基于物联网通信技术的舰船导航控制系统
2023-09-16潘红娜蔡振兴张婷婷
潘红娜,蔡振兴,张婷婷
(江西工程学院 智能制造与能源工程学院,江西 新余 338000)
0 引 言
舰船导航控制系统对于保障舰船航行安全具有非常重要的作用。在航行过程中,舰船需要对自身的航线进行规划,同时岸基作战中心也希望能够对舰船进行全程跟踪,以便对所有的舰船进行全方位的控制和管理。传统的舰船导航依赖于GPS 导航或者舰载的AIS 系统等,AIS 在航行过程中会遇到通信盲区,很容易出现定位丢失的情况,而GPS 导航虽然应用较为成熟,定位精度也较高,但是属于西方国家的技术产品,在战时非常容易受到干扰或者掐断信号的情况。因而尝试将北斗导航系统和物联网技术充分融合以解决当前受制于GPS 通信的情况,同时物联网技术可以很好地将北斗导航系统短报文的功能加以融合,并将精确授时功能应用到导航控制系统中,从而实现对舰船航线的精确规划。
国内外有很多学者对智能导航进行了相关研究,如田向阳[1]研究了北斗导航系统在船舶导航中的应用,并和GPS 导航进行对比。张宁[2]对北斗导航及通信技术中的关键技术进行了研究,设计了低噪音的信号放大模块。肖学玲[3]提出使用物联网技术进行多源融合,从而使得船舶能够获取更多的位置信息,包括和其他船舶的相对位置以及导航定位位置等,最大程度地避免船舶碰撞问题。
本文对北斗导航技术、物联网技术等进行总结,提出一种基于物联网通信技术的舰船导航控制系统,旨在解决舰船导航和定位容易在战时受到干扰的情况,提升舰船在战时的作战能力。
1 关键技术
1.1 北斗导航技术
北斗导航是北斗卫星导航技术的简称,在2003 年完成了第一代系统的组建,随后进入了大规模的应用阶段。北斗卫星导航共包括35 颗卫星,其中27 颗为中轨道卫星,5 颗静止轨道卫星,3 颗为倾斜轨道卫星。北斗卫星导航技术实现的原理如图1 所示[4-5]。
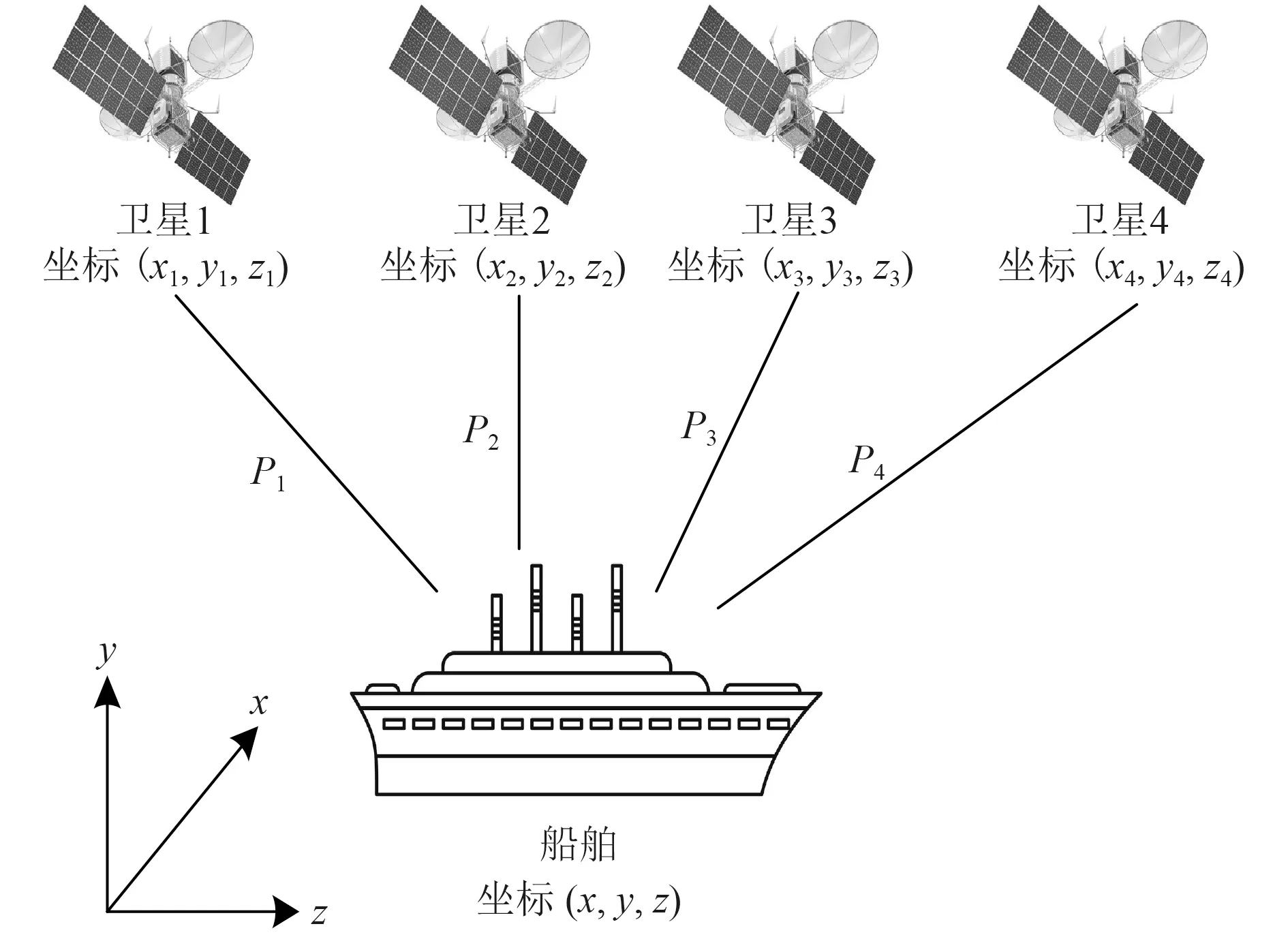
图1 北斗导航原理Fig.1 Principle of Beidou navigation
当船舶在行驶过程中,建立(X,Y,Z)坐标系,则行驶的船舶和空中的导航卫星都具有一个唯一的空间坐标,卫星1~卫星4 和船舶之间的距离为P1~P4,这些变量之间满足以下关系[6-7]:
式中:c为光速,Δt为地面接收的时间差值,均为已知数值,因而可以根据上述关系计算出船舶当前的坐标,进而结合电子海图实现导航。
1.2 物联网技术
物联网技术是目前应用非常广泛的技术之一,其可以用于船舶货物运输的跟踪、舱室监控等。物联网技术是通过各种感知技术,包括各类传感器、射频技术、激光扫描、全球定位技术等,将各类不同的物体连接到一个网络中,实现信息的传递和共享。
物联网系统包括感知层、网络层和应用层,如图2所示。感知层包括传感器、RFID 条形码、北斗接收机等获取当前目标的位置信息和其他信息;网络层是利用以太网以及4G 网络将获取的目标信息发送出去;应用层直接面对用户,用户可以通过获取的信息并在此基础上构建页面,实现功能的具体化表达。在物联网架构中,感知层是物联网技术的关键,感知的方法多种多样,在物联网中不仅可以使用RFID 技术通过标签读取的方法来获取目标信息,同时还可以通过底层传感器节点来获取信息,而这些传感器节点不仅可以是有线的,也可以通过无线网络来实现感知信息的传递,因而具有极大的灵活性。

图2 物联网架构Fig.2 IOT architecture
2 基于物联网通信技术的舰船导航控制系统设计
2.1 基于物联网的北斗导航节点设计
由于AIS 在舰船导航中会存在信号盲区的问题,因而一般AIS 系统都需要和雷达联合使用,但是仍然存在着导航精度不高的问题。为了提升舰船的作战能力,保证舰船能够在不同情况下实现不间断地高精度导航,使用物联网技术设计专门的北斗导航模块是有必要的,设计的北斗导航模块是现有导航系统的必要补充。
设计的基于物联网的北斗导航节点硬件结构框图如图3 所示。
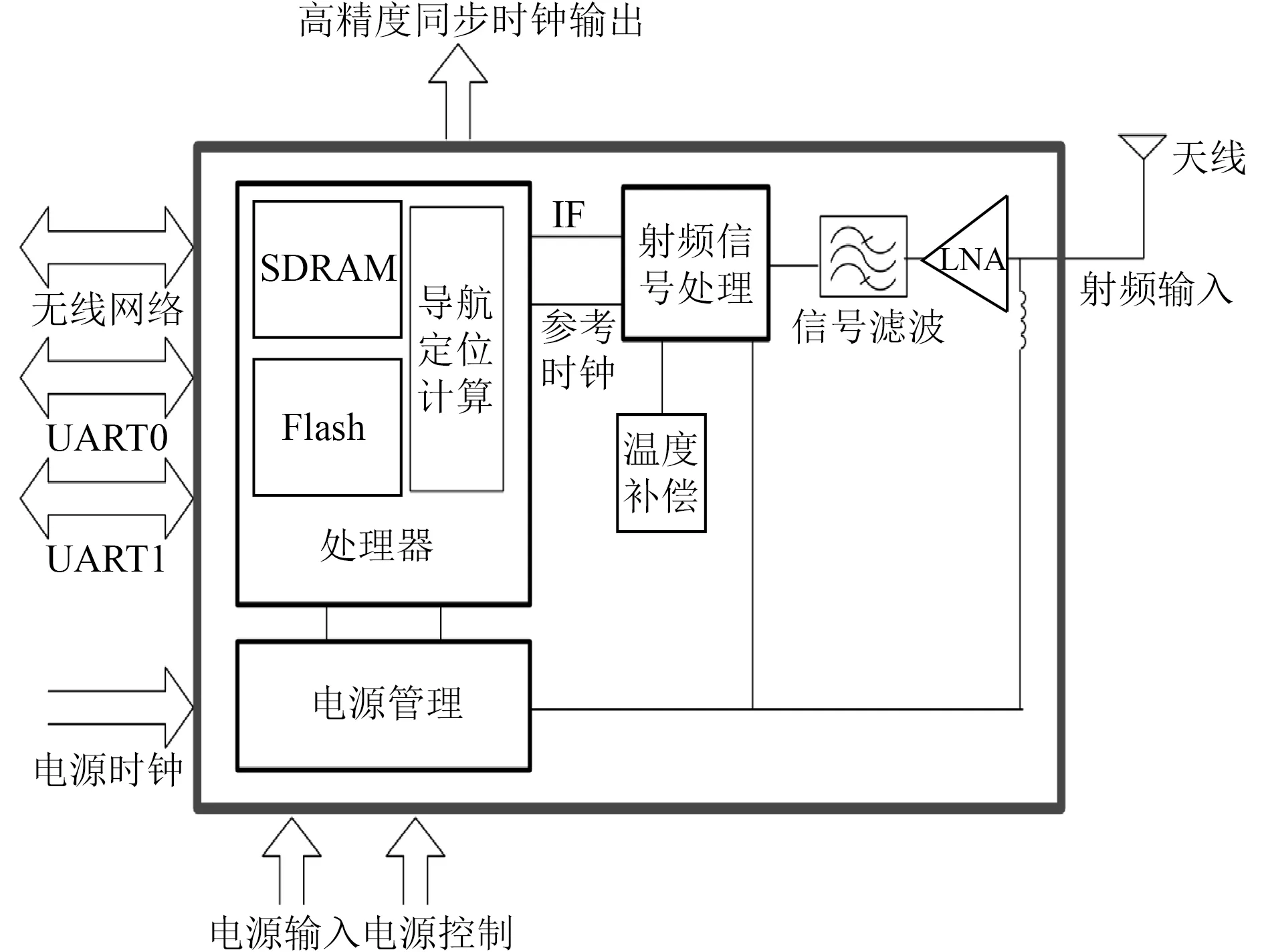
图3 基于物联网的北斗导航节点硬件结构Fig.3 Hardware structure of Beidou navigation node based on Internet of Things
1)信号输入及滤波:在天线处接收到北斗卫星导航信号后,使用专门设计的滤波电路将信号中的杂波滤除掉,以保证通信信号的稳定性。
2)射频信号处理:在进行射频信号处理前,考虑到舰船在航行时温度差距会非常大,因而设计温度补偿电路,对整个电路中存在的温度漂移进行补偿,有效提升电路的稳定性和可靠性。
3)处理器:处理器采用低功耗的ARM 芯片,包括SDRAM、Flash 等,在低功耗处理器中不仅可以实现对导航卫星数据的解算,同时还可以实现对相关数据的存储。在完成数据解算后通过串口UART0、UART1 或者无线网络向外传输数据,同时还可以对舰船上的其他物联网感知节点实现时间同步,以保证整个舰船物联网中感知的信息和时间完全同步,这个功能的实现是通过向外输出高精度的同步时钟,其精度可以达到1 PPS,其他节点或者感知传感器模块通过物联网接收同步秒脉冲,从而实现网络内时间的高度同步。
4)电源管理:基于物联网的北斗导航节点采用了低功耗设计,整个节点需要严格地进行电源管理,包括控制电源时钟、电源输入以及电源控制。为了尽量减小误差,整个系统冷启动的时间非常短,本文设计的节点冷启动时间<40 s,热启动时间<2 s。
2.2 物联网数据通信实现
本文采用Zigbee 技术来实现导航数据的传递,其通信距离最大可以达到100 m,但是通信速率<250 kbps,在舰船上由于存在较多节点,因而使用Zigbee 技术非常容易组成物联网的无线传输网络,且采用Zigbee 无线传输具有非常大的灵活性,功耗很低,特别适用于辅助导航系统。舰船的导航位置信息需要极高的安全性,Zigbee 技术采用AES128 对称密码,符合高级加密标准,因而满足舰船的保密性要求。
舰船的位置信息数据较小,Zigbee 的数据通信速率完全满足这种小数据量的传输要求,Zigbee 无线通信频率有多种,如图4 所示,不同的通信频率信道数量也不一样,868 MHz 只有一个信道,915 MHz 有10 个通信信道,2.4 GHz 有16 个通信信道,选择通信频率为2.4 GHz,这样能保证不同的通信信道不会发生串扰。
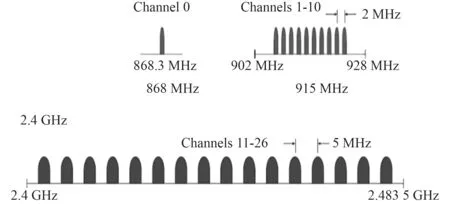
图4 Zigbee 通信信道分布Fig.4 Zigbee communication channel distribution
Zigbee 无线通信是基于物联网的舰船导航控制系统的关键组成部分,通过Zigbee 无线网络将北斗卫星导航位置信息发送到舰船控制中心,使得舰船在航行过程中可以不间断接收AIS 以及导航控制系统的位置信息。在通过信号盲区或者受到外界信号干扰时,舰船船员通过对比两者数据就可以更加准确地判断当前舰船的行驶状态,并通过和其他舰船的通信获取相对位置信息,为战时提升作战能力提供必要辅助。
2.3 系统测试
1)抗干扰能力测试:本文设计的导航控制系统是对AIS 系统和雷达的有效补充,因而抗干扰能力是系统的重要指标之一。使用误比特率作为系统测试指标,其基本定义为:
物联网技术具有极高的安全性和稳定性,和北斗卫星定位导航技术相结合,可以为舰船提供稳定的导航辅助。本文对物联网技术和北斗导航定位技术进行了阐述和分析;设计了基于物联网的北斗导航节点,分析了节点中各个模块的基本作用和实现原理;阐述了物联网数据通信实现的基本原理,对构建的基于物联网的舰船导航控制系统的抗干扰能力、静态和动态定位进行了测试,测试结果表明系统具有良好的抗干扰能力,同时静态和动态定位精度都较高。
对系统进行仿真测试,改变系统信噪比,测试不同信噪比下系统的抗干扰能力,图5 为基于物联网的舰船导航控制系统抗干扰能力测试结果,可以发现:系统的误比特率曲线和理论曲线相差很小,同时在信噪比较低时,舰船导航控制系统的误比特率为10-4,信噪比为8 db 时误比特率为10-9,因而说明系统具有较好的抗干扰能力。
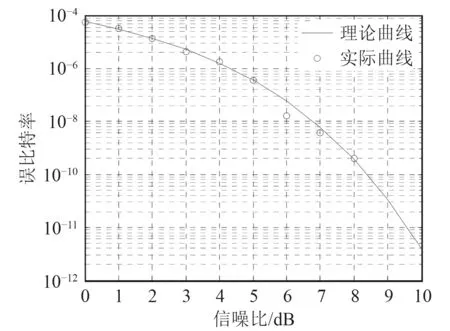
图5 系统抗干扰能力测试结果Fig.5 The test result of anti-jamming ability of the system
系统具有良好的抗干扰能力,这是由于在系统设计时实行了动态信道选择,在舰船上构建的Zigbee 网络具有很多的无线网络节点,包括温度、湿度、压强、武器设备的无线网络节点等,在进行动态扫描时会根据当前Zigbee 网络全部信道的空闲状态来设置相关参数,这样就能够降低不同信道干扰的可能性。当所有无线网络节点都开始工作时,整个Zigbee 网络会变得非常拥挤,在发送导航数据前侦听所有信道,可以有效减少由于信道拥挤而造成数据丢失。
2)导航定位能力静态测试:导航定位能力的测试分为静态测试和动态测试。静态测试是在不同的时间段让船舶行驶到不同的位置,使用AIS、GPS 以及本文设计的船舶导航控制系统对船舶进行定位,以测试船舶的单点定位精度。在测试中发现本文设计的导航控制系统和其他系统测试的结果存在差距,其原因是本文设计的北斗导航控制系统在获取北斗卫星数据后,在位置解算时没有考虑平流层对信号传输产生的影响,在采用相关算法对数据进行修正后,系统的静态定位精度得到了明显提升。
通过算法计算修正得到的测试结果如表1 所示,和AIS 系统的测试结果对比,误差均在0.1%以内,证明基于物联网的导航控制系统具有较高的精度。
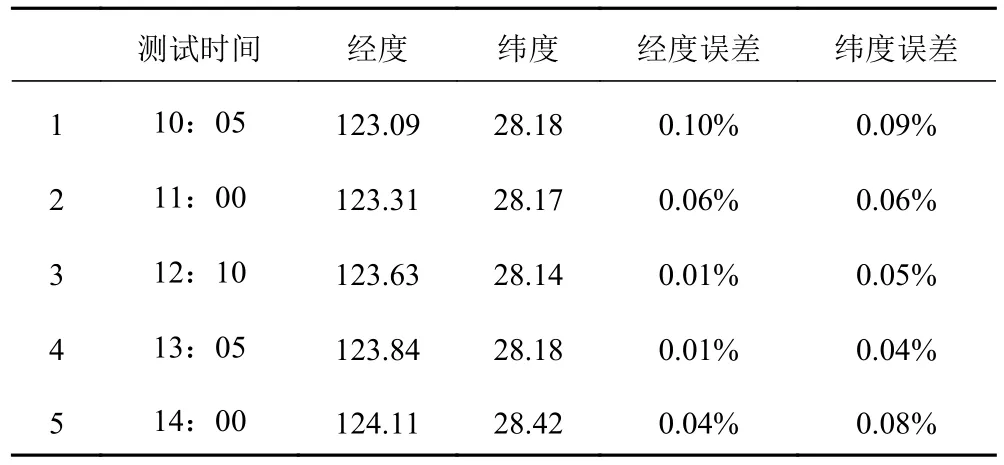
表1 导航控制系统静态定位测试Tab.1 Static positioning test of navigation control system
使用不同系统测试并监控该船舶在一段时间内的轨迹。在船舶上配置有高精度的AIS 系统和GPS 系统,将本文测得的船舶轨迹和AIS 记录的轨迹进行对比,如图6 所示,可以发现本文设计的导航控制系统测试的动态轨迹和AIS 动态轨迹基本重合。
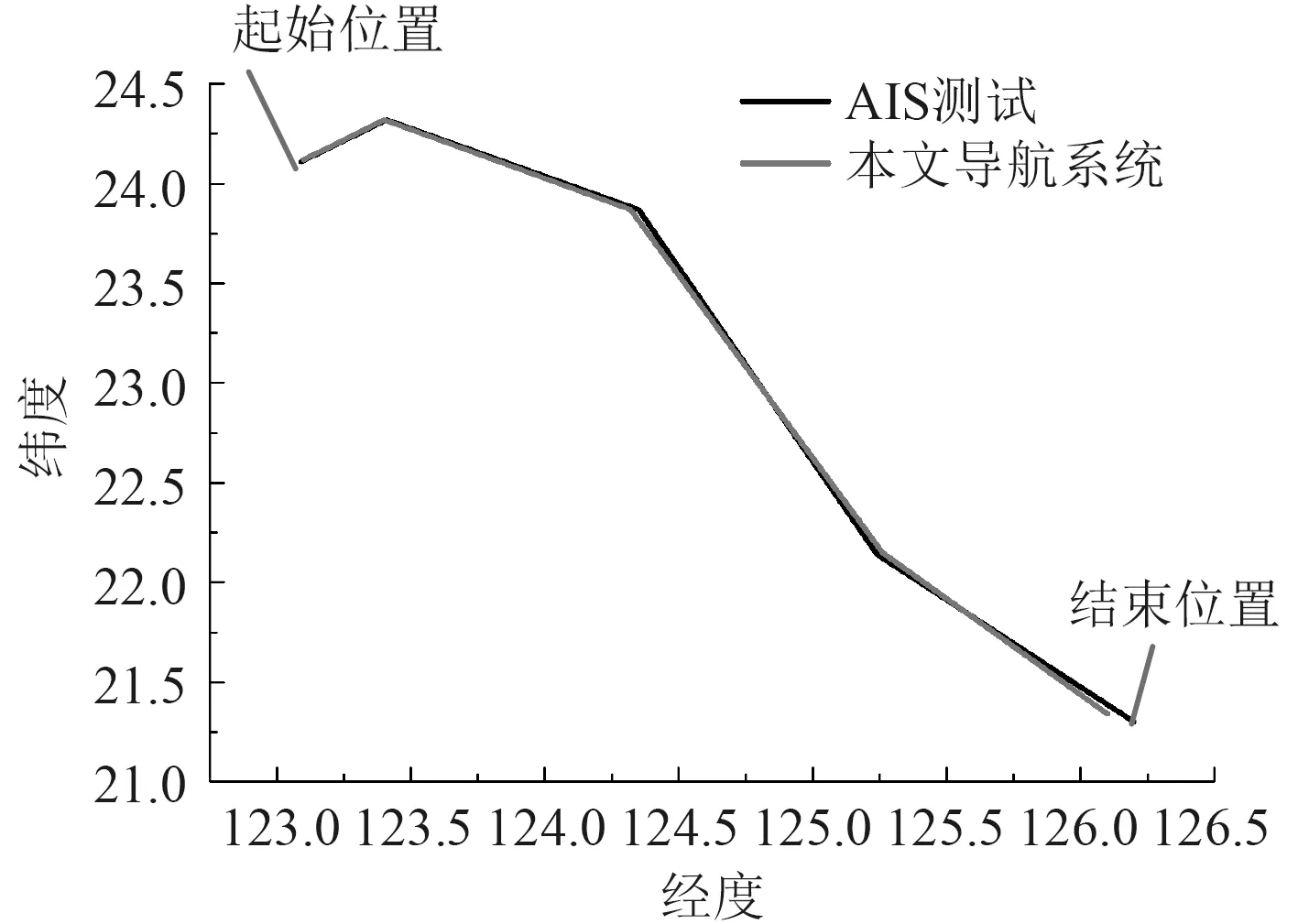
图6 导航系统动态测试轨迹对比Fig.6 Comparison of dynamic test trajectories of navigation systems
3 结 语
物联网技术具有极高的安全性和稳定性,和北斗卫星定位导航技术相结合,可以为舰船提供稳定的导航辅助。本文首先对物联网技术和北斗导航定位技术进行阐述;然后,设计了基于物联网的北斗导航节点,分析了节点中各个模块的基本作用和实现原理;最后,对构建的基于物联网的舰船导航控制系统的抗干扰能力、静态和动态定位进行测试,测试结果表明系统具有良好的抗干扰能力,同时静态和动态定位精度都较高。
