星载平面相控阵天线相位中心位姿标定方法
2023-09-06陈国忠陈筠力
陈 汀,陈国忠,陈筠力
(1.上海卫星工程研究所,上海 201109;2.上海航天技术研究院,上海 201109)
0 引言
对于搭载平面相控阵天线的卫星,为了实现高精度相干成像,在成像算法上对影响卫星成像的相位变化精度的要求也愈加严格,导致天线的相位中心位置及其稳定性,对卫星系统成像精度的影响也越来越多地受到研究人员的关注[1-3]。我国首个基于干涉合成孔径雷达技术的测绘卫星系统,解决了干涉相位的绝对模糊问题,并用在轨数据验证了技术途径的可行性[4]。平面相控阵天线的相位中心是天线的电气基准点,出于高分辨率成像和运动补偿的需要,为了保证卫星特定的成像分辨能力,要求各通道对应的天线相位中心位置精确可知。相位中心的位置精度要求需要达到亚毫米级,对于实际的星载平面相控阵天线,由于加工工艺、安装误差、测量误差等因素的影响,在卫星地面测试与总装阶段,需要对星载的平面相控阵天线的相位中心位姿进行标定。如果不经过测量和补偿,该要求在工程实现中往往难以实现。特别是天线装星后复杂的边界条件不可避免地要引入天线相位中心的误差,因此,如何高精度标定平面相控阵天线的相位中心位姿成为难点。
文献[5]针对上行天线阵相位中心标校技术粗糙、精度不高等问题,引入精密工程测量技术测定天线实际状态,提出了一种顾及现势指向的相位中心精确标校方法。利用工业摄影测量系统获取天线的型面数据,获得可靠的相位中心。文献[6]针对星载抛物面天线成像过程中,对波束指向精度的要求,提出了天线视在相位中心的确定方法,并利用多体系统仿真方法研究了卫星机动过程中的视在相位中心范围及影响因素。文献[7-8]为了准确确定天线单元的位置并完成精准校准,提出一种计算宽带干涉仪天线阵列相位中心及精确校准的方法,提升了系统的测向精度。文献[9]针对机体结构变形、基准信息延迟两大因素,对机载SAR 天线相位中心处惯性测量单元实时姿态精度影响问题进行了仿真研究,明确了结构变形补偿和延迟修正措施的必要性。文献[10]针对单元间距很大的分布式阵列空间目标监视雷达远场辐射校准困难的问题,提出了一种利用多弧段的精轨卫星精密星历对阵面相位中心误差进行校准的方法,提升了测角精度。文献[11]针对天线组阵后各阵元天线相位中心与其物理中心不一致,导致测向性能下降甚至失效的问题,提出了一种阵列测向模型的工程修正方法,改善了阵列的侧向精度。分布式InSAR 可以突破时间去相干和基线长度限制,利用干涉成像技术实现地面目标的三维定位、地表形变和动目标监测等,极大地拓展了以往星载InSAR 系统的干涉性能和测绘精度,已成为高分辨率对地观测领域的研究热点[12-14]。针对卫星天线相位中心误差对分布式SAR 卫星基线测量的精度的影响,国内外学者均对该影响因素进行了研究,提出了一系列的天线相位中心变化影响建模补偿技术。文献[15-16]针对天线相位中心误差,采用精密定位软件工具包对多颗卫星开展了相位中心误差影响分析与建模消除的研究。相关文献均在卫星定轨与动力学尺寸模型建立中提到相位中心对精度的影响分析结果[17-25]。
上述研究主要集中在天线阵列形式,以及抛物面形式的天线相位中心的仿真与标定工作,有关星载平面相控阵天线相位中心的位姿标定研究尚需深入开展。为了准确标校出平面相控阵天线相位中心相对卫星主基准的位姿坐标,本文提出了一种基于位姿转换数学模型的天线相位中心标定方法,首先,建立了天线相位中心位姿转换的数学模型,明确了天线电气基准相对卫星主基准的位置和姿态转换关系;然后,分别对天线的相位中心的电气基准、在卫星上的机械基准,以及天线装星后相位中心的姿态进行了测量,获取了天线相位中心分别在本体坐标系和在卫星主基准坐标系下的相位中心位姿数据;最后,通过本文提出的位姿转换数学模型,获取了天线相位中心在卫星上的位姿数据。
1 天线相位中心位姿转换数学模型
天线相位中心是天线的电气基准点,本文基于坐标变换理论,通过坐标系转移和矩阵变换的方法,将其向可物理测量的坐标点转换。
首先在星体和天线上分别建立并固连坐标系,分别称为局部坐标系CB和CA,天线的局部坐标系CA相对星体的局部坐标系CB的位姿变换可表示为
式中:DBA为位姿变换矩阵。
一般情况下,位姿变换包括沿各自坐标系X、Y、Z轴的基本平移变换TX、TY、TZ和绕X、Y、Z轴的基本旋转变换RX、RY、RZ,则位姿变换矩阵DBA可表示为
式中:ΔX、ΔY、ΔZ分别为沿X、Y、Z轴的位置偏差值;Δx、Δy、Δz分别为绕X、Y、Z轴的角度偏差值。
因此,为了精确获取天线相位中心的位姿数据,首先需要对天线的相位中心进行位置度测量,然后对天线相位中心相对卫星基准坐标系进行姿态测量,通过以上坐标系变换,最终计算出天线相位中心相对卫星基准坐标系的位姿数据。
2 天线相位中心标定方法
2.1 天线相位中心暗室标定
将天线放入暗室测量系统进行相位中心标定测试,可以测得天线本体坐标系下的天线相位中心位置S1。在天线框架上安装基准棱镜,建立基准棱镜坐标系,然后通过光学测量的方法,可以测得这2个坐标系之间的角度变换矩阵M1和位置变换矩阵M2,天线棱镜坐标系下的相位中心位置为S2,记为S2=M1⋅S1+M2。
2.2 天线相位中心位置度标定方法
在天线框架上安装基准棱镜,建立基准棱镜坐标系,同时在天线框架四角布置12 个基准块,通过机械加工方式保证框架平面内X和Y方向的对称度优于0.05 mm,Z方向的平面度优于0.05 mm。通过三坐标测量机测量出框架中心的坐标,并以此中心为原点建立天线本体坐标系O′X′Y′Z′,如 图1所示。

图1 天线相位中心标定Fig.1 Diagram of antenna phase center calibration
采用激光跟踪仪测量卫星星体结构顶板四角处的基准块,拟合出激光跟踪仪坐标系RJ下的星体结构顶板中心坐标RJ0,建立卫星基准坐标系记为RL。测量天线X、Y、Z向3 个方向的基准块,每个基准块上测量5 个点拟合出X、Y、Z基准面。将X、Y基准面投影到拟合出的Z向基准面求解出天线的几何中心,得出几何中心在坐标系RJ下的坐标RJ-SAR。采用激光跟踪仪坐标系RJ到卫星基准坐标系RL的转换矩阵Q,可以获得天线相位中心在卫星基准坐标系的坐标为Q·。
2.3 天线姿态测量
天线装星后,通过光学测量的方法可以测得基准棱镜坐标系与卫星基准坐标系的位置变换矩阵M3,卫星基准坐标系下的相位中心位置记为SL,通过坐标转换可以获得SL=S2+M3=M1⋅S1+M2+M3。
天线装星后的姿态测量采用精度测量系统,整个精测过程使用多台TM5100A 经纬仪构建测量系统,测量系统的误差为10″。如图2 所示,本文采用4 台经纬仪联机建立精测系统,并利用精测软件解算来进行单机精度测量。
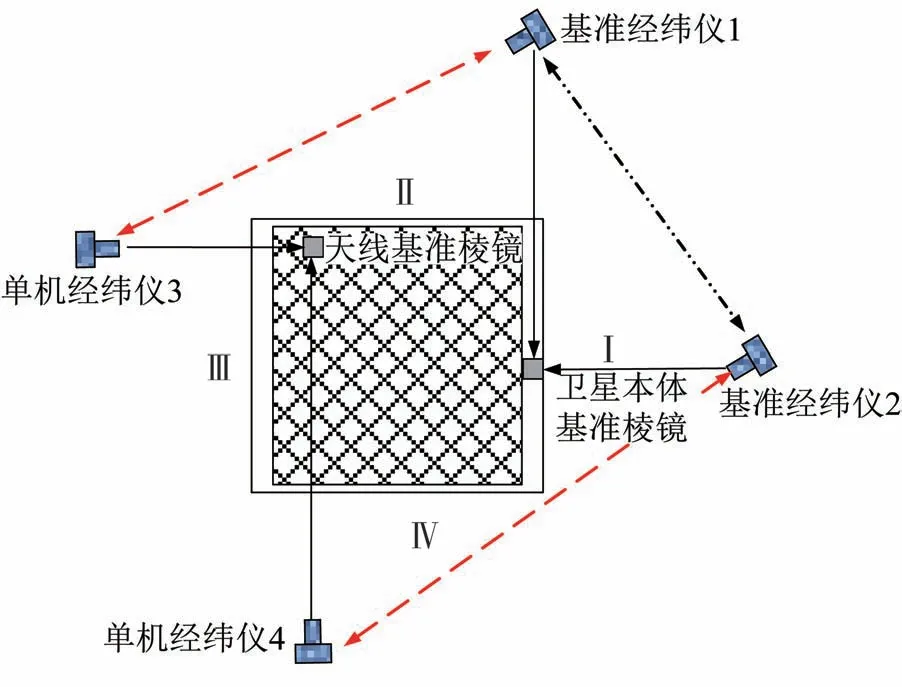
图2 天线姿态测量Fig.2 Diagram of antenna attitude measurement
测试步骤如下所示。
1)卫星任意停放在工作台上;
2)2 台基准经纬仪分别瞄准基准棱镜两待测光轴,准直记下俯仰角,然后互瞄记下各自偏转角,建立测量基准;
3)另2 台单机经纬仪分别与天线棱镜两正交面自准直,测得其俯仰角,并与2 台瞄基准棱镜的经纬仪两两对瞄,记下各自偏转角;
4)定义卫星主基准坐标系与天线的本体坐标系的位置和方位矩阵。
3 测试结果分析
3.1 天线相位中心稳定度测量结果
通过在微波暗室对天线方向图进行近场测试,并用激光跟踪仪测试天线靶座坐标系及测试系统参考靶座,并现场将天线靶座坐标系转换为天线本体坐标系,处理天线测试系统坐标系、天线本体坐标系之间的转换关系作为一组暗室标定数据,获取了天线的相位中心测试数据,结果见表1。

表1 相位中心稳定度测量结果Tab.1 Results of phase center stability measurement
为测试天线相位中心的稳定度,对天线相位中心的5 个不同频点进行了测量,获取了5 组相位中心的坐标数据。为了评估天线相位中心测试结果的稳定性,首先计算了每组测试数据的均方根值,然后计算5 组天线相位中心坐标均方根值的平均值和标准差,分析结果表明,不同频点下的相位中心均方根值的方差优于0.1,测量数据稳定可靠,测试结果有效。
3.2 天线机械中心位置测量结果
在天线与卫星平台进行对接时,对天线装星后的天线机械中心进行了测量,测量时的环境温度为24.7 ℃,相对湿度48%。为了评估测量数据的重复性误差,对机械中心进行了3 次重复测量,结果见表2。
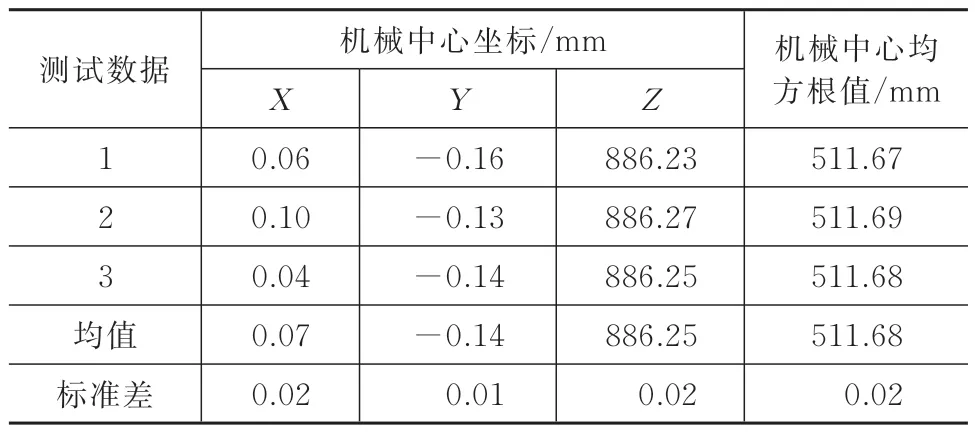
表2 天线机械中心测量结果Tab.2 Results of antenna mechanical center measurement
为评估天线机械中心测试结果的稳定性,首先计算了每组测试数据的均方根值,然后计算3 组天线机械中心坐标均方根值的平均值和标准差,分析结果表明,天线机械中心坐标的均方根值的标准差优于0.02,测量数据稳定可靠,测试结果有效。
3.3 天线姿态测量结果
在天线装星并完成机械中心位置度测量后,为了评估天线坐标系相对卫星主基准坐标系的偏转角度,需要测量天线基准棱镜相对卫星平台主基准棱镜的角度,并在紧固件松开与拧紧的条件下,分别进行了测量,测量时的环境温度为24.7 ℃,相对湿度48%。测量结果见表3。

表3 天线姿态测量结果Tab.3 Results of antenna attitude measurement
为评估天线在与卫星平台连接的6 个紧固件松开与拧紧状态下,对安装天线安装精度的影响,计算了天线基准坐标系的每个轴与卫星主基准坐标系每个轴的夹角偏差,分析结果表明,天线基准的角度变化很小,单轴的最大偏差仅13″,与系统测量误差(10″)相当,说明装配应力对天线的相位中心的指向影响很小,可以忽略不计。
4 结束语
天线相位中心是天线的电气基准点,影响天线相位中心的因素主要有天线的设计和天线在星上的安装两个方面。特别是天线装星后复杂的边界条件不可避免地要引入天线相位中心的误差,因此,本文提出了一种平面相控阵天线高精度标定的方法,以保证天线在卫星上的安装精度。
该方法首先针对天线和卫星星体建立基准坐标系,通过坐标系转移和坐标变换的方法建立了天线与卫星星体之间的坐标转换的数学模型,并通过该数学模型计算出天线相位中心相对卫星基准坐标系的位姿数据。针对天线相位中心的标定,提出了采用暗室测量系统进行天线相位中心的方法。通过在天线框架上安装基准棱镜,建立基准棱镜坐标系,然后通过光学测量的方法测得天线本体坐标系和天线基准棱镜之间的位姿变换矩阵。为了获取天线在装星后的相位中心的位置度,提出了在天线框架4 个角设置基准块,并结合天线框架基准棱镜建立了天线与卫星基准的位置关系,利用激光跟踪仪,对天线相位中心在卫星基准坐标系下的位置度进行了高精度标定,确定了天线相位中心在卫星坐标系下的位置坐标。
同时,为了评估天线与卫星星体结构之间的紧固件的拧紧力矩对天线相位中心与卫星基准坐标系的指向误差的影响,利用经纬仪精测系统对天线框架的基准棱镜相对卫星主基准的基准棱镜进行了光学标定。结果表明,天线与卫星星体结构之间的紧固件的拧紧力矩对天线的指向误差的影响与经纬仪精测系统的测量误差相当,对说明装配应力对天线的相位中心的指向影响很小,可以忽略不计。该方法通过理论分析和试验验证相结合的方式,准确标校了平面相控阵天线相位中心相对卫星主基准的位姿坐标,为后续装载平面相控阵天线的卫星的相位中心的位置标定提供了理论与实施参考。
