水下电场测量技术研究综述
2023-09-08罗贤虎苏建业邓显明
陈 凯 ,罗贤虎 ,苏建业 ,孙 珍 ,田 稷 ,邓显明
(1.中国地质大学(北京) 地球物理与信息技术学院,北京,100083;2.广州海洋地质调查局 自然资源部海底矿产资源重点实验室,广东 广州,511458;3.大连测控技术研究所,辽宁 大连,116013;4.中国科学院南海海洋研究所 中国科学院边缘海与大洋地质重点实验室,广东 广州,510301;5.自然资源部第二海洋研究所 自然资源部海底科学重点实验室,浙江 杭州,310012)
0 引言
水下电场测量技术借助高灵敏度电场传感器观测水下电场分布,经信号处理获取电场特征规律。根据应用场景的不同,水下电场测量技术面向不同的场源观测,水下目标电场检测面向电磁隐身、水下目标识别等国防领域;地球物理领域的海洋可控源电磁场和大地电磁天然场源,应用于如油气、天然气水合物、多金属硫化物和淡水等资源勘探,以及洋中脊、海底火山及俯冲带等深部地质构造研究;运动海水感应电场面向物理海洋领域的水体研究。以上应用均建立在高精度水下电场测量基础上,因此水下电场测量技术一直是相关领域的基础、前沿和热点问题。水下电场测量技术至今发展近2 个世纪,取得了长足进展,在诸多领域得到广泛应用。文中旨在综述水下电场测量技术,概括其发展历程,介绍其相关的电场传感器、放大器、测量设备、观测方式以及信号处理等关键技术,列举了多个代表性的应用案例,并总结了当前的存在问题,展望了未来发展趋势。
1 技术发展历程
水下电场(海洋中的电场)场源主要来自以下5 个方面: 1) 良导的海水在地磁场中运动产生的感应电动势,用E=V×B表达(其中V为海水速度,B为磁感应强度);2) 天然场源大地电磁(magnetotelluric,MT)信号,为太阳风高能粒子流与地球磁层相互作用,在海底产生的感应电场;3) 局部电位异常,由海底矿体与海水的电化学反应产生;4) 海洋生物产生的电性异常;5) 近岸工业、钻井平台、海底构筑物以及船舶等人文活动引起的电场。
水下电场测量研究最早可追溯到1832 年,Farady 研究电磁感应现象,在泰晤士河岸两侧借助电话线测量运动水体引起的电磁感应信号,但受限于当时测量技术,并未获得可靠的数据。1851年,Wollaston 在英吉利海峡借助海底电缆观测电场信号与海水潮汐周期相同变化。1920 年,Young等[1]论证了借助船尾拖曳电极测量运动海水电场的方案。
Cox 等[2]于1971 年尝试了在海底开展MT 观测,电场测量极距达1 km,并研究了磁暴期间的海底电场特征。长极距的电极定位困难导致应用受限,催生了短极距、自容式采集的海底观测仪器。短极距条件下对观测传感器以及测量电路提出高要求,早期电场观测借助盐桥实现[3]。1985 年,在岩石圈及软流圈电磁探测计划(EM sounding of lithosphere and asthenosphere beneath,EMSLAB)的支持下,工区覆盖从Juan de Fuca 海域到Cascade 海域,投入了40 台海底电磁接收机以实现海底MT观测,旨在开展俯冲带板块深部构造研究[4]。而后在1986 年,Cox 等[5]论证了可控源电磁探测与海底以下介质电阻率的方案,开创了可控源电磁方法先河。1998 年,Constable 等[6]根据浅部油气勘探需求,升级了AgCl 电极制备工艺,开发了低噪声斩波放大器,在San Diego 外海水深约为1 km处获取了高质量的MT 信号,验证高频至3 s 的测量能力。2002 年,Key 等[7]在东太平洋海隆9°50′N 开展MT 测深,获得了深部岩浆房电性结构。
2002 年,挪威国家石油公司、英国南安普顿大学和美国Scripps 海洋研究所联合开展了已知油气田的可控源电磁探测试验,试验结果大幅推动了可控源电磁方法的工业化、商业化进程[8]。而后,挪威EMGS 公司成立,在全球开展了大量的海洋可控源电磁商业勘探活动[9],挪威PGS 公司也推出其拖曳电磁勘探系统[10],使水下电场测量技术在油气勘探领域得到广泛应用。同时,日本研究机构也先后研发了面向水合物调查的海底电阻率探测系统[11]、硫化物自然电位测量装置[12]以及浅水型MT 观测仪器[13]。
在国内,中国地质大学(北京)率先开展水下电场测量技术研究[14],与广州海洋地质调查局、中南大学、同济大学以及吉林大学联合开展了海底MT 技术研究,研制了国内首套海底MT 仪器。后续在海域水合物及深水油气勘探需求推动下,又研制出国内首套海洋可控源电磁探测系统,完成首条可控源电磁剖面研究[15],并多次服务于水合物及油气勘探任务,在水下电场测量相关的传感器、测量装备和数据处理方面取得了一定的成果。中国海洋大学、中石油东方地球物理公司等也相继开展了大量与水下电场测量相关的传感器[16]、观测仪器[17]、数据处理[18]以及多学科应用研究[19]。
在国防应用领域,对水下电场主要源自对潜低频通信与水下目标探测需求。舰船电场已成为探测设备和引信装置新的“信息源”,自20 世纪50、60 年代起,国外就积极开展目标电场特性的研究[20]。前苏联在20 世纪50 年代末研发了非触发反潜锚雷,70 年代在此基础上研发了水下电势电场水雷,利用潜艇电场信号进行探测。西班牙SAES公司在20 世纪90 年代末开发了水下多感应测试系统,该系统搭载了SET-200/P 电场传感器,近年来该公司研发的MINEA 引信水雷更是搭载了三轴电极阵列实现对海水中的电场信号测量,目前国外新研发的水雷普遍增加了水下电场引信[21]。美、俄等国均开展了海底预警监测网计划,其中电场信号是重点监测特征之一[22-22]。
随着对入侵目标水下电磁特性认识的深入,基于水下电场的目标探测技术也得到发展。目标船体和桨等都是由金属制作,腐蚀防腐电流、内部推进系统的转动和船的运动都会产生电磁场。当舰船通过探测线阵的上方时,电场传感器或者磁场传感器接收到舰船的电磁场信号,这一信号被送到岸上进行处理和显示后可以对入侵目标给出报警信息。基于电场和低频电磁场的探测手段,可以对抗具有高效消磁能力的目标。海军工程大学龚沈光团队[23-25]在水下目标电场探测与识别方面开展了大量的研究工作,推进了水下电场测量技术在国防领域的发展。
当前海上电磁环境愈发复杂,且目标电磁隐身技术不断发展,水下目标的电磁探测难度也愈发增加。为拓展探测范围、提升目标识别能力,多物理场、多探测手段相结合,多节点互相配合和网络化分布式监测成为趋势,并亟需在探测方法、核心传感器、观测装备和信号处理等方面进行创新升级。
2 测量装备
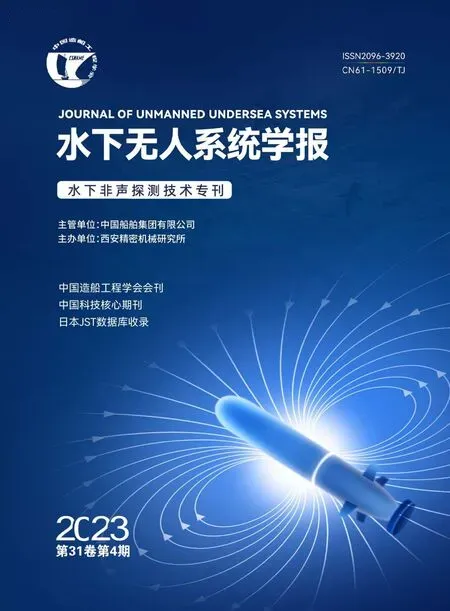
电场传感器用于实现水下电场高精度测量,其常见观测方式是在2 个空间位置布置传感器,计算2 点电势差与极距的比值即为电场强度。从材质区分,现有水下电场传感器主要分为金属/难溶盐金属(如银/氯化银)[26]和碳纤维(carbon fiber,CF)[27]。其他新材质也有体现,如镍基氧化物[28]、钽/氧化钽电极[29],各材质电极原理及优势对比见表1。
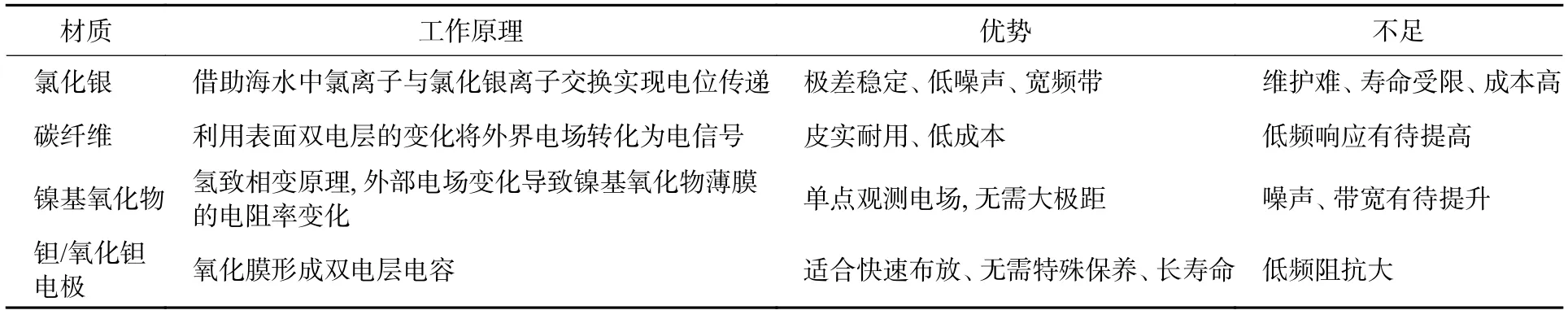
表1 各种水下电极原理及优势对比Table 1 Comparison of principles and advantages of various underwater electrodes
2.1 Ag/AgCl 电极
Ag/AgCl 电极属于金属/难溶盐电极,主要由金属(Ag)、难溶盐(AgCl)以及与难溶盐具有相同阴离子(Cl-)的可溶性盐溶液组成。Ag/AgCl 电极在海水中存在Ag/AgCl/Cl-两个相界面,主要由金属Ag、固体AgCl 和含有可溶性氯化物的电解液组成。金属阳离子参加氧化还原反应,而阴离子只在固/液界面进行溶解和沉积(生成难溶盐)[30]。电极处于平衡状态时,氧化反应和还原反应速度相等,电极净反应速度为零,反应可表示为
AgCl 电极制备工艺主要有电解法和粉压法2种,电解法的关键点在于为Ag 片镀上一层AgCl;粉压法的重点在于较大的AgCl 粉末压铸成型后的大比表面积。以电解法工艺制备AgCl 电极为例,结构见图1,电极由Ag 片、AgCl 缓冲物及外部的多孔管防护罩、水密接插件组成。制备AgCl 电极时,将电极作为阴极,通以恒定电流,为Ag 片镀上一层致密的AgCl,实物照片见图2。经测试,电极对的本底噪声水平可低至0.6 nV/rt(Hz)@1 Hz(结果见图3),电极对阻抗约为5 Ω@10 Hz,典型极差小于±200 μV,极差漂移小于10 μV/d(结果见图4)。

图1 AgCl 电极结构Fig.1 Structure of AgCl electrode

图2 AgCl 电极照片Fig.2 Photo of AgCl electrode

图3 电极噪声功率谱密度测试结果Fig.3 Noise power spectrum density test result of electrode

图4 多电极极差漂移测试结果(编号A~I)Fig.4 Potential drift test result of multiple electrodes (No.A–I)
Ag/AgCl 电极存在维护过程难(需要避光保存、持续浸泡在盐水中)、不便于运输、寿命短(3~5 年)及成本高等不足。
2.2 CF 电极
CF 电极是一种含碳量在90% 以上的纤维状碳材料,利用表面双电层的变化将外界电场转化为电信号,通常利用电极的可极化性质,电极电位对表面电荷密度比较敏感。CF 电极由多根细碳纤维经过物理化学表面处理,其化学性质呈惰性,相比Ag/AgCl 电极具有皮实耐用、成本低、存储条件简易以及使用寿命长等优势,在水下电磁探测领域表现出极大的潜力。但其稳定性差,自噪声较高,而且存在较大的低频容抗,使其灵敏度降低,难以适用于低频微弱信号探测领域。
瑞典国防科研院所研制的CF 电极由一种常用的纤维(TORAY T300)制成,表面积质量比为0.5 m2/g,该电极由大约120 万根纤维组成,单根直径为7 μm,长度为20 cm。将纤维束所有纤维与外部金属线进行电气连接,并用环氧树脂灌封保证连接点的水密。此后,在溶剂中洗涤纤维束,用于去除多余的软性环氧涂层,留下清洁的表面,以便与海水接触,传递电场信号。
CF 呈电容特性,电极易极化,导致电极电位不稳定。对CF 进行表面处理可有效改善电极特性。常见的处理方法包括表面热处理、纳米处理、生物酶、表面活化处理和CF 纸。研究表明,在清洗工艺的基础上,将CF 在马弗炉的高温(445,465,485 ℃)保温4 h,静止冷却至室温,用蒸馏水清洗后自然风干待用[31],结果表明,热处理温度的升高能显著提高电极在海水中的电位稳定性、抗极化性能及电极自噪声稳定速度。
瑞典Polyamp 公司生产的PA3001 型CF 电极(见图5(a)),尺寸为D50 mm×H125 mm,工作寿命达5 年以上,最大作业水深500 m。海军工程大学申振等[32]利用聚丙烯腈CF T300 制备了电容型电极(见图5(b)),并研究了热处理对电极的性能影响,自噪声约为1 nV/rt(Hz)。中国海洋大学付玉彬团队[33]研究表明水合肼高温掺氮改性CF 有望提高其电化学性能和电场响应性能,工作频段拓展到1 mHz。
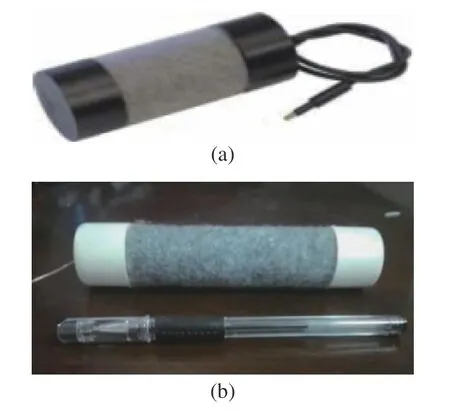
图5 典型CF 电极Fig.5 Typical CF electrodes
2.3 镍基氧化物电极
基于稀土镍基氧化物的水下电场传感器主要通过探测海洋中低频电场触发镍酸钐(ReNiO3)氢致相变所引起的电阻率变化来感知电场强度[34]。ReNiO3是一种钙钛矿结构的稀土族镍酸盐,属于具有强电子关联的量子材料。模仿海洋生物的电场感知原理,在海水环境的电场作用下,H+进入镍酸钐晶格,形成氢化镍酸钐。这种质子流导致镍原子的三维轨道电子构型发生变化,电阻特性极大改变,产生了强烈的莫特-哈伯德电子间作用,使材料从金属转变为绝缘体。
相比于Ag/AgCl 电极,基于ReNiO3仿生电极直接测量的物理量为电阻变化而非电位差,因此受海水湍流等干扰程度较低,更适用于移动平台装载下的水下电场探测。区别于传统测量2 个空间位置的电位差获取电场方法,该仿生电场传感器无需长极距配置,大幅压缩了测量设备的体积,且无需特殊维护保养,提升了仪器海上作业效率,更适用于局部电场的阵列观测场景。
镍基氧化物薄膜电极单轴方向结构见图6,3 个正交的电极组成微型3 轴电极。主要包括镍酸钐薄膜、陶瓷衬底、激励恒流源以及斩波放大器等,在待测电场Ex的垂直方向施加微弱激励恒流源I0,垂直电流方向的电阻Rx随待测电场Ex变化,斩波放大器将Rx变化量转换为电压Ux输出。

图6 镍基氧化物薄膜电极Fig.6 Principle of electric field sensor with nickel-based oxide film
相比于Ag/AgCl 水下电极,基于ReNiO3仿生电极的直接测量物理量为电阻变化而非电位,区别于传统的借助大极距获取电位差间接计算电场的方法,具有单点高精度、免维护和小体积的优势,有望对水下电场测量带来革命性的创新。
2.4 斩波放大器
水下电场信号观测频段一般为DC~100 Hz,传统的低噪声放大器(如OPA211、LT1028)低频段存在明显的1/f噪声,斩波自稳零放大器(如ADA4528、CS3301)低频噪声平坦但本底噪声仍较大(大于5 nV/rt(Hz)@1 Hz)。分立元件搭建的斩波放大技术受限于斩波开关注入电荷噪声影响,超低频(0.1 mHz~0.1 Hz)噪声还有待进一步改善[35-36]。
针对水下微弱电场信号观测,借鉴了基于低注入电荷噪声的斩波放大技术[37]。斩波放大器基本原理见图7,主要包括调制电路、变压器耦合电路、一级放大电路、二级放大电路、解调电路以及三级放大电路等单元。在一级与二级放大电路之间嵌入注入电荷噪声抑制电路,设计脉冲开关信号(图7 中红色为脉冲信号)抑制开关噪声,实现低开关电荷注入,降低放大器本底噪声水平。在解调电路前设置脉冲开关,即将开关噪声较大的时刻断路,仅通过开关噪声较小的部分,使得开关噪声不再传递至下一级,有效降低低频1/f噪声,显著提升超低频段电场信噪比。从低注入电荷斩波器放大器与传统的斩波放大器噪声对比结果看(如图8 所示),超低频段噪声得到明显抑制,超低频段噪声均低于1 nV/rt(Hz)。
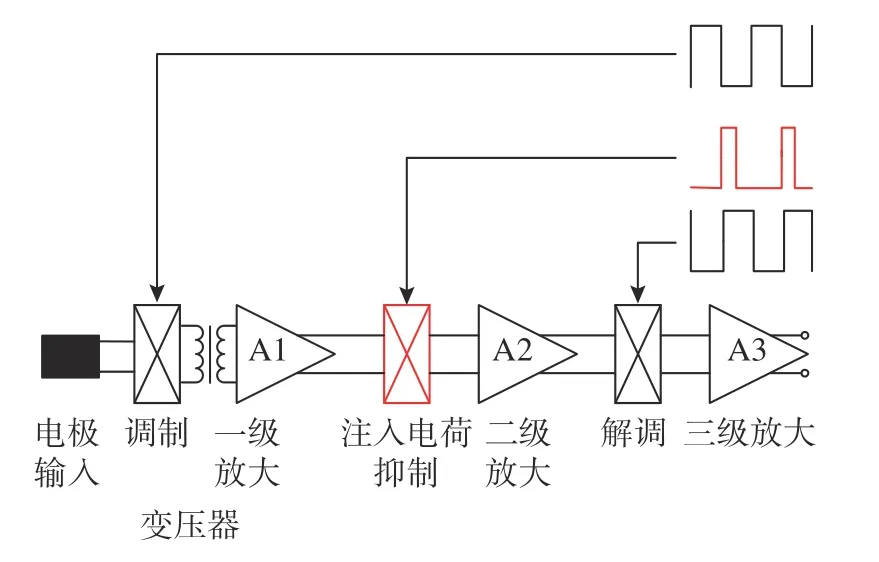
图7 斩波放大器原理框图Fig.7 Principle of chopper amplifier

图8 低注入电荷斩波放大器与传统斩波放大器噪声功率谱密度对比曲线Fig.8 Noise power spectrum density curves of chopper amplifier with low injection charge and traditional chopper ampllifier
3 测量平台
水下电场观测设备根据应用场景需求,按作业方式主要分为海床基(含海底观测网)、拖曳阵浮标和无人水下航行器(unmanned undersea vehicle,UUV)平台等,各类型平台应用场景与优势对比见表2。

表2 不同平台电场测量应用场景对比Table 2 Application scenarios of electric field measurement on different platforms
3.1 海床基平台
以海底电磁接收机为代表的海床基平台,常用于海底电磁信号静态测量。通常安装电场和磁场传感器,以实现电磁信号自容测量。图9 罗列了6 种海底电磁接收机,分别来自美国加州大学圣地亚哥分校Scripps 海洋研究所(Scripps Institution of Oceanograpy,SIO)MK-IV型(见 图9(a))[38]、挪威EMGS 公司RX4 型(见图9(b))[39]、英国UE 公司产品(见图9(c))[40],以及国内中国地质大学的OBEMIII 型(见图9(d))、中国海洋大学和重庆地质仪器厂相关产品(见图9(e)和图9(f))。美国Quasar 公司生产的小型海底电磁接收机Qmax EM3[41]是当前小型海底电磁接收机的优秀代表,采用电容电极技术,无需电场测量臂,整机体积仅约D1 m×H0.9 m。中国地质大学(北京)最早于2017 年开展了小型电场接收机的研制[42],受限于功耗水平与浮力,尚不具备磁场测量能力。

图9 海床基电场观测设备Fig.9 Seafloor electric field observation equipment
在海底MT 探测需求驱动下,针对现有海底电磁接收机存在的外围尺寸大、电源功耗大以及制造成本高等问题,广州海洋地质调查局联合中国地质大学(北京)启动了小型海底电磁接收机(micro ocean bottom electro magnetic receiver,MicrOBEM)的研发工作[43],着力针对小体积、低功耗和低成本方面开展研究工作。采取了如下方案: 1) 小体积层面,与笨重且昂贵的传统声学释放器相比,集成了水声通信模块及外置的电腐蚀脱钩器的方案,所需浮力大幅降低,玻璃球数量由原有的4 个减至1 个;2) 低功耗层面,新研制的低功耗采集电路和前放电路,整机功耗约至500 mW(感应式线圈配置),为原来OBEM-III 的1/3,功耗的降低节省了电池数量进而减少浮力需求;3) 低成本方面,无需传统声学释放器,减少玻璃球数量,整机硬件成本降低一半;4) 具备磁通门传感器扩展功能,为长周期MT 测量奠定了基础,配置磁通门传感器时,整机功耗仅为200 mW;5) 开发了回收信标,集成LED模块,方便夜间回收打捞,进一步提升海上作业效率。
MicrOBEM 实物图如图10 所示,主要包括玻璃浮球、数据采集舱、感应式磁传感器舱、磁通门传感器舱(选装)、电极测量臂、电场传感器、水声换能器、框架、水泥块、水密电缆、电腐蚀脱钩器以及信标浮球等。其中玻璃浮球用于提供浮力;数据采集舱内置采集电路和水声通信模块;感应式磁传感器舱内置感应线圈,实现水平磁场分量测量;磁通门传感器舱内置磁通门传感器,实现3 轴正交磁场信号测量;4 支测量臂和电场传感器实现电场分量测量;水声通信板、换能器和电腐蚀脱钩器组成设备的声学释放单元;各个电气单元之间通过耐压水密电缆相连;信标浮球用于打捞时的位置指示,提升打捞效率。

图10 MicrOBEM 小型海底电磁接收机实物图Fig.10 Photo of MicrOBEM
3.2 拖曳阵平台
海床基平台具有隐蔽布放、水下长期观测的优势,但也存在无法实时传输数据、丢失风险等不足。结合浅水油气高分辨率勘探需求,挪威PGS公司开发了Towed EM Streamer 拖曳电磁探测系统(见图11)[10],类似于海面多道地震拖缆,在船尾布放电偶源,源偶极矩为800 m&1 500 A,接收拖缆在水面以下约100 m 处测量地层电磁响应,收发距0~7 700 m,拖曳速度4 kn,获取油气目标区地层电阻率模型。该系统具有横向分辨率高、作业效率高和实时数据质量控制的优势,在油气勘探任务中得到广泛应用。不足在于目前仅适用于浅水作业。
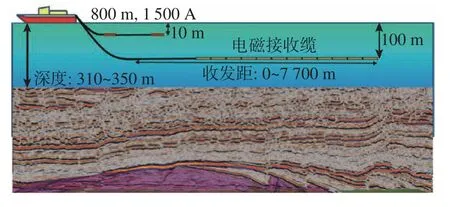
图11 挪威PGS 公司的拖曳电磁探测系统Fig.11 Towed electromagnetic detection system from PGS,Norway
美国SIO 针对浅部水合物探测需求,开发了深拖可控源电磁探测系统(见图12)[44],在发射源拖体尾部接入4 个3 轴电场测量节点,收发距位于500~1 200 m 之间,单个节点安装有6 个AgCl 电极,极距为1 m 和2 m,近海底拖曳过程中测量人工场源电场信号,获取浅部水合物目标区的电性结构。

图12 美国Scripps 海洋研究所的深拖可控源电磁探测系统Fig.12 Deep towed electric field measurement device from SIO,USA
针对我国海域深水油气勘探任务需求,中国地质大学(北京)联合广州海洋地质局等单位在“十三五”重点研发计划项目的支持下[45],开发了双船拖曳可控源电磁探测系统,区别于现有技术方案,发射源与接收机分别由2 条船各自拖曳,收发距、方位可调,旨在提升探测深度与精度[46],拖曳接收机测量节点实物图见图13,借助以太网将多个节点串联,实现供电、通信和时间同步,单个节点测量3 轴正交电场、磁场,并实时获取离地高度、深度和3 轴姿态等信息。
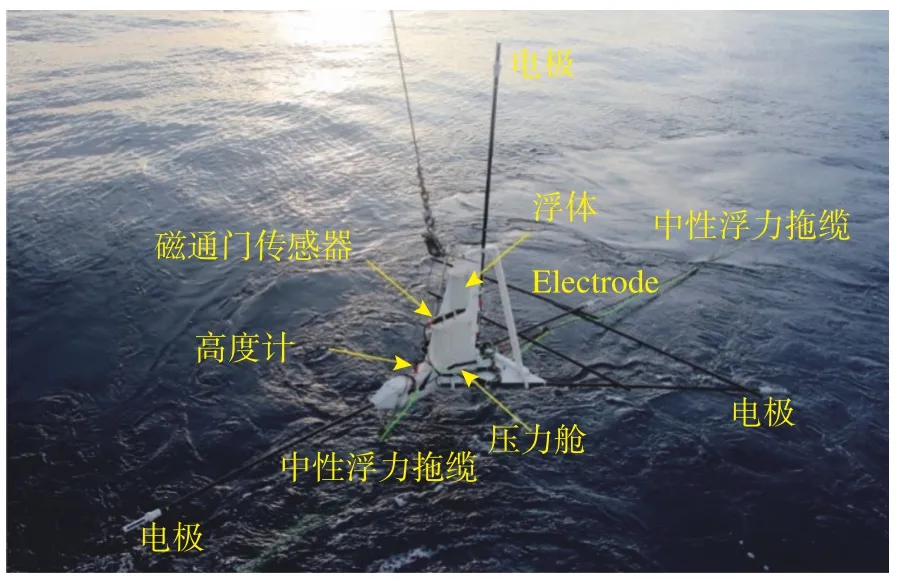
图13 中国地质大学(北京)的拖曳电场接收机测量节点Fig.13 Towed electric field receiver measurement node from China University of Geosciences (Beijing)
3.3 浮标平台
针对水下目标探测应用场景,浮标平台的电场探测主要包括以下2 类: 1) 敏感海域舰艇航行轨迹预判监测;2) 重要海域长期值守监测[47-48]。预判监测是基于情报信息和所测海域内的海流变化,预判舰艇航行路线,并计算浮标在海水中的运动速度,提前将浮标空投至指定位置,浮标入水后进入采集状态,获取经过附近的舰艇电磁目标特性;重要海域长期值守是将浮标布放在舰艇经常出没的海域,平常处于低功耗值守状态(如图14 所示),当发现目标时启动数据获取装置,采集目标电磁特征数据,分析提取结果并及时将数据发送回指挥中心。

图14 浮标平台电场探测装置工作示意图Fig.14 Buoys for electric field detection
美国ISL 公司从最初研制的海床基电磁探测传感器,到系绳式电场测量浮标,后来发展为空气投射浮标,逐渐向小型化、便携式发展。其研制的电场浮标见图15(a),探测频率为0.5~30 Hz,探测半径达800~2 000 m。美国Quasar 公司的Aphros电场浮标(见图15(b))采用干式电极[49],极距1 m,噪声优于1 nV/m/rt(Hz)@1 Hz,克服了现有AgCl电极维护难的局限性,具有快速布放、低噪声、低功耗以及低成本的特点。海军工程大学研制的电场浮标装置可获取不同深度的天然场源电场分布特征[50](见图15(c))。
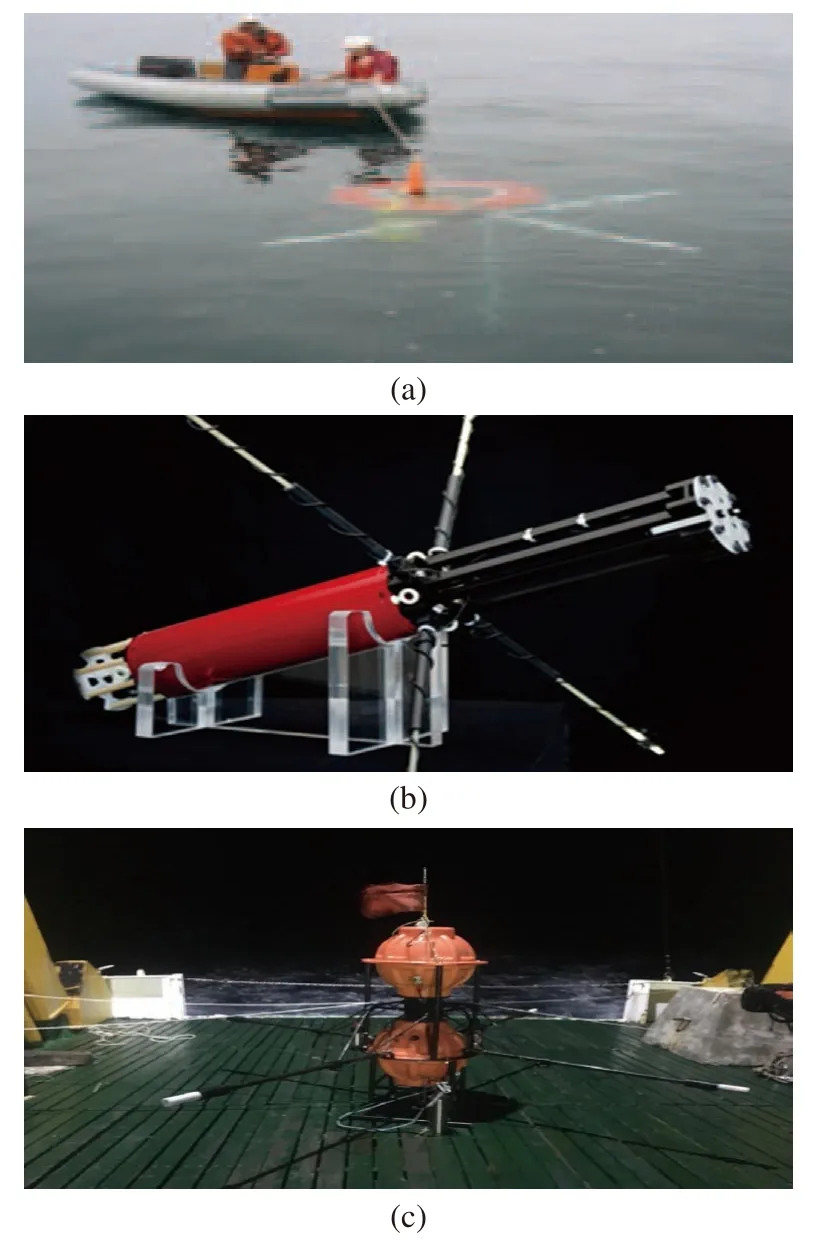
图15 典型电场浮标Fig.15 Typical electric field buoys
电磁浮标[51]水面部分主要包括发射天线、定位系统、浮体和电子舱等(见图16)。电磁浮标水下部分主要包括减振弹簧、阻尼器、姿态传感器、高灵敏度磁场传感器、配重铅块和电场传感器支架等。

图16 电磁浮标结构示意图Fig.16 Structure of electromagnetic buoy
3.4 UUV 平台
UUV 平台与上述的海床基、拖曳阵和浮标平台相比最大的优势在于可自主移动观测,自主性更强。通常将电场探测装置搭载在自主水下航行器(autonomous undersea vehicle,AUV)或水下遥控航行器(remote operated vehicle,ROV)上实现移动测量。
2015 年,美国爱达荷大学开发的AUV 平台水下电场探测装置(见图17(a))[52],在AUV 平台头部安装3 轴AgCl 电极,极距约为3.81 cm,电极直径为2 mm,旨在开展水下目标轴频电场探测。2018年,美国SIO 针对海底硫化物探测需求[53],在AUV平台安装了6 支电场传感器(E1~E6)(见17(b)),实现3 分量自然电位测量,并在冲绳热液硫化物区成功验证。自然资源部第二海洋研究所针对西南印度洋硫化物调查需求[54],于2020年对潜龙二号AUV 平台进行了改造,分别在AUV 的尾部、两侧及顶部安装了电场传感器与采集装置,6 个电场传感器实现正交3 分量电场观测,分别垂直方向电场EV、轴向水平分量ER、交叉水平分量ET,实现热液区硫化物自然电位异常测量(见图17(c))[55]。
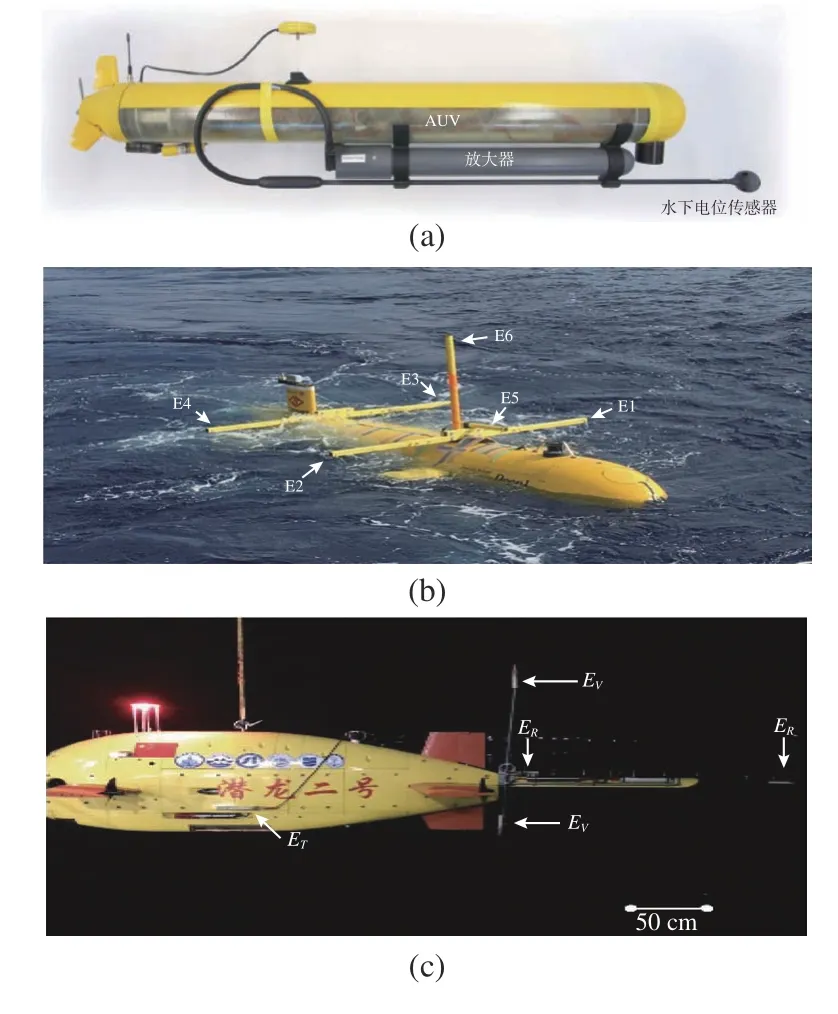
图17 AUV 平台电场测量Fig.17 Electric field measurement on AUV platform
4 信号处理方法
水下电场测量过程中,不同的应用场景对信号与噪声的定义不同,比如MT 测深作业时,有用的信号为天然场源MT 信号,水下目标电磁特征信号被视为人工源噪声;而在水下目标电场特征信号过程中,MT 信号被视为噪声,需要借助滤波器抑制。地球物理电磁勘探过程中,MT 和可控源电磁方法的数据处理过程较为成熟,限于篇幅,主要介绍噪声抑制方法的最新进展。
4.1 MT 噪声抑制方法
MT 信号幅值微弱、频带宽、场源激发随机,极易受到其他噪声干扰。强干扰抑制方法一直伴随着MT 方法发展,MT 去噪方法研究至今,国内外学者提出了诸多方案,根据数据预处理过程的不同阶段可以分为以下4 类。
1) 时间序列处理阶段。蒋礼[56]借鉴地震多道叠加技术思路,将多站同步长周期MT 数据在时域或频域叠加来消除随机噪声。该方法要求测点间距不能太远,以保证测点间天然场信号相同,但难以去除强人为干扰。形态滤波法基于信号的几何特征,利用结构元素对信号进行匹配。汤井田等[57]将其应用到MT 信噪分离中,表明该方法可以精细刻画数据的主体轮廓,滤除大尺度噪声,但主要面向低频大尺度干扰抑制,去噪的同时会去除部分有用信号[58]。王辉等[59]根据卡尔曼滤波原理提出利用MT 信号时间序列依赖关系的稳定性来合成信号。该方法在具备时间足够长的本地高信噪比数据和全时段高信噪比远参考站数据前提下,能够取得较好的应用效果。
2) 频谱估计阶段。徐义贤等[60]提出基于小波分析的MT 信号谱估计方法,通过设定小波系数阈值来滤除噪声,对较强的白噪声以及局部的相关噪声有着明显的抑制效果。但该方法只能抑制小部分强噪声,如脉冲噪声。另外,小波变换的处理效果还依赖于母小波的选取和阈值的设定。希尔伯特-黄变换(Hilbert-Huang transform,HHT)是一种非线性非平稳信号分析方法,具有自适应分解信号和时频分析的优点,还可以多尺度考察信号、分离噪声[61],不足在于经验模态分解时,窗口首尾两端会引入误差,无法揭示每时段的频率特性和能量差异所具有的细微变化,且运算效率较低。景建恩等[62]采用广义S 变换进行MT 时间序列频谱分析,并采用时频比值和门槛值方法,结合时频滤波方法抑制噪声,为时频滤波方法提供高精度的时频谱,改善了MT 阻抗张量元素的统计特性。
3) 功率谱计算阶段。远参考方法借助参考点信号与本地信号相关的特点,抑制参考点与本地不相关的噪声[63]。远参考方法处理效果依赖于参考点与本地点信号之间的相关性和噪声的非相关性,实际中很难选择合适的参考距离,以保证测点之间信号相关且尽可能远离噪声。Egbert[64]提出Robust 多站处理算法,利用奇异值分解多站同步数据,判断和估算相关噪声,当参考点不含噪声或者测点之间只存在不相关的间歇噪声时,处理效果要好于远参考的Robust 估计。
4) 张量阻抗估计阶段。最小二乘法可以抑制高斯随机噪声,而对实测数据中经常存在不满足高斯分布的“飞点”噪声,易导致张量阻抗估算偏离真值。Robust 估计通过加权估计,对“飞点”具有较好的抑制效果[65],但其前提条件是有大部分可靠的数据,从而找到正确的“中值”来剔除异常值。当输入端含有噪声时,反而会加重噪声的影响。
表3 总结对比了以上方法,可知不足在于需要以足够长的高信噪比数据为前提,或者只能去除随机噪声(对相关噪声无效),或者对强干扰抑制效果有限。而面对具有持续时间长、作用范围广、能量强、频带宽及电磁分量相关等特征的运动海水电磁强干扰噪声时,以上方法都不够理想。德国海洋地球科学研究中心的Chen[66]也提出: 海底MT 测量经常受到表面波浪、过往船只对仪器的干扰,该干扰属于相关噪声,对电磁分量均有影响,传统的处理方法抑制效果有限。

表3 MT 噪声抑制方法对比表Table 3 Comparison table of MT noise suppression methods
4.2 可控源电磁噪声抑制方法
海洋可控源电磁方法面对增强电磁响应信号需求,国外同行在资料处理层面采取诸多有效措施。挪威PGS 公司针对其开发的Towed-Streamer EM 系统观测时遇到的电场运动噪声问题,在数据处理过程借鉴合成孔径思路,在Fan 等[67]的研究基础上,利用雷达领域合成孔径思想的合成源处理方法,通过对地质目标体的定向聚焦来增强来自目标体的异常,突出储层的电阻率异常响应[68],从而更好地识别高阻油气藏,展示了合成孔径方法在拖曳式海洋可控源电磁领域强大的生命力。后续的研究[69]还证实了合成孔径方法在压制空气波、抑制随机噪声和提升探测深度方面的有效性和先进性。美国SIO 针对噪声抑制问题采取的方案是延续其传统的半拖曳可控源电磁方法中的1 阶差分预白滤波技术[70],噪声改善效果有限。
国内在海洋可控源电磁噪声抑制方面开展了许多卓有成效的工作,主要归纳如下: 1) 针对空气波,于彩霞[71]利用Hilbert 变换进行有效信号分离;Zhang 等[72]采用合成源方法抑制空气波干扰,经理论分析显著提高海洋可控源电磁法对高阻油气资源的探测能力;朱忠民[73]采取合成孔径、波场分解法和反褶积干涉法增强有效信号和压制空气波。2) 针对MT 噪声,李予国等[74]采用1 阶差分预白技术减弱低频MT 信号对可控源电磁信号频谱估计的“污染”;周文强[75]分别开展了基于双对称发射波形、短时窗结合预白化滤波、稀疏分解的降噪方法研究。3) 针对海水扰动噪声,李肃义等[76]提出了一种基于小波多分辨率分析的校正方法,根据水平电偶极源发射波形与小波基特点,选取最优小波基并研究其最佳分解层数,利用最高分解层数所对应的近似序列估计出海水扰动噪声并从原始信号中去除,达到消除海水扰动噪声的目的。4) 针对随机噪声,林昕等[77]采用时域滤波和噪声估计方法,通过模拟数据验证在加入噪声时可获得有效信号的收发距离约为2 km,滤除主动噪声后的有效收发距可增加到5 km;李泽林[78]将自适应滤波技术引入海洋电磁信号噪声处理中,以抑制随机信号。
综上,国内同行研究主要集中在解决传统海洋可控源电磁探测系统所面临的空气波、MT 噪声、运动海水扰动噪声和随机噪声等方面,并取得了较好成效,但还未涉及到拖曳电场观测时所面临的电场运动噪声问题。
在面对海域油气和水合物勘探过程中的微弱异常探测、加大探测深度以及提高探测分辨率等重大需求时,拖曳式海洋可控源电磁方法遇到电场运动噪声问题,为改善数据质量、提升勘探效果,亟须采取有效措施抑制电场运动噪声。借鉴合成孔径多源聚焦提升响应信号的思路,有望增强电场观测数据信噪比,提升微弱异常识别能力,提高探测分辨率,改善海洋可控源电磁的勘探效果。
5 应用案例
5.1 水下目标探测
水下目标的电场探测主要分为探测未知目标与评估已知目标两部分,前者的典型应用场景为水下电场栅栏、鱼雷引信判别,后者为电磁隐身评价。舰船水下电场测量的结果对于舰船水下电磁隐身评价有直接意义,同时测量过程中获得的舰船水下电磁场特性对目标探测装置和系统设计也有重要价值。
中国船舶第760 研究所开发的水下电场测量系统[51](见图18),多个测量节点通过光电复合缆连接至岸站或船载甲板终端,单个测量节点集成3 分量电场传感器,极距约为20 cm,站间距约为50 m,主要用于测量已知目标的电场特征信号,为评估已知目标的电磁隐身特性提供参考。电场强度矢量测量采用短基线方式,水下测量体包含3 对电极,分别测量电场强度3 个正交分量,系统由多节点组成海底观测阵列。该方式可以测量舰船静电场和交变电场,并获取较丰富的电磁特征信息。
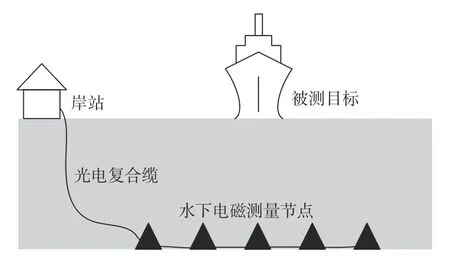
图18 电场强度动态测量示意图Fig.18 Dynamic measurement of electric field intensity
韩国科技大学[79-80]借鉴地球物理勘探中的直流电法勘探原理,在水下布设1 对供电电极,在供电电极之间布设了若干测量电极组成1 个观测剖面,实时获取剖面电阻率动态分布。当水下目标穿过测量剖面时,剖面电阻率分布发生畸变,从而实现水下目标实时监测(见图19)。
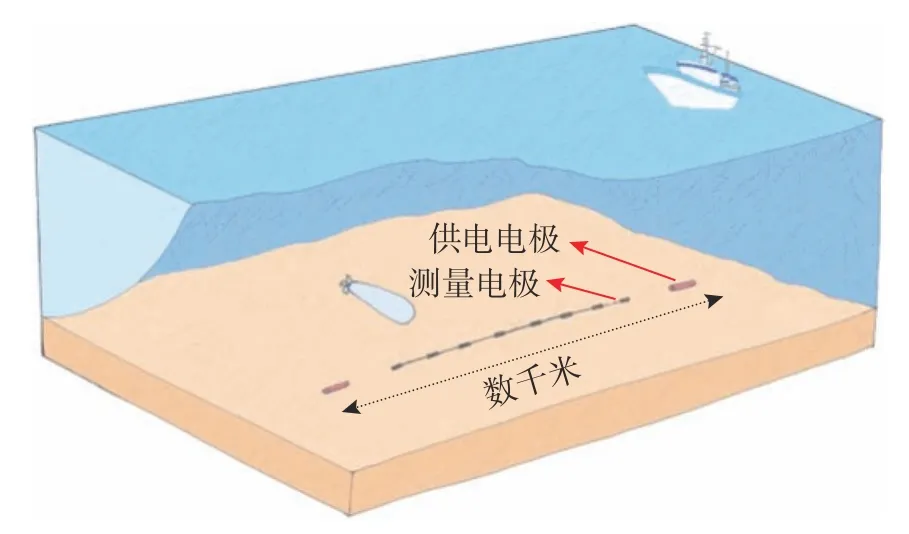
图19 直流电阻率剖面方法探测水下目标示意图Fig.19 Direct current resistivity profile method for detecting underwater targets
5.2 地球物理勘探
海洋地球物理勘探领域主要以地震方法为主,但碳酸盐岩、珊瑚礁、泥底辟等区域存在地震波受屏蔽、能量衰减严重的影响,导致地震方法难以适用[81],且存在弹性参数对高饱和度油气识别不灵敏、海底模拟反射层无法识别水合物顶界等不足;而可控源电磁方法对油气、水合物等高阻异常识别灵敏[82],可作为辅助方法为储层识别提供电性信息。
2016 年,广州海洋地质调查局联合中国地质大学(北京)在南海琼东南盆地海域开展了可控源电磁探测任务[83],布设了1 条长4.5 km、含10 个站位的剖面,水深约1 400 m,发射电流频率为0.5&1.5 Hz 组合频率,2 Hz、8 Hz 单频,峰值约为500 A。经处理反演获得了目标区的电阻率模型(见图20),图中R1~R10 为10 个海底观测站位,H1~H6 为推测的水合物矿体分布区域,BSR(bottom simulating reflector)为“似海底发射层”,用来指示水合物矿体边界,Snøhvit 和 Albatross 分别代表2 个勘探区块。结合水合物稳定带的估算与反射地震剖面资料,分析了水合物分布和游离气运移,初步给出了目标区水合物成藏模式。
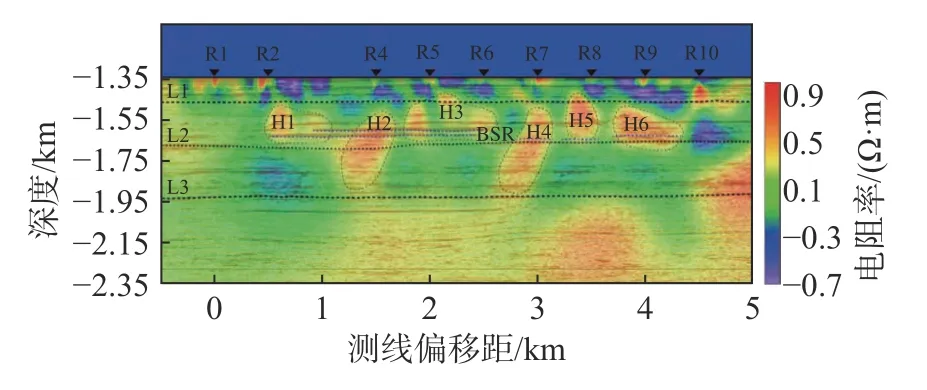
图20 琼东南海域水合物可控源电磁探测电阻率模型Fig.20 Resistivity model of hydrate in southeast sea area of Hainan Province by Controlled Source Electromagnetic detection
2013 年,挪威PGS 公司在挪威北部北海气田TWOP 海域开展了拖曳电磁探测系统的验证(见图21)[84]。工区水深为310~350 m,拖曳电磁系统数据反演得到的电阻率异常,探测深度达4 000 m,油气储层埋藏深度约为海底以下2 000 m。与先前获得地震剖面数据的水平范围、埋藏深度非常吻合,圈定了油气目标,提高了目标储层识别精度,为储层精细评价提供了电磁数据支撑。
2018 年5 月,自然资源部第二海洋研究所组织大洋49 航次在西南印度洋的玉皇海山进行了自然电位(self potential,SP)测量工作[54],旨在开展多金属硫化物调查。工区玉皇热液区位于西南印度洋中脊第29 脊段南侧,距离中央洋脊7.5 km。已有的钻孔和取样资料表明,在玉皇海山的北面出露硫化物堆积体,暂未观测到热液活动。SP 测量设备搭载在瞬变电磁仪拖体上,3 组电极等间距排列组成水平阵列,电极距5 m,用来采集电场水平分量。测量时船速1~2 kn,离底高度约40 m。原始数据经重采样、滤波后提取的SP 异常(电位梯度),见图22,热液区上方电位梯度发生变化,异常最大达-20 mV。已有钻孔在该异常西侧约100 m处见硫化物。
5.3 深部构造研究
地下岩层的电性参数(如电阻率等)能较好地反映岩石性质(如岩性、组分、孔隙度和水饱和度等),以及岩石所处的物理状态(如温度、压力、熔融和脱水等)。MT 测深是一种天然场源的方法,设备相对简便,比较容易在海洋条件下施工。该方法不受高阻层屏蔽的影响,对低阻层更加灵敏,探测深度可以达到上地幔。MT 测深在海洋深部构造研究中得到了广泛应用,是当前海洋地质热点前沿手段。
由于相互连通的部分熔融物是典型橄榄岩电导率的2 倍,因此地幔电导率增加可能主要是由少量部分熔融物引起,而较少程度地依赖于地幔温度和水合作用状态。这样的电导率差异使得MT响应对地幔部分熔融物的存在非常敏感。2013 年,美国SIO 在尼加拉瓜附近的中美洲海沟布设了1 条长280 km、含50 个测点的MT 剖面[85],从科斯板块深海盆地开始,跨过海槽,直到大陆架上,旨在研究俯冲带深部结构。MT 反演结果显示见图23(a),在高阻大洋岩石圈下面存在1 个深度在45~70 km 范围的各向异性高导层。该高导层被解释为冷的岩石圈之下的部分熔融体,可能揭示了年轻岩石圈-软流圈边界(lithosphere-asthenosphere boundary,LAB)的普遍特征;平行于板块运动方向的电阻率各向异性,揭示了LAB 可能是上覆年轻的岩石圈与下面软流圈的解耦层。该结果为认识大洋板块LAB 的性质和状态提供了关键依据。

图23 海底深部电阻率模型Fig.23 Deep resistivity model of seafloor
针对超慢速扩张脊地幔物质上涌是否对称以及动力来源这一学术界一直争议的问题,挪威科技大学联合EMGS 在北大西洋洋中脊Mohns 脊开展了可控源电磁和MT 联合探测[86],测线长68 km,含30 个测点。联合反演的电阻率模型展示了深达120 km 的电导率结构变化(见图23(b))。结果显示,在超慢速扩张脊之下,地幔物质可沿着狭窄、倾斜以及严重不对称的通道上涌,这与区域地表显示的不对称变形一致,为超慢速扩张脊的动力来源受控于慢速和不对称的板块运动提供了关键证据。
上述2 个具有代表性的工作显示出海洋电磁探测手段为认识板块俯冲和洋中脊扩张这2 个最重要的地质问题提供了不可替代的证据,推进了海洋地质学科领域发展。
5.4 物理海洋观测
根据法拉第电磁感应原理,良导的运动海水在地磁环境下会产生感应电动势,以海啸为代表的运动海水引起电磁异常可能被海底电磁测量设备所观测到。东京大学地震研究所在西北太平洋布设的4 个海底电磁站位观测到2011 年日本9.0 级地震引起的海啸电场信号(见图24)[87],各台站Ex分量幅值达1 mV/km,解算海啸传播速度为240 m/s,电场数据用于评估海啸的参数,显示海啸的波高与电场信号正相关,并估算了海啸的传播方向。

图24 2011 年日本海底地震引起的海啸电场时间序列Fig.24 Electric field time series of tsunami caused by Japan undersea earthquake in 2011
6 展望
1) 多场景应用。始终围绕国家重大科学需求,如海底油气资源勘探、海洋底深部构造地质研究以及水下目标探测等,水下测量技术更好地服务于海洋地质地球物理科学领域,成为科学研究与工程应用的有力工具、重要支撑和可靠选项。
2) 多物理场观测。水下目标的低频电磁场传播距离可以达到公里级别,同时由于交变电磁场直接关联舰艇的螺旋桨区域,通过采用多物理场(包括声、水压、磁、电以及地震波等)组合引信方式,降低单一物理场引信的虚警和漏报率。把多个传感器在空间或时间上的冗余或互补信息依据某种准则来进行组合,以获得被测对象的一致性解释或描述。信息融合即利用多个传感器共同或联合操作的优势,提高传感器系统的有效性,利用多种算法的不同优势相互结合,达到最佳协同探测的效果。
3) 全海深作业。我国四大海海域水深小于300 m的浅海面积占有较大比例,相比深远海,浅海与资源环境、国家安全更加紧密,需求更加迫切。除了向更深作业水深进发外,在浅水环境下开展电场高可靠度、高精度测量依然困难重重[13],主要体现在受浅水区运动海水干扰较大导致信噪比降低、近岸人文工业干扰大、渔业活动导致设备丢失风险高以及浅水海生物生长迅速影响设备性能等方面,当前亟需在环境适应性、抑制运动海水干扰等方面提升浅水区域作业能力。在浅水域开展构造带调查为电磁方法提供了广阔的用武之地。
4) 低成本发展。当前水下观测设备依然存在功耗大、体积大和笨重等不足,关键零部件(如水密电缆、接插件和玻璃球浮体材料等)国产化率低,导致整机成本上升及生产周期不确定,终端用户在有限的预算条件下难以开展更大规模的应用。随着国产化替代进一步提升,仪器制造成本有望下降。
7 结束语
水下电场测量技术在以油气、水合物、硫化物和淡水资源调查为代表的勘探地球物理领域,以俯冲带、洋脊、海底火山和洋陆转换带研究为代表的海底构造地质领域,以水下目标探测与识别、电磁隐身为代表的国防应用领域,以海啸、台风研究为代表的物理海洋领域等诸多学科领域得到成功应用,国内同行在测量方法理论、传感器及仪器装备、信号处理等方面均取得了长足进展,水下电场测量技术正朝向多场景应用、多物理场协同观测、全海深作业以及低成本方向发展。