基于改进转子转速和桨距角协调控制的变速风电机组一次调频策略
2023-09-11彭海涛董新胜徐立军
彭海涛,何 山,2,袁 至,2,陈 洁,2,董新胜,徐立军
(1.新疆大学 电气工程学院,新疆 乌鲁木齐 830017;2.可再生能源发电与并网控制教育部工程研究中心,新疆 乌鲁木齐 830017;3.国网新疆电力有限公司电力科学研究院,新疆 乌鲁木齐 830011;4.新疆工程学院 新疆煤矿机电工程技术研究中心,新疆 乌鲁木齐 830023)
0 引言
随着风电渗透率的不断升高,电力系统频率稳定面临极大挑战[1-2]。一方面,与传统同步机组相比,变速风电机组通过电力电子装置接入电网[3],提供更低的惯性,高渗透率风电接入电网会弱化系统的等效惯性并降低系统一次、二次调频能力;另一方面,风电出力的随机波动增加了功率不平衡事件的发生,系统频率特性进一步恶化,尤其是大规模、集中式风电接入弱送端电网下的频率稳定问题凸显[4-5]。因此,对风电进行必要的控制,使其参与系统频率调节就显得不可或缺。
目前,针对变速风电机组参与电网频率控制的研究主要从惯性控制、储能控制以及减载控制3 个方面展开。惯性控制能够模拟传统同步机组的惯性响应能力,阻尼系统频率过快变化,机组以最大功率点跟踪模式运行,释放旋转动能提供短时功率支撑,提高系统惯性响应能力。文献[6]提出了一种综合频率调节方案,有效地改善频率支撑不足问题。该控制方案建立了转子旋转动能和系统频率间的耦合关系,但只能提供短时功率支撑,无法预留足够的功率备用参与系统一次频率调节,且风电机组退出调频后,可能导致系统频率二次跌落[7]。储能系统具有响应快速、控制灵活等特点,在风电机组或风电场配置一定容量的储能[8],可弥补高渗透率风电接入带来的功率不平衡问题。文献[9]提出了一种基于储能技术的风电场虚拟惯量补偿策略,避免了频率二次跌落现象发生。文献[10]提出在风电机组直流母线上并联超级电容储能装置,提高系统的惯量支撑和一次调频能力。上述方案可以较好地辅助风电参与系统频率调节,但需要综合考虑风电机组运行工况、储能装置荷电状态等因素,计算过程较为复杂,且受制于储能装置高成本的限制。
变速风电机组可以通过减载控制预留功率裕度以协助目标频率恢复,其控制方法主要包括转子转速控制、桨距角控制、协调控制等。文献[11]设计了一种等效转子转速减载曲线,改善系统频率响应特性。文献[12-13]提出转子转速与变桨相结合的减载控制策略,引入风电机组静调差系数参与系统频率调节。在此基础上,文献[14]提出一种变系数控制策略,减小风速波动和负荷扰动对虚拟惯性环节的影响。尽管上述控制方案能提供持续的功率支撑,但转子减速引起的频率响应衰减意味着风电机组无法实现预期的功频静特性,机组稳态频率响应为非线性,且难以预测,可能导致系统中多台发电机组出力分配不均。针对此不足,文献[15]引入桨距角静调差系数,使风电机组一次调频具有线性频率下垂响应特性,但由于变桨执行机构为机械部件,提升有功出力的响应速度相对缓慢,频繁的桨距角调节不可避免地增加了机组疲劳载荷,缩短使用寿命。
综上所述,目前变速风电机组减载控制研究多侧重于调整控制系数以提高频率调节能力,使机组尽最大可能参与调频,优化系统频率扰动极值,但忽略了功率跟踪方法对频率响应的影响,极少考虑满足系统频率稳定性要求的一次调频控制方案。针对以上问题与不足,本文在分析不同功率跟踪方法对频率响应影响的基础上,提出一种改进转子转速和桨距角协调控制的一次调频策略,为风电机组预留功率裕度和实现系统调频需求提供解决方案,当转子转速控制无法满足功率裕度需求时,引入桨距角调差系数,充分利用转子转速控制的优越性,降低机组疲劳载荷,使其具备与传统同步机组相似的功频静特性,提高其参与系统频率调节服务的一致性和可预测性。
1 风电机组减载控制策略
目前主流变速恒频风电机组包括双馈型和直驱型2 种,虽然两者的拓扑结构和运行原理不同,但在变流器控制系统设计和功率控制策略方面相似,分别通过发电机转子侧和电网侧变流器实现最大风能捕获,提高风能利用效率。变速风电机组通过改变自身有功功率输出,预留调频所需功率裕度,从而实现对系统一次频率调节,其控制方法主要包括转子转速控制和桨距角控制。风电机组减载控制原理图如附录A图A1所示。
1.1 转子转速控制
转子转速控制是利用转子加、减速,使风电机组运行于非最大功率点跟踪模式,通过将转速从最优转速ω0提高到ω1或减少到ω2来改变风能捕获系数,从而实现风电机组减载控制,但升叶尖速比方案优于降叶尖速比方案,原因如下:
1)升叶尖速比方案控制转子加速使叶尖速比λ增大,风电机组运行于功率系数Cp的稳定部分,当采用降叶尖速比方案时系统稳定性可能会下降[16];
2)风电机组实际运行中转子转速受到严格控制,转速过低可能导致机组停转,而升叶尖速比方案的转动惯量储存了更多的动能,可快速参与系统频率调节。
1.2 桨距角控制
转子转速控制响应速度快,但受到最大转速的限制,存在控制盲区,当风速超出额定风速后,需要进一步采用桨距角控制实现风电机组减载控制。如附录A 图A1 所示,在同一初始风速v0下,通过变桨调节将桨距角从初始值β0增加到β1来实现同样的减载运行。桨距角控制提供频率调节的主要缺点是变桨系统响应速度较慢,频繁的桨距角动作容易造成机械装置磨损,从而缩短风电机组使用寿命。
1.3 疲劳载荷分析
风电机组参与一次调频可改善系统频率响应特性,然而风电机组属于疲劳器械,参与调频需要频繁改变有功出力来主动响应频率的变化,将导致机组的桨距角和发电机转矩频繁动作,增加疲劳损伤,缩短风电机组使用寿命。风电机组调频过程中产生的疲劳损伤主要包括以下2 类[17]:一类是传动轴形变扭矩Ts,风电机组主轴将承受由有功出力变化而引起的疲劳载荷,转矩的不平衡状况将导致材料微裂纹积累;另一类是塔筒底部弯矩MT,风轮平面传递至塔筒的水平循环推力会引起塔筒振动,而在风电机组调频过程中可能会加大该振幅。
根据文献[18],Ts可以通过传动轴形变量θs和刚度Ks表示,即:
式中:ωr和ωg分别为风电机组转子转速和发电机转速;ηg为齿轮箱增速比。MT可通过计算风电机组轴向推力系数Ct近似求得:
式中:R为风轮半径;ρ为空气密度;v为风轮轮廓中心水平风速;λ为叶尖速比;β为桨距角;Ht为塔筒高度。
2 减载控制下一次调频特性分析
考虑到不同减载控制方式的特点,风电机组在中、低风速下优先通过转子转速控制预留功率裕度;当转子转速控制无法满足功率裕度需求时,进一步采用桨距角控制,协助转子转速控制共同为系统提供功率支撑。2 种控制方法的频率响应特性不同,下文将分析两者对系统频率响应的影响。
2.1 转子转速控制下风电机组一次调频响应分析
频率下垂控制可以集成至转子转速控制器中,模拟传统同步机组一次调频响应能力。传统频率调节方案产生的有功功率响应取决于所采用的功率跟踪方法,商业风电机组最常用的2 种功率跟踪方法分别为转矩控制和功率信号反馈[19]。目前大量研究集中于转子转速控制技术的机组短期频率响应方面[20],未考虑功率跟踪方法对一次调频响应的影响,下面将分析不同功率跟踪方法对基于转子转速控制的风电机组一次调频响应的影响。
2.1.1 转矩控制
转矩控制中,转速参考值ωref通过测量风电机组的有功输出以及转子转速-功率参考跟踪特性曲线产生,转速误差εω经过比例积分(proportional integral,PI)控制器,得到转矩基准Tref。通过对转矩基准Tref或功率跟踪基准P*ref附加频率下垂控制,进而释放转子旋转动能为系统提供功率支撑。控制框图和转子转速-功率参考跟踪特性曲线见附录A 图A2。在下垂控制作用下,风电机组电磁功率增加,转子转速由初始位置A点向B点减速,其转速参考值ωref(由于有功输出的增加而增大)与测量转子转速ωr(由于电磁转矩大于机械转矩而减小)之间的转速误差εω将导致P*ref减小,直至转子加速恢复至初始位置A点转速ωrA(该过程中假设调频期间风速不变)。
由上述分析可知,使用转矩控制实现功率跟踪时,比例积分控制器通过对转矩基准Tref的控制实现对转子转速ωr的无差调节,即使风电机组通过转子转速控制预留功率裕度,ωr在频率支撑阶段(有功功率输出增加阶段)将自动恢复,机组最终维持在初始运行状态,无法提供稳态有功功率支撑。
2.1.2 功率信号反馈

2.2 桨距角控制下风电机组一次调频响应分析
桨距角控制中,风电机组通过减小桨距角β,增加有功功率输出,从而参与系统一次频率调节。功率跟踪曲线见附录A 图A4。不同于转子转速控制,桨距角控制器集成的频率下垂控制可以提供线性稳态频率响应,原因在于桨距角控制和下垂控制之间不存在交互影响。当系统频率变化时,通过调节桨距角来降低风轮叶片捕获的机械功率,使风电机组具备与传统同步机组相似的功频静特性。桨距角静调差系数σβ可以表示为:
式中:Δf为系统频率偏差;ΔPw为风电机组调频出力。
3 全风况下风电机组一次调频控制策略
下面提出一种风电机组一次调频控制策略,不受功率跟踪方法的影响,在全风速范围内实现对机组静调差系数的整定,中、低风速下无需启动桨距角控制,可以方便地集成至使用转矩控制或功率信号反馈功率跟踪的风电机组中。
3.1 改进转子转速控制
变速风电机组所捕获的机械功率Pm可表示为:
式中:Ktrack为功率跟踪系数。
改进转子转速控制基于功率跟踪系数Ktrack调整主动响应系统频率变化,通过采用较大的叶尖速比计算Ktrack,在实现升叶尖速比的同时,预留调频所需功率裕度,不同功率跟踪方法的控制框图如附录A图A5所示。当系统有功需求变化时,功率跟踪曲线通过调整Ktrack,保证其与系统频率偏差Δf成比例变化,从而实现风电机组一次调频响应,风能利用系数Cp_req定义为:

式中:λ1、λ2分别为任意风电机组1、2的叶尖速比。
所提改进转子转速控制方案的工作原理图如图1 所示。图中:Kopt为最优功率跟踪系数。在低频事件发生之前,风电机组根据减载后的功率跟踪曲线运行于A点,提供调频所需功率裕度。当发生低频事件时,负频率偏差(-Δf)导致跟踪曲线向左偏移,增加机组有功功率输出,一次调频响应期间机组电磁转矩大于机械转矩,转子转速一直保持减速,直至系统频率趋于稳定,此时电磁转矩等于机械转矩,转速趋于B点稳定。无论采用转矩控制或功率信号反馈,当工作于B点时,功率误差εp和转速误差εω都为0,满足系统一次调频需求。当二次备用和三次备用被调度,系统频率恢复至额定值(50 Hz)时,正频率偏差(Δf)使功率跟踪曲线向右偏移,机组功率裕度恢复至初始值。图1 中的红线和蓝线分别显示了低频事件期间风电机组频率响应轨迹和转速恢复轨迹。
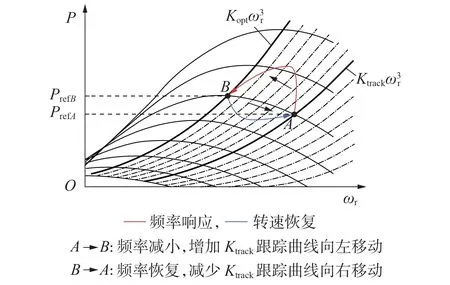
图1 所提改进转子转速控制方案的工作原理图Fig.1 Working principle diagram of proposed improved rotor speed control scheme
3.2 桨距角控制
在高风速下,转子转速达到额定转速ωlim时,风电机组不具备调频所需功率裕度,此时需要进一步采用桨距角控制实现机组减载运行。本文所提变桨频率控制结构如图2 所示。图中:βref为风电机组运行于功率恒定区时的桨距角参考值;βrefmax、βrefmin分别为βref的最大值、最小值;Pw为风电机组的实际有功输出;Tβ为桨距角调节器时间常数;fN为系统额定频率;Δω为转子转速偏差。不同风速、不同减载系数下所提变桨频率控制结构整定的预留桨距角如附录A 图A6 所示。变桨频率控制器通过查表得到预留桨距角β0,整定出桨距角静调差系数σβ,进而对系统频率起到调节作用,分担系统不平衡功率,桨距角控制方程可表示为:

图2 变桨频率控制结构图Fig.2 Structure diagram of frequency control based on variable pitch
式中:Kpw、Kiw分别为变桨频率控制器比例、积分系数;βf为调频控制产生的参考桨距角。
3.3 改进转子转速和桨距角协调控制的一次调频策略
综上所述,基于改进转子转速与桨距角协调控制的一次调频控制框图如图3 所示。图中:Pe为风电机组的电磁功率。当风电功率过剩或需要风电机组主动参与系统一次调频时,风电机组得到减载指令,将不再运行于最大功率点跟踪模式,其控制决策系统接收来自风电场调度层的减载系数d、风电机组的实际有功输出Pw、风速v、转速静调差系数σω、桨距角静调差系数σβ等参数,根据测量的转速判断选择切换3.1 节及3.2 节提出的控制策略,在额定转速以下采用改进转子转速控制,在额定转速以上采用桨距角控制。风电机组的输出功率保持在一个恒定区域,并留有一定的功率储备,保证只有风电机组超过额定转速时,桨距角才发生动作,使风电机组具备与传统同步机组相似的功频静特性,进而协助转子转速控制共同为系统提供功率支撑。
所提策略充分考虑了风电机组的调频能力,根据各自的特点将转子动能控制和桨距角控制相结合,预留调频所需功率裕度,消除功率跟踪方法与下垂控制间的交互影响,满足电网一次调频控制要求,改善风电机组的调频特性,使风力发电机组像传统同步发电机组一样具备下垂特性。其控制流程如附录A图A7所示。具体控制步骤如下:
1)当风电机组接收到减载控制指令时,获取相应的减载系数d、转速静调差系数σω和桨距角静调差系数σβ,同时测量系统频率偏移Δf和风电机组转子转速ωr;
2)判断系统频率偏移的绝对值|Δf|是否超过调频死区Δfd,其中设定Δfd=0.03 Hz,若是,则Δf=Δfd,否则Δf=0;
3)若转子转速小于额定转速ωlim,则风电机组采用改进转子转速控制参与系统一次调频,若转子转速大于额定转速,则采用桨距角控制,使风电机组具备一次频率调节能力。
4 算例分析
采用双馈风电机组验证所提控制策略的有效性,在MATLAB/Simulink搭建如附录B图B1所示的两区域4机系统,对改进转子转速与桨距角协调参与电网一次调频进行仿真分析。图中:G1为有160 台1.5 MW 双馈感应发电机组的风电场;G2—G4均为具有一次调频的火电厂(容量均为900 MW);系统负荷L1、L2均为有功负荷,容量为800 MW;系统其余参数如附录B表B1所示。
4.1 不同减载策略疲劳载荷分析
本节主要分析不同减载控制策略对机组疲劳载荷及损伤等效载荷(damage equivalent load,DEL)的影响,机组建模采用NREL-5 MW 模型,仿真实验中湍流风、疲劳载荷计算基于SimWindFarm工具箱完成。
4.1.1 平均风速8 m/s
附录B 图B2 为平均风速8 m/s(湍流强度设为0.06,风速低于额定风速)时不同控制策略对机组状态的影响。由图B2(a)可见,桨距角控制、转子转速控制和本文所提控制策略均可有效实现风电机组减载运行,为系统提供持续的功率支撑。由图B2(b)—(d)可知,所提控制策略下Ts的变化幅度下降明显,对MT而言,桨距角控制以降叶尖速比运行,有效减缓风电机组MT的波动状况。
为进一步对比不同控制策略下风电机组疲劳载荷,本文对机组Ts、MT进行雨流循环计数分析和DEL 计算,不同减载策略Ts、MT雨流循环统计的二元直方图以及DEL 分别如附录B 图B3 —B5 所示。对Ts而言,所提控制策略疲劳载荷均值和幅值明显降低,DEL 最小。这说明在低风速段下所提控制策略对风电机组的Ts具有一定优化作用。对MT而言,桨距角控制对塔筒DEL 影响较小,但低速运行下风电机组有停机的风险。此外,风电机组在低风速下仅依靠桨距角控制参与系统频率调节,提升有功出力的响应速度相对缓慢,控制难度较大。
4.1.2 平均风速14 m/s
当风机处于高风速下时,需通过桨距角控制实现风电机组减载运行。附录B 图B6 为平均风速14 m/s(湍流强度设为0.06,风速高于额定风速)时不同控制策略对机组状态的影响。由图B6(a)可见,由于变桨执行机构为机械部件,响应速度较慢,实际上功率无法完全稳定于调度指令所规定的减载量处,当风速波动较大时,容易偏离其减载量。由图B6(b)—(d)可知,由于桨距角的频繁调节,所提控制策略对Ts和MT影响较大。
不同减载策略Ts、MT雨流循环统计的二元直方图以及DEL 分别如附录B 图B7 —B9 所示。相比于无功率储备控制,采用所提控制策略时风电机组Ts、MT的疲劳载荷均值较小,风电机组传动轴形变扭矩和塔筒底部弯矩的DEL 有所减小。这说明所提控制策略在高风速段下对风电机组的Ts、MT具有一定的优化作用。
综合以上2 个实验对比可知,所提控制策略能提供可靠的调频功率裕度,实现风电机组全风速范围内对系统的功率支撑,同时降低机组减载运行时的疲劳载荷,延长使用寿命。
4.2 所提控制策略一次调频有效性分析
为验证所提策略一次调频的有效性,设置恒定风速和平均风速较低、较高3 种工况进行算例仿真,在恒定风速和平均风速较低的仿真中,考虑5 种风电场有功调节策略,具体设置如下:
1)策略1(无下垂控制),风电机组按转子转速控制预留10 % 功率裕度,采用转矩控制实现功率跟踪;
2)策略2(传统下垂控制),风电机组按转子转速控制预留10 % 功率裕度,采用转矩控制实现功率跟踪,下垂系数Kd=20,控制策略如图A2(a)所示;
3)策略3(传统下垂控制),策略3 与策略2 类似,但功率跟踪方法采用功率信号反馈实现,控制策略如图A3(a)所示;
4)策略4(所提控制策略),机组按所提控制策略设置减载系数d=0.1 和转速、桨距角静调差系数σω=σβ=0.05,采用转矩控制实现功率跟踪;
5)策略5(所提控制策略),策略5 与策略4 类似,但功率跟踪方法采用功率信号反馈实现。
4.2.1 场景1:恒定风速
1)负荷突增系统频率动态响应。
设恒定风速为10 m/s,系统有功负荷L2在50 s时增加0.1 p.u.阶跃负荷,此时系统出现功率缺额,系统动态响应仿真波形如图4 所示,图中Pw为标幺值,后同。不同策略效果对比如表1 所示,表中稳态功率支撑为标幺值。
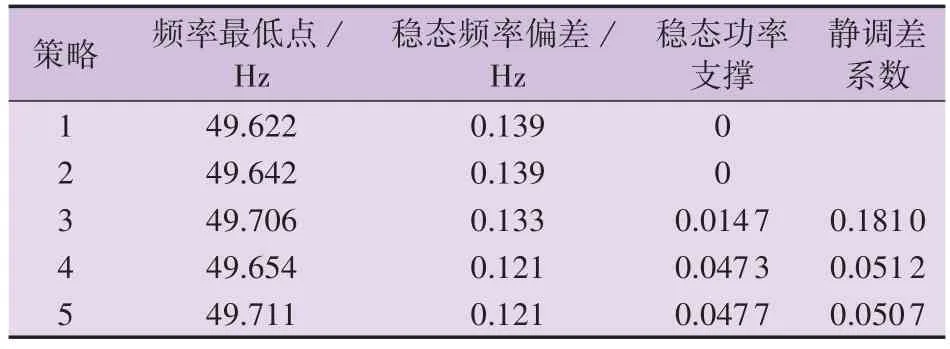
表1 不同控制策略效果对比Table 1 Comparison of effect among different control strategies

图4 场景1下负荷突增时系统动态响应对比Fig.4 Comparison of system dynamic response during load surge under Scene 1
策略1 在系统功率需求变化时无法进行有功调节,频率偏移较大。策略2 可通过下垂控制实现风电场有功调节,频率动态性能稍有改善,然而调频响应后,有功输出并未持续增加,无法提供稳态有功功率支撑,其频率响应实际为惯性响应,而非典型的一次调频响应。策略3 未出现转速自动恢复,风电机组通过降低转子转速提供持续的功率支撑,但功率跟踪控制环节削弱了机组频率响应能力,频率响应不遵循线性频率下垂特性。策略4 由于采用转矩控制实现功率跟踪,相比于策略3 不具备较好的惯性响应能力,但与策略5 都可以产生预期的一次调频响应。策略4、5 下风电机组静调差系数分别为0.051 2和0.050 7,与设定的0.05基本相符,具备与传统同步机组相似的功频静特性。
2)负荷突减系统频率动态响应。
负荷突减的系统动态响应仿真波形如附录C 图C1所示,不同策略效果对比如附录C表C1所示。由图可知,相同负荷扰动情况下,5 种控制策略下的风电场稳态功率支撑分别为0、0、0.018 1、0.052 7、0.053 3 p.u.,其结果表明,所提控制策略产生的频率下垂响应在稳态时不受功率跟踪方法的影响,实现了对机组静调差系数的整定,证明了本文所提一次调频控制的频率改善效果优于传统一次调频控制。具体分析与负荷突增时基本类似,此处不再赘述。
4.2.2 场景2:平均风速较低
1)负荷突增系统频率动态响应。
设定平均风速为8 m/s(湍流强度为0.06),系统有功负荷L2在300 s时增加0.1 p.u.阶跃负荷,图5给出了不同策略下系统动态响应曲线对比。由图可知,风速波动对系统频率稳定性产生较大影响,策略1、策略2下系统的频率最低点分别为49.631、49.65 Hz,与策略1 和策略2 相比,采用策略3 时系统表现出较好的频率动态响应特性,频率最低点为49.715 Hz,但风电机组频率响应特性与设定的静调差系数差异较大,相比之下采用策略4 和策略5 时,系统利用预留功率裕度,可以提供快速且长时的功率支撑作用,频率响应遵循线性频率下垂响应特性,满足系统一次调频需求。
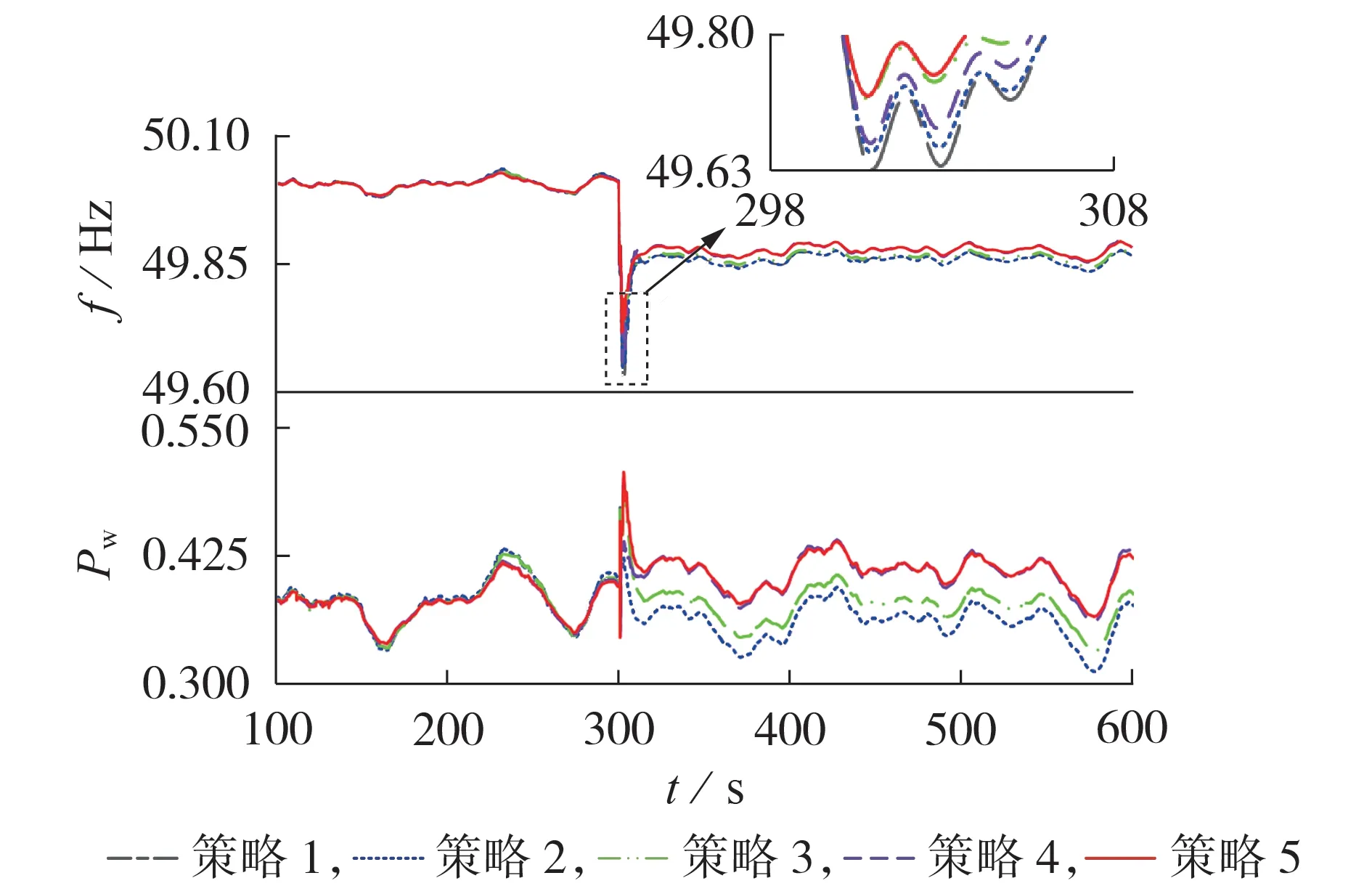
图5 场景2下负荷突增时系统动态响应对比Fig.5 Comparison of system dynamic response during load surge under Scene 2
2)负荷突减系统频率动态响应。
同样,在300 s 时,系统负荷突减0.1 p.u.阶跃负荷,系统动态响应仿真波形如附录C 图C2 所示,策略4 和策略5 在稳态响应能保持良好的频率波动抑制效果。相较于传统一次调频控制,本文所提一次调频控制可释放更多的风电机组储备功率,更好地改善了风电系统频率响应特性。
4.2.3 场景3:平均风速较高
1)负荷突增系统频率动态响应。
设定平均风速为14 m/s(湍流强度为0.06),系统有功负荷L2在300 s 时增加0.1 p.u.阶跃负荷,其系统频率响应动态过程仿真波形如附录C 图C3 所示。可以看出,在高风速下,风电机组通过引入预留桨距角,实现功率恒定区机组减载备用运行,在频率动态响应过程中通过减小桨距角,增加风能捕获,进而主动响应系统频率变化。在所提控制策略下,系统频率最低点由49.604 Hz 提升至49.690 Hz,跌落幅度减少了21.72 %,对系统起到了显著的惯性支撑,同时在一次调频过程中能够提供长时的功率支撑作用,分担系统不平衡功率。
2)负荷突减系统频率动态响应。
负荷突减的系统动态响应仿真波形如附录C 图C4 所示。由图可知,所提一次调频控制下,最大频率偏差降至0.372 Hz,相较于无附加控制降低了21.7 %,负荷突减情况上述相似,不再赘述。由于变桨执行机构为机械部件,提升有功出力的响应速度相对缓慢,当风速波动较大时,风电机组对系统频率响应的改善作用也受到相应限制,有功支撑表现出的调频特性波动较大。
5 结论
本文在分析不同功率跟踪方法对风电机组频率响应影响的基础上,考虑不同风速下转子转速控制与桨距角控制预留功率裕度方式和频率响应能力的不同,提出一种改进转子转速和桨距角协调控制的一次调频策略,实现了对机组静调差系数的整定,满足系统一次调频需求,通过仿真分析得出如下结论:
1)风电机组采用常规下垂控制时,不同功率跟踪方法对其动态性能和稳态性能有较大影响,机组不能有效地利用转子速度控制所预留的功率裕度提供一次频率调节;
2)不同减载控制策略对风电机组疲劳载荷影响不同,通过分析和计算不同策略机组疲劳载荷和DEL,仿真结果表明,本文所提控制策略有利于降低机组减载运行时的疲劳载荷,延长使用寿命;
3)本文所提控制策略产生的频率下垂响应在稳态时不受功率跟踪方法的影响,在全风况下能够提供稳态频率响应,实现了对风电机组静调差系数的整定,提高了风电场参与系统频率调节服务的一致性和可预测性。
附录见本刊网络版(http://www.epae.cn)。
