电力机车应急供电装置网侧检测系统研究
2023-09-11汤礼凤张全柱李嘉政张腾召徐海超
汤礼凤,张全柱,李嘉政,张腾召,徐海超
(华北科技学院 信息与控制技术研究所,北京 东燕郊 065201)
0 引言
随着电力技术的不断发展,电力机车的功率和速度也随之提高,不仅能够满足运输需求,而且还能保证行车的安全与舒适,现如今电力机车已成为机车运输领域主力军之一[1, 2]。但是在机车运行至无电区或者在入库检修等工况下[3],机车接触网无电无法为电力机车辅助供电系统提供电力能源[4, 5],故需要研发机车应急供电装置为其提供应急电源[6]。又由于不同型号的机车上的辅助负载以及不同供电情况对电压频率的需求不同[7, 8],因此研究的应急供电装置需要根据搭载在辅助电网上的负载需求自适应调节输出电压的幅值和频率,且装置中逆变器的控制算法也需要检测逆变器输出到网侧的电压值。而软件锁相环不仅可以实现三相电压的频率跟踪和锁定相位角,还能计算交流电压的有效值。电力机车应急供电装置网侧检测系统使用软件锁相环作为其核心算法。
国内外许多学者针对软件锁相环展开了研究[9-15],目前在广泛应用的三相软件锁相环主要有以下几种:一是采用模拟电路检测电网电压过零点求得相位差信号[9],然后通过算法程序来实现锁相。此方法存在诸如调整时间长、抗干扰能力弱等缺点;二是基于双同步坐标系的卸耦软件锁相环[14],采用基于正负序的双同步坐标系结构,实现正负序的卸耦,从而实现对三相不平衡电网电压的锁相。该方法最适宜用于电网不平衡下的电网电压锁相,但在电网平衡时锁相缺乏一定精度;三是双二阶广义积分器的软件锁相环[15],该方法基于二阶广义积分器的自适应滤波器来实现三相电网电压正负序分量的检测计算,对电网电压的谐波分量进行了滤除,能在电网平衡与不平衡条件下都能准确锁相,但是算法较为复杂,对程序的高效性有一点影响;四是单同步坐标系软件锁相环[14],利用估计出的相位角信息对实际三相的电网电压进行坐标旋转变换得到电压无功分量,对它进行PI调节使其为0,实现三相锁相。此方法能有效抑制输入信号中的噪声,提高锁相环计算精度和可靠性,且算法具有稳定、高效的优势。针对机车应急供电装置中逆变器模块要精准检测电网频率、电压的需求,故本文设计的应急供电装置网侧检测系统选择第四种锁相环算法作为其核心算法。
本文首先介绍了单同步坐标系软件锁相环算法原理,设计了应用于应急供电装置的网侧检测系统总体控制方案,描述了有关锁相环的采样电路设计及软件锁相环算法程序设计,基于DSP芯片实现了单同步坐标系软件锁相环精准检测电压相位、频率及有效值的功能。依托单片机的优秀计算能力,使得在一个电网频率周期内可以通过CPU完成多轮计算的调节,由此得到的电压相位与频率精度高、延时性小。最后通过实验进行测试,证明采用单同步坐标系软件锁相环算法设计的应急供电装置网侧检测系统满足实际应用需求,且响应速度快,具有应用可行性。
1 单同步坐标系软件锁相环算法原理
单同步坐标系软件锁相环算法结构图如图1所示,将三相相电压进行Clark(abc/αβ)变换和Park(αβ/dq)变换,使三相静止abc坐标系下的电压正弦量变换成两相同步旋转dq坐标系下的电压直流量。根据锁相环的需求,使Vpll和V实现完全重合即θ0=θ1,便能实现锁相[14, 15]。
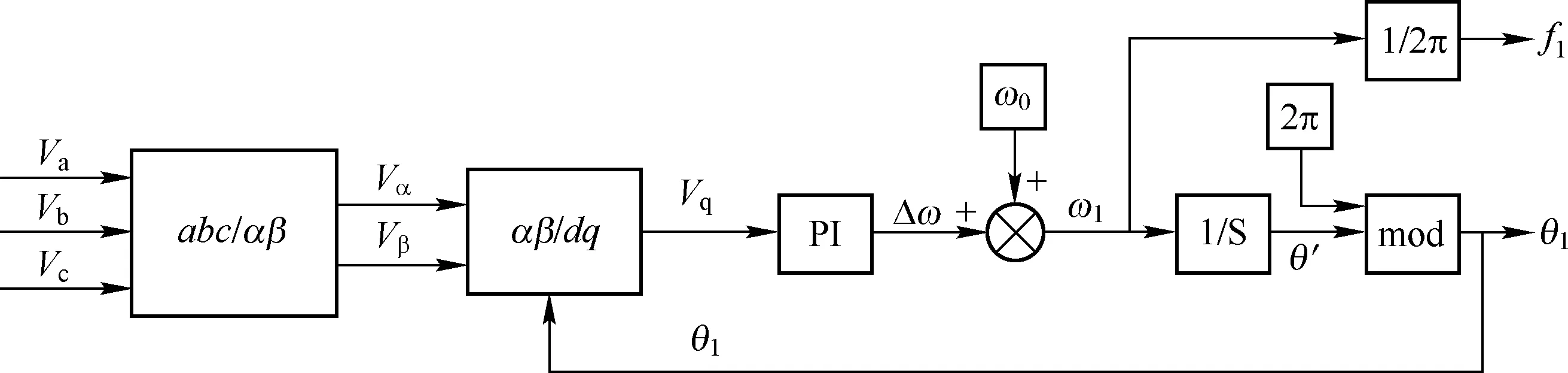
图1 单同步坐标系软件锁相环算法结构图
当电网电压平衡时,电网电压在两相静止αβ坐标系与同步旋转dq坐标系中的实际电压矢量和锁相环输出的电压矢量位置如图2所示。当软件锁相环实现精准锁相时,Vpll和V实现完全重合,即θ0=θ1,此时Vq=0。在锁相环调整过程中电压相位会有突变,使Vpll和V产生偏差,此时使用PI调节器的闭环控制对Vq进行调整,调节至Vq=0,即θ0=θ1,便能确保软件锁相环的输出依旧准确[16]。

图2 SSRF-SPLL矢量图
图1中,abc/αβ是三相静止abc坐标系到两相静止αβ坐标系的变换,即Clark变换;αβ/dq是两相静止αβ坐标系到同步旋转坐标系dq的变换,即Park变换;1/S积分环节是对角速度进行积分运算;mod是对相位角θ′的周期取2π的模运算。Va、Vb、Vc是三相电网电压瞬时值,ω0是被检测电压的额定角频率,ω′是Vpll输出的旋转角频率。
在图2中,V为实际牵引变流器电压矢量;Vpll为软件锁相环输出的电压矢量;θ0为实际牵引变流器电压矢量的矢量角度;θ1为软件锁相环输出电压矢量角度。
电网电压在三相静止abc坐标系可表示为:
(1)
式(1)中,V为电网电压的有效值;ω0为电网电压角频率。
将电网电压从三相静止abc坐标系变换到两相静止αβ坐标系,再变换到同步旋转dq坐标系。经过PI调节器计算及相位限幅,即可得到电压的相位与频率。此过程可以分为以下四步[16, 17]:
(1)首先将三相交流线电压经Clark变换,由三相静止abc坐标系变换到两相静止αβ坐标系,Clark变换公式为:
(2)
式(2)中,θ0为实际牵引变流器电压矢量的矢量角。
(2)再将经Park变换,由二相静止αβ坐标系变换到二相同步旋转dq坐标系,得到电压的直流分量。Park变换公式为:
(3)
式(3)中,θ1为软件锁相环输出电压矢量角度。
(3)将Park变换计算得到的Vq作为PI调节器的输入,并将PI调节器的给定值设置为0,误差经PI调节器计算得到锁相环输出的角速度ω1,再将ω1经过公式(6)计算得到电压频率f1。
PI调节器的给定值与实际输入值之间的误差计算公式为
err(k)=Vq-0
(4)
式(4)中,err(k)是第k次输入PI调节器的误差值大小。
PI调节算法公式为
ω1=Y(k)=Y(k-1)+Kp[err(k-1)]+tKierr(k-1)
(5)
式(5)中,Y(k)是第k次PI调节器的计算结果;Y(k-1)是第k-1次的PI调节器的计算结果;t是时间积分常数;ω1是锁相环计算输出的角速度;Ki是积分比例常数。
f1=ω1/2π
(6)
式(6)中,f1是锁相环计算输出的电压频率。
(4)锁相环计算输出的角速度ω1进行积分,即可计算出电压相位角度,再将相位角度对2π进行求模运算后,得到锁相环输出的相位角度θ1,积分计算公式为公式(7),求模运算的公式为
S(k)=S(k-1)+tKiω1
(7)
式(7)中,S(k)是第k次积分的计算结果;S(k-1)是第k-1次积分的计算结果。
θ1=S(k)mod(2π)
(8)
式(8)中,θ1是锁相环输出的相位角度。
2 应急供电装置网侧检测系统设计
应急供电装置网侧检测系统总设计框图如图3 所示,应急供电装置网侧检测系统是基于TI公司发行的DSP高速计算芯片TMS320F28335实现的对电网频率、电压的检测,由电压采样模块和软件锁相环控制算法两部分组成。电压采样模块是对机车辅助电网上的三相交流电压瞬时值进行检测,软件锁相环控制算法则是使用单同步坐标系软件锁相环计算三相电压的频率、相位及有效值。将锁相环的计算结果都提供给装置中逆变器的控制算法,频率用逆变器控制算法的频率设定,交流电压有效值用于逆变器算法控制SVPWM波输出时的反馈闭环控制。使得装置的供电输出能自适应机车辅助负载需求进行调频调压输出。
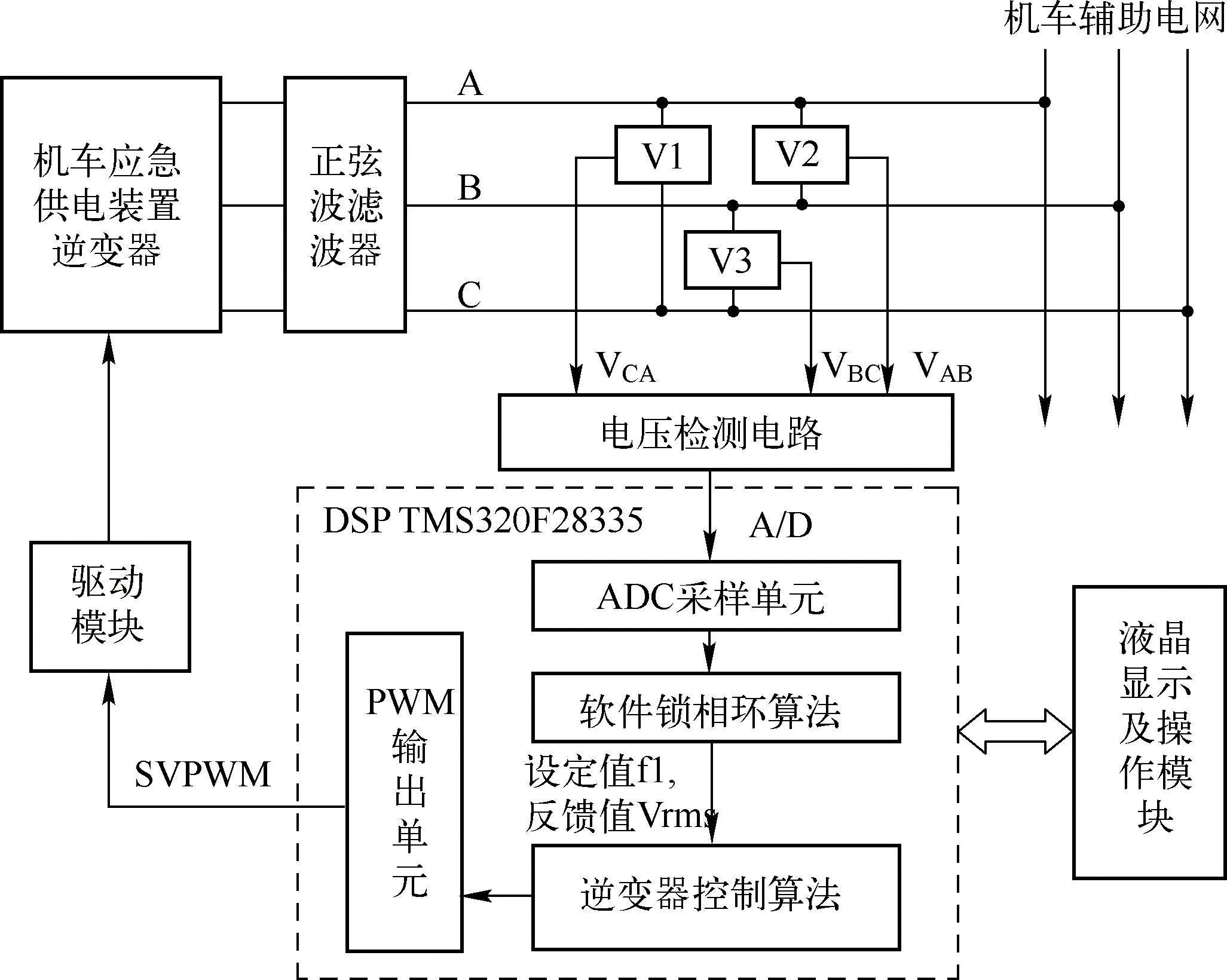
图3 应急供电装置网侧检测系统总设计框图
2.1 电压采样硬件设计
网侧检测系统首先需要检测机车辅助电网上三相交流电压,电压采样模块由三组电压传感器和电压采样电路组成。应急供电装置网侧检测系统中用到的电压采样电路原理图如图4所示。电压传感器选用闭环型霍尔电压传感器,测量范围在±600V,原边额定输入电压400V时副边额定输出电流为25mA。经过采样电阻将传感器传输来的电流信号转变为电压信号,采样电阻大小选取50Ω。通过差分放大电路进行运放,运算放大器的放大比例是1∶1,接着是一个3V的电压偏置使电压拉高至1.5~3V,最后对电压进行限幅后送入输单片机DSP TMS320F28335的ADC采样单元完成电压采样。经过钳位二极管将电压限制在0~3V的范围很好的保护CPU不被尖峰脉冲或者超范围检测电压烧坏。
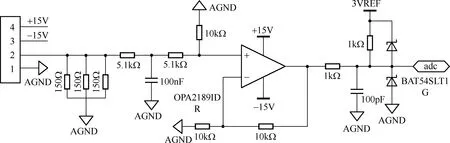
图4 应急供电装置中的电压采样电路原理图
2.2 网侧检测系统中单同步坐标系软件锁相环算法的设计
网侧检测系统中单同步坐标系软件锁相环算法的控制结构图如图5所示。由于采样模块对电网电压VAB、VBC、VCA进行电压采样,采集到是三相线电压瞬时值,首先要将线电压换算为相电压,在三相静止abc坐标系下,将三相线电压转换为三相线电压计算公式为:

图5 网侧检测系统中单同步坐标系软件锁相环算法的控制结构图
(9)
对三相相电压经过公式(2)进行Clark(abc/αβ)变换,计算得到的Vα、Vβ用来计算交流电压的有效值,电压有效值计算[16]如公式(10)所示:
(10)
接着经过公式(3)进行Park(αβ/dq)变换,将计算得到的直流分量Vq,输入PI调节器,经过公式(5)的调节计算,使其无功分量Vq调节至等于0。此时得到锁相环输出角频率ω1,ω1经公式(6)计算可得到电网电压的频率,ω1经公式(7)积分计算即可得到锁相输出的电网电压的相位角度θ1,对积分结果经公式(8)进行限幅处理,使计算的相位角在0~2π间。此时估计的相位角就等于实际的相位角[14]。完成计算后锁相环测得的相位和频率与电网侧相等,使用计算结果来控制逆变器算法,从而达到机车应急供电装置供电的变频变压输出控制。
2.3 软件设计
机车应急供电装置网侧检测系统中的软件锁相环算法程序设计流程图如图6所示。首先使用DSP的ADC模块单元对交流三相电线电压VAB、VBC、VCA进行电压采样。采样结果经过线电压转相电压计算换算为相电压。再将相电压经过Clark变换和Park变换,转换到两相同步旋转dq坐标系,得到电压直流量Vq,使其进行PI调节得到角频率,角频率积分限幅后输出到锁相环的相位角度计算结果,再将计算得到的相位角度反馈回供Park计算使用,完成PI调节器的闭环控制。最后函数结束输出,并返回计算结果ω1、f1、V有效值。逆变器控制算法使用软件锁相环计算返回的数据完成变压变频控制。
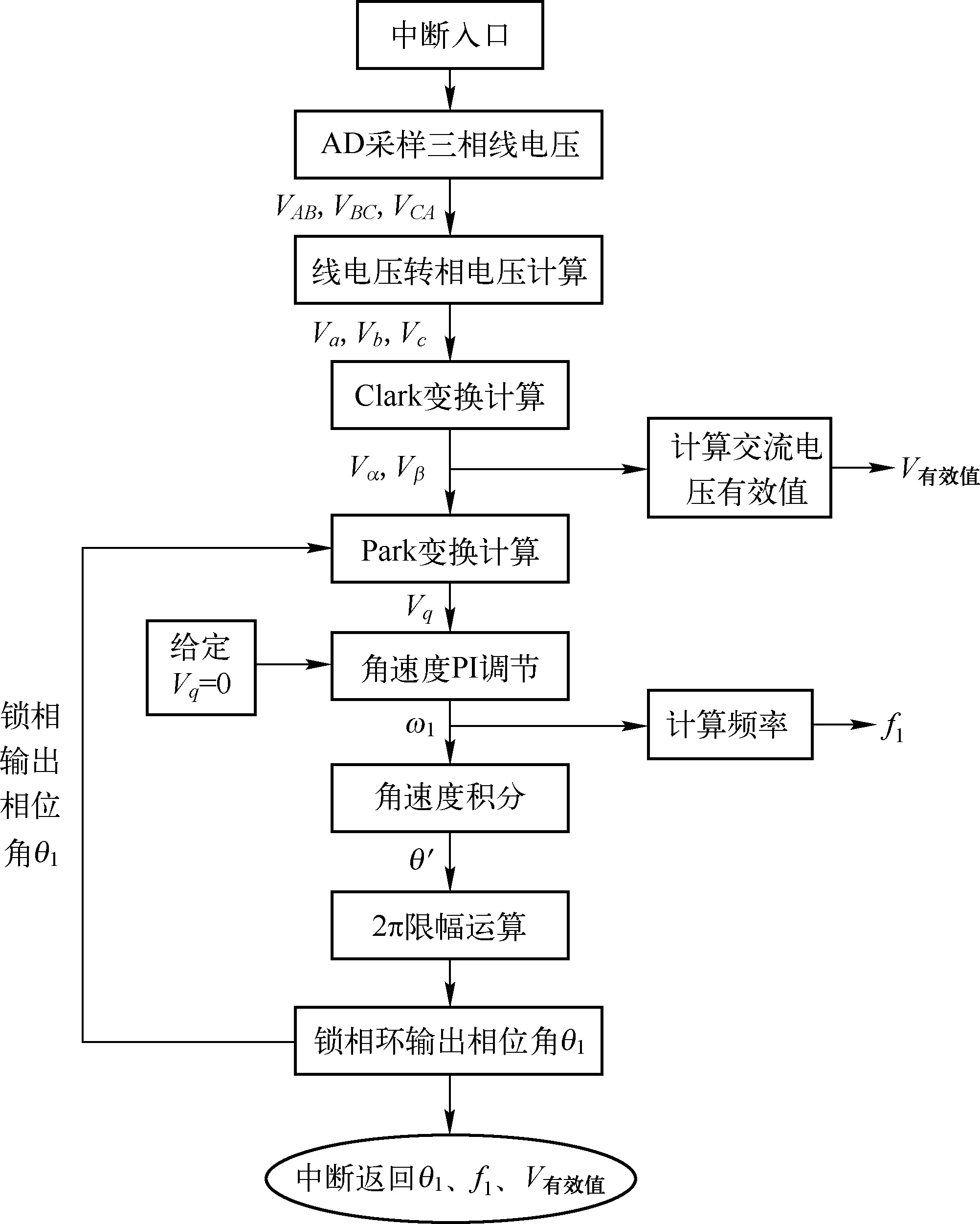
图6 软件锁相环程序流程图
3 实验平台搭建与测试结果分析
为了测试网侧检测系统的准确性与可靠性,在实验室搭建了实验平台如图7所示。实验平台由机车应急供电装置中75kW的逆变器模块、小功率的正弦波输出滤波器、交流电压检测系统、上位机监控操作触摸屏、供电电源、笔记本电脑软件示波器等部分组成。
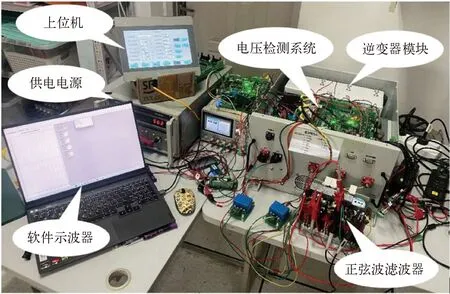
图7 机车应急供电装置网侧检测系统实验平台
测试过程中,由稳压电源给逆变器供稳定的DC 580V,逆变器的三相输出端U、V、W连接正弦波滤波器,经过正弦波滤波器后接入三相电网R、S、T,将电压传感器并联在滤波器输出的RS、ST两相用来检测电网的交流电压瞬时值,并将测量的信号传入逆变器模块。经过网侧检测系统的算法计算可得到电网电压的有效值、角速度、相位以及频率。将网侧检测系统计算得出的电网频率值作为逆变器输出频率的给定值。断开电网,逆变器开始运行,此时使用网侧检测系统测量到的交流电频率值作为逆变器的输出电压频率值,以实际检测的逆变器三相电压有效值作为反馈值,从而实现逆变器的输出电压的闭环控制,能够实现稳定正常运行,反映了网侧检测系统的有效性。通过逆变器模块通讯连接的软件示波器对系统测得的网侧电压数据波形进行实时显示,并对数据波形进行分析。
测试网侧检测系统中软件锁相环算法各个环节的数据输出结果波形如图8所示,图8(a)测量的波形中通道1、2、3、4分别表示的是VAB线电压、VBC线电压的实际波形以及计算后的Va相电压和Vb相电压波形,相电压与各自实际线电压之间互差30°与实际电网相线电压一致;图8(b)测量的波形中通道1、2、3分别是锁相环计算输出的电压角速度、频率、及相位角度,图中显示的值为瞬时值,角速度、频率的值扩大了10倍,实际值分别为313.4rad/s、49.9Hz,相位角的值扩大了100倍,实际值在0~2π之间周期性变化;图8(c)中通道1测量的是网侧电压有效值,大小为392V。
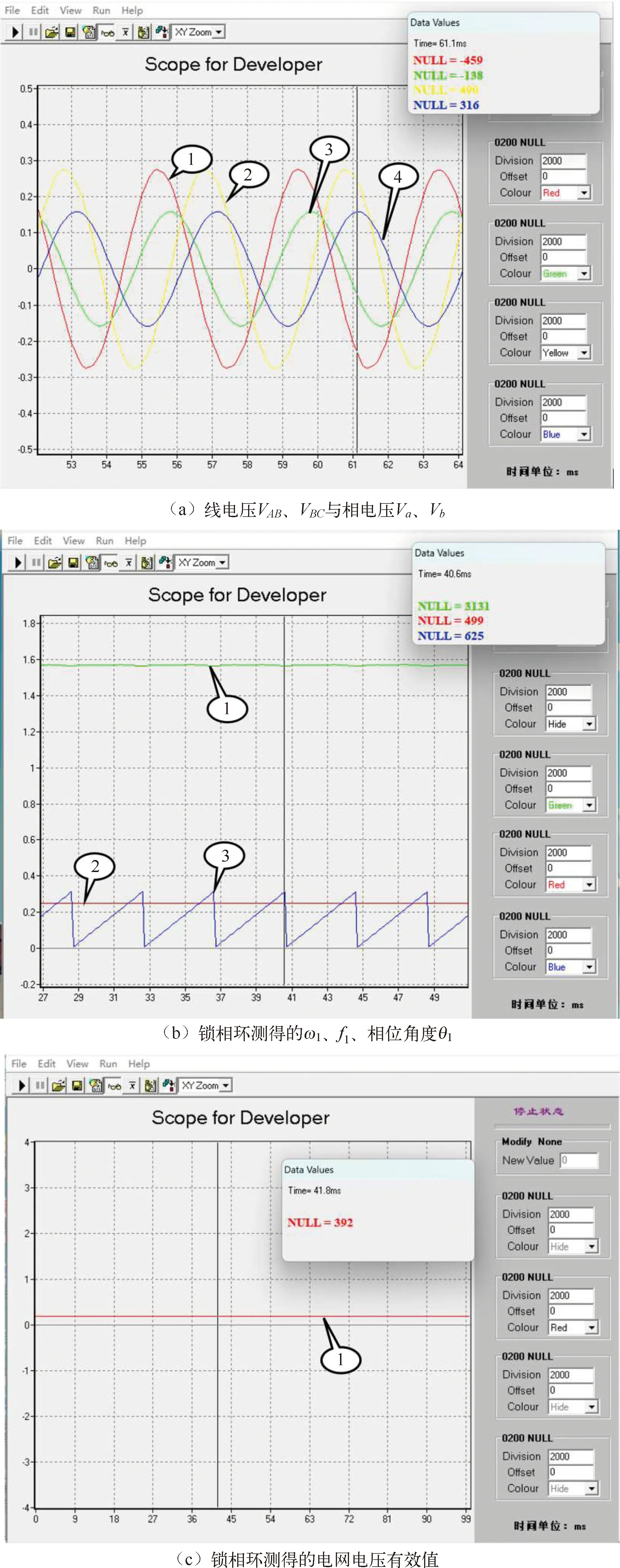
图8 软件锁相环测试结果波形图
通过实验波形能够看出本次设计的网侧检测系统测得的相位、频率、交流电压有效值精度较高与理论值接近,锁相误差小。网侧检测系统计算输出的结果能保证逆变器能正常稳定的运行,实现了机车应急供电装置的自适应变频变压输出,符合机车应急供电装置应用需求。
4 结论
(1) 本文研究分析了机车应急供电装置中网侧检测系统的应用需求与工作原理。设计了应用于应急供电装置的网侧检测系统总体控制方案,并完成了网侧检测系统的软硬件设计。
(2) 通过搭建基于DSP TMS320F28335芯片控制的实物测试平台进行验证,检测分析了软件锁相环算法各环节的数据波形。实验结果表明本次设计的网侧检测系统能够快速准确地跟踪电网电压频率、相位及有效值,满足了机车应急供电装置自适应调频调压控制的需求。
(3) 本文所研究的机车应急供电装置网侧检测系统,弥补了机车应急供电装置无法在不同类型机车上自适应使用的不足,进一步完善了电力机车应急供电装置在不同情景下的应用,为网侧电压检测提供了一种新的选择。
