基于UUV 的目标非声探测技术发展及趋势分析
2023-09-08李阁阁贾世鲲赵海侗兰世泉孙通帅杨绍琼
李阁阁 ,贾世鲲 ,赵海侗 ,兰世泉 ,孙通帅* ,杨绍琼
(1.天津慧洋智能装备有限公司,天津,300352;2.天津大学 机械工程学院,天津,300352;3.崂山实验室 海洋观测与探测联合实验室,山东 青岛,266237)
0 引言
水下目标探测是通过移动或固定平台搭载一定数量的探测设备对水中目标进行识别,在民用和军事领域均有重要应用价值。依据目标的运动状态,一般将被探测目标分为静止目标和运动目标。静止目标探测包括海底沉船探测、海底管道探测等;运动目标探测包括对潜艇、水雷和鱼群等目标的识别与定位探测等。目标声学探测(简称声探测)技术是目前最为主要的水下探测技术。依据探测形式,目标声探测分为主动声呐探测和被动声呐探测。声呐可搭载在飞机、船只和潜艇上,但探测能力有较大差异,如机载声呐探测距离约56~112 km,舰载声呐探测距离约20~130 km。主动声呐隐蔽性差,探测距离小于被动声呐;而被动声呐受环境噪声、平台噪声的影响较大,只有在目标发出较大噪声时才能使用[1]。随着消声技术的发展和应用,潜艇以及大型水下航行器等水下装备的自噪声已接近海洋背景噪声,使声呐对其发现能力大大降低。消声技术主要应用于水下运动目标,尤其是潜艇,所以非静态目标以及声场较大的运动目标还是以声探测为主,非声探测为辅。
水下目标探测平台包括天基、空基、水面和水下平台[2],不同的平台有不同的作用半径。以对潜艇探测为例,不同探测平台对比如表1 所示。天基探测平台是指集成光学、红外和雷达等设备的卫星,覆盖范围广,可达几百平方千米,实时性强、安全性高、准确率高,但部署成本非常高。空基探测平台是指可携带或集成多种探测设备的飞机,应用广泛、机动性高、准确率高,但是隐蔽性低、探测时间短、易受自然环境影响。水面探测平台主要指配备以声呐为主的舰艇船只,但是随着各种消声技术的发展,声呐探测能力也随之下降。文中所述水下探测平台指的是具有自主航行能力,可搭载各种传感器获取海洋环境信息,可对水下固定/移动目标开展探测、识别、定位与跟踪以及区域警戒等任务的无人水下航行器(unmanned undersea vehicle,UUV)[3],主要包括自主水下航行器(autonomous undersea vehicle,AUV)、水下滑翔机等,如图1和图2 所示。相比于其他平台,UUV具有成本低、体积小、续航时间长、隐蔽性好、机动性高、易灵活组网部署等优势,具有巨大的应用潜力[4]。

图1 自主水下航行器Fig.1 Autonomous undersea vehicle
图2 水下滑翔机Fig.2 Underwater glider
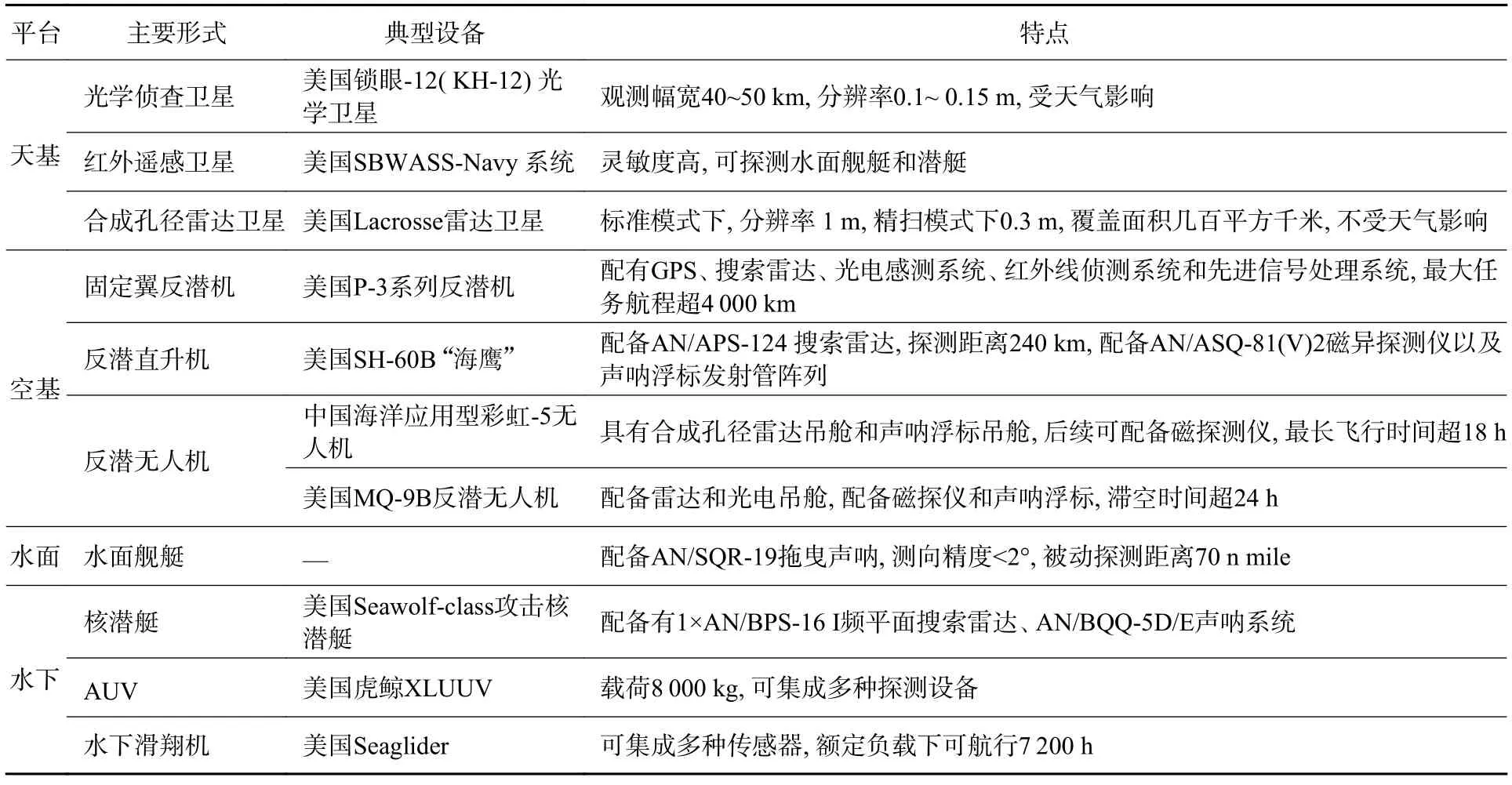
表1 不同探测平台探测形式及特点对比Table 1 Comparison of detection forms and characteristics of different detection platforms
水下非声探测技术按照探测原理可以分为磁异探测、雷达探测、激光探测、红外探测、电场探测、重力梯度探测及生物探测等。不同非声探测技术特点对比如表2 所示。
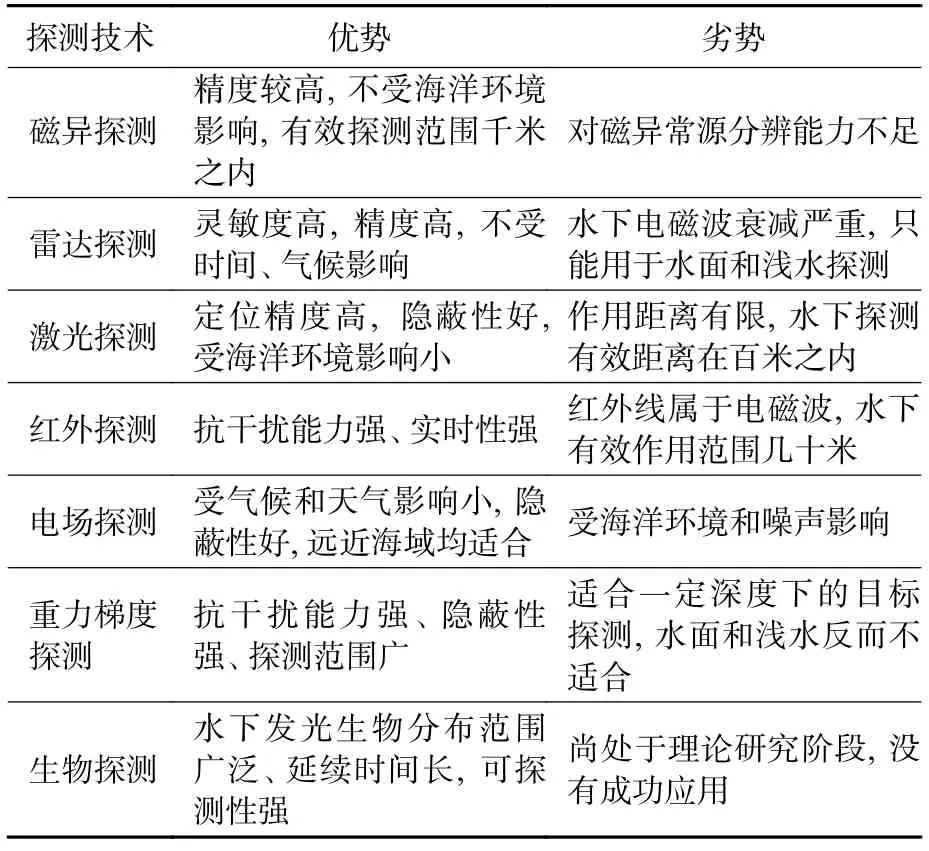
表2 不同非声探测技术特点对比Table 2 Comparison of characteristics of different nonacoustic detection technologies
磁异探测是较为成熟的非声探测技术,主要传感器是磁异探测仪。磁异探测仪广泛应用在反潜机上,也可以搭载在舰艇和UUV 上,具有探测精度高、识别能力强、不易受海洋环境影响的优点,但是对磁异常源的分辨能力有限,有时无法正确区分坐底潜艇和沉船。搭载在卫星或反潜机上的雷达探测只能探测海面或十几米深度中的运动目标。激光探测主要利用在海水中衰减波段小的蓝绿光进行探测,属于主动探测,具有定位精度高、隐蔽性好、受海洋环境影响小的优点,但是作用范围有限,一般有效作用范围为百米内。激光传感器的搭载平台为卫星、反潜机、水面舰艇和UUV 等。
红外探测仪普遍搭载在反潜机上,也可搭载在卫星和水面舰艇上,抗干扰能力强、实时性强。电场探测技术受环境和天气影响小,隐蔽性好,远近海域均适合,可以搭载在UUV 上。重力梯度探测利用地球重力场进行探测,隐蔽性强。生物探测尚处于理论研究阶段,是未来的前沿科技之一。
非声探测技术已日趋成熟,部分技术已有成熟探测设备和成功的应用场景,但是非声探测多以天基和空基为主要应用平台,探测深度以水面和水下几十米内的深度为主,对处在百米级工作深度下的运动目标探测能力较弱。随着UUV 技术的发展,凭借续航能力强、机动性强、噪声低等优势,UUV 可长时间在几百米或几千米的深度航行并探测,是未来非声探测的重要搭载平台之一。
文中介绍了UUV 和几种主要的非声探测技术的原理、工作流程、关键技术和发展现状,总结了非声探测技术的要点,并给出了依托UUV 发展非声探测技术的主要研究方向。
1 UUV 非声探测现状
1.1 水下探测 UUV 概况
UUV 主要包括AUV、水下滑翔机等[5],UUV按照功能可以划分为5 个主要模块,包括任务控制模块、导航与定位模块、负载模块、动力模块和能源模块,其中任务控制模块包括航行控制、数据采集处理、通信控制和电源控制等。
水下探测的准确度和精度一方面取决于传感器自身的精度,另一方面会受任务控制模块的数据处理能力和路径规划能力的影响;导航与定位模块决定了水下航行器的定位精度和航路误差;负载模块可以搭载或集成各种传感器,所搭载的传感器受制于负载模块的空间大小和负载能力,负载能力在UUV 设计阶段就已确定;不同的UUV有不同的动力模块,AUV 的动力模块主要是推进器,水下滑翔机则依靠浮力变化驱动航行器航行;能源模块由电池包组成,决定了UUV 的续航能力,从而影响其水下探测的时间和范围。
UUV 在搭载水下光、电、磁等传感器的基础上,在水下按照一定的路径航行并收集目标及环境的光、电、磁等数据信息,经过数据分析和特征辨识等完成对目标的探测和识别[3]。
Eagle Ray 是美国国家海底科学与技术研究所(National Institute for Undersea Science and Technology,NIUST)研制的一款AUV[6],可在2 200 m 深的海底进行高分辨率测绘,还可携带额外载荷执行其他任务。Bluefin Robotics 公司研制的大型AUV-Bluefin21 的模块化程度很高,其负载模块可直接更换侧扫声呐和海底剖面仪等传感器模块,导航精度高,航路偏移误差可控制在0.1%以内[7]。2014 年,Bluefin21 曾被用于搜寻马航MH370 失事客机。其在21 个工作日内,累计搜索了370 h,覆盖范围250 mile2。美国波音公司生产制造的军民两用超大型UUV(extra large UUV,XLUUV) Echo voyager,质量约50 t,最大潜深超过3 000 m,单次续航50 h 以上,可用于油气勘探、目标监侦和反水雷等任务[8]。美国国防部的虎鲸XLUUV 项目便以此为基础研制。冰岛Teledyne Gavia 公司研制Gavia AUV 体积小、质量轻,不需要专门的设备发射回收,2 人便可携带操控,模块化程度高,可根据任务需求更换传感器模块,包括反水雷、反潜战训练、快速环境评估、监视、搜索,以及其他以可用性和易部署性为首要考虑的任务[9]。SOG(SOEST ocean gliders)[10]是美国夏威夷大学海洋和地球科学与技术学院使用的Seaglider[11]群,可用于海洋物理探测、情报侦查、环境监测和军事应用等。
随着国内UUV 技术的发展,也涌现了多款产品化应用的UUV,天津大学设计研发了“海燕”系列水下滑翔机,其中“海燕-X”最大下潜深度达到10 619 m,是目前国际上唯一能够进行万米深渊连续观测的水下滑翔机;“海燕-II”可搭载温盐深仪、水听器等传感器,进行连续数月的水下观测任务。中国科学院沈阳自动化研究所研制的“潜龙一号”是一款6 000 m 级AUV,具备海底地形地貌、浅地层地质结构、海底流场以及海洋环境参数的探测调查能力,可携带测深侧扫声呐和浅地层剖面仪等传感器。除此之外,2021 年,哈尔滨工程大学研制的“悟空号”全海深AUV 完成了万米级的深潜试验。2021 年,西北工业大学研制的仿蝠鲼柔体潜水器完成了1 025 m 大深度试验。上述各种可用于水下探测的UUV 如图3 所示,主要参数如表3 所示。

图3 水下探测用UUVFig.3 UUVs for underwater detection
1.2 主要非声探测技术
1.2.1 磁异探测
由于探测目标建造材料的属性,会自带永久磁性,在水下航行时,其经过水域周围的磁场特性会随之改变。磁异探测原理为地球磁现象,是目前较为成熟的非声探测方法之一。UUV 搭载高灵敏度磁异探测仪可检测周围区域的磁场异常,并将检测结果与目标的磁性数学模型进行比对判断,从而确定水下磁性目标及其位置。图4所示为美国Woods Hole 海洋研究所的AUV,其搭载的三轴磁通门传感器可用来对水下磁性目标进行探测[12]。
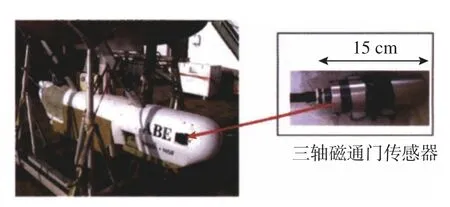
图4 搭载磁传感器的AUVFig.4 AUV equipped with magnetic sensors
常见的磁探测仪主要有磁通门传感器、光泵磁力仪、质子磁力仪和超导量子磁力仪等[13]。加拿大 CAE 公司是全球著名的设计、制造和集成磁异探测(magnetic anomaly detection,MAD)系统的公司,其为美海军研制的最新产品MAD-XR[14]如图5(a)所示。MAD 探测范围约1 200 m,MAD-XR具有前序产品AN/ASQ-508 的所有功能,同时尺寸更小、质量更轻、功耗更低,且新研制了定位辨识软件,可以以横向和纵向分离的形式进行潜艇定位,可预估出目标潜艇的质量、大小和类别。图5(b)所示为美国Polatomic[15]公司生产的AN/ASQ-233型激光氦光泵磁探仪,其探测距离为千米左右。2010 年,Polatomic 公司曾获美国国防部拨款,用于研究轻型激光梯度仪。此外,该公司还额外获得一些小规模拨款,用于研制供UUV 使用的小型磁力仪。中国船舶第701 研究所已进行多年磁通门传感器的研发,形成了多个系列的产品,当前研制的最新型号MS3A 型磁通门传感器如图5(c)所示,其分辨率为0.2 nT,已达到世界先进水平。图5(d)所示为加拿大Scintrex 公司的CS-3 高精度铯光泵磁力测量仪,具有稳定性好、灵敏度高、噪声低及工作区域广的优点,适用于航空磁探测。图5(e)所示为英国Bartington 公司生产的Grad-13 三轴数字梯度仪,可在陆地或水中进行高分辨率的矢量测量,量程为60~1 000 T,工作深度可达5 000 m。德国Coliy 公司设计和生产多种高精度磁通门高斯计,其中GFP703 三维磁通门智能磁场变送器(如图5(f)所示)尺寸小、稳定性高、可靠性高,且易于集成。上述磁探测仪主要技术指标如表4 所示。

图5 水下磁探测仪Fig.5 Magnetometers for underwater detection
磁异探测信号处理是磁异探测的核心技术之一,信号处理需要排除环境噪声、自身噪声和搭载平台的磁场干扰,环境噪声和自身噪声主要通过滤波技术过滤来降低干扰,搭载平台磁干扰主要通过建立模型来进行补偿。实际达到应用层面的磁补偿器包括国外AN/ASA_65 和AADC-II 数字式磁补偿器,以及国内的GB4A9 项补偿器和H/XXC数字自动补偿器等[16]。
上述磁探测仪体积较小,质量适合,若UUV负载模块有对应接口,便可将其集成到UUV 上进行水下磁异探测。
1.2.2 激光探测
大部分波段的光在海水中会迅速衰减,但是经研究发现,0.47~0.58 m 波段蓝绿激光在海水中传播衰减小,可以穿透一定深度的海水,利用这一特性,平台可搭载激光扫描仪[17],通过分析回波信号的特征,就能获得一定深度剖面下探测目标的信息。激光探测直接探测静止目标时探测范围有限,探测潜艇等运动目标时,可以通过探测航行过程中产生的可维持数小时长度延绵几公里的气泡尾流来确定目标的航行路径和位置。
1991 年,美国研制了 AN/AES-1“魔灯”激光雷达系统(见图6(a)),并成功应用在海湾战争中,在此基础上,又研制出了ML-90 蓝绿激光探潜系统,装备在反潜机上,其有效探测深度为100 m[18]。俄罗斯也配备了一种实战蓝绿激光系统——“紫水晶”系统[19],该系统可沿搭载平台的前进方向45°范围扫描,有效探测深度约30 m,有效搜索宽度为900 m。除此之外,其他多国也研制出激光探测系统,包括澳大利亚的LADS 系统,其探测精度0.3 m,最大探测深度70 m,有效搜索宽度240 m,其中LADS-HD 型如图6(b)所示[20];加拿大的LARSEN系统,探测精度0.3 m,有效搜索宽度268 m;瑞典的HAWK EYE 系统,可沿搭载平台前进方向的25°范围内扫描,探测精度0.3 m,最大探测深度70 m,有效搜索宽度250 m。成熟的激光系统制造商有加拿大的OPTECH 公司和澳大利亚的LADS 公司,上述各国激光系统均有两家公司的深度参与[21]。2015 年,中国科学院上海光机所研制出机载海陆测绘双频激光雷达,如图6(c)所示,其能够完成海洋、陆地一体化测绘,在等效Ⅰ类水质条件下,有效探测深度50 m,探测精度0.22 m[22-23]。
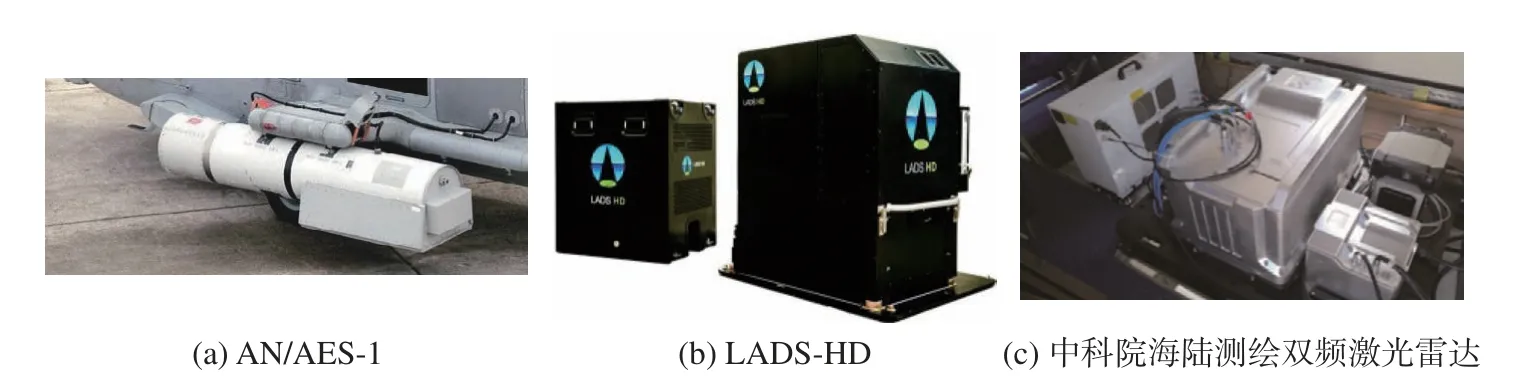
图6 激光雷达探测系统Fig.6 Lidar detection systems
目前的激光探测设备体积、质量和功耗均相对较大,无法直接集成到UUV 上,并且水下激光探测深度和范围有限,距离水下成功应用还有一定的难度和距离。
1.2.3 电场探测
水下运动目标航行时,推进轴系高速旋转会产生轴频电场,轴频电场范围0.5~30 Hz[24],线谱特性明显,适合用电场传感器来进行电场探测和识别。
电场探测的形式可以为电场探测阵列,阵列通过线缆连接,布放在海底。美国和加拿大海军已通过安装电场探测电极阵列,成功搜索到敌核潜艇位置[25],电磁相伴相生,美、俄等国均装备了利用电磁探测和攻击的海底预警监测网,如Eisenhower海底高速观测网、电磁异探测阵列、STL 水下警戒系统等[24]。美国、英国和瑞典均研制出高性能的水下电场传感器,美国AIS 公司生产了4 种型号的电场传感器[26],其中D 和M 型适用于水下潜艇监测,D 型可用直升机直接投放,防腐蚀性强。英国Ultra 公司研制的Ag/AgCl 电极传感器[27]测量精度高,测量范围可达1 mHz~3 kHz,自噪声低至1 nV/mHz1/2,如图7(a)所示。瑞典 Polyamp 公司研制的电场传感器[28]采用碳纤维作为电极材料,主要测量交流信号,范围为1 mHz~1.1 kHz,系统噪声为 1 nV/Hz1/2,如图7(b)所示。英国Subspection公司生产了多种电场传感器,其高精度电场传感器灵敏度小于1 nV/m,系统噪声1 nV/Hz1/2,其微型电场传感器灵敏度为0.1 nV/m。西班牙SEAS公司研发的SET-200/P 电场传感器,精度高噪声低,适用于反潜探测,如图7(c)所示。部分电场传感器性能如表5 所示。
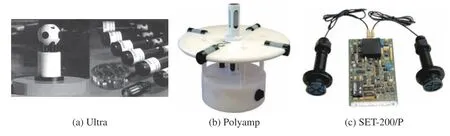
图7 水下探测用电场传感器Fig.7 Electrical sensors for underwater detection
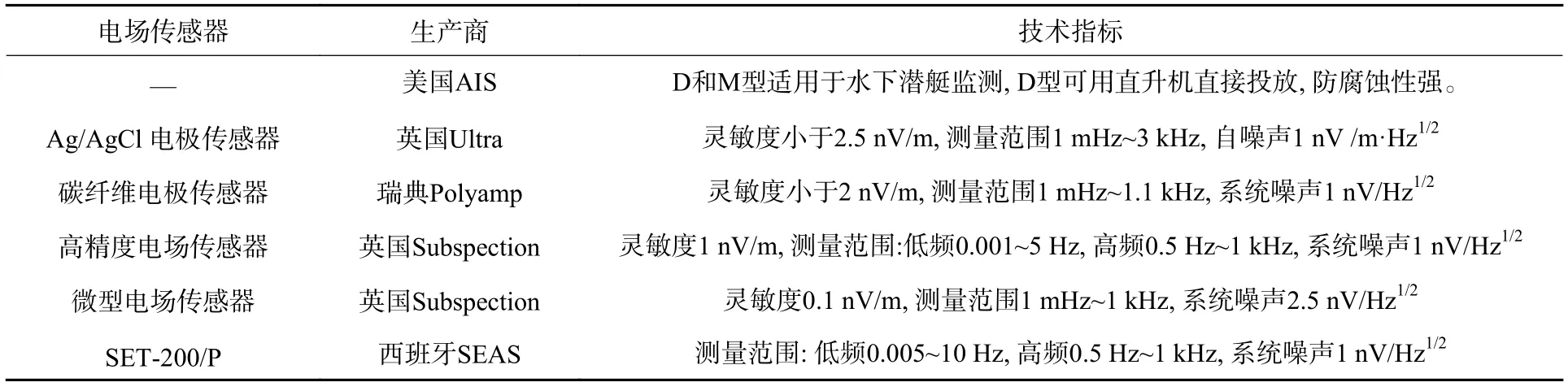
表5 不同电场传感器技术指标Table 5 Technical parameters of different electric field sensors
电场检测算法是电场探测的重要技术,常用电场检测算法有: 功率谱检测、AR 模型参数法以及模糊融合增强算法。
上述电场传感器在尺寸上适合集成到UUV上进行水下电场探测,但是水下环境噪声可能会影响探测精度,需要开发适合的滤波算法。
1.2.4 重力梯度探测
重力梯度反映重力变化程度的大小,垂直重力梯度是重力位于铅直方向的2 阶导数,对地下物质的分布及界面起伏更加敏感,具有更高的分辨率。当水下目标自身体积大、吨位重时,会影响垂直重力梯度,重力梯度仪通过测量重力梯度的变化和特征,实现重力梯度探测[29-31]。
重力梯度仪的精度达到较高水平时,重力梯度探测的覆盖范围和深度都十分可观[32]。当重力梯度仪的精度达到10-4,可在海面上100 m 发现水下深度为300 m 的潜艇,当重力梯度仪的精度超过10-6,则探测范围能够到达海面上1 000 m。
美国 Lockheed Martin 公司的旋转加速度计重力梯度仪,测量精度为7.1~8.1 E,探测范围为400~700 m[33],除此之外,还有Bell Geospace 公司的Air-FTGTM测量系统[34](见图8(a),测量精度约为5.5 E)、BHP Billiton 公司的FALCONTM 系统[35],以及ARKex 公司的 FTGeX 系统(见图8(b))。我国重力梯度仪仍处于研究探索阶段,尚无实用的成熟系统,北京航天控制仪器研究所研制了SAG 系列重力仪(见图8(c)),并进行了相关测量实验。适用于UUV 的重力梯度仪仍处于研发阶段,距成功应用还有一定距离。
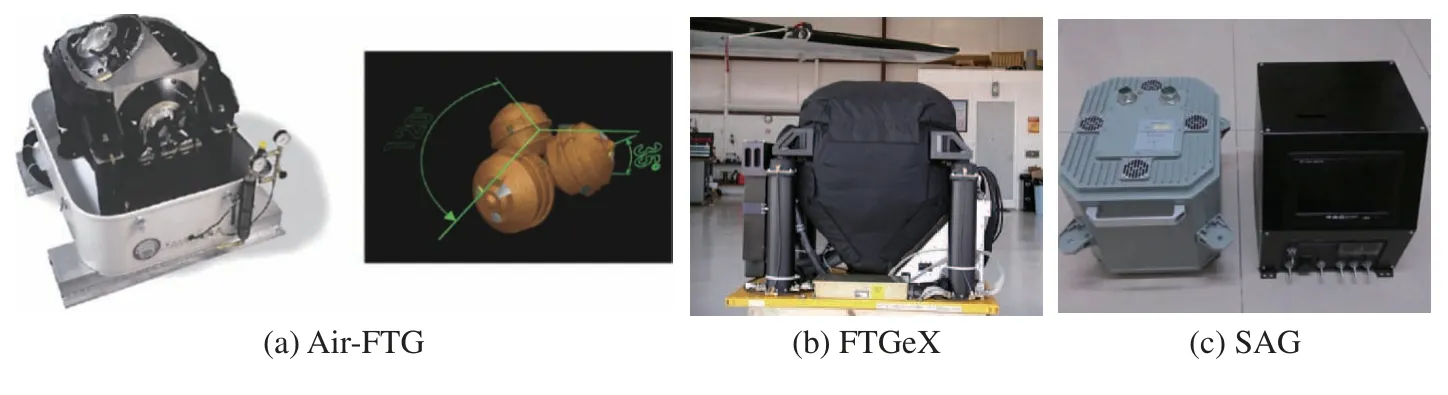
图8 重力梯度仪Fig.8 Gravity gradiometers
1.2.5 生物探测
海洋生物无处不在并与周围环境密切相关,具备随时动态监测海洋环境的潜在优势。水下生物探测技术利用海洋生物对周围环境的自然感应能力,开发监测水下运载工具的海洋生物传感器硬件设备,研究海洋生物探测到水下运载工具后所产生的生物信号或行为,并通过传感器硬件设备捕获、转译和转发,从而探测水下运动目标的行踪。
水下生物探测技术的生物信息载体可以是鱼类、虾类、发光的浮游生物以及其他海洋微生物。海洋表面和海底广泛分布着发光细菌,水下运动目标航行经过时会引起周围电磁场的变化,导致发光细菌发光强弱变化,从而形成一条荧光轨迹,此轨迹可以维持十几分钟,可通过光学传感器探测。生物探测尚处于理论研究阶段,一种可行的方法是用紫外线照射海洋表面,探测海洋表面微生物的变化来确定潜艇的行踪。海洋微生物探潜原理如图9 所示[36]。
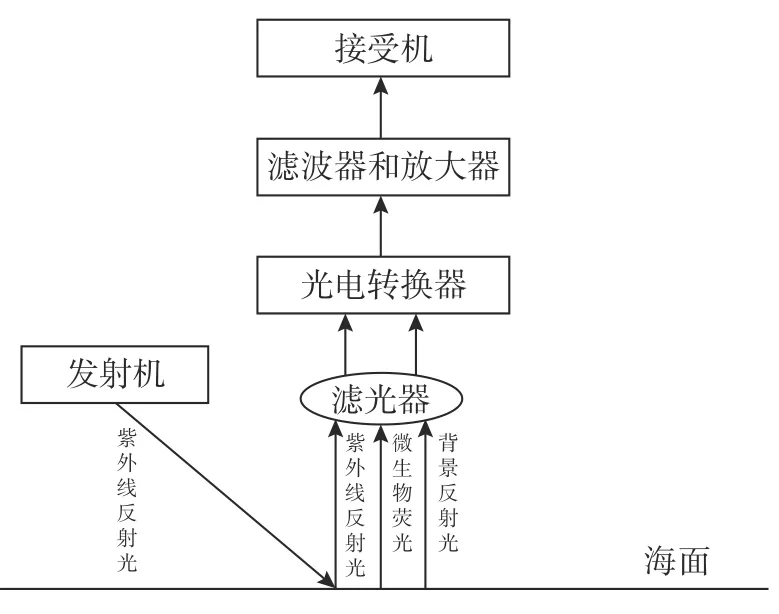
图9 海洋微生物探潜原理示意图Fig.9 Principle of marine microbial detection
美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)于2018 年11 月启动了“持续水生生物传感器”(persistent aquatic living sensors,PALS)项目,旨在开发新的能力,利用海洋环境中存在的生物探测、监测航行器(如潜艇、UUV)和潜水员。目前,PLAS 项目已经进行到第2 阶段的工作,在第1 阶段任务中,研究小组证明了海洋生物能够感知到水下航行器(各种混杂体)在其环境中的存在,并通过输出信号或其他可观察到的行为作出反应;第2 阶段,研究团队将开发人造探测器系统来观察、记录和解释这些生物体的反应,并将分析结果传送给远程终端用户。
DARPA 项目[37]资助的团队目前进行的研究包括: 诺格公司记录并分析鼓虾发光发声机制;美国海军研究实验室将微生物整合到传感器平台,探测天然微生物的生物信号,这些信号可以表征水下航行器经过时水下磁场的变化;佛罗里达大西洋大学记录分析热带和亚热带环境中歌利亚石斑鱼的声音;雷声BBN 技术公司利用鼓虾对水下航行器进行远程探测、分类与跟踪;马里兰大学环境科学中心利用传感器紧密跟踪黑海鲈鱼,追踪受水下航行器干扰鱼群的深度和加速度行为。DARPA 还资助海军水下战中心纽波特分部使用水听器阵列和声学矢量传感器,开发能持续监测珊瑚礁中生物声音的系统,该系统将分析珊瑚礁生态系统生物群自然捕食-躲避反应所辐射的声信号变化,为近实时的探测并分类水下航行器提供间接手段。
2 技术要点和发展方向
2.1 UUV
1) 提高负载能力和模块化程度
UUV 受自身质量和体积的限制,负载能力有限,可搭载的任务传感器也有限,在结构设计上,通过使用新型轻量化复合材料(碳纤维复合材料、玻璃纤维复合材料等)、新结构来减轻平台质量,包括结构轻量化设计技术、结构多目标优化设计技术、新材料结构加工工艺技术等[38]。也可以通过研制大型或超大型UUV 来增加平台的负载能力[39],提升UUV 对不同任务传感器搭载集成能力和不同环境的适应能力,拓宽探测范围,提高探测效率。
UUV 向着模块化、标准化和集成化方向发展,采用模块化设计思路,研发具有可进行功能扩展的连接结构,在实现模块化连接结构的基础上进行基本模块和扩展模块的设计。可根据所执行任务加载不同任务模块,增强系统和结构的兼容性,便于进行重组重构和任务扩展[39]。
2) 提高信息处理能力
UUV 承担着水下信息综合处理与存储的任务,信息处理结果直接影响水下探测准确度。
水下环境复杂,存在着各种各样的干扰信号,平台本身也存在自噪声,其中AUV 推进器的噪声是平台自噪声的主要来源。使用无轴泵喷推进可以有效降低空泡噪声和气蚀的影响,一定程度上降低自噪声。AUG 则依靠浮力驱动,自身噪声相比AUV 大幅减小。
UUV 可以携带多种任务传感器,要求平台具有处理不同来源数据并融合的能力。不同的传感器数据具有不同的工作范围、分辨率和时空排列,需要UUV 具有强大的校准算法[40]。合作感知是水下研究中新出现的技术,可以有效快速地完成海底测量、测绘或三维场地重建等任务,合作感知可以为水下传感设备提供一种新的分配策略,此类系统的主要瓶颈是其通信协议,取决于距离和带宽等因素。
3) 提高导航定位能力
导航与定位为UUV 提供准确的位置、速度和姿态信息,是其开展水下探测任务的基础[38]。目前UUV 导航的技术难点在于无法实现长时间大深度下的精确导航,随着时间的推移,目前主要的导航方法(惯性导航、声学导航、地球物理导航和组合导航等)都会有累积误差,无法避免,需要充分综合不同导航的优势,利用智能算法融合多导航源信息,降低累积误差,实现长时间大深度下的高精度导航。
4) 提升单机整体的智能化水平
提升UUV 单机的智能化水平是支撑未知复杂环境下的目标精准探测、提升作战能力的基础,需持续发展智能环境感知技术、智能自主决策技术、故障诊断与容错控制技术等,进而大幅度提升面向水下目标的探测作业自主性、自适应性和智能性。
2.2 非声探测技术
1) 提高非声探测传感器的测量精度
目前非声探测传感器的实际有效作用范围在百米内,作用距离近、精度不高。需进一步提高传感器灵敏度、稳定性和信号处理能力,并降低其自噪声,从而提高非声探测传感器的测量精度和有效作用范围。
2) 发展小型化低功耗非声探测传感器
UUV 动力能源通常是化学电源,受限于UUV的尺寸、可靠性等要求,其能源装载量受到极大的限制[41],发展低功耗非声探测传感器可以降低整体能耗,最大程度地扩大可探测时间和范围。
3) 加强对探测目标的特性研究
潜艇是水下非声探测的主要目标之一,加强对潜艇的各种非声物理场的特征研究,如潜艇磁场特性研究需建立潜艇磁场数学模型,潜艇电场特征研究需建立其电场模型,进行数模预报及评估方法研究等[19]。
4) 探索非声探测新原理和新方法
目前的非声探测技术均有其缺点和局限性,积极探索新的非声探测原理和方法,可为提升水下目标探测能力提供关键技术支撑。
2.3 水下目标探测网络的构建
单UUV 探测能力有限,发展多类水下航行器组网探测可以扩大探测范围,提升探测准确度。多类水下航行器组成水下监视和侦查网络,根据环境匹配最优分布策略,实现对特定海域的水下警戒。单一平台和单一技术均有其局限性,未来水下目标探测的发展趋势是构建天、空、水面、水下分布式协作网络,扩大覆盖范围,将多种探测技术相结合,不同距离采取不同的探测技术,充分发挥不同技术的优势,从而提高探测准确度。
3 结束语
海洋是国家安全的重要屏障,也是我国经济可持续发展的重要战略空间,国家之间未来的博弈点也必定会来自海洋。如何对水下环境中的目标“看得清、认得准”是维护海洋权益的基础。水下探测技术势必会成为新热点。单一依靠声波信息进行水下目标探测的技术已不再具有普适性,光、电、磁等非声探测技术已逐步显示出优越性。发挥UUV 的航行范围广、下潜深度大、作业灵活等优势,搭载光、电、磁等非声探测传感器开展的目标探测已逐步成为新的发展和应用方向。通过发展基于UUV 的目标非声探测技术,有助于构建天基、空基、水面、水下及海底的综合目标监测系统,可大幅提升我国认识海洋的能力,进而为海洋强国战略的实现提供重要技术支撑。