基于深度神经网络的水下目标识别技术研究
2023-09-16田禹田文峰苏宇辰于新伟王云飞
田禹 田文峰 苏宇辰 于新伟 王云飞
(天津工业大学电子与信息工程学院 天津 300387)
水下目标的分类识别是利用声学或光学手段,对水下物体进行分类或识别,对国防建设和海洋资源开发有重要意义。舰艇辐射噪声是水下目标分类识别的主要信息来源[1],其包括多种噪声源,由宽带连续谱和一系列线谱构成。如何从辐射噪声中获取目标特征信息并进行分类识别,是水下目标分类识别领域的主要研究方向。
传统的水下目标分类识别是由人的听觉完成的,存在很大的局限性,不适应现代信息化的水下作业场景。深度学习(Deep Learning)在计算机视觉、语音识别、自然语言处理等领域取得巨大成功,在很多方面接近或超过了人的智能水平。在这种技术浪潮下,声呐研究人员也将深度学习技术引入水下目标识别领域,取得了丰富的研究成果。
葛召华等人利用Wigner 高阶谱方法提取水下信号的谱特征,用最小二乘支持向量机进行目标识别[2]。王升贵等人通过短时傅里叶变换得到LOFAR谱图,使用深度卷积神经网络进行分类识别[3]。付同强等人使用迁移学习方法进行水下目标识别[4]。李琛等人利用多通道级联特征的深度神经网络解决低信噪比条件下的水下目标识别问题[5]。张牧行等人提出一种水下目标识别的最大信息系数特征选择方法,可以使用更少的特征,提升分类正确率[6]。此外,吴晏辰等人基于MFCC 和GFCC 特征构建卷积神经网络和残差神经网络,建立小样本下的水下目标识别系统[7]。陈凯峰等人设计了基于FPGA和CNN的水下目标识别系统[8]。
本文在前人研究基础上,对水下目标辐射噪声进行建模,生成虚拟样本,辅助真实样本对网络进行训练。分析了水下目标辐射噪声DEMON 谱特征提取方法,生成DEMON 谱样本。设计了深度神经网络对水下目标DEMON 谱进行分类识别,实验数据表明该网络模型能较好地对水下目标进行分类识别,达到预期设计目标。
1 水下目标辐射噪声建模
对水下目标进行分类识别时,由于水下目标样本采集代价大,造成数量和种类稀缺,不满足深度神经网络训练需求。通常情况下,需要对水下目标辐射噪声建模,生成不同种类和参数的样本,辅助真实的样本,对网络模型进行训练和测试。
本文根据水下目标辐射噪声谱的特征,设计的仿真模型如图1所示。
水下目标辐射噪声的建模过程可以表示为
式(1)中:s(t)为目标辐射噪声;vc(t)为空化噪声信号;va(t)为海洋环境噪声信号;ωs为辐射噪声基频;mi为基频的i次谐波分量的调制幅度;θs(t)为i次谐波分量的调制相位;K为谐波次数。
根据该模型,生成5类目标,用于深度神经网络的训练、评估和测试。不同目标的本质区别在于辐射噪声基频ωs是不同的,特征谱线的数量即谐波次数K是不同的。每个谐波的调制幅度mi在0.5~1之间随机分布。通过调整海洋环境噪声va(t)的强度,来改变水下目标辐射噪声的信噪比。
2 水下声信号特征提取
水下目标辐射噪声经过远距离传播,到达声呐接收端时功率非常微弱,完全淹没在环境噪声中。目前,有多种方法可以从环境噪声中提取水下目标辐射噪声特征,如LOFAR谱、DEMON谱、梅尔倒谱系数、高阶统计量等。本文使用DEMON 谱进行水下目标的分类识别,DEMON谱可以提取水下目标辐射噪声的低频线谱和连续谱,包含了舰船螺旋桨的轴频和叶频信息,广泛用于水下目标检测、分类和识别。
水下目标辐射噪声DEMON 谱的提取过程如图2所示。舰船辐射噪声经过多个不同频带的带通滤波器,多通道数据分别进行绝对值检波、低通滤波和降采样处理后,进行傅里叶变换,得到的谱图为多通道的DEMON谱。为了降低深度神经网络的计算量,多通道DEMON谱取最大值,保留一个通道作为最终目标识别的样本。
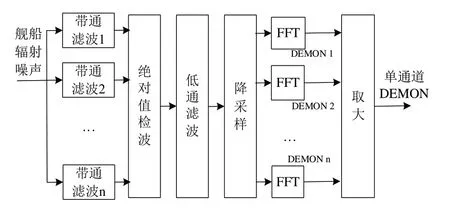
图2 DEMON谱的提取过程
本文傅里叶变换的长度为4 096,取前一半谱线作为DEMON谱的样本,即每个样本的维度为1×2 048。
3 深度神经网络的设计
深度神经网络是一种利用非线性映射函数的方式建立的数学模型,广泛用于机器学习领域。神经网络由大量的神经元构成,解决不同问题时,需要专门进行网络设计和训练,确定各神经元之间的连接关系和权重值。通过大规模的数据训练,实现网络模型的自主学习。
本文设计深度神经网络,并进行训练,实现对5个不同种类的水下目标进行识别,并可对深度神经网络的Dense层的层数、各Dense层的神经单元数等网络结构进行精细筛选调优。网络模型训练时,采用Glorot初始化方式、调整训练批次Batch 大小,损失函数选择交叉熵损失,优化器选用Adam。为了防止神经网络出现过拟合现象,在隐蔽层之间设计Dropout 层,丢弃率设置为0.2,随机减小隐蔽层之间连接。
本文经过优化设计额深度神经网络的结构如图3所示。网络模型除了输入层和输出层外,包含3 个Dense层和一个Dropout层。
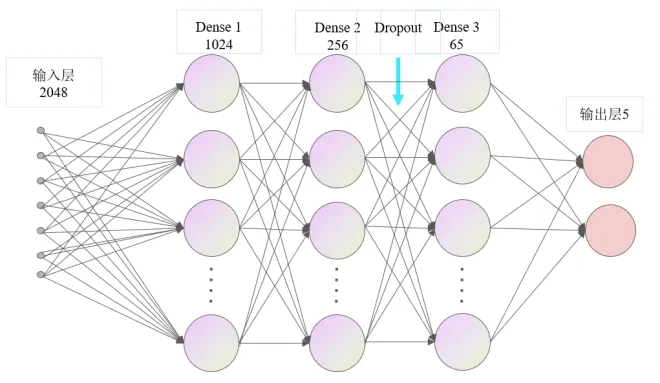
图3 网络模型结构
网络模型参数如表1所示。
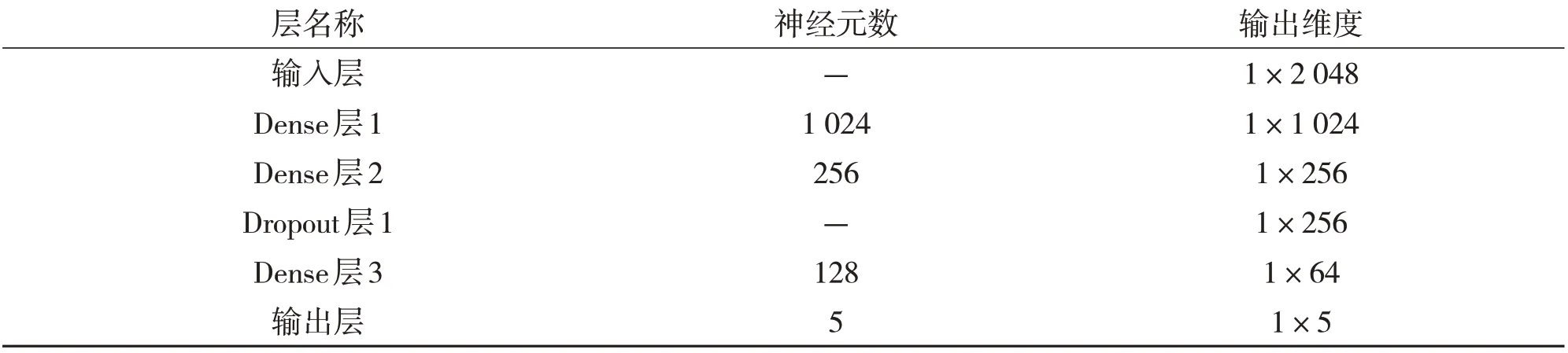
表1 深度神经网络的结构和参数
4 实验与分析
4.1 样本生成
根据式(1)所述的模型,生成不同种类的目标辐射噪声,按照图2 所示的DEMON 谱处理过程,生成目标的样本,任取4个样本,图形如图4所示。
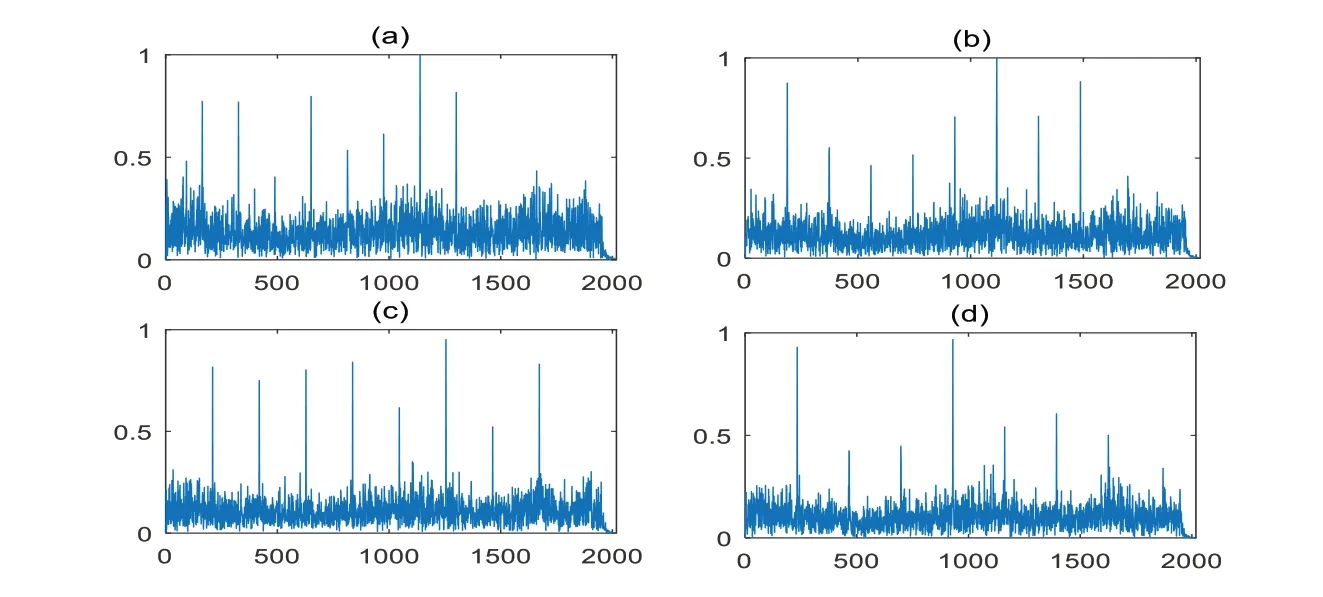
图4 典型目标样本
由图4 中可以看出,不同种类目标的特征谱线有明显差异。
4.2 网络的优化
深度神经网络的设计,需要对多个参数进行筛选优化。本文以Dense层数为例,说明网络优化过程。
深度神经网络对水下目标识别的性能容易受到水下目标运动状态和工作状态影响,如多普勒频偏。评估网络模型性能时,需要重点考察多普勒频偏对网络模型性能的影响。
进行网络模型设计时,研究不同的Dense 层数量时,水下目标辐射噪声多普勒频偏对网络模型性能的影响,结果见图5。图中,横坐标为相对多普勒频偏,纵轴为识别精度,不同的曲线表示不同的Dense层时,识别精度随多普勒频偏的变换。从图5 中可以看出,相对多普勒频偏增大时,识别精度均有不同程度的下降,但是Dense 层为3 层时,识别精度随多普勒频偏增大时下降得最慢。由此可知,Dense 层为3 时,网络模型对水下目标多普勒频偏具有更好的包容性。
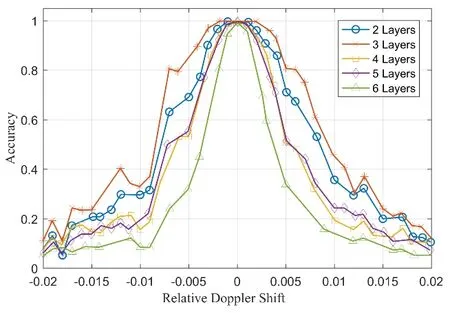
图5 多普勒频偏对网络性能的影响
按照类似的研究方法,本文对网络模型的各个参数进行优化,得到表1所示的优化后的网络模型。
4.3 分类识别结果
测试数据集包含5 类不同种类的目标样本,标记为A~E,每类目标样本数为500,样本的多普勒频偏是随机生成的。使用测试数据集对本文提出的深度神经网络进行性能测试,分类识别结果的混淆矩阵如图6所示。
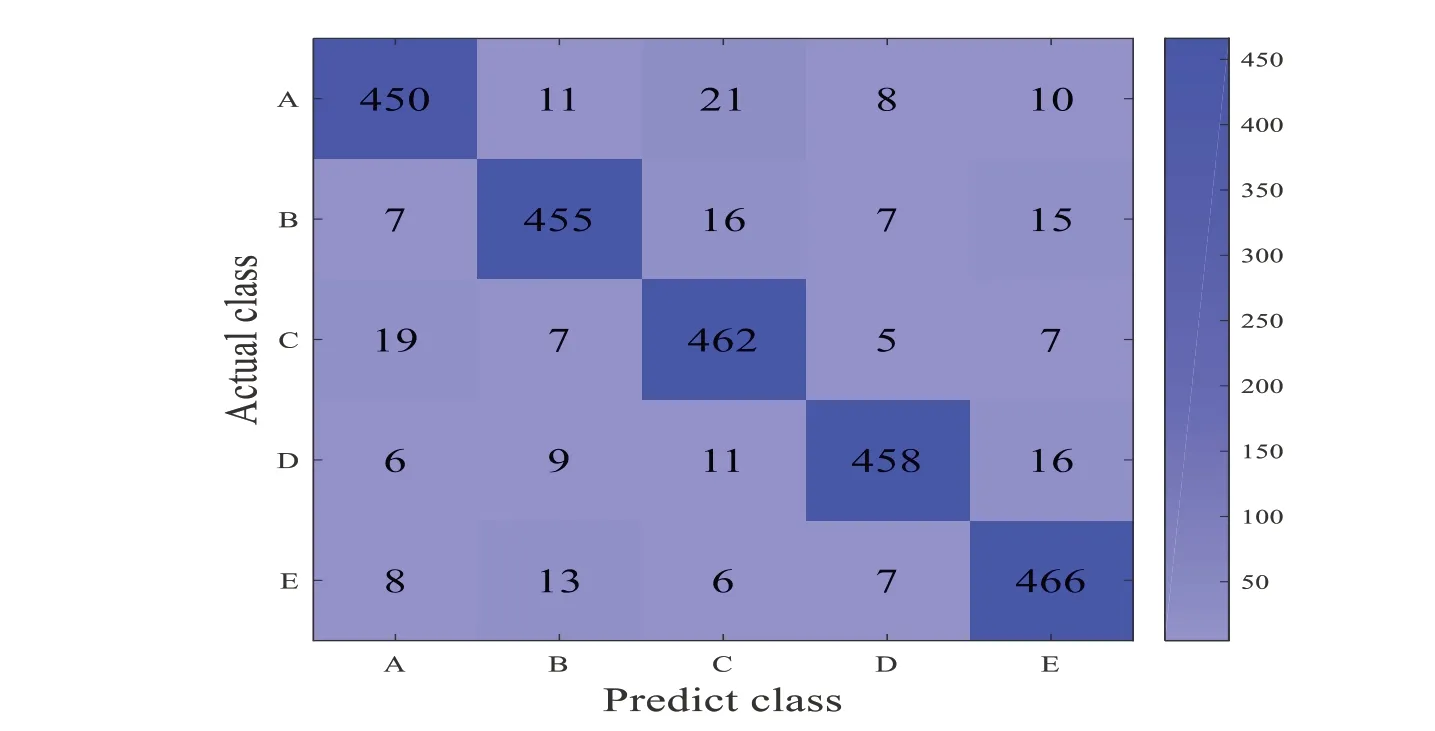
图6 混淆矩阵
由图6 可知,5 类目标最低识别率为90.0%,最高识别率为93.2%,平均识别率为91.6%,达到了预期的研究目标。
5 结语
本文对水下目标辐射噪声建模,生成虚拟目标样本,辅助真实数据,实现对神经网络的训练和测试,并对辐射噪声进行DEMON 谱处理,提取目标特征。设计深度神经网络,给出网络结构和参数,用于水下目标分类识别。实验数据表明:提出的网络模型能够准确地对目标进行分类识别,达到预期效果。研究下一步工作是完善数据集,补充更多的目标样本,对网络模型进行改进,进一步提升分类识别性能。
