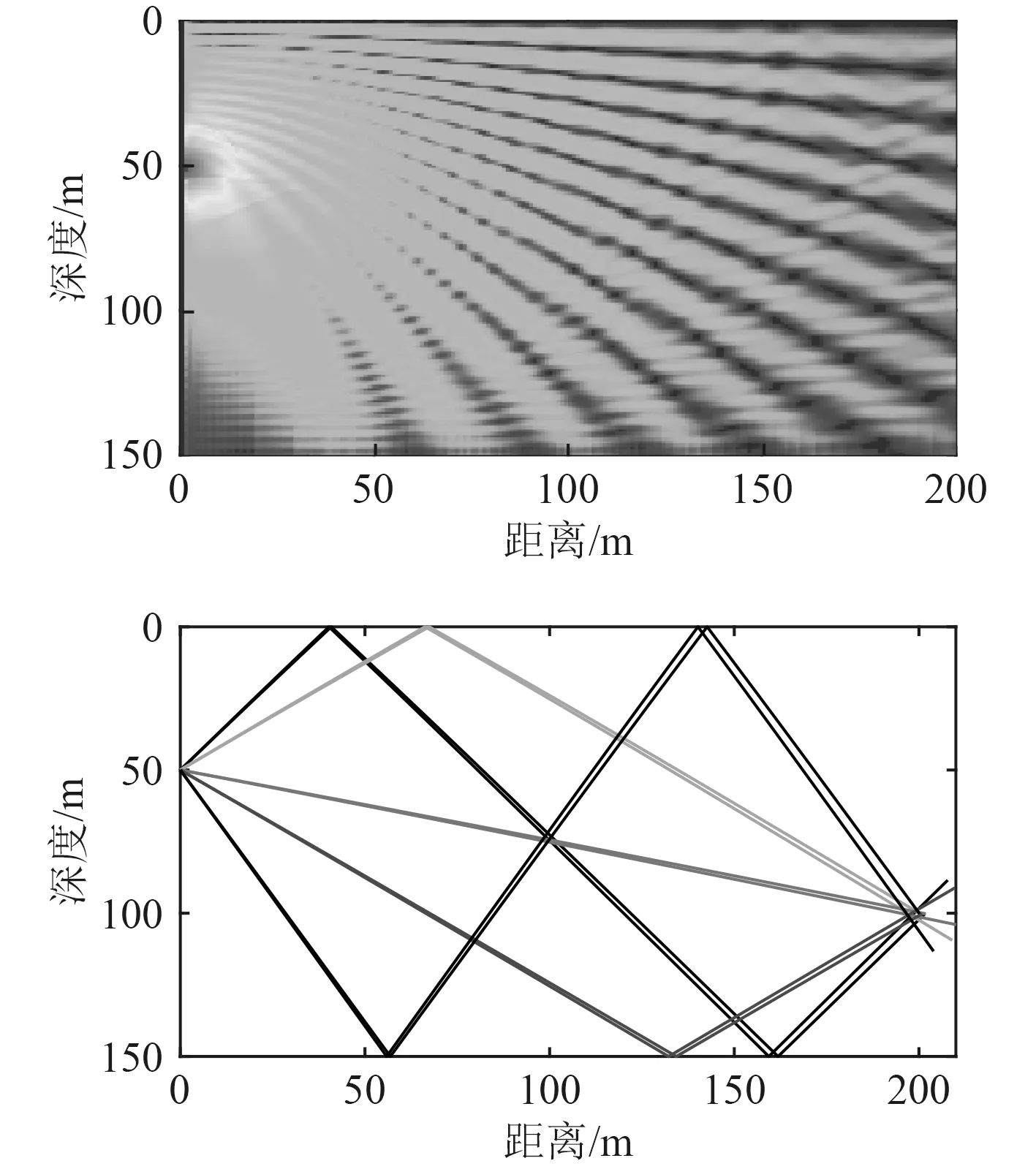
图2 浅海波导下的传播损失及特征声线Fig.2 Transmission loss and sound rays in the shallow water waveguide
2.2 稳健恒定束宽波束形成方法
考虑如图3 所示的双锥阵结构,共9 层8 列,层高为0.5d,最大半径为3d,d为最小频率对应的半波长。假定波束形成器的主瓣指向直达波方向 7 6°,处理的频率为200~1000 Hz。
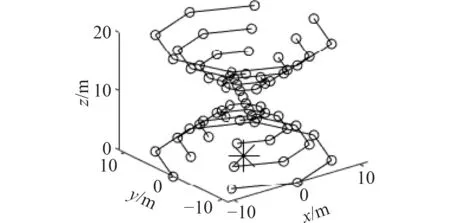
图3 双锥阵结构及各阵元坐标示意图Fig.3 The structure and coordinates of each array element of the biconical array
图4 为本文方法在俯仰方向和水平方向的宽带波束图,图5 为各频率处波束图的叠加,不同频率处的波束图与参考频率处基本一致,旁瓣低于 -40dB,能有效抑制多径信号,且水平方向 -3dB 主瓣宽度为29°,满足结构噪声源测量需求。
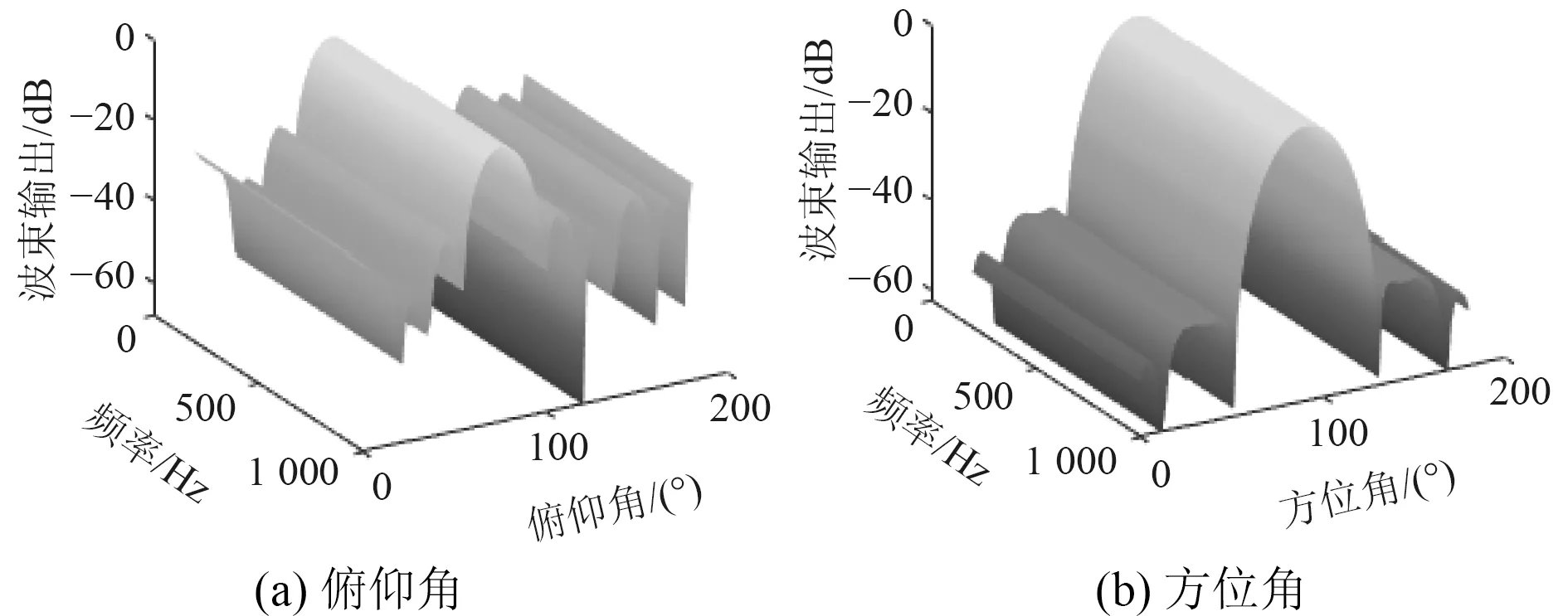
图4 双锥阵二维低旁瓣稳健恒定束宽波束形成器波束图Fig.4 Beam patterns of the robust constant beamwidth beamformer
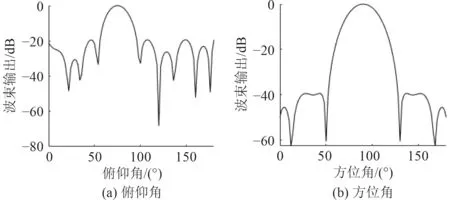
图5 不同频点上的恒定束宽波束叠加后的波束图Fig.5 Beam pattern of constant beamwidth beamformer at different frequency points
2.3 水下目标辐射噪声测量性能分析
仿真测量信号为声源信号经BELLHOP 仿真信道传输后的阵列信号,信噪比为5 dB。声源信号波形和频谱及浅海波导信道的时频特征如图6 所示,可看到,在浅海波导中,受界面反射的影响,信道特征在时域上呈现明显的多途特性,而在频域则体现为周期震荡,造成单水听器接收信号失真。
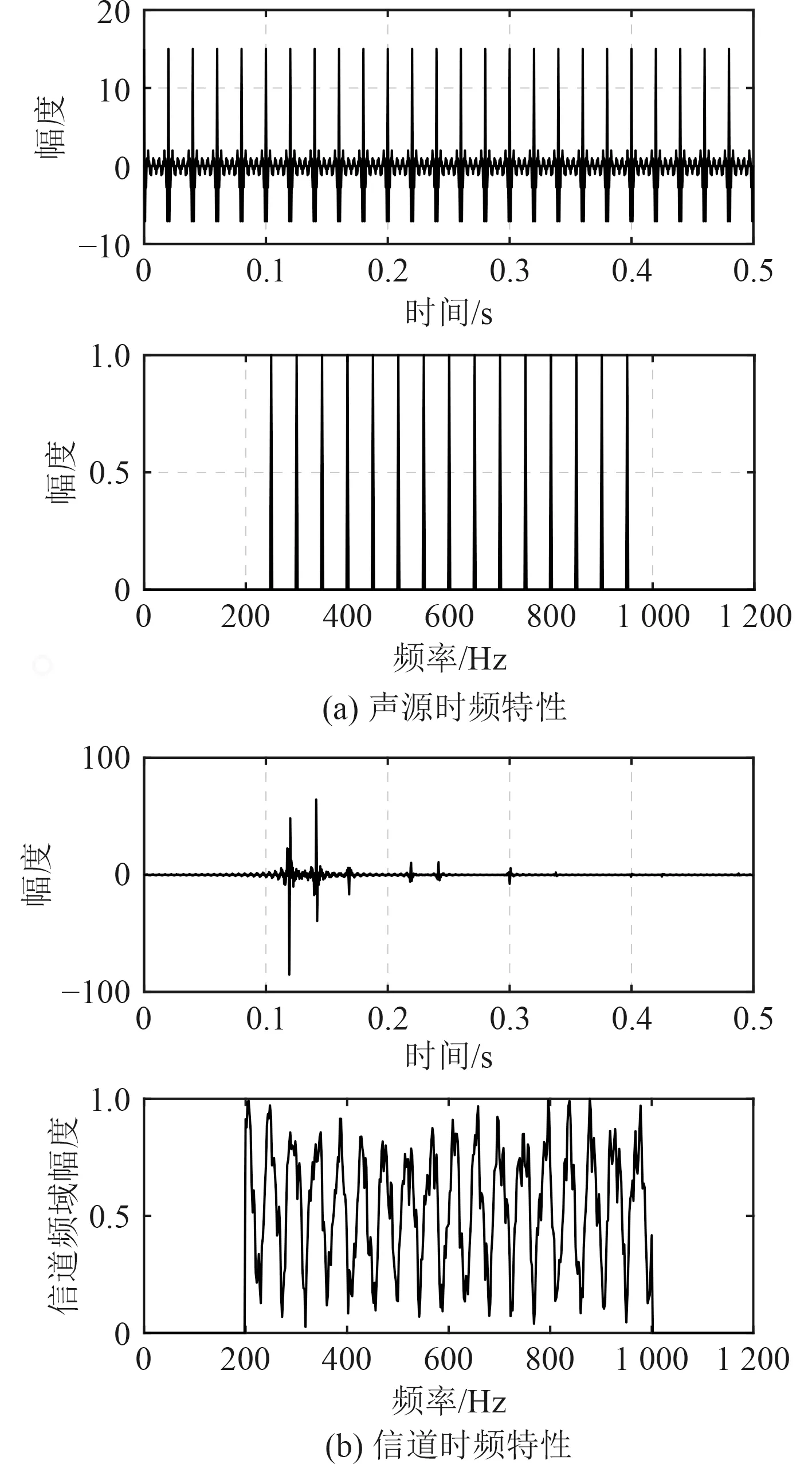
图6 声源信号时域波形和频谱以及浅海波导信道的时频特征Fig.6 Time-domain waveform and spectrum of sound source and time-frequency characteristics of shallow water waveguide
图7 为浅海波导下,多频信号的双锥阵恒定束宽波束输出结果。可看到,在浅海波导中,受界面反射的影响,单阵元信号的时频波形都存在明显的失真。常规波束形成方法的主瓣宽度随处理频率增加而减小,因此在波束输出中体现出明显的低通滤波器效应,且随频率变化有明显起伏,表明其不能有效滤除界面反射信号的干扰。本文提出的测量方法能够保证信号波形不失真,因此更准确地测量噪声能量。单水听器、常规波束形成以及本文方法的测量结果误差分别为7.1 dB、4.1 dB、0.7 dB,表明该方法在噪声测量中的可靠性。
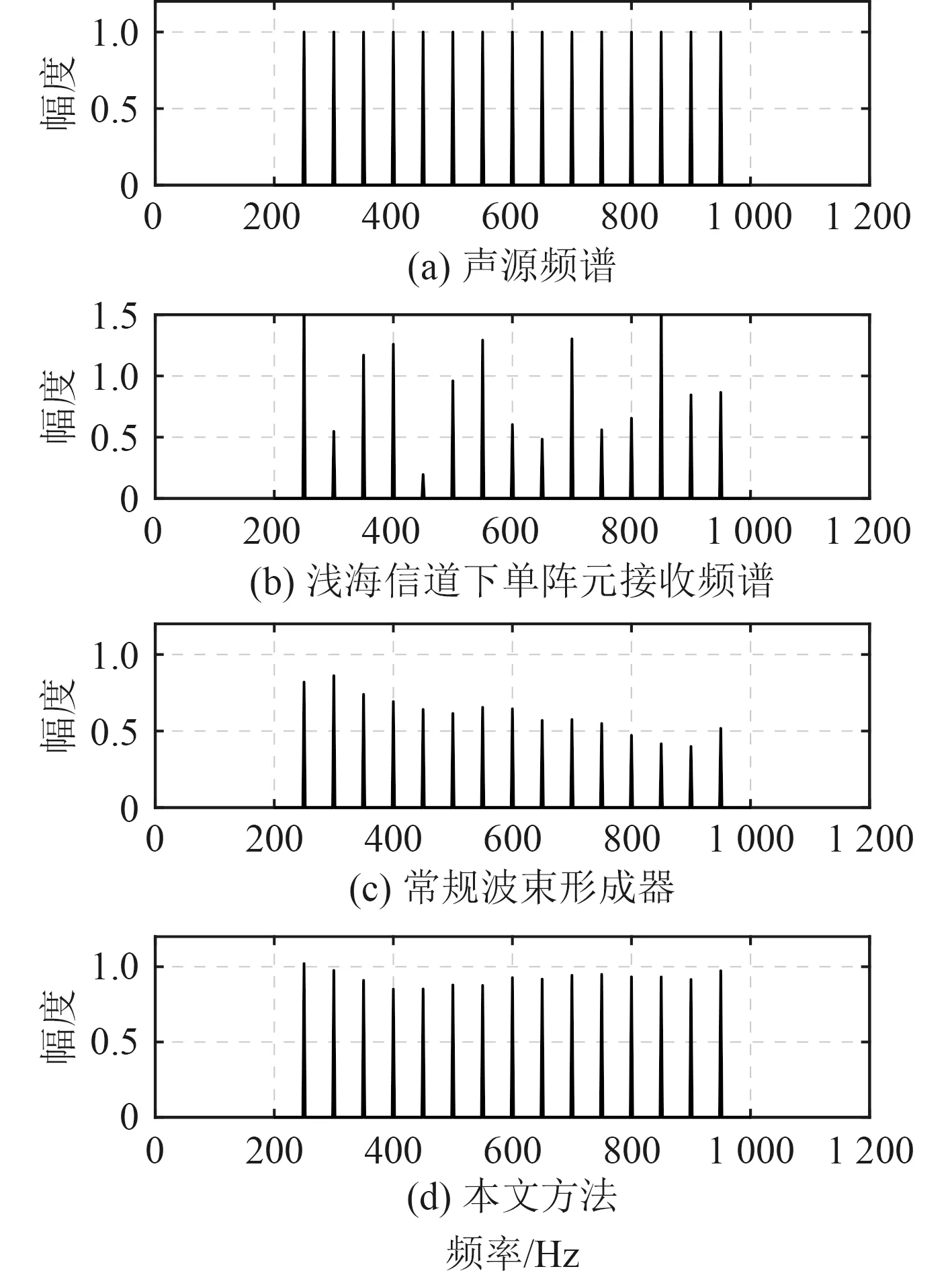
图7 声源频谱、单水听器接收信号频谱、常规波束形成器及本文方法的波束输出Fig.7 Source spectrum, receive signal of the single hydrophone,conventional beamformer and beam output of the proposed method
3 结 语
本文分析了浅海波导对噪声测量的影响,建立了浅海波导环境中的双锥阵信号模型。通过引入低旁瓣稳健的恒定束宽波束形成方法,在水平和垂直2 个方位均获得低旁瓣的恒定束宽波束图,有利于浅海波导噪声测量中缓解界面反射信号对测量结果的干扰。仿真结果表明,本文提出的二维恒定束宽波束形成方法能有效应用到双锥阵噪声测量系统中,相比单阵元和利用常规波束形成的测量方法,测量准确性更高。
