基于声辐射模态的水下航行器传感器优化配置研究
2023-09-16汤智胤邹海龙喻柳丁沈惠杰马锐锋
汤智胤,邹海龙,喻柳丁,李 想,沈惠杰,马锐锋
(1.海军工程大学 动力工程学院,湖北 武汉 430033;2.海军工程大学 军用电气科学与技术研究所,湖北 武汉 430072)
0 引 言
海战场对抗环境下水下航行器的隐身性,特别是声隐身性是其最基本和最重要的技术性能[1-3]。评估水下航行器的隐身安全性,一种常用的方法是依靠航行器壳体表面安装的振、声传感器测量得到。然而在航行器的振、声传感器数量确定之后,如何能利用有限的传感器得到更多信息,从而更精确地评估水下航行器的隐身安全性呢?这就需要进行水下航行器的传感器优化配置研究。
对于航行器壳体传感器,通常最主要且数量最多的传感器是壳体加速度传感器[4]。对于大量的加速度传感器,如何能够合理地将其布置在航行器壳体上,最大程度地采集航行器的振动信息,从而更加精确地进行声隐身安全性评估,是本文所研究的内容。本文利用声辐射模态理论,对航行器壳体加速度传感器优化配置进行研究。
1 传感器优化配置方法及步骤
近年来,国内外学者们提出了声辐射模态理论[5-8]。声辐射模态及其辐射效率类似于振动问题中的主振形和固有频率。声辐射模态是矢量空间中一组相互正交的基,每组基代表一种可能的辐射形式。每一声辐射模态对应一个独立的辐射效率。声辐射模态的形状由辐射体的几何形状和振动频率决定[9]。在中、低频时,声辐射模态的辐射效率随着阶数的增加而快速降低,所以仅利用前几阶声辐射模态就能近似计算出总声功率。每一阶声辐射模态的声功率是相互独立的。利用声辐射模态理论研究声辐射问题的优势在于消除了结构模态中复杂的耦合项,使研究更简单[10,11,16-18]。
若仅针对水下航行器辐射噪声预报问题进行传感器优化配置,其目标是寻找对于辐射声功率最大的前若干阶声辐射模态进行监测,从而进行传感器位置的优化布置。然而对于水下航行器声隐身状态评估而言,并不是辐射噪声能量越大的声辐射模态,对水下航行器声隐身状态贡献也越大。因为水下航行器声隐身状态还取决于对抗方声呐的探测性能和海洋声传播损失[12]。所以,对于面向水下航行器声隐身状态评估的传感器优化配置,除了考虑声辐射模态的辐射效率外,还需考虑传播损失以及对抗方声呐在不同频率上的不同特性。基于水下航行器声隐身状态评估的艇载传感器优化配置可按照以下步骤进行:
1)确认水下航行器频谱中对声隐身状态影响最大的频率成分。
进行航行器水下航行实验时,测量其辐射噪声,并针对航行器声隐身状态中最敏感的频率成分,与声呐测量和水下声传播相结合,锁定最敏感频率成分。
令航行器水下辐射噪声的线谱成分分别为fii=1,2,···,n,其对应频率的声强度分别为sl(fi)i=1,2,···,n;设航行器遭遇最常见的对抗方声呐在这些频率成分上的探测能力分别为ds(fi)i=1,2,···,n;航行器通常执行任务的海区在这些频率成分上的传播损失分别为tl(fi),i=1,2,···,n。令函数
可表示航行器声隐身状态的安全程度,则频率fst则为st(fi)i=1,2,···,n取最大值所对应的频率,即
2)将该频率按照声辐射模态进行分解,得到对声隐身状态贡献最大的前若干阶声辐射模态。
在进行传感器优化配置之前,可先将传感器均匀地布置在壳体上,作为传感器初步配置方案。这样将航行器振动表面划分成若干面积相等的单元,在某频率成分各单元上的法向速度构成的向量为v∈Rg×1,对应各单元的表面声压为p,则
其中,Z为每个单元的振动速度与表面声压之间的声阻抗矩阵。而辐射声功率为:
由于即考虑了声辐射功率,又考虑了海洋传播损失和对抗方声呐的探测能力,所以对于频率fst上的辐射声贡献越大的声辐射模态,则对于航行器声隐身状态的贡献也越大,需投入尽量多的传感器进行监测;对于S贡献较小的声辐射模态,则对声隐身状态贡献较小,可以忽略。
3)结合传感器数量限制,针对前若干阶声辐射模态型进行传感器布置,最有效地监测这些声辐射模态。
当算出前若干阶对航行器声隐身状态贡献较大的声辐射模态后,针对这些声辐射模态进行传感器优化布置。传感器优化配置时,只需将传感器按照其数量要求,来监测前若干个对航行器声隐身状态贡献较大声辐射模态。
对于这种模态已知情况下的传感器优化配置问题,国内外已经研究得较为成熟。其中常用的方法包括有效独立法、Guyan 模型缩减法等。有效独立法利用Fisher 信息阵使关心的模态向量尽可能线性无关,从而采集到最大的模态反应信息[13];Guyan 模型缩减法通过刚度或质量子矩阵构成的转换矩阵,把那些对模态反应起主要作用的自由度保留下来作为测点的位置[14];Thomas 等[15]认为选择的测点位置应使所有模态向量的内积具有较小的余弦值。总而言之,这些优化方法都能起到使测点远离各振型节点的作用,从而利用较少的传感器监测关心的模态。
利用声辐射模态理论进行面向航行器声隐身状态评估的传感器优化配置,最主要的优点在于消除了结构模态中复杂的耦合项,且在中、低频时的辐射效率随声辐射模态阶数的增加而迅速降低,少数的前几阶声辐射模态对航行器的声隐身状态有很大的贡献[16]。而本方法的难点则需事先计算出航行器的声阻抗矩阵,这是实船应用中最主要的问题。
2 仿真验证
取类似水下航行器的椭球壳体结构作为研究对象,椭球模型长轴为5 m,两短轴均为1 m;结构材料密度 ρ=7850 kg/m3,结构材料的杨氏模量E=2.1×1011,损耗因子为0.3,外场介质为水,声速c0=1500 m/s。
假设结构的激励同航行器类似存在若干种固定的激励模式,即存在有限个工况。并假定在5 种常用工况下,对声隐身状态影响最大的5 个频率的辐射噪声分别为:10 Hz(kl=0.42 ,k为波数;l为结构的最大尺寸)、8 0 H z(kl=3.35 )、1 0 0 H z(kl=4.19)、125 Hz(kl=5.24 )、160 Hz(kl=6.70)。利用声辐射模态理论,计算得到该5 个频率前4 阶声辐射模态形式如图1~图5 所示。这5 个频率前4 阶声辐射模态对应的特征值如表1 所示。
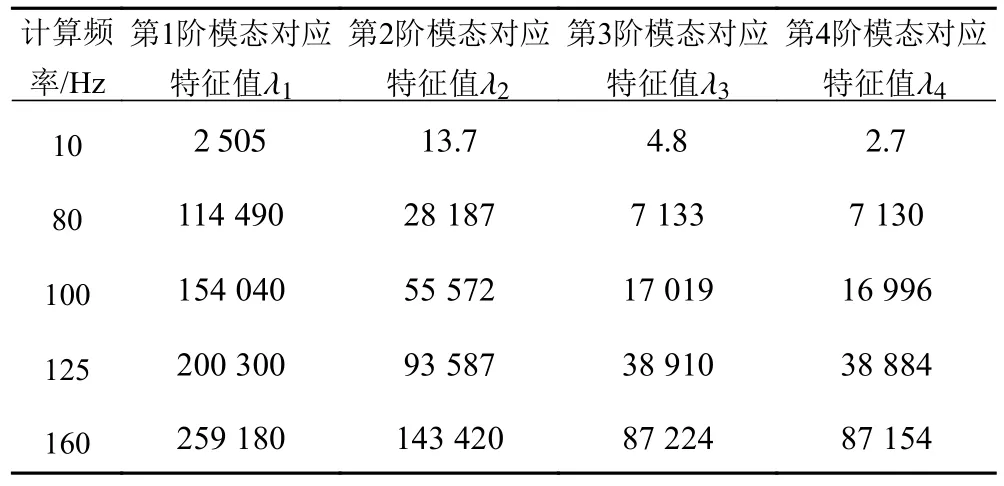
表1 不同频率各阶声辐射模态对应的特征值Tab.1 Eigenvalues corresponding to each acoustic radiation modes in different frequency
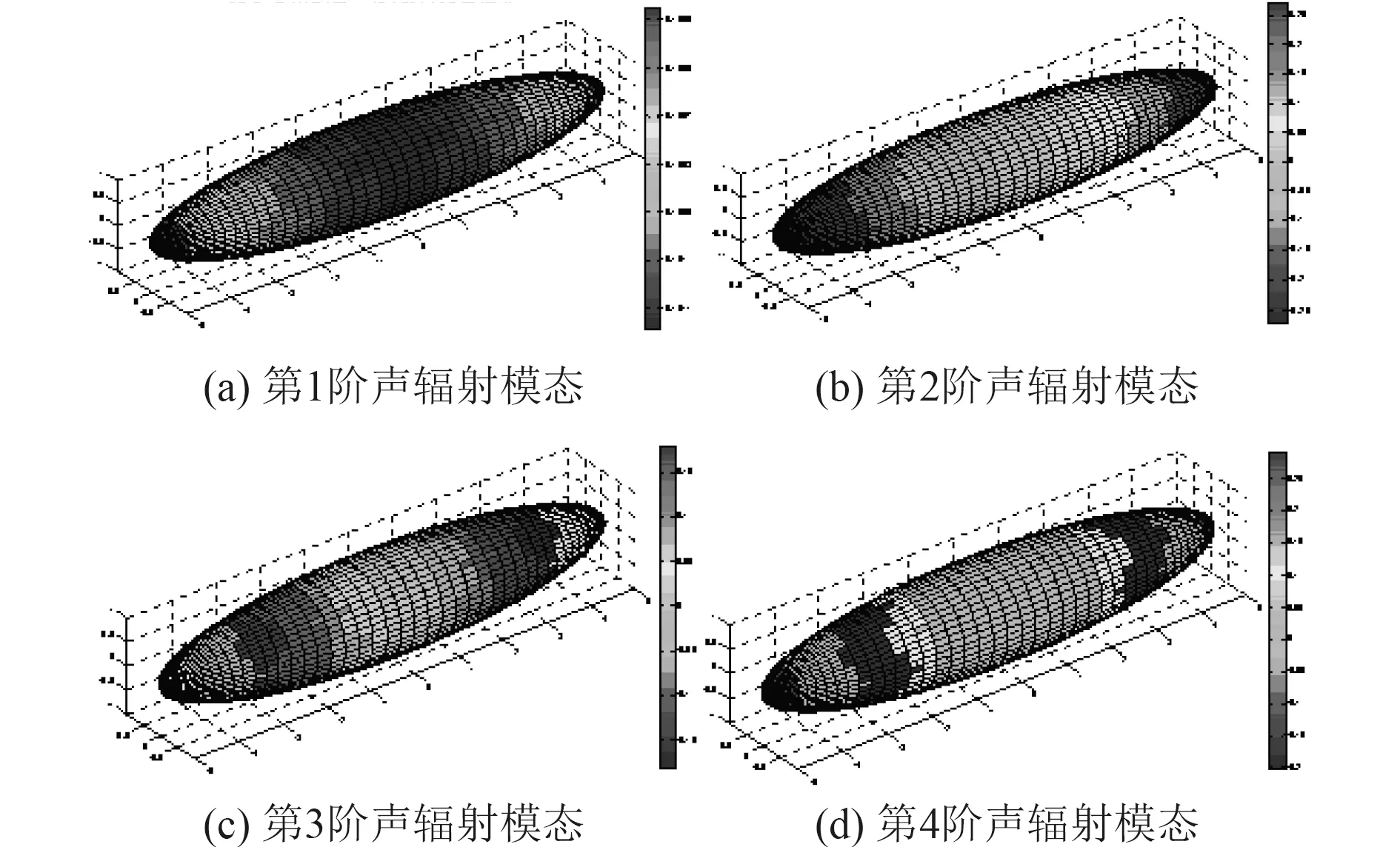
图1 10 Hz 时结构的前4 阶声辐射模态Fig.1 The first 4 acoustic radiation modes of the structure in 10 Hz
图2 80 Hz 时结构的前4 阶声辐射模态Fig.2 The first 4 acoustic radiation modes of the structure in 80 Hz

图3 100 Hz 时结构的前4 阶声辐射模态Fig.3 The first 4 acoustic radiation modes of the structure in 100 Hz
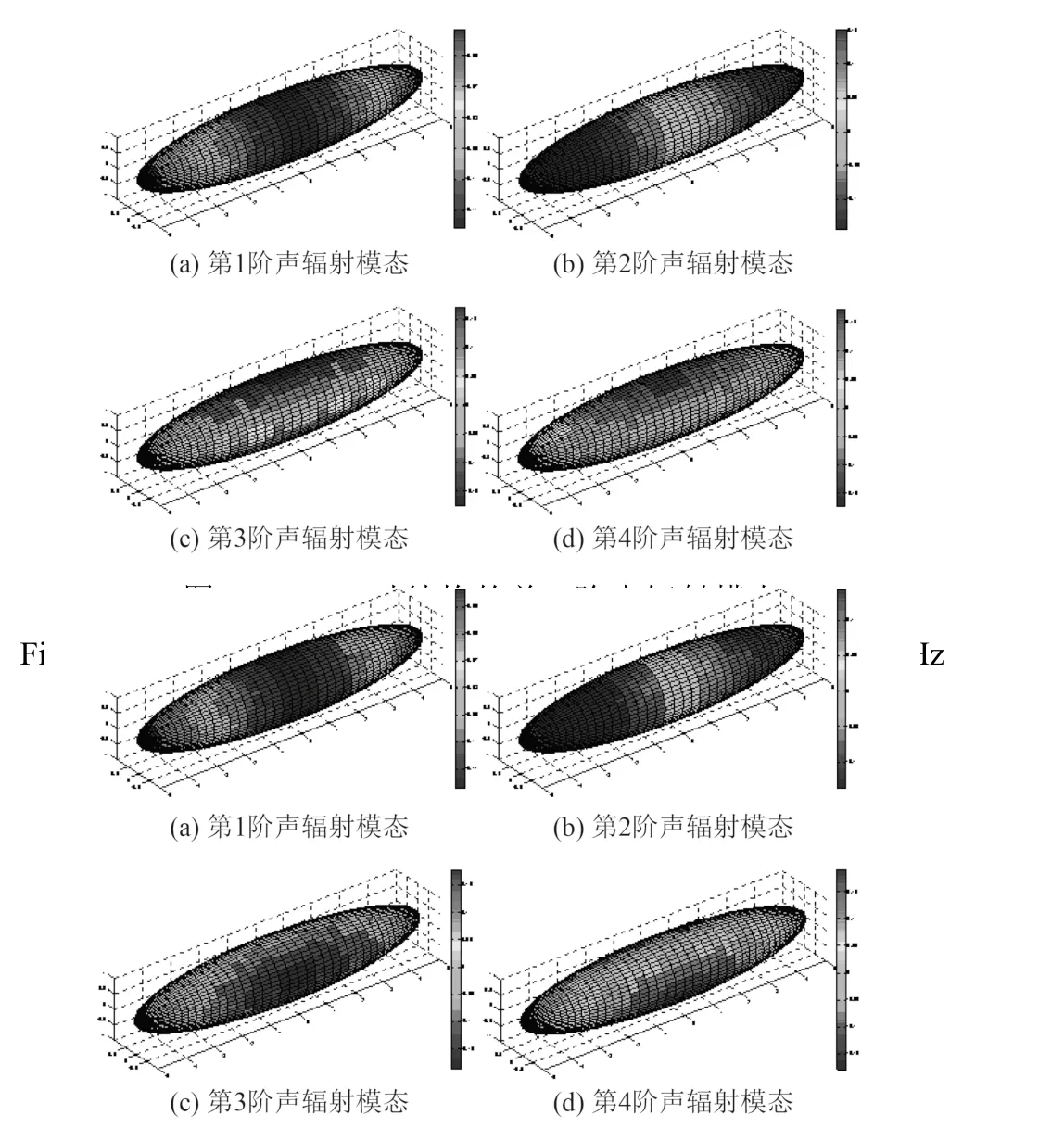
图5 160 Hz 时结构的前4 阶声辐射模态Fig.5 The first 4 acoustic radiation modes of the structure in 160 Hz
可以看出,在低频(kl<2π ,k为波数;l为结构最大尺寸)时,各阶声辐射模态对应的特征值λi(i=1,2,3,4)随模态阶数的增加而迅速降低,即各阶声辐射模态对声隐身状态的贡献程度随模态阶数的增大迅速减小。特别地,前2 阶模态所对应的特征值要比其他高阶模态的特征值大得多,即对声隐身状态的贡献也大得多。而且,从图1~图5 中可观测到,5 个频率的前2 阶声辐射模态的形式基本相同,即中间和两端部较强,且为轴向对称。所以,可根据壳体振动加速度传感器数量限制,着重监测前2 阶声辐射模态,即两端和中间部分。当然,在传感器数量较大情况下,除了前2 阶声辐射模态外,还可由低到高顺序针对其他声辐射模态进行传感器优化布置,以达到更好地进行声隐身状态评估的目的。
3 结 语
本文针对在水下航行器壳体振动传感器数量确定的情况下,如何更好地对传感器的位置进行优化配置,以提高水下航行器声隐身状态评估准确度问题展开研究,提出了基于声辐射模态理论的传感器优化配置方法,给出了初步的优化配置方案,并通过算例分析证明了方法的实用性。
由于实际水下航行器的数据难以获取,文中算例以类似水下航行器的椭球壳体结构为研究对象,旨在说明方法的可行性。虽然实际水下航行器结构比算例中所研究的规则椭球体结构要复杂得多,然而在低频时,可类似一个椭球壳体。本方法用于实际航行器传感器优化配置的一个主要难点在于计算航行器的声阻抗矩阵。在实际应用中,可利用有限元边界元方法进行实船建模计算,算出声阻抗矩阵后再利用本方法进行传感器优化布置,以取得更准确的航行器声隐身状态评估结果。
