利用无人机倾斜摄影点云的建筑单体化提取
2023-09-15吴博文闫佳宇
王 果,陈 超,卢 燕,吴博文,闫佳宇
(1.河南工程学院 土木工程学院,河南 郑州 451191;2.河南理工大学 测绘与国土信息工程学院,河南 焦作 454000)
以三维点云表达的建筑单体化信息是城市快速三维模型构建的基础,在市政管理、城市规划、三维智慧城市建设等诸多领域具有重要的作用[1]。无人机倾斜摄影通过多视角影像密集匹配技术可快速重建出三维实景模型,更好地保持建筑结构[2],并且其数据采集和处理成本远低于机载激光雷达点云[3-4],因此在城市三维建筑重建领域得以广泛应用[5-6]。然而,倾斜摄影重建得到的三维模型是连续三角面片构成的表面模型,难以支撑相应的三维应用开展,故需要对倾斜摄影三维数据进行对象化或单体化操作[7-8]。近年来,如何从倾斜摄影密集匹配点云中获得单体化的建筑点云,已成为城市建筑快速三维模型构建及相关应用开展的关键问题[9]。
在建筑点云提取与单体化方面,国内外学者已开展了大量研究,总体分为如下两类:一是借助其他外部数据,如矢量数据[10]、点云数据[11],进行模型展示层面的单体化;二是利用倾斜摄影密集匹配点云开展建筑提取与单体化,如利用栅格图像计算点云面域之间的拓扑关系得到各建筑单体的点云覆盖范围[9]、利用平面信息进行建筑重建[12]、基于密度聚类分析算法开展建筑物顶点云聚类[13]、引入布料模拟算法进行建筑顶面提取[14]等。然而,由于现实世界中三维场景自身的复杂性,以及得到的密集匹配点云数据不规则且存在冗余,故从倾斜摄影密集匹配点云中进行建筑单体化提取,现阶段仍然是一个十分困难的问题。
本研究提出了一种倾斜摄影点云单体化提取新方法,充分利用丰富的地物竖立面信息,引入投影点密度(density of projected points,DoPP)进行建筑立面的初步识别,然后通过基于八叉树叶节点的连通性聚类(octree-based label connected components,OLCC),达到建筑单体化提取的目的。其主要流程如图1所示。

图1 本研究方法流程Fig.1 Flow chart of the proposed method
1 利用DoPP和OLCC的建筑单体化
1.1 不同空间目标特征分析
本研究主要解决的问题为无人机倾斜摄影所重建的建筑物点云及建筑物周边独立地物点云等主要地表附属目标的分割提取。
密集匹配重建的三维场景包含三维坐标点及RGB值,数据具有不规则性和冗余性,处理起来比较复杂,但利用无人机倾斜摄影重建的三维点云,由于从多个视角获取重建对象,所以具有丰富的立面特征和纹理信息,给地物特征提取提供了一定的条件。
1.1.1独立地物点的空间特征
对于城市场景而言,独立地物主要包括树木、路灯等杆状地物。由于该类地物具有一定的高度和范围特征,所以该类点比周边地形点高,点位水平投影后局部单位面积采样频率高,投影点密度高,如图2所示。
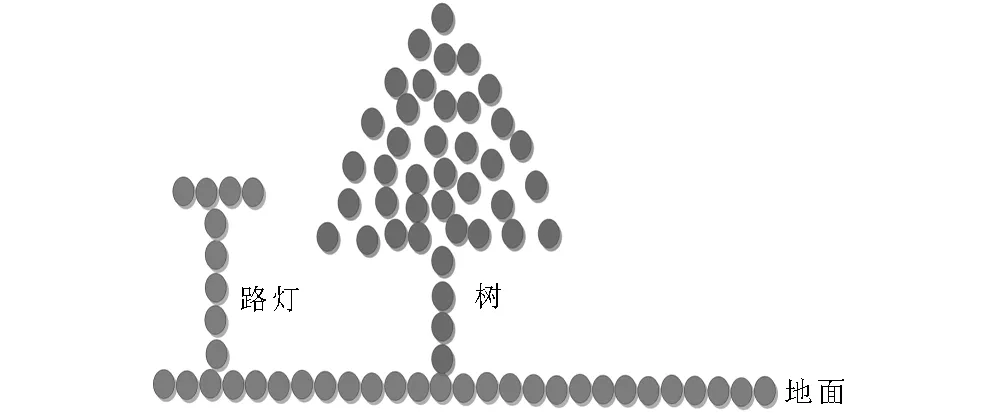
图2 独立地物点的空间特征Fig.2 Spatial characteristics of independent figure points
1.1.2建筑物点的空间特征
通常情况下,建筑物高于周围的地形,具有一定的高差约束且有竖直立面,如图3所示。倾斜摄影重建的三维点云具有丰富的立面信息,建筑立面有大量的三维重建点,建筑物点在水平投影边缘,单位面积具有较高的采样频率,水平投影密度大。
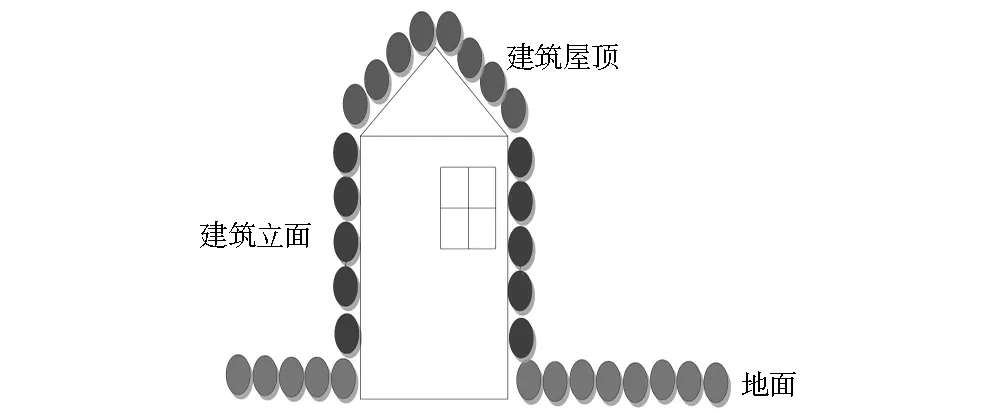
图3 建筑物点的空间特征Fig.3 Spatial characteristics of building pointss
1.2 DoPP理论与方法
根据无人机倾斜摄影重建点云的空间特征分析,采用史文中等[15]提出的DoPP概念,将无人机倾斜摄影重建的三维点云数据直接投影到水平面上,如公式(1)所示:
(1)
统计投影后在水平面内任意位置包含的投影点个数,用DoPP表示。在重建目标表面光滑、没有遮挡,重建出的所有采样点均为有效点的理想情况下,DoPP值与目标的立面点数量有关。为简化计算,将测量区域划分成规则的格网,对划分的格网统一编号,统计每一个单元格网内的立面点数,作为该单元格网的DoPP值,从而达到对DoPP值的离散化表示。DoPP值具有以下特征:平坦地面上的DoPP值均匀且较小;由于倾斜摄影三维点云数据具有丰富的建筑立面特征,所以建筑边界区域DoPP值远大于其他区域,并具有一定的连通性;建筑物内部的DoPP值为0;独立杆状地物如路灯灯柱,DoPP值局部较大、周围较小;块状地物如汽车和树等,DoPP值局部较大且占据一定面积,如果增加格网尺寸到一定值,块状地物与独立杆状地物具有相同的特征;建筑物顶面和地面的DoPP类似,但通常大于地面点的高程。根据以上特征,选择合理的阈值T1、T2,便可按照如下规则对三维场景进行分割:对于每个单元格网来说,如果DoPP值大于T1,则将该单元格网内的点分类为建筑物点;如果DoPP值小于T2,则将该单元格网内的点分类为地面点;否则分类为其他点。其中,T1、T2可根据实际情况进行确定,分割后可获得不同类型的点云,利用倾斜摄影点云建筑物丰富的立面特征,以及建筑立面在水平面上的投影点密度大这一特性,进行建筑物轮廓的提取,进一步结合高程方向值即可重建建筑立面特征。
1.3 OLCC算法
用DoPP算法进行建筑物识别后,为区分单个建筑,引入OLCC算法,对识别出的建筑立面点云数据进行单个建筑提取。具体过程:首先利用识别出的建筑立面点云数据构建立方体包围盒作为根节点,将初始构建的根节点分裂为8个具有相同体积的子节点,然后不断进行递归分裂,达到预先设定的八叉树级别和每个叶子节点包含最少点数阈值时分裂停止,最后通过OLCC算法实现建筑点云单体化提取。
2 实验及结果分析
2.1 实验
为验证本研究方法的有效性,选取河南工程学院西校区部分校园进行实验。实验区内地势较为平坦,主要包含6栋教学建筑及附属的2层阶梯教室,利用无人机倾斜摄影进行实验区数据外业航飞采集,实验区倾斜摄影点云数据如图4所示。
图4 实验区倾斜摄影点云数据Fig.4 Point cloud data of oblique photography in the experimental area
2.2 结果及分析
利用CloudCompare软件对密集匹配过程中产生的粗差进行剔除,之后按照0.1 m × 0.1 m的格网尺寸对实验区构网,将密集匹配重建出的实验区所有点投影到格网中,并计算每个格网单元的DoPP值,设置DoPP阈值T1为200,对原始密集匹配点云进行分割。基于DoPP算法的建筑立面点云识别结果如图5所示。

图5 基于DoPP算法的建筑立面点云识别结果Fig.5 Recognition result of building point cloud based on DoPP algorithm
从图5可以看出,虽然识别出的建筑点云包含部分离散的独立地物点,但实验区内的建筑立面点云被成功识别。对识别出的建筑点云依据OLCC算法,设置八叉树的级别为8,子节点最小点数为1 000,共得到7个聚类分割结果,如图6所示。其中,不同深浅代表提取出的不同建筑物。从提取结果可以看出,本研究所提方法可以有效提取实验区内的主要建筑物,且具有参数少、自动化程度高的特点。分析原因如下:1)从原始密集匹配得到的三维点云入手,可避免数据内插带来的数据和精度损失;2)充分利用了建筑立面包含丰富的数据信息这一特征;3)使用了DoPP、OLCC等成熟算法,提高了建筑点云提取的稳健性。同时,由于倾斜摄影测量密集匹配点云数据遮挡问题,所以存在数据缺失现象,导致提取的建筑存在过分割现象,如图6(a)和(b)中黑色方框区域所示。
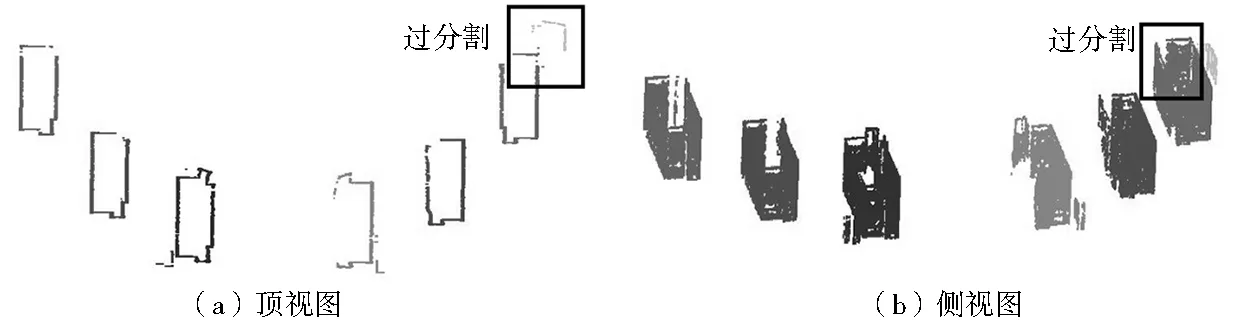
图6 基于OLCC算法的建筑立面点云识别结果Fig.6 Recognition result of building point cloud based on OLCC algorithm
3 结语
本研究提出了一种基于投影点密度和八叉树叶节点连通性聚类的倾斜摄影点云建筑单体化提取方法,充分利用密集匹配点云建筑物丰富的立面特征,以及设定的投影点密度阈值和八叉树叶节点聚类算法,进行建筑点云的单体化提取,并通过实测验证了所提方法的有效性。该方法所需参数少、自动化程度高,是基于密集匹配点云数据的建筑物点云单体化提取新方法。
