基于Mueller 矩阵的水下偏振成像方法
2023-09-08韩平丽范颖颖邵晓鹏
韩平丽,范颖颖,杨 波,刘 飞,邵晓鹏
(1.西安电子科技大学 光电工程学院,陕西 西安,710071;2.西安市计算成像重点实验室,陕西 西安,710071)
0 引言
海洋蕴藏着丰富的石油、天然气等资源,水下成像技术是进行海洋资源勘测的重要技术手段,深入研究水下成像技术,对开发海洋资源、监测海洋环境有重要价值。
水下偏振成像技术是一种有效的水下成像技术,其以水下场景中目标信息光与背景散射光偏振特性不一致为切入点,通过算法将两者分离,从而有效去除场景中的背景散射光,实现目标图像的清晰重建。
1995 年,宾夕法尼亚大学的Rowe 等[1-2]提出了偏振差分成像技术,该技术将与偏振片透光轴夹角相互平行和相互垂直的偏振子图像相减得到偏振差分图像,有效地抑制了图像中的背景散射光,提升了成像清晰度。之后,Schechner 等[3-4]提出了水下被动偏振成像技术,利用偏振差分成像技术采集水下场景的两幅正交偏振子图像,计算背景散射光偏振度以及背景散射光强度,最后通过光场辐射光衰减模型提取水下场景的目标信息光。Treibitz 等[5]提出了主动水下偏振成像方法,该方法以照明光源辅助,探测和提取目标和后向散射光偏振信息,有效实现了目标信息的重建,提高了成像质量和成像距离,该研究也为水下偏振成像研究奠定了重要基础。近年来,国内学者也针对水下偏振成像技术开展了深入研究。Huang 等[6]提出水下目标同步清晰成像技术。Han 等[7]解决了水下偏振成像中的前向散射光影响问题,通过建立图像边缘信息刃边与前向散射刃边的对应关系,反演初始成像场景,求解出前向散射导致水下浑浊场景中图像变模糊的过程,从而有效解译目标信息光,实现清晰成像。Liu 等[8]针对高浑浊度水体提出一种基于波段选择的水下偏振成像方法,根据高浑浊度水体强散射的特点,采用红光波段照明辅助探测,利用红光的强穿透性,结合配套算法,有效提升了高浑浊度水体中的成像对比度和成像距离,拓宽了水下偏振成像技术的应用范围。Hu 等[9]将深度学习技术引入水下偏振成像中,能够有效去除背景散射光,恢复清晰水下场景,为水下偏振成像技术发展提供了新思路。
但是以上方法通常适用于表面反射情况比较单一且主要为漫反射的目标物,当目标表面同时产生镜面反射和漫反射时(如包含光滑表面的多材质目标),会因退偏程度差异导致成像结果严重失真[10]。Muller 矩阵能够全面表征介质对入射光偏振特性的改变,利用这一特点,Liu 等[11]利用Muller矩阵估计水体的退偏系数,进而精确求解多材质目标信息光偏振特性,实现了水下多材质目标清晰图像的有效重建。该方法着重考虑了水体的退偏效应,对目标自身特性的关注度较低,因此成像效果仍有提升空间。
针对水下偏振成像中多材质目标的清晰成像问题,文中利用Mueller 矩阵可以全面表征偏振特性的特点,通过双旋波片法测得偏振子图,全面分析水下场景中多材质目标物信息光以及背景散射光偏振度信息,结合经典水下成像技术构建基于Mueller 矩阵的水下偏振成像方法,有效分离目标信息光与背景散射光,提升成像质量,实现多材质水下目标物的清晰重建。
1 水下偏振成像技术
1.1 理论模型
水下偏振成像技术利用背景散射光和目标信息光偏振特性的差异移除背景散射光,恢复场景目标信息,可提高水下成像质量[12],其成像过程如图1 所示。

图1 水下偏振散射成像模型Fig.1 Underwater polarization scattering imaging model
主动水下偏振成像模型为[5]
式中:Iobj为目标信息光;Iscat为背景散射光;Imax为偏振探测时获取的最大光强图;Imin为偏振探测时获取的最小光强图;pb和pt分别为背景散射光与目标信息光的偏振度。由上式可见,恢复清晰水下图像的关键为获取偏振度pb和pt。
1.2 存在的问题
pb的计算是选取某一无目标区域,利用下式计算。
传统主动偏振成像模型中背景散射光偏振度
式中,B‖和B⊥为采集到的偏振子图像中的背景散射光部分强度。
对目标偏振度pt则近似认为其为零。此方法适用于粗糙表面目标物的重建,由于粗糙表面区域的偏振度可近似为零,因此可用常数零表示,符合传统偏振成像技术对目标偏振度的预设。
但在实际探测中,若目标表面同时包含强镜面反射和漫反射,如目标物由多种材质组成,且包含光滑表面(如金属),根据菲涅尔定律,材质不同,对入射光的退偏效应也不相同,从而造成表面偏振度分布不均匀。光滑表面一般可以有效维持入射光的偏振特性,但只用常数零来替代整个目标物的偏振度不能准确估计目标偏振度和背景散射光偏振度。因此,传统偏振成像方法中对目标信息光偏振度的假设无法直接应用于同时包含粗糙表面和表面光滑的目标物的重建,否则将严重影响成像效果。
图2 以表面光滑的金属和表面粗糙的纸片目标为例,表明由于二者退偏效应的差异导致传统水下偏振成像方法无法有效恢复多材质目标信息。其中,图2(a)为多材质目标水下光强图,红框区域为估计背景散射光所选取的背景区域;图2(b)为成像结果,可见目标物整体重建效果较差,金属部分完全失真,非金属部分(纸)重建效果良好;图2(c)为估计的背景散射光,可见背景散射光图像中含有目标物金属部分的信息,由此推断,传统水下偏振成像技术未能准确估算目标信息光与背景散射光的偏振度信息,导致成像过程中错误地将目标金属部分的偏振信息与背景散射光混合,最终重建失败。
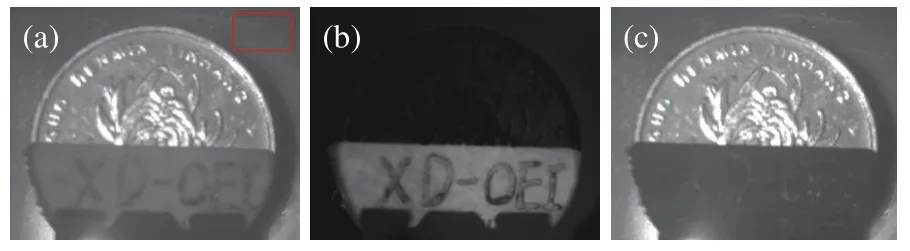
图2 多材质目标传统水下偏振成像Fig.2 Traditional underwater polarization imaging of object made of diverse materials
2 水下目标Mueller 矩阵
2.1 计算原理
水下目标Mueller 矩阵探测方法有反射式双旋波片法和透射式双旋波片法2 种。在反射式探测中,入射光在水体中的传输过程如图3 所示,光波经过水体时偏振状态会发生变化,因此可将水体视为一个偏振元件,将包括目标物以及浑浊水体的整个水下场景作为探测目标,计算水下场景的Mueller 矩阵为Munderwater,此时水下场景中目标物的Mueller 矩阵为Mtarget,水体的Mueller 矩阵为Mliquor,则有
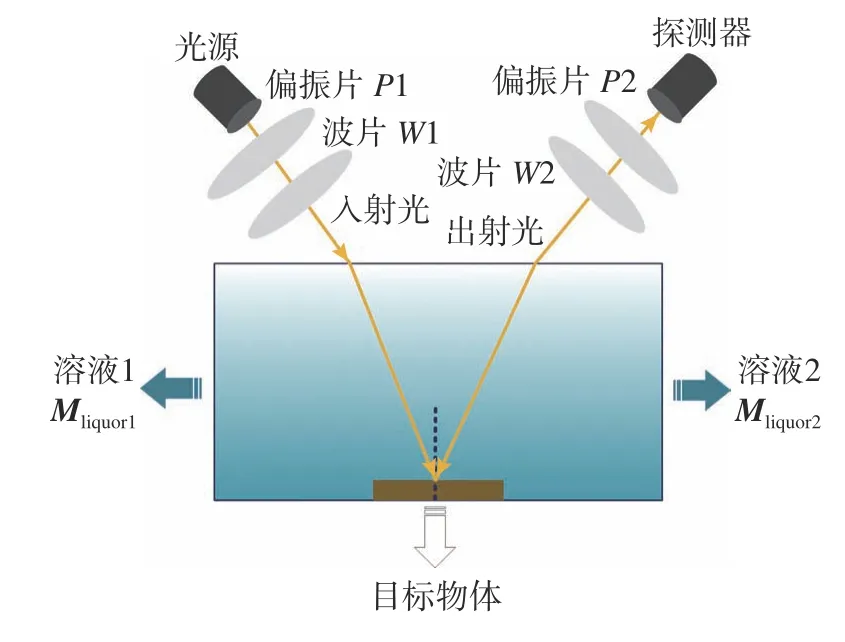
图3 反射式双旋波片法原理图Fig.3 Principle of reflection-based double rotating wave plate method
在透射式探测场景中(如图4 所示),将水体作为探测目标,计算水体的Mueller 矩阵为Mliquor。

图4 透射式双旋波片法原理图Fig.4 Principle of transmission-based double rotating wave plate method
假设实验过程中水体均匀且目标物表面近似光滑,则光波在物体上反射时反射角等于入射角,因此反射端水体Mueller 矩阵可近似等于入射端水体Mueller 矩阵,即
将式(4)代入式(3)中,计算可得水下场景中目标物的Mueller 矩阵为
2.2 实验设计
实验主要分为两部分,第1 部分利用反射式双旋波片法测量浑浊水体环境下目标物偏振子图;第2 部分利用透射式双旋波片法测量浑浊水体环境下水体的偏振子图。
反射式双旋波片法的实验装置如图5 所示,起偏装置与检偏装置在探测目标的同一侧,且起偏装置与检偏装置与水箱探测面法线的夹角相同,2 个装置距离水箱外壁均为10 cm。
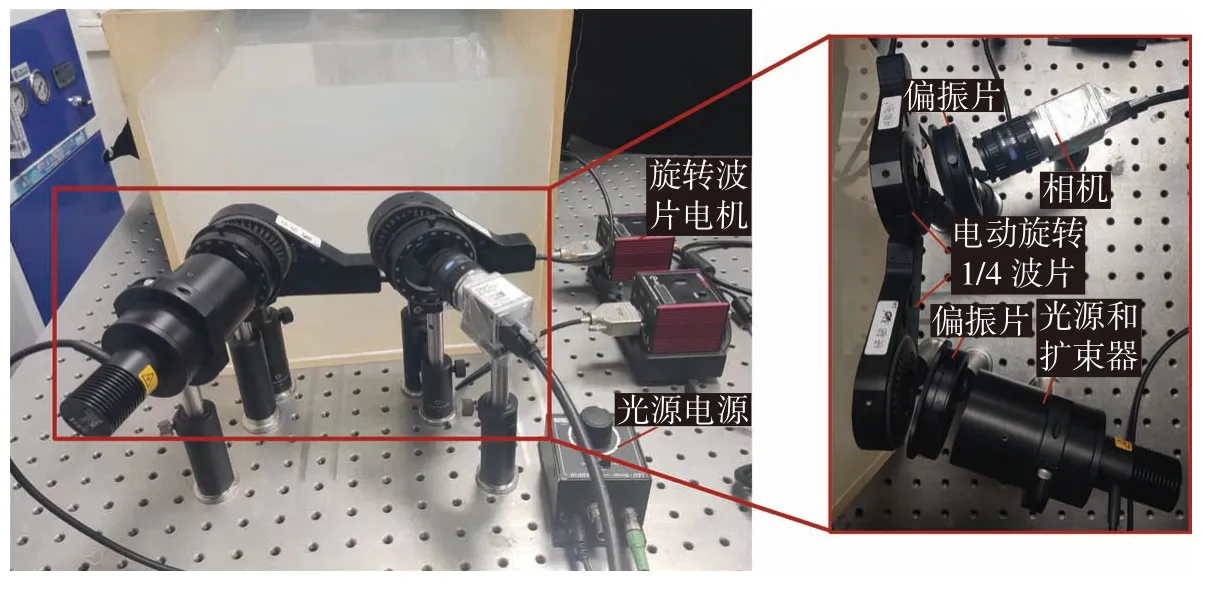
图5 反射式双旋波片测量装置Fig.5 Measuring device of reflection-based double rotating wave plate
透射式双旋波片法的实验装置如图6 所示。起偏装置与检偏装置分别在探测目标的两侧,为保证入射光在水体环境中的单侧路径相同,应保证透射式起偏装置和检偏装置与水箱法线的夹角与反射式探测装置的夹角相同,然后对不同浑浊度水体的Mueller 矩阵进行测量。

图6 透射式双旋波片测量装置Fig.6 Measuring device of transmission-based double rotating wave plate
3 基于Mueller 矩阵的水下偏振成像模型
3.1 成像模型
已知水下场景、目标和水体Mueller 矩阵的计算方法,在此基础上利用所求的目标物Mueller 矩阵和水体Mueller 矩阵分别求解其偏振度,利用水下场景的Mueller 矩阵求解最大光强图与最小光强图,最后结合传统主动水下偏振成像方法建立基于Mueller 矩阵的水下偏振成像模型。
1) 目标物偏振度求解
Mueller 矩阵全面表征介质的偏振特性,因此,可利用目标物的Mueller 矩阵推导出目标物偏振度的表达式
式中:tr(·)表示求矩阵的迹;m00为Mueller 矩阵中第2 个元素的值,此公式描述的是1 个Mueller 矩阵与理想退偏器Mueller 矩阵间的欧氏距离,可用来表征入射光为偏振光场景下目标物的偏振度[13]。
2) 背景散射光偏振度求解
背景散射光的偏振度会随着水体浑浊度的改变而改变,因此需要对入射光在水体中传输与散射的过程进行分析。在目标信息获取过程中,入射光先经水体传播到目标物上,再经目标物反射传输出水体,因此入射光需经过2 次水体的偏振调制。上节利用透射式双旋波片法来探测水体的Mueller 矩阵,所测得水体的Mueller 矩阵是当前浑浊度下水体的固有属性。假设入射光的Stokes 矢量为入射时第1 次经水体调制的Mueller矩阵为,出射时第2 次经水体调制的Mueller 矩Mliquor1阵为,假设水体均匀,根据式(4)中水体Mliquor2Mueller 矩阵的关系,入射光经水体的2 次偏振调制后出射光的Stokes 矢量表达式为
设所测量水体的Mueller 矩阵为
令Msystem=MliquorMliquor,则
在传统主动成像模型中,起偏光源采用的是线偏振光,入射光的Stokes 矢量假设与水体Mueller 矩阵测量的实验环境和实验条件同等,计算可得出射光的Stokes 矢量为
计算得出背景散射光的偏振度为
3)Imax和Imin求解
前述了利用反射式双旋波片法测量水下目标场景Mueller 矩阵,设水下目标场景的Mueller 矩阵为
水下目标场景的偏振度为
将式(6)、(12)和(17)代入式(1),可建立基于Mueller 矩阵的水下偏振成像模型,有效分离目标信息光与背景散射光,实现水下清晰成像。
3.2 目标信息光偏振度分析
当水体浑浊度为17.4 NTU 时,目标物偏振度图像强度分布如图7 所示。

图7 浑浊度17.4 NTU 水体中目标物偏振度强度分布Fig.7 Degree of polarization distribution of target in water with 17.4 NTU turbidity
金属表面的纹理特征也会影响其偏振特性,已知硬币表面花纹部分是凹凸不平的,凸出来的金属部分通常与入射光发生镜面反射,入射光与金属部分的接触较少,因此在传输过程中偏振能量损耗少,保偏性强,探测器所探测到的经硬币表面凸纹的出射光的偏振度较高。硬币表面粘贴的纸条为非金属,非金属相对金属对入射光发生吸收与漫反射的几率更高,引起入射光的退偏效应,导致硬币上面粘贴有纸条部分的偏振度整体较小。
为探究不同浑浊度下目标物偏振度的差异,在清水中加入脱脂牛奶,分别模拟浑浊度为17.4、23.0、31.6、40.2、48.9、53.4 和64.5 NTU 的浑浊水体。获取目标物的偏振度图如图8 所示。其中:(a1)~(a7)为不同浑浊度水体中目标强度图;(b1)~(b7)为不同浑浊度水体中目标偏振度图;(c1)~(c7)为不同浑浊度水体中目标偏振度三维强度分布图。

图8 不同浑浊度水体中的目标偏振图Fig.8 Degree of polarization distribution of target in water with different turbidity
由图8 可知,目标偏振度信息会随着水体浑浊度的变化发生变化。分别在目标物金属和非金属部分各选取10 个像素点,记录其偏振度随浑浊度的变化情况,如图9 所示。其中,图9(a)为特征点选择,红点为10 个金属偏振度选取的区域,绿点为10 个纸带非金属偏振度选取的区域;图9(b)显示了特征点偏振度随浑浊度的变化情况,图上实线对应金属部分特征点,虚线对应非金属部分特征点。由图可知,目标物金属部分的偏振度总体高于非金属部分的偏振度,随着水体浑浊度增加,金属部分偏振度有所升高,当浑浊度继续增加时,偏振度开始逐渐下降,产生该现象的主要原因在于散射介质具有一定的起偏特性[14]。非金属部分偏振度随水体浑浊度增加而升高,随着浑浊度的增加,目标物金属与非金属部分偏振度差异逐渐减小。可见随水体浑浊度变化,不同材料偏振度的变化趋势不同,证明单一常数值不能用来代表复杂材质目标物的偏振度值。

图9 目标偏振度随浑浊度变化情况Fig.9 Variation of degree of polarization of target with turbidity
3.3 背景散射光偏振度分析
为探究不同浑浊度水体中背景散射光的偏振特性,分别在17.4、23.0、31.6、40.2、48.9、53.4 和64.5 NTU 的浑浊水体中测量背景散射光偏振度,如图10 所示。其中: (a1)~(a7)为不同浑浊度下背景散射光偏振度分布图;(b1)~(b7)是不同浑浊度下背景散射光偏振度三维强度图。
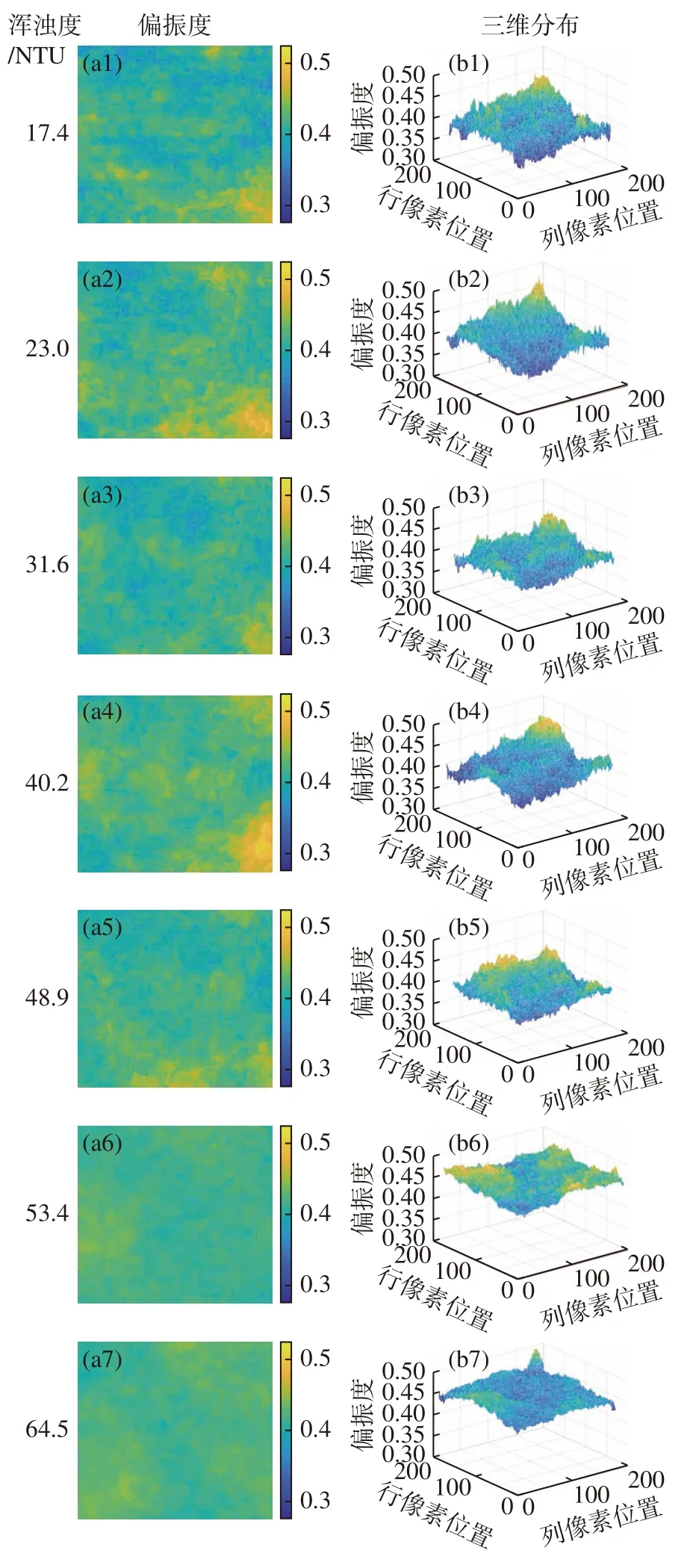
图10 浑浊场景背景散射光偏振度图Fig.10 Degree of polarization of background scattered light in turbid water
由图10 可见,水体背景散射光的偏振度基本稳定于0.3~0.5 范围内。原因在于实验水体环境下散射介质较为单一,且悬浮粒子的直径与入射光的波长接近,入射光与粒子主要发生米氏散射,因此相较目标物,水体退偏环境更为稳定,故偏振度相对稳定[15]。
从上述分析可知背景散射光偏振度随水体浑浊度改变而变化,为了更直观地观察偏振度的变化规律,分别在不同浑浊度场景的背景散射光的偏振度中选取10 个特征点,记录其在不同浑浊度场景中的数值,如图11 所示。
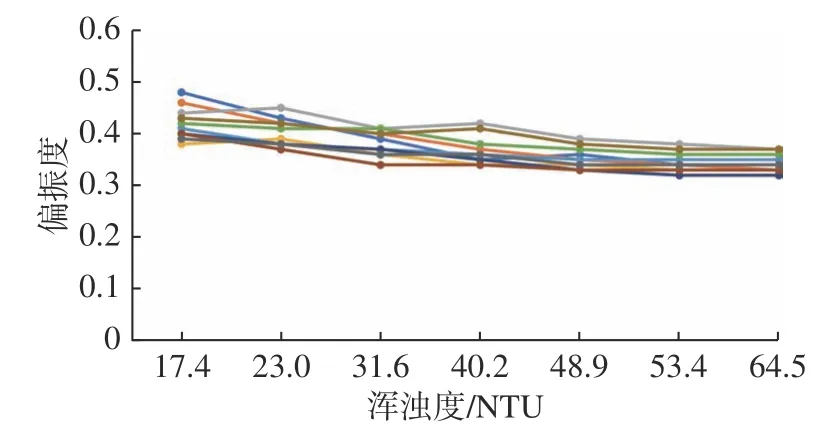
图11 特征点背景散射光偏振度随浑浊度变化情况Fig.11 Variation of degree of polarization of feature points from background scattered light with turbidity
由图11 可见,随着水体浑浊度的增加,背景散射光偏振度呈下降趋势并最终趋于稳定[16-17]。
4 实验结果与数据分析
实验分析了7 种不同浑浊度水体下的重建结果,如图12 所示。图中,(a1)~(a7)为原始光强图像,随着水体浑浊度升高,目标物金属与非金属部分的细节信息逐渐被背景散射光淹没,导致原始光强图像对比度下降;(b1)~(b7)为经Mueller 矩阵水下成像方法处理后的目标图像,目标金属和非金属部分对比度相较于原始光强图像均有一定提升;(c1)~(c7)为Mueller 矩阵水下偏振成像方法估计的后向散射光,背景散射光被有效移除,且背景与目标轮廓、背景与目标物花纹轮廓、背景与纸带上英文字迹轮廓以及纸带与硬币轮廓均可清晰识辨,无模糊以及弥散的情况产生,表明背景散射光分离的较为彻底且并未造成目标信息光的失真。目标主体部分信息完整,对原始光强图像的重建效果较好。目标细节上,硬币花纹部分的纹理信息较为复杂,在原始光强图中这部分图像退化相对明显,经文中方法处理后硬币表面花纹的凹凸外形得到清晰重建。

图12 文中方法实验结果Fig.12 Experimental results of the developed method
图13 为图12 中原始光强图像(图a(4))与文中方法处理结果(图b(4))的细节对比。由图13(a)和(b)可见,重建图像的对比度有显著提升,硬币金属部分和非金属部分整体和细节都得到了有效恢复。图13 中: (a)为原始光强图;(b)为文中重建结果;(c)和(d),(e)和(f)分别为(a)和(b)中细节展示。

图13 浑浊度40.2 NTU 水体中光强图像与文中重建结果对比Fig.13 Comparison of intensity image and reconstructed image by the proposed method in water with 40.2 NTU turbidity
图14 对比了文中方法与传统水下偏振成像方法[5]对复杂材质目标成像结果。由图可见,传统水下偏振成像方法中金属部分目标光信息损失严重,仅恢复出了纸带部分的信息,且随浑浊度的增大纸带信息衰减明显;文中方法重建的图像中,即使随着浑浊度增加,纸带部分和硬币金属花纹部分依然得到了较好的重建。说明文中方法在应对多材质复杂目标重建中有显著优势。
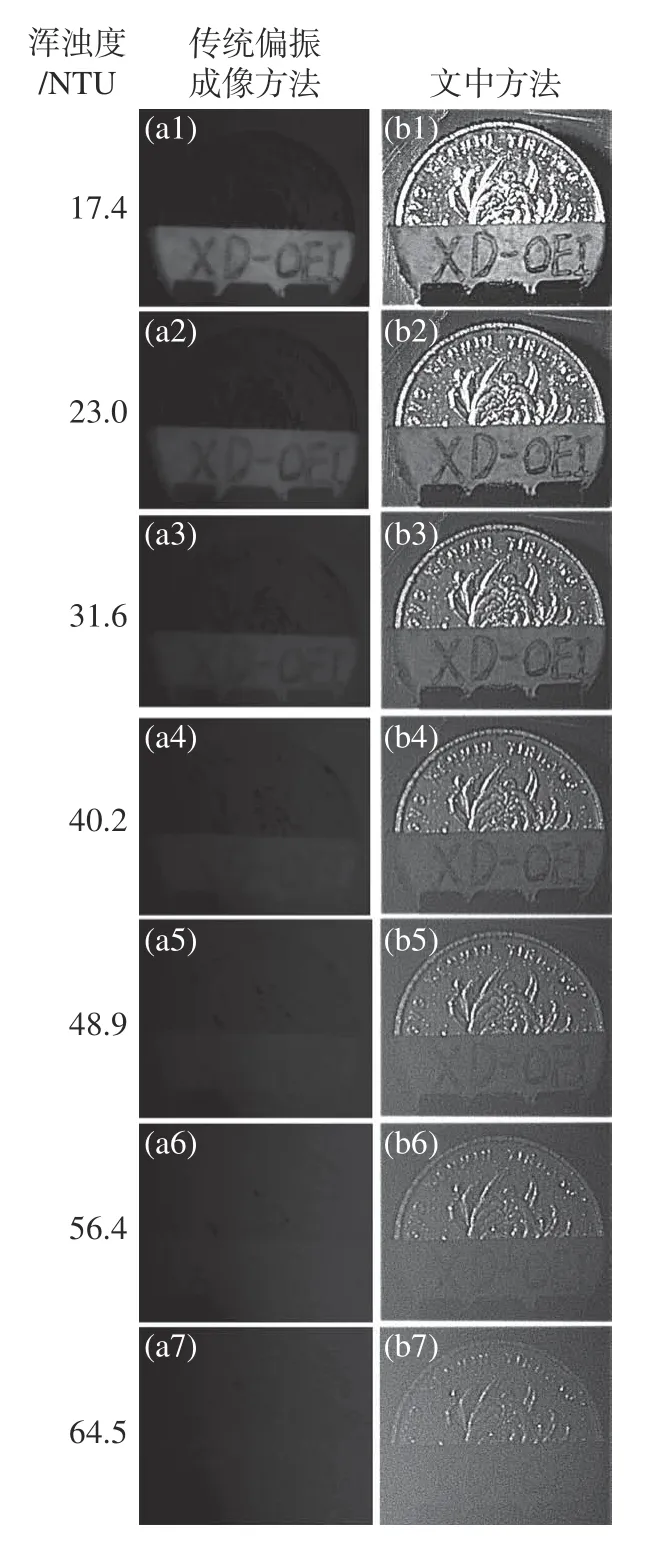
图14 传统水下偏振成像方法与文中方法对比Fig.14 Comparison of traditional underwater polarization imaging methods with the proposed method
5 结束语
文中针对水下偏振成像技术在表面复杂反射目标重建方面的问题,提出了基于Mueller 矩阵的水下偏振成像模型。以多材质目标为研究对象,利用Muller 矩阵能够全面表征偏振特性的特点,实现了水下场景中多材质目标的清晰成像。实验结果表明,该方法可以适应多种浑浊度水体条件,可有效提高成像质量,恢复多材质目标信息。未来,进一步提高Muller 矩阵的测量效率和可用于多种自然水体Muller 矩阵数据库将有效拓展水下偏振成像技术的适用范围,在水下救援、水下考古及水下工程等应用中具有重要意义。