旋耕刀齿式棉田耕层残膜回收机设计与试验
2023-09-07王旭峰邢剑飞郭文松
胡 灿 杜 鏊 王旭峰 邢剑飞 郭文松 王 龙
(1.塔里木大学 机械电气化工程学院,新疆 阿拉尔 843300;2.中国农业大学 工学院,北京 100083;3.新疆维吾尔自治区普通高等学校现代农业工程重点实验室,新疆 阿拉尔 843300)
地膜覆盖是一种简单且经济的农业技术,具有增温保墒,提高土壤对作物生长的养分供应和水分利用效率,以及抑制杂草生长等特点,为全球干旱地区农业生产带来了安全保障[1-2]。我国西北干旱地区,地膜技术的应用使得农作物产量和水分利用率分别提高了45.50%和58.00%[3]。新疆棉花覆膜种植区,棉田采取连续多年覆膜种植方式,给当地棉花生产带来了极大收益。然而,长期地膜覆盖造成了农田残膜污染,影响了农田生态环境与土壤质量[1,4-5],在可控条件下实现残膜的有效回收是降低残膜污染的关键。
地膜回收可分为当季地膜回收和耕层残膜回收2种[6-7]。当季地膜定义为当年覆盖地膜经过1个耕作期后进行回收的残留地膜;耕层残膜回收定义为当季地膜未能回收完全,导致多年积累残留在土壤中的地膜碎片,当积累到一定残膜量后,对播种、作物生长有极大影响,需要进行机械化清理修复。在现有的地膜回收技术中,针对当季地膜回收作业机械的研发较多,以弹齿式为主[8],残膜回收率约为80.00%~90.00%[9]。在棉花覆膜种植农田中,覆膜量一般为82.50 kg/hm2,回收后每年的地膜残留量约为8.25~16.50 kg/hm2。连续覆膜种植一定年限后,土壤中残膜存量增加,影响作物生长、土壤生态以及播种耕地等机具作业,需要一种能实现耕层残膜回收的机具,以减少耕层土壤中残膜的存量,修复土壤结构,改善作物生长环境;技术发达国家采用的地膜厚度标准更高,力学性能较好[10],易于机械回收[11]。李贵春等[12]研制了针对于耕层残膜回收的齿链式残膜回收机,机具生产率0.47 hm2/h,残膜收净率≥85.00%。郭文松等[13]研究设计了一种梳齿起膜气力脱膜式耕层残膜回收机,拾净率平均值为55.04%。耕层残膜的机械化回收是一种土壤修复技术,需要将土壤中残膜碎片进行力学分离,作业难度大。
本研究拟采用基于膜土抛送分离输送的旋耕刀齿式起膜方法,对土壤耕层中的残膜进行分离回收;设计研制起膜回收整机系统,以期解决传统筛分式起膜作业方式效率低、回收效果差的问题,为农田土壤残膜污染治理提供技术支持与理论参考。
1 旋耕刀齿式棉田耕层残膜回收机设计方案
1.1 整体结构
根据农田残膜与播前土壤特点,本研究设计一种旋耕入土、刀齿旋转起膜、膜土筛分回收的旋耕刀齿式棉田耕层残膜回收机,即先将土壤松土,再用刀齿旋转起膜,刀齿碎土通过筛网分离。旋耕刀齿式棉田耕层残膜回收机主要由旋耕刀齿起膜装置、输送筛分装置、卸膜装置、碎土辊、限深辊、镇压辊装置、集膜箱和机架等部件组成。
旋耕刀齿起膜装置入土起膜,将残膜碎片从土壤中分离,再通过旋转带动膜土抛送至输送筛网,输送筛网设置一定的倾角,经筛孔作用使土块掉落,实现膜土二次分离;输送筛网上端装有碎土辊,与输送筛网之间限定孔隙间距,将大于限孔的土块等田间杂物压碎,由输送筛网再次筛分碎土;最后,筛分后的干净碎膜被传送至集膜装置内,实现残膜回收。机具前端安装有限深辊,限深调节器可以调节入土深度,以保证机具作业时的最优作业深度。另外,机具后端安装有镇压辊,用于旋耕起膜后虚土的压实,利于春耕播种培墒作业。旋耕刀齿式棉田耕层残膜回收机结构示意图见图1。
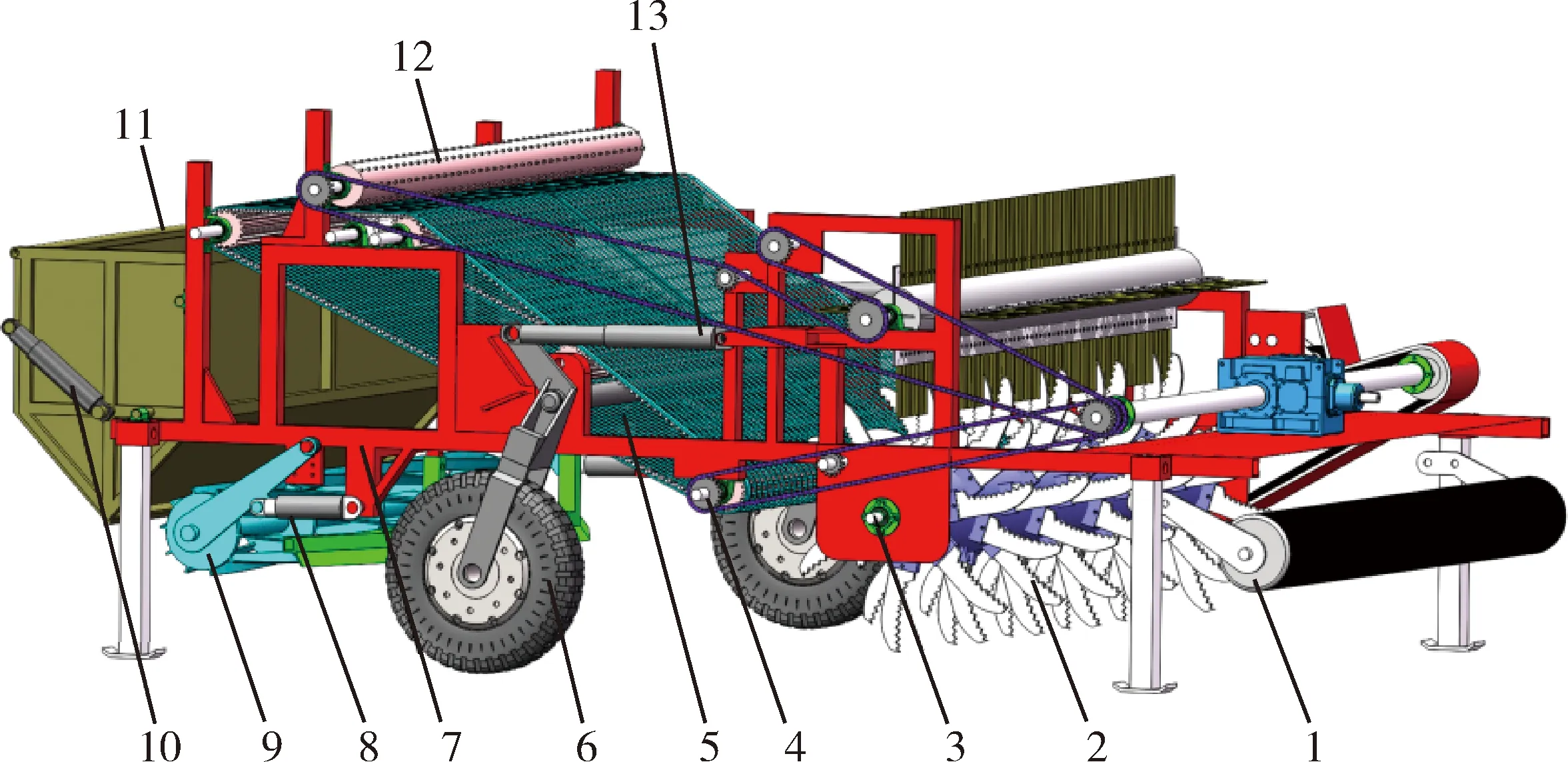
1.限深辊;2.旋耕刀齿起膜装置;3.旋转辊;4.筛分链轮;5.输送筛网;6.行走轮;7.机架;8.液压推杆;9.镇压辊装置;10.卸膜推杆;11.集膜箱;12.碎土辊;13.行走轮推杆1.Depth limiting roll; 2.Rotary tillage knife tooth film lifting device; 3.Rotary roll; 4.Screening sprocket; 5.Conveying screen; 6.Walking wheel; 7.Frame; 8.Hydraulic push rod; 9.Press roll device; 10.Film unloading push rod; 11.Collecting box; 12.Soil breaker roll; 13.Walking wheel push rod图1 旋耕刀齿式棉田耕层残膜回收机结构示意图Fig.1 Schematic diagram of rotary tillage knife tooth type cotton field plough layer residual film recovery machine
1.2 设计参数
新疆土壤以沙壤土为主,棉田采用平作模式,耕作层为0~300 mm,种床0~80 mm,棉花种植主要采用一膜六行模式。由于一膜六行模式中的地膜宽度为2 000 mm,故设计机具作业幅宽为2.21 m;考虑作业动力与土壤种床修复深度,设计作业耕深为100~200 mm,可调;配套动力取值≥75 kW;作业速度为3~7 km/h,可调;考虑耕层残膜回收作业难度,设计残膜回收率≥60%,具体旋耕刀齿式棉田耕层残膜回收机设计参数见表1。

表1 旋耕刀齿式棉田耕层残膜回收机设计参数Table 1 Design parameters of rotary tillage knife tooth type cotton field plough layer residual film recovery machine
2 旋耕刀齿式棉田耕层残膜回收机关键部件设计
2.1 旋耕刀齿起膜装置
旋耕刀齿起膜装置是机具核心工作部件,由旋转辊和刀齿组成(图2)。
1)旋转辊。旋转辊设计长度为2 210 mm,采用空心管径结构,材料为45号钢,内径为190 mm,外径200 mm,设计旋转速度最高为300 r/min,实际旋耕转速120~160 r/min。
2)刀齿。按照作业要求,设计采用刀齿总齿数为72个,刀齿入土深度200 mm,则刀齿长度设计为278 mm,厚度8 mm,入土齿端为锯齿分布,锯齿齿牙为20 mm,以便于地膜勾挂抛送。
3)刀齿排列方式。刀齿排列采用螺旋排列方式,以减小旋转轴扭矩以及牵引阻力。直列式刀齿排列工作时,刀齿入土顺序相同,切土角间距一致,影响旋转轴向作用力及旋转轴旋扭,且易形成涌土,增加牵引阻力,增大作业功耗。因此,设计采用圆柱螺旋式排列,使刀齿按标准圆柱螺旋线方程排列。
根据圆柱螺旋线方程公式[14],结合旋耕式旋转原理[15],建立圆柱螺旋线方程为:
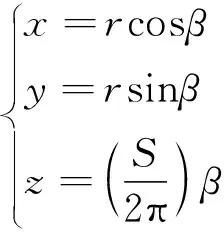
(1)
式中:r为旋转辊外圆半径,mm;S为螺旋导程,即为螺旋起点沿螺旋线绕圆柱一周的距离,mm;β为螺旋转角,由式(2)确定:
(2)
旋转辊圆柱体表面刀齿数为72个,按双螺旋排列,旋转辊外圆半径r=100 mm,将r=100 mm代入式(2)和(3),可计算出x、y值,以及S=1 087 mm,β=60°。
根据圆柱螺旋线方程及参数,设计2条刀齿圆柱螺旋线排列,则垂直于轴向同一旋转平面内齿数为2个,两刀齿相隔180°;纵向刀齿数设计为72把,相邻刀齿间距20°。起膜刀齿纵向每排刀齿数为4个,即同时旋转入土作业时的刀齿数为4个。
2.2 输送筛分装置
输送筛分装置是将旋耕起膜抛起后的残膜与部分碎土进行分离输送的装置[16]。输送筛分装置内部设置输送筛网,通过链轮带动旋转,上端安装有碎土辊,较小的土块通过输送筛网与残膜分离,大土块通过碎土辊压碎后再次筛分,完成残膜的输送回收。输送筛网输送残膜土块时的传动力F应满足:
F≥fkc+mkcgsinθw
(3)
式中:fkc为残膜土块运动至输送筛网后受到的沿筛输送网向下的摩擦力,N;mkc为残膜与土块的总质量,kg;θw为输送筛网倾角,(°),θw与膜土分离效果相关,25°~45°范围内可调,θw最优值需田间作业试验确定。
1)整体结构。输送筛分装置由输送筛网、输送辊、输送倾角调节辊、集膜箱、碎土辊和旋耕刀齿起膜装置组成(图3)。输送筛网由铆钉式链网组成,筛网间隙边长<2 mm,细小土块可由筛网过滤,残膜则输送至集膜箱内;输送辊由链轮带动,提供输送动力;输送倾角调节辊可以调节输送筛网的倾角,以达到最佳残膜分离效果。输送筛网宽度设计与旋耕刀齿起膜装置一致,为2 110 mm,初始输膜倾角为35°,链条总长度设计为4 400 mm。
1.输送辊;2.输送筛网;3.输送倾角调节辊;4.集膜箱;5.碎土辊;6.旋耕刀齿起膜装置1.Conveying roller; 2.Conveying screen; 3.Conveyor inclination adjusting roll; 4.Membrane collecting tank; 5.Soil breaker roll; 6.Rotary tillage knife tooth film lifting device图3 输送筛分装置示意图Fig.3 Schematic diagram of conveying and screening device
2)碎土辊。为防止未完全分离的土块进入集膜箱内,在输送筛网上端设置随动式碎土辊。碎土辊位于输送筛网上端,与筛网间隙设计为3~5 mm。具体工作时,碎土辊逆时钟旋转,输送筛网在链轮带动下向集膜箱输送,碎土辊与筛网间隙为碎土直径,当土块直径小于碎土直径时,通过筛网过滤至田间;当土块直径大于碎土直径时,土块则被碎土辊碾碎,与残膜分离再次以筛网过滤。
3 膜土分离运动过程分析
旋耕刀齿起膜过程是刀齿旋转和向前行进2个运动过程的叠加。旋耕起膜作业时,顺时针方向旋转,将土壤松土,使土壤与残膜发生第一次分离;旋转动力作用下,刀齿带动残膜与部分土块向输送筛网抛送,利用残膜与土壤质量差异,两者被抛送至输送筛网上的位置不同,使膜土发生第二次分离;最终,土块撞击输送筛网后变成碎土过滤至田间,残膜则通过输送筛网回收。
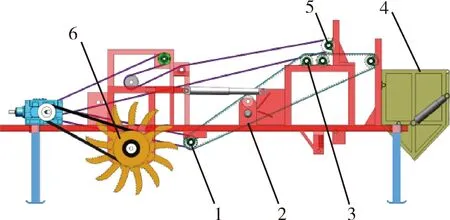
起膜回收运动过程见图4。起膜装置以ωq,1旋耕作业,卸膜装置以ωq,2顺时针旋转,将刀齿上残膜刷落,残膜及土块以不同的速度被抛送至输送筛网上,土块经筛网落回地面,残膜经筛网输送回收。另外,碎土辊逆时针旋转,与输送筛分装置间距为H1,以限制大土块进入残膜回收箱内。起膜装置与输送筛网间距为L1,在满足旋转刀齿作业空间条件下,L1应确保残膜抛送后输送筛网的最小筛分间隙。
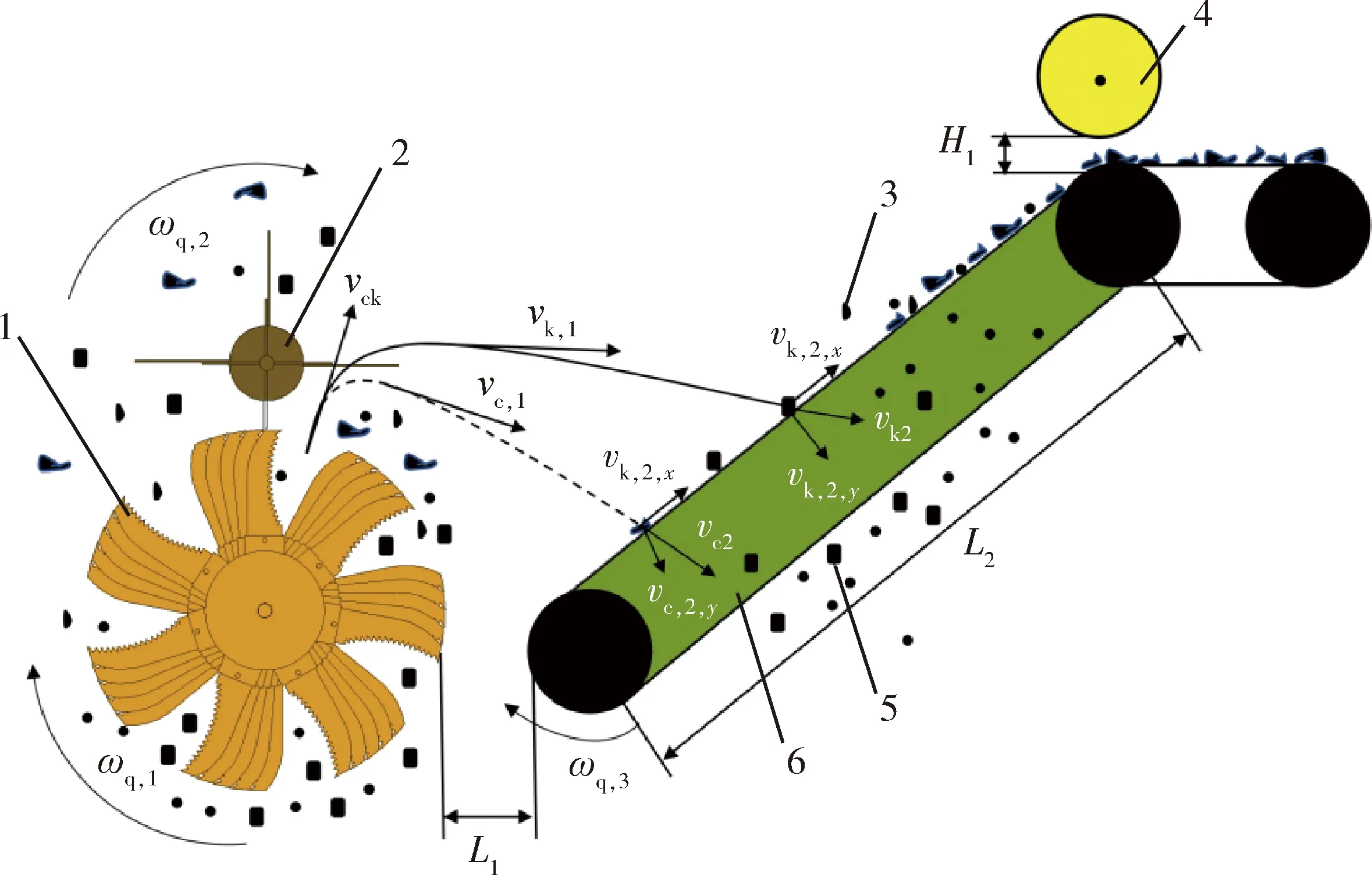
1.旋耕刀齿起膜装置;2.柔性扫膜辊;3.残膜;4.碎土辊;5.土块;6.输送筛网1.Rotary tillage knife tooth film lifting device; 2.Flexible film sweeping roller; 3.Residual film; 4.Soil breaker roll; 5.Soil block; 6.Conveying screenx为沿输送筛网水平向上;y为垂直输送筛网向下。ωq,1为起膜装置角速度;ωq,2为卸膜装置角速度;ωq,3为输送筛分装置角速度;L1为起膜装置和输送筛分装置的距离;L2为输送筛网长度;vck为土块和残膜混合物从起膜装置抛起的初速度;vk,1为土块从起膜装置抛出的速度;vc,1为残膜从起膜装置抛出的速度;vk,2为土块撞击到输送筛分装置上的速度;vc,2为残膜撞击到输送筛分装置上的速度;vk,2,x和vk,2,y为土块质点沿输送筛网水平和垂直方向的分速度;vc,2,x和vc,2,y为残膜质点沿输送筛网水平和垂直方向的分速度。x is the horizontal upward direction along the conveying screen; y is the downward direction of the vertical conveying screen.ωq,1 is the angular velocity of the film lifting device; ωq,2 is the angular velocity of the film unloading device; ωq,3 is the angular velocity of the conveying screening device; L1 is the distance between the film lifting device and the conveying and screening device; L2 is the length of conveying screen; vck is the initial speed of the mixture of soil lump and residual film thrown from the film lifting device; vk,1 is the speed at which the soil block is thrown from the membrane lifting device; vc,1 is the speed at which the residual film is thrown from the film lifting device; vk,2 is the speed at which the soil block strikes the conveying and screening device; vc,2 is the speed at which the residual film strikes the conveying screening device; vk,2,x and vk,2,y are the particle velocity of soil lumps along the horizontal and vertical directions of the conveying screen; vc,2,x and vc,2,y are the fractional velocities of the particles of the residual film along the horizontal and vertical directions of the conveying screen.图4 起膜回收运动示意图Fig.4 Schematic diagram of film lifting and recovery movement
3.1 土块抛送运动
以膜土混合物抛出点为原点o,膜土混合物水平运动位移为x轴、竖直运动位移为y轴,建立直角坐标系,图5示出膜土旋耕抛送运动过程。由于土块质量较大,抛送过程中风阻对其影响较小,可忽略不计。根据质点运动方程,土块的抛送过程表达[17]为:
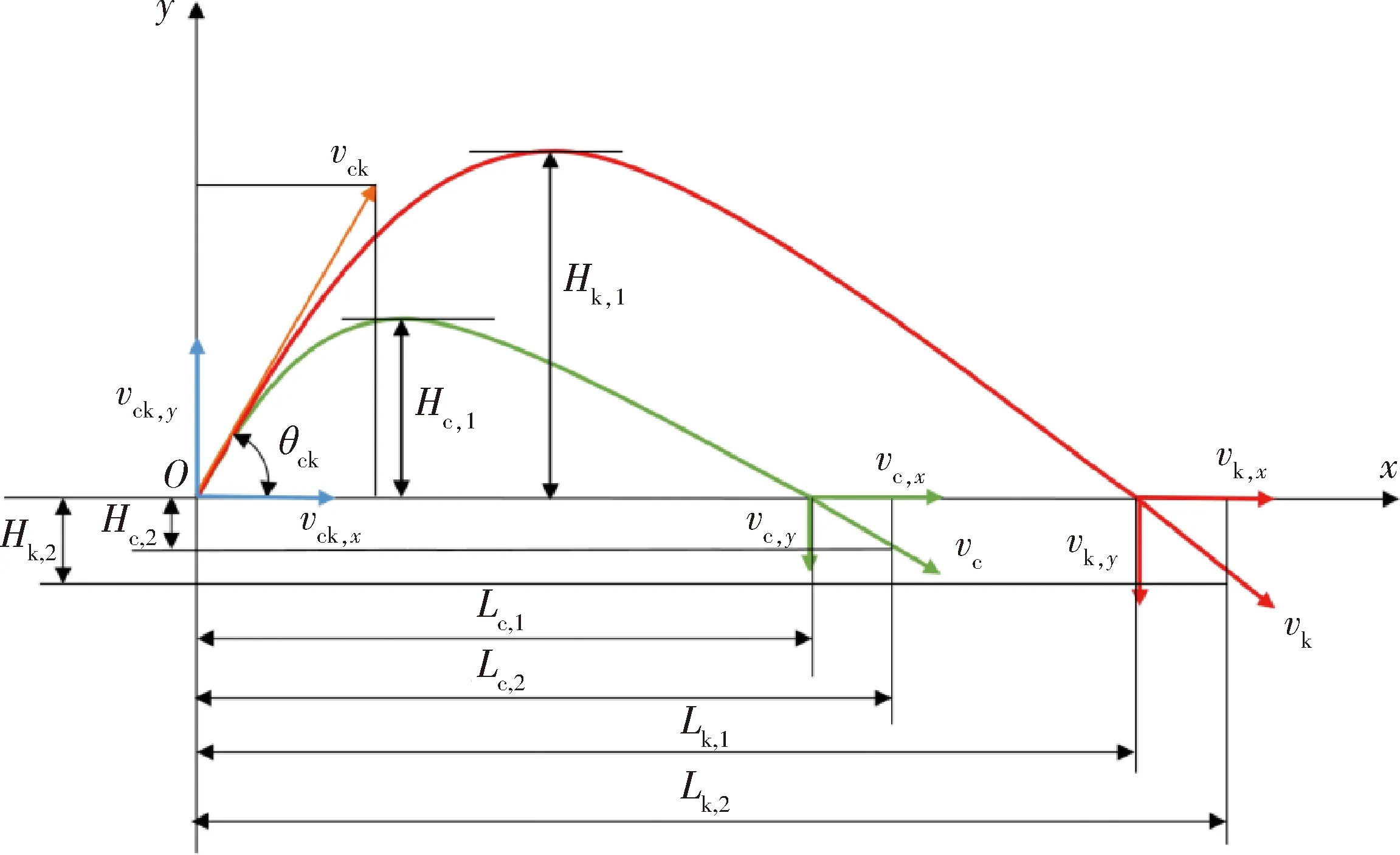
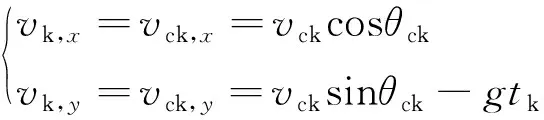
x和y分别为残膜和土块运动的水平和垂直位移;vck为土块和残膜混合物从起膜装置抛起的初速度;vck,x和vck,y分别为vck在x和y方向的分速度;vk为土块质点撞击到输送网上的速度;vk,x和vk,y分别为vk在x和y方向的分速度;vc为残膜质点撞击到输送筛网上的速度;vc,x和vc,y分别为vc在x和y方向的分速度;Hk,1和Hc,1分别为土块和残膜抛送最大竖直高度;Hk,2和Hc,2分别为土块和残膜接触输送筛网后至碎土过滤点反向回落的垂直距离;Lk,1为土块质点从旋耕刀齿抛出点运动至输送筛网的水平距离;Lk,2为土块质点从旋耕刀齿抛出点运动至碎土过滤点的水平距离;θck为土块和残膜混合物向输送筛网抛送的抛送倾角。The x and y are the horizontal and vertical displacement of residual film and soil mass movement respectively; vck is the initial speed of the mixture of soil and residual film thrown from the film lifting device; vck,x and vck,y are the partial velocities of vck in x and y directions respectively; vk is the speed at which the particle of the soil block impacts the conveying screen; vk,x and vk,y are the partial velocities of vk in x and y directions respectively; vc is the speed at which the particle of the soil block impacts the conveying screen; vc,x and vc,y are the partial velocities of vc in x and y directions respectively; Hk,1 and Hc,1 are the vertical distance between the soil mass particle and the residual film particle from the throwing point of the rotary blade tooth to the highest point of the parabola; Hk,2 and Hc,2 are the vertical distance from the soil block particle and the residual film particle after contacting the conveying screen to the reverse fall of the broken soil filter point; Lk,1 is the horizontal distance from the movement of the soil particle from the throwing point of the rotary blade tooth to the conveying screen; Lk,2 is the horizontal distance from the movement of the particle of the soil block from the throwing point of the rotary blade tooth to the filtering point of the broken soil; θck is the throwing angle of the mixture of soil lump and residual film to the conveying screen.图5 膜土旋耕抛送运动过程示意图Fig.5 Schematic diagram of membrane soil rotary tillage throwing movement process

(4)
式中:mk为土块质点质量,kg;vk为土块质点撞击到输送网上的速度;vk,x和vk,y分别为vk在x和y方向的分速度,m/s;tk为土块质点进行斜抛运动的时间,s。
为求土块运动位移,对式(4)进行积分,可求得位移运动变化方程为:
(5)
(6)
式中:θck为土块和残膜混合物向输送筛网抛送的抛送倾角,(°);vck为土块和残膜混合物从起膜装置抛起的初速度,m/s;vck,x和vck,y分别为vck在x和y方向的分速度,m/s。对式(5)和(6)合并变换,可求得土块抛物线运动各阶段位移:
(7)
(8)
(9)
式中:Hk,1为土块质点抛送最大竖直高度,mm;Hk,2为土块质点接触输送筛网后至碎土过滤点反向回落的垂直距离,mm;t1为土块质点从旋耕刀齿抛出点运动至抛物线最高点所需的时间,s;t2为土块质点从抛物线最高点运动至输送筛网所需的时间,s;t3为土块质点接触输送筛网后至碎土过滤点所需的时间,s;Lk,1为土块质点从旋耕刀齿抛出点运动至输送筛网的水平距离,mm;Lk,2为土块质点从旋耕刀齿抛出点运动至碎土过滤点的水平距离,mm;L′k,2为Lk,2在输送筛网向上提升输送的位移,mm。
土块被抛送到输送筛网上时仍具有一定的运动速度,且与输送筛网接触后破碎,经筛网过滤后自由掉落至田间。土块被旋转刀齿起膜装置抛送到输送筛网上至其破碎的过程是质点减速运动过程,此时土块运动受筛网过滤后重力与残余作用力影响:
mkgsinθw-μ1mkgcosθw=mkak
(10)
vk,2,x=vk,xcosθw
(11)
(12)
式中:L″k,2为土块回落后掉入至田间的位移,mm;ak为土块到达抛物线最高点后的减速段加速度,m/s2;μ1为土块与筛网接触移动时的摩擦因数。可见,土块减速运动过程是向筛网下部滚落移动的过程。与残膜相比,土块的抛物线跨度更大,滚动位移更长,可以实现膜土分离。
3.2 残膜抛送运动
与土块相比,残膜密度小,密度的差异使残膜被旋耕起膜后抛送的运动位移更小,落至输送筛网上的距离更短。考虑残膜密度因素,抛送时空气阻力影响运动位移,由空气阻力方程可得:
fc=-kvck
(13)
式中:fc为残膜抛送过程中所受到的空气阻力,N;k为残膜制品的空阻系数。引入质点运动方程,得:
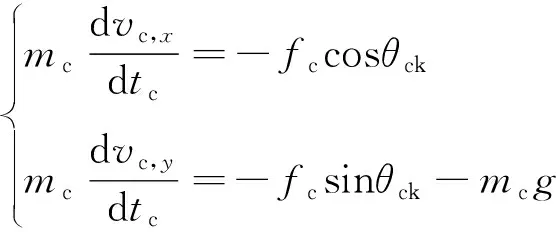
(14)
式中:mc为残膜质点质量,kg;tc为残膜质点抛送至输送筛网所需的时间,s。对式(14)进行积分,可求得残膜质点速度与位移运动变化方程为:
(15)
(16)
从式(15)和(16)可以看出:由于残膜密度较小,形态为碎片状,被旋耕刀齿起膜装置抛送至输送筛网上滚动的位移较小,落点位置也远小于土块落点位置,在输送筛网带动下进入集膜箱内,从而实现膜土分离与残膜回收。
根据设计要求,残膜回收机前进速度为4~6 km/h,旋耕刀齿起膜装置旋转速度区间为120~140 r/min,输送筛网倾角范围为25°~45°。则设残膜回收机旋耕起膜抛送土块质点速度初始值为2.0 m/s,输送筛网倾角初始值为35°,代入式(7)、(8)、(9)中,可计算出土块质点到达输送筛网反向回落位移Hk,2=0.42 m,此时土块在输送筛网向上提升输送位移L′k,2=0.62 m;通过代入初始速度、输送筛网倾角等数据至式(10)、(11)、(12)计算可得,土块回落后掉入至田间的位移L″k,2=1.24 m,即表明土块通过旋耕刀齿起膜装置抛送至输送筛网后,反向回落至输送带下端,碎土块经筛网过滤掉落至田间,其运动方向与输送筛网运动方向相反;而残膜抛送距离更短且密度较小,输送筛网可直接将残膜传送至回收箱内,从而完成了大部分膜土分离。实测时仅有小部分因涌土引起的土块被传输至输送带上端,而输送带上端安装有碎土辊,可将土块再次碎化分离。从运动分析也可以看出,旋耕刀齿起膜装置可以通过残膜和土块被抛送力度的不同,实现膜土分离。
4 田间试验与分析
4.1 测试地点及土壤条件
田间测试地点为新疆生产建设兵团第一师阿拉尔市10团8连推广中心棉田(40°33′ N,81°10′ E,海拔1 031 m),农田土壤为沙壤土,覆膜年限为14年,面积26.67 hm2,为多年连作覆膜种植棉田。测试时间为2022-03-26,此时农田为春耕犁地后待播种地块。
4.2 田间试验方法
1)田间测试。采用约翰迪尔6J-2104拖拉机(约翰迪尔(天津)有限公司生产)为作业动力,旋耕刀齿式棉田耕层残膜回收机采用牵引式悬挂,旋耕刀齿起膜装置由拖拉机旋转输出轴提供动力,提供75~450 r/min分段式有级变速调节;卸膜箱、行走轮和限深轮等均通过拖拉机自带液压系统提供动力。试验前,按照新疆农田耕地要求进行犁地作业,耕地后采用土壤温湿度检测仪(WKT-M1型,江苏维科特仪器仪表有限公司生产)测量土壤含水率为22.43%~23.18%,满足残膜回收作业条件。田间测试采用分区测试法,将农田分成长度80 m,宽度2 m的矩形区域20个,依次编号,按序号进行作业测试。根据设计的作业区间,以及参考残膜回收机作业方法,设置旋耕刀齿式棉田残膜回收机作业速度为4、5、6 km/h 3个水平,旋耕刀齿起膜装置旋转速度水平值为140 r/min,入土深度160 mm。为提高试验准确性,在每项因素试验时设计重复组,统计2组试验的平均值,即为试验结果。
2)残膜量测量方法。试验前,根据GB/T 25413—2010《农田残膜残留量限值及测定》[18],在试验农田随机选取5个残膜取样点,取样点面积1 m2,收取取样点0~300 mm以内的残膜,进行人工分选,去除田间杂物,再用超声波清洗机(FRQ-1002 T,浙江法兰特公司生产)清洗,自然干燥后,采用电子天平(M1002E-02型,美国METTLER TOLEDO公司生产)称重,获取试验前、后农田残膜质量。试验后,再以此方法取样,校核残膜回收机作业后农田残膜残留量。作业前,采用五点取样方法测得试验田0~300 mm全耕层残膜残留密度均值为268.29 kg/hm2。
4.3 试验评价指标
依据GB/T 25412—2010《残地膜回收机》[19],结合旋耕刀齿式棉田耕层残膜回收机设计要求,选取残膜回收率、作业效率和含杂率作为试验评价指标。
1)残膜回收率。残膜回收率的标定方法为五点采样法,残膜回收机作业前后各进行1次采样。采样面积为100 cm×100 cm,采样深度30 cm,计算平均值。计算公式[20-21]为:
(17)
式中:δ0为残膜回收率,%;M0为土壤中总的残膜残留量,g;M1为作业后土壤中剩余残膜残留量,g。
2)作业效率。试验时,根据残膜回收机的作业速度设置作业幅宽,测试残膜回收机完成每个160 m2作业面积所需的时间,时间越短,则作业效率越高。残膜回收机故障时间计入作业面积所花费的时间。具体的计算方法为:
(18)
式中:η为作业效率,hm2/h;Sz为残膜回收机作业面积,hm2;tz为残膜回收机作业时间,h。
3)含杂率。含杂率是指残膜回收机回收的残膜中含有棉杆、杂根等田间杂物的质量与残膜、田间杂物质量之间的比值[22]。由于残膜中碎土较容易去除,在试验时不计入田间杂物范围。含杂率主要判别回收后残膜的干净程度,计算公式[23]为:
(19)
式中:δ为含杂率,%;g1为残膜回收机回收的残膜总质量,kg;g2为残膜回收机回收的残膜、棉杆、杂根等田间杂物去除田间碎土后的总质量,kg。
5 结果与分析
田间试验过程中,旋耕刀齿式棉田耕层残膜回收机运行稳定,无作业故障,满足回收要求。田间试验结果见表2。当旋耕刀齿起膜装置旋转速度水平值为140 r/min,入土深度为160 mm,机具作业速度为5 km/h时,回收率为80.06%,作业效率0.725 hm2/h,含杂率25.4%,此时为较适宜的作业速度。从试验结果可以看出,随着机具作业速度增大,作业效率增高,残膜回收率降低,含杂率升高。
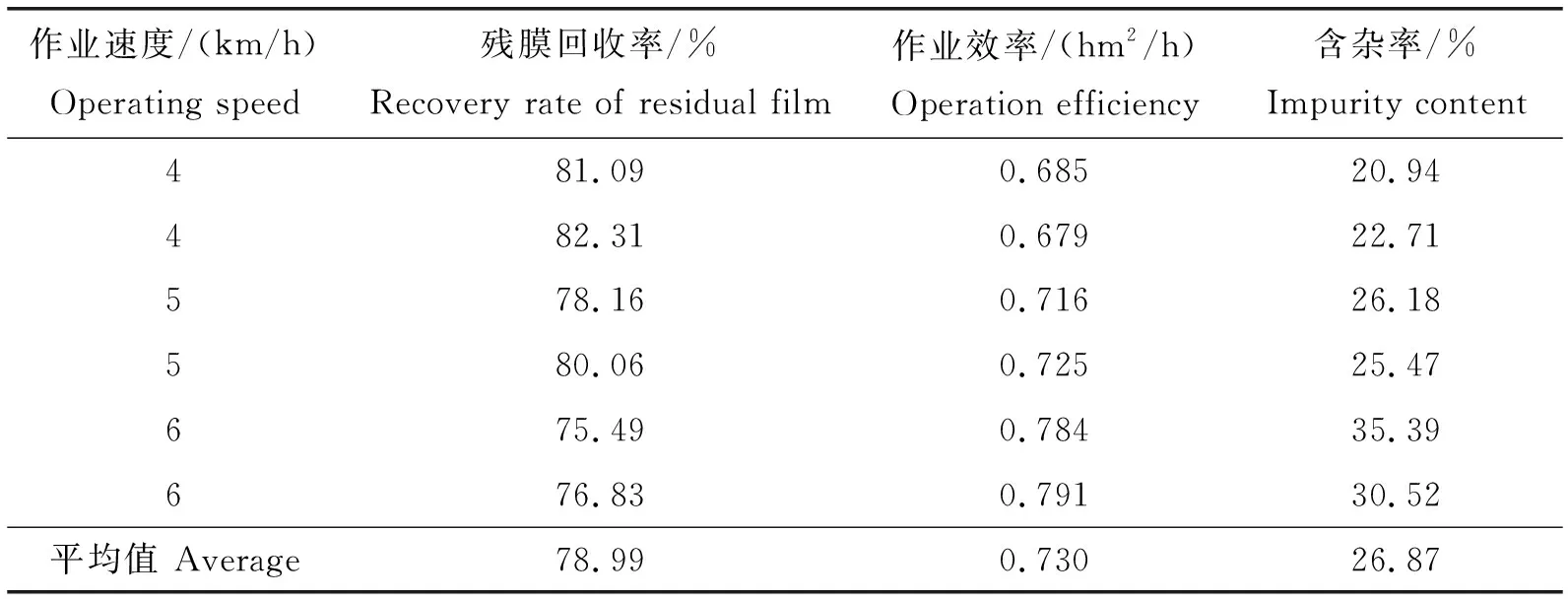
表2 旋耕刀齿式棉田耕层残膜回收机作业田间试验结果Table 2 Field test results of rotary tillage knife tooth type cotton field plough layer residual film recovery machine
图6示出旋耕刀齿式棉田耕层残膜回收机作业后的农田地面效果和回收后的耕层残膜。可见,旋耕刀齿式棉田耕层残膜回收机作业后的地面平整,耕作层中的大片残膜均已完成回收。
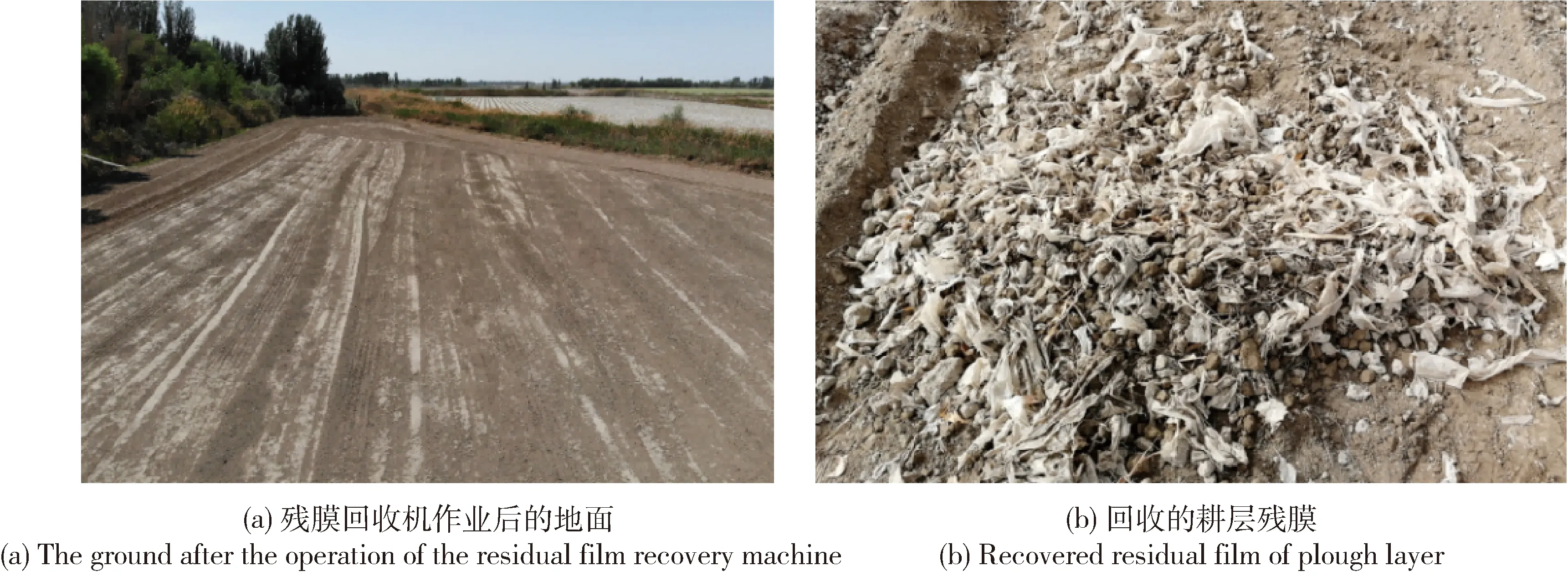
图6 旋耕刀齿式棉田耕层残膜回收机作业效果Fig.6 Operation effect of rotary tillage knife tooth type cotton field plough layer residual film recovery machine
对旋耕刀齿式棉田耕层残膜回收机作业后的农田进行取样,采集1 000 mm×1 000 mm×300 mm土壤层中的残膜样品,其大小、密度分布见图7。

柱上字母a表示不同土壤深度下残膜残留密度差异显著(P<0.05),竖线表示标准差。The letter a above the column indicates a significant difference in residual density of residual membrane at different soil depths (P<0.05), and the vertical line indicates the standard deviation.图7 回收作业后土壤残膜大小及密度分布Fig.7 Size and density distribution of soil residual film after recycling operation
残膜回收机作业后,耕层残膜量已明显降低,0~300 mm土壤层中残膜面积均值<25.38 cm2,残留片数<90片,表层残膜残留密度降低至0.124 kg/hm2,各耕层残膜残留密度均已明显降低,最高残留密度为250~300 mm土壤层,密度为3.796 kg/hm2;全耕层残膜量由作业前的268.29 kg/hm2降低至作业后的16.49 kg/hm2,每个样点的平均残膜片数由作业前的370片减少至作业后的90片,表明旋耕刀齿式棉田耕层残膜回收机对农田土壤残膜污染治理效果明显。
6 结 论
本研究针对耕层残膜回收机传统筛分式起膜作业方式效率低、回收效果差等问题,设计了一种基于膜土抛送分离输送的旋耕刀齿式起膜方法,研制出了起膜回收整机系统,并对机具关键部件进行了结构和参数设计。
1)对样机进行田间试验验证,结果表明,样机作业速度增大,残膜回收率降低,含杂率升高。当作业速度为5 km/h时,回收率为80.06%,作业效率为0.725 hm2/h,含杂率为25.47%,此时样机具有较好的残膜回收效果。
2)田间试验表明,旋耕刀齿式棉田耕层残膜回收机能够有效回收耕层中面积较大的地膜碎片。持续性的机械化回收不仅能降低土壤中残膜存量,从源头上减小地膜碎片给作物生长、土壤环境带来的污染影响,也有利于抑制面积较大的残膜向微塑料碎片转化。
3)旋耕刀齿式棉田耕层残膜回收机适用于多年持续覆盖地膜的典型区域土壤;地膜逐年分解,残存在耕层土壤中的地膜碎片越来越小,随着水肥向更深处迁移、积累,未来耕层残膜治理应更注重于微小地膜碎片的处理。