ADAMS虚拟仿真技术在理论力学运动学教学中的应用探讨
2023-09-16刘静
刘静
(上海理工大学机械工程学院 上海 200093)
运动学是研究物体运动规律的科学,主要基于点的合成运动规律和刚体平面运动分析,研究运动机构整体、刚体、刚体上的点的运动规律。传统课堂教学讲解这一部分内容时主要通过分析物体的速度和加速度矢量图、根据速度和加速度合成定理列写、求解运动方程,整个分析求解过程比较抽象、繁琐。如果能在整个机构运动学分析的框架上分析刚体或点的运动,对于学生理解机构运动学会有很大帮助,而且会激发学生继续深入探究机构运动分析的方法、结论的兴趣,有助于加深对运动学知识和研究方法的理解和掌握[1-3]。
虚拟样机仿真分析(Automatic Dynamic Analysis of Mechanical System,ADAMS)软件是目前全球领先的多体系统动力学分析软件[4],具有可视化、易操作、界面友好、功能强大、求解迅速的特点,在工程实际中得到广泛应用。将ADAMS 虚拟仿真技术融入理论力学运动学教学中[5],在运动学知识点的讲解过程中,结合典型的运动学分析案例[6],对系统进行建模和仿真模拟,可快速对系统中的所有构件进行运动学分析。通过对比仿真结果和解析数据结果,双向验证结论正确性,能够帮助学生加深对运动学概念、分析方法和求解步骤的理解。
1 ADMAS虚拟仿真技术在运动学教学中的应用范围
ADAMS 虚拟仿真技术可以全程应用于运动学内容的教学中,主要包括对各种约束类型的认识、点的合成运动和刚体平面运动的分析、机构的运动学分析。
2 应用ADMAS虚拟仿真技术进行运动学分析的步骤
2.1 创建几何模型
在传统课堂教学中,运动学问题一般抽象简化成机构运动示意图表示。结合ADAMS仿真教学时,可以利用ADAMS 零件模型工具或由Pro/E、CATIA、Solidworks 等三维建模软件导入的方法来创建运动学分析对象的三维几何模型。ADAMS 自带的零件模型包括连杆(模拟刚性连杆)、长方体(模拟滑块)、球体(模拟小球)、弹簧阻尼器(模拟弹簧和摩擦)等。
2.2 施加约束
运动学中构件之间的连接,需要在几何模型建立之后,通过添加相应的约束来模拟。运动学部分常见的约束类型有接触表面、柔索、光滑铰链、滚动支座、球铰链、止推轴承、固定端等。利用ADAMS的理想铰链、基本铰链、特殊约束等可以完成对上述约束的模拟。
2.3 添加运动驱动
运动学中的驱动可以利用ADAMS 的MOTION 运动驱动来实现,通过施加运动驱动函数,可以模拟刚体或刚体系统的运动。
2.4 虚拟仿真和后处理
模型创建完成后,利用ADAMS强大的运动学仿真分析与后处理技术,可以快速观看运动仿真过程和计算结果,并且可以针对运动学问题的不同分析要求,建立对应的测量和仿真,并以图线、图表、动画等直观的形式显示。
2.5 仿真结果分析和验证
充分利用仿真后处理得到的仿真图片、曲线、动画等,将理论力学的解析解和仿真结果进行对比,从而将抽象理论具体形象化,便于学生理解和掌握。
3 ADAMS虚拟仿真技术运用于运动学教学案例
3.1 牵连运动是平移运动的运动学分析案例
牵连运动是平移运动时的运动学分析,需要根据绝对运动是牵连运动和相对运动的合成,通过确定动点和动系,绝对运动、相对运动和牵连运动,列写速度合成和加速度合成定理来进行求解。既要画速度和加速度矢量图,又要列写速度和加速度合成定理的解析表达式,求解过程繁琐。通过ADAMS 运动学仿真分析,通过三维模型的直观展示与快速运动仿真,可增加直观性,而不单纯的是数学方程的推导求解和繁琐矢量图的画解,从而激发学生的学习兴趣。
牵连运动是平移运动的运动学分析,以铰链四杆机构为例,如图1(a)所示。O1A=O2B=10 cm,O1O2=AB,杆O1A以匀角速ω=2 rad/s 绕O1轴转动。AB杆上有一套筒C,此筒与CD杆相铰接,机构的各部件都在同一铅垂面内。求当φ=60o时,CD杆的速度与加速度。

图1 牵连运动是平移运动的铰链四杆机构示意图与ADMS仿真模型
首先利用ADMAS 零件建模工具建立三维结构仿真模型,利用约束工具在零件之间添加约束:在O1、O2、A点、B点、滑块与CD杆之间用REVOLUTE JOINT,滑块与AB之间、CD杆与轨道之间用TRANSLATIONAL JOINT,并且在O1轴铰接约束上添加MOTION_ROTATION运动,模拟实际机构的约束和运动情况,如图1(b)所示。
模型建好后运行仿真,并利用POSTPROCESSOR工具,通过测量工具得到CD杆上C点的速度和加速度随机构运动的变化曲线,如图2 所示。在曲线上测量得到当φ=60o时CD杆的速度是10 cm/s,CD杆的加速度是34.6 cm/s2,与通过点的速度合成和加速度合成定理的理论解析解结果相同。
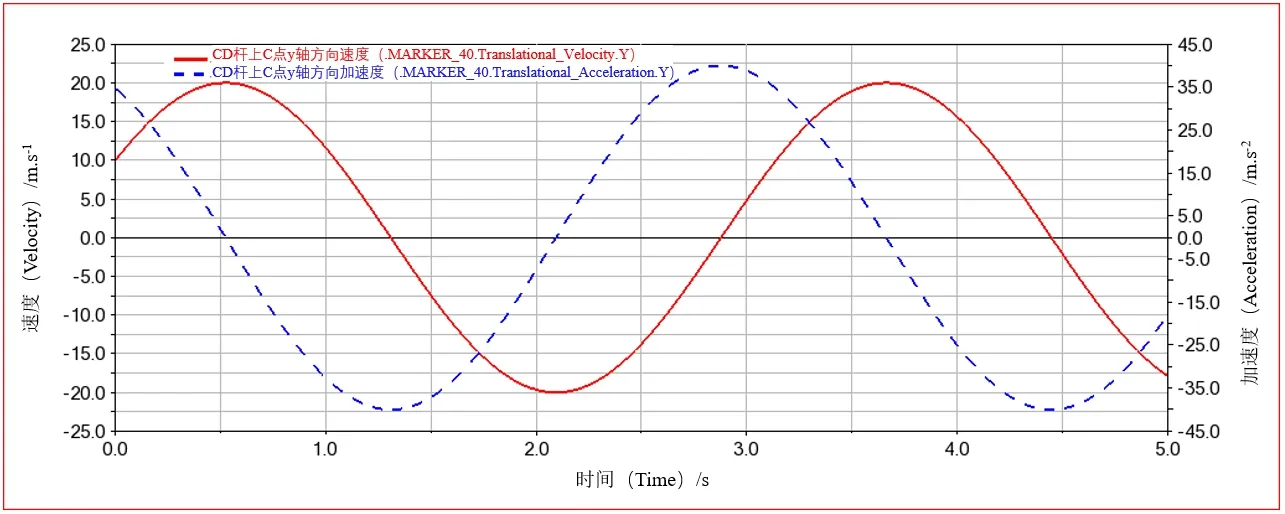
图2 牵连运动是平移运动的铰链四杆机构运动学仿真结果
3.2 牵连运动是定轴转动的运动学分析案例
牵连运动是定轴转动时的运动学分析,因为有附加的科氏加速度,比牵连运动是平移的求解更加繁琐,而且科氏加速度的判断和求解对很多初学者来说难度比较大。通过ADAMS运动学仿真,基于系统内置的运动学求解算法,可以自动进行速度和加速度分析,直观、准确地求解速度和加速度。可以在课堂教学中嵌入ADAMS仿真分析,作为讲解这一部分内容的展示和例证,加深学生对知识点的理解;激发学生的学习兴趣。牵连运动是定轴转动的运动学分析,以图3(a)所示曲柄摇杆机构为例,曲柄长OA=12 cm,以匀角速度ω=2 rad/s 绕O轴转动,通过滑块A 使摇杆O1B绕O1轴摆动;OO1=20 cm,求当φ=0o和φ=90o时,摇杆的角速度和角加速度。
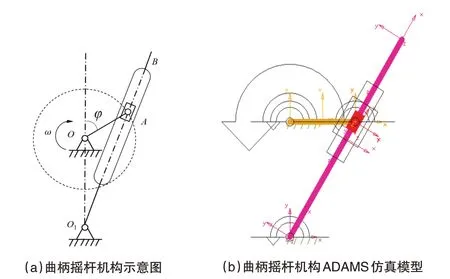
图3 牵连运动是定轴转动的曲柄摇杆机构示意图与ADMS仿真模型
利用ADAMS零件建模工具建立三维仿真模型,利用约束工具在构件之间添加约束:在O点、O1点、滑块与OA之间的连接用REVOLUTE JOINT,滑块与摇杆O1B之间用TRANSLATIONAL JOINT,并且在O1轴铰接约束上添加MOTION_ROTATION 运动,模拟实际机构的约束和运动情况,如图3(b)所示。
模型建好后运行仿真,并利用POSTPROCESSOR工具,通过测量工具得到摇杆O1B的角速度和角加速度随机构运动的变化曲线,如图4 所示。在曲线上测量得到:当φ=0o时,摇杆O1B的角速度是2.63 rad/s,角加速度是0;当φ=90o时,摇杆O1B的角速度是1.86 rad/s,角加速度是10.2 rad/s2。仿真结果与通过点的速度合成和加速度合成定理的理论解析解一致。
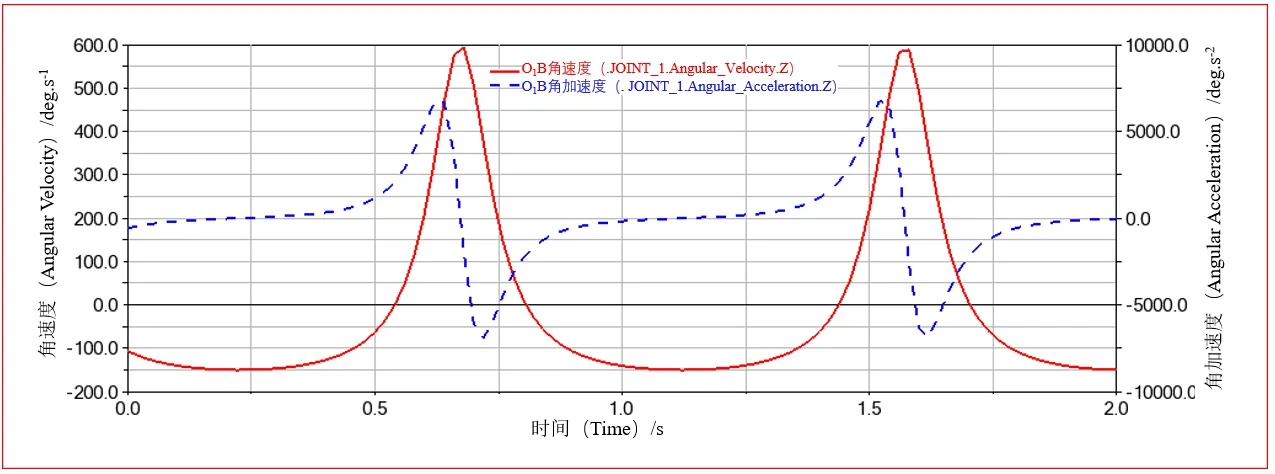
图4 牵连运动是定轴转动的曲柄摇杆机构运动学仿真结果
3.3 四连杆机构平面运动学分析案例
刚体平面运动是工程运动机构中常见而又比较复杂的运动,作为一种复合运动,通常看作是随基点的平移运动和相对于基点的转动的合成,其运动学的分析求解比较抽象。利用ADAMS 建立刚体平面运动机构的三维运动学模型、并进行运动学分析,可直观、快速得到运动机构中刚体或刚体上的点在任意运动时刻的运动学参数值,可以帮学生理解刚体平面运动的运动合成的含义与求解的思路。图5(a)所示的四连杆机构中,曲柄OA=10 cm,以匀角速ωo=2 rad/s 绕O轴转动,连杆AB=40 cm。求在图示位置时摇杆O1B的角速度与角加速度及连杆中点M的加速度。

图5 刚体平面运动四连杆机构示意图与ADMS仿真模型
利用ADAMS零件建模工具建立三维仿真模型,利用约束工具在构件之间添加约束:在O、O1、A 点、B 点的连接用REVOLUTE JOINT建立构件之间的约束并且在O轴铰接约束上添加MOTION_ROTATION匀角速运动,模拟实际机构的约束和运动情况,具体如图5(b)所示。
模型建好后运行仿真,并利用POSTPROCESSOR工具,通过测量工具得到摇杆O1B的角速度和角加速度随机构运动的变化曲线,以及AB杆中点M的加速度曲线,如图6所示。在曲线上测量得到当OA杆和水平面夹角为30o时,摇杆O1B的角速度是0,角加速度是21.65 rad/s2,AB杆中点M的加速度是3.9 m/s2。仿真结果与通过速度瞬心法和基点合成法求得的理论解析解相同。
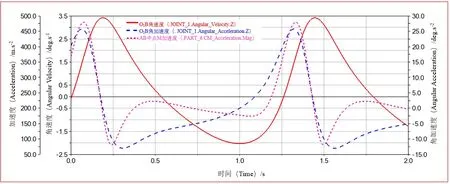
图6 刚体平面运动四连杆机构运动学仿真曲线
4 结语
该文探索了ADAMS 仿真技术在“理论力学”运动学课程教学中的应用。利用ADAMS 的建模工具建立运动学案例的仿真模型,基于ADAMS的运动学分析内核,运行运动学仿真分析,并将仿真结果以动画、曲线等可视化形式演示,使抽象的运动学概念和知识变得直观生动。通过将理论解析解与ADAMS 仿真结果进行对比分析,激发学生的学习兴趣,在丰富课堂教学内容的同时,加深了学生对机构运动学现象和知识点的理解,提高教学质量。
