近自由面串列超空泡航行体的流动特性研究
2023-09-03鲁建华周东辉贾会霞
鲁建华,周东辉,贾会霞
(1.浙江工业职业技术学院, 浙江 绍兴 312000;2 浙江理工大学 机械与自动控制学院, 杭州 310018)
0 引言
当水下航行体高速运动时,其表面所承受的压力会降低到水的饱和蒸汽压,从而导致航行体表面附近的水汽化形成超空泡,超空泡可使航行体受到的阻力最大减少90%左右[1]。由于超空泡显著的减阻作用,超空泡流动在高速鱼雷、射弹、反潜火箭等水中兵器设计中有着重要的应用[2]。在实际应用中,由于海洋水域环境和发射方式的不同,还会涉及超空泡航行体在浅水区运动,此种情况存在超空泡演化和自由面波动的耦合效应,与深水位(无限水域)下的超空泡有显著差别。近些年,相关的研究成果在国防军事工程和海洋运输工业领域有着重要的应用。
国内外学者对近自由面的空化问题开展了一些研究,其中对自由面与空化水翼的相互影响进行了较多研究,目的是开发出能高速航行的舰船。Dawson等[3]进行了近自由面楔型水翼的空化流动研究,获得了空泡的发展过程。Faltinsen等[4]通过非线性分析研究了水翼在重力作用下自由液面附近的空化流动,研究表明自由面会影响水翼的升阻系数。陈鑫等[5]开展了浅水中二维对称楔的空化问题数值模拟研究,研究表明空化数越小,自由液面的变形范围越大。陈庆任等[6]采用非定常面元法数值分析了近自由面三维振动水翼的水动力特性,研究了不同浸深、航速和振动频率的影响。Zhou等[7]基于OpenFOAM平台开出了用于求解近自由面空化问题的多相流求解器,可以较好的捕捉自由面的变化。王一伟等[8]通过实验和数值模拟研究了近自由面射弹的云状空化问题,获得了空泡的演化特性,分析了自由面对再进入射流和空泡脱落的影响。徐畅等[9]利用实验和数值模拟方法研究了近自由面条件下高速射弹诱导的通气超空泡流动,分析了超空泡的形成机制和减阻效果。施红辉等[10]利用轻气泡发射技术开展了近自由面超空泡射弹实验,获得了超空泡的演化特性和射弹的运动特性,分析了自由面/超空泡的相互作用。张亚涛等[11]利用VOF数值模拟方法开展了近自由面射弹的超空泡流动特性研究,分析了水深对超空泡形态的影响。
目前近自由面的空化问题国内外的研究主要针对单个航行体,而在一些情况下需要在浅水区对水面目标发射超空泡射弹或者超空泡鱼雷进行饱和攻击,这必然涉及到超空泡航行体的串列运动,例如对于大型水面舰艇,往往需要鱼雷群进行饱和打击。因此需要弄清超空泡流场之间的相互作用规律以及自由面的影响,这些问题关系到超空泡武器串列运动的弹道稳定性。因此本文基于求解N-S方程的有限体积法,利用VOF的数值模拟方法计算了近自由面串列航行体的超空泡流场,获得了自由液面影响下串列航行体的超空泡演化特性及流场特性。
1 控制方程及数值方法
1.1 控制方程
本文采用流体体积函数(VOF)模型来捕获相间界面,混合相的连续方程和动量方程分别为
(1)

(2)
其中:xi、xj分别是笛卡尔坐标分量;ui、uj分别为笛卡尔坐标系中的速度分量;P为流场的压力;SM为附加的源相;ρm、μm分别为混合相的密度和动力粘度,满足如下的方程
ρm=αvρv+αgρg+α1ρ1
(3)
μm=αvμv+αgμg+α1μ1
(4)
其中:ρv、ρg、ρ1分别为水蒸气、空气、水的密度;μv、μg、μ1分别为水蒸气、空气、水的动力粘度;αv、αg、α1分别为水蒸气、空气、水的动力粘度,并满足αv+αg+α1=1。
采用RNGk-ε湍流模型[12]对流体的控制方程进行封闭求解,空化是流线强烈弯曲导致的,该模型可以更好地处理高弯曲流线及高应变率的流动。流动中的空化问题采用Schnerr-Sauer空化模型[13]求解。水蒸气体积分数的一般方程为

(5)
其中:Re、Rc分别为水蒸气的蒸发速率和冷凝速率。
当Pv≥P时

(6)
当Pv≤P时

(7)

1.2 数值方法和边界条件
航行体采用的物理模型为直径D=6 mm,长度L=48 mm的柱体,如图1所示。计算域和边界条件设置如图2所示,整个计算域的尺寸为2 500 mm×960 mm,前发航行体距离来流入口为480 mm,两航行体之间的距离为480 mm。定义航行体中心线距离自由面的高度为航行体浸没深度h。计算域左侧边界设定为速度入口,来流速度大小为60 m/s,右侧边界设置为压力出口,上边界设置为Symmetry,下边界设为壁面条件。计算域的网格采用结构网格进行划分,在航行体周围和自由面附近进行加密处理,如图3所示。计算方法中,压力与速度之间的耦合求解采用 Coupled算法,各项体积率离散采用Modified HRIC格式。

图1 航行体的物理模型
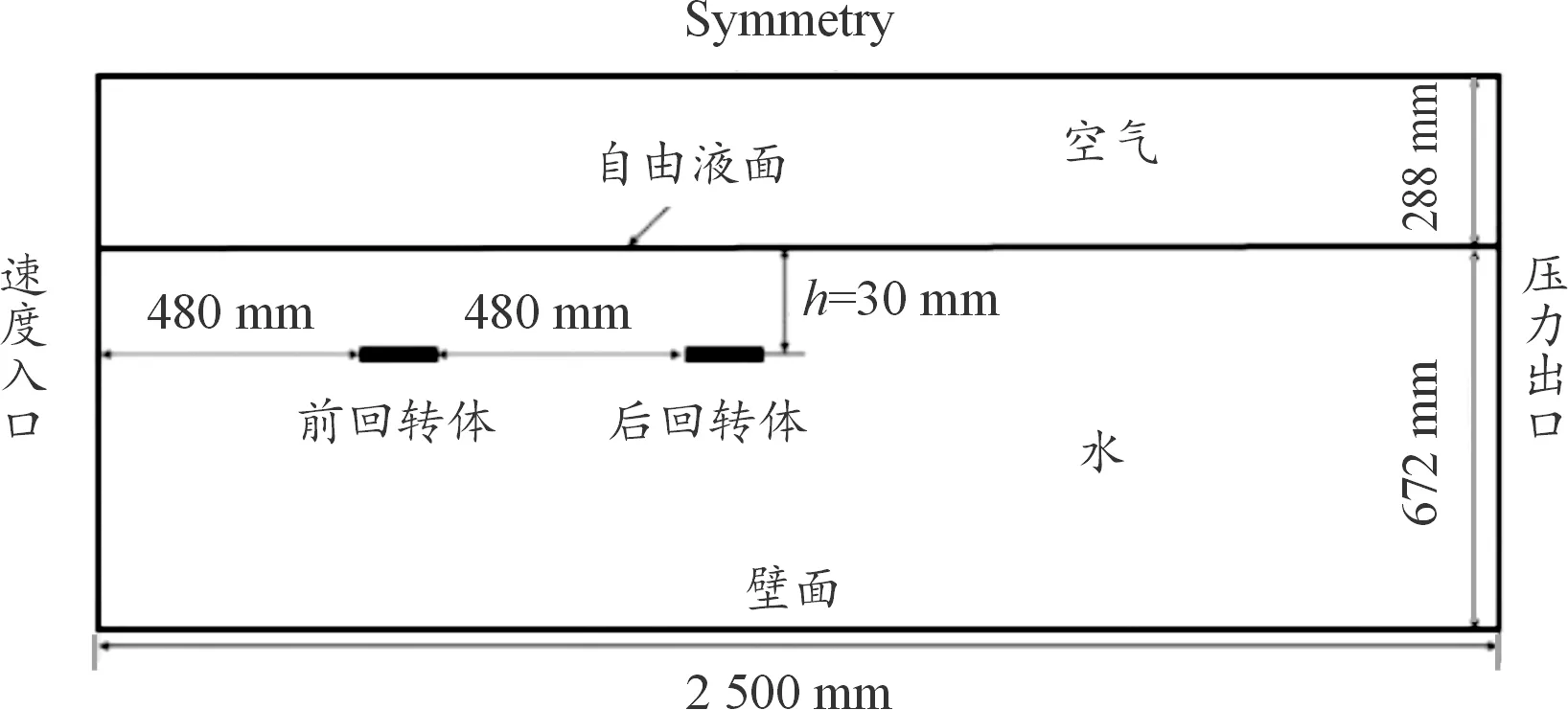
图2 计算域和边界条件设置示意图

图3 网格划分示意图
1.3 数值方法验证
首先进行了网格无关性验证,建立3种不同数量的网格进行计算结果对比,网格数分别为85.8万(case1)、119.3万(case2)、247.1万(case3)。图4为不同网格密度下前发航行体超空泡轮廓的计算结果。由图4可知,随着网格数量的增加,在case2和case3网格密度条件下前发航行体的超空泡轮廓已经基本一致了。综合考虑计算效率和计算结果的准确性,计算时选择了case2的网格。
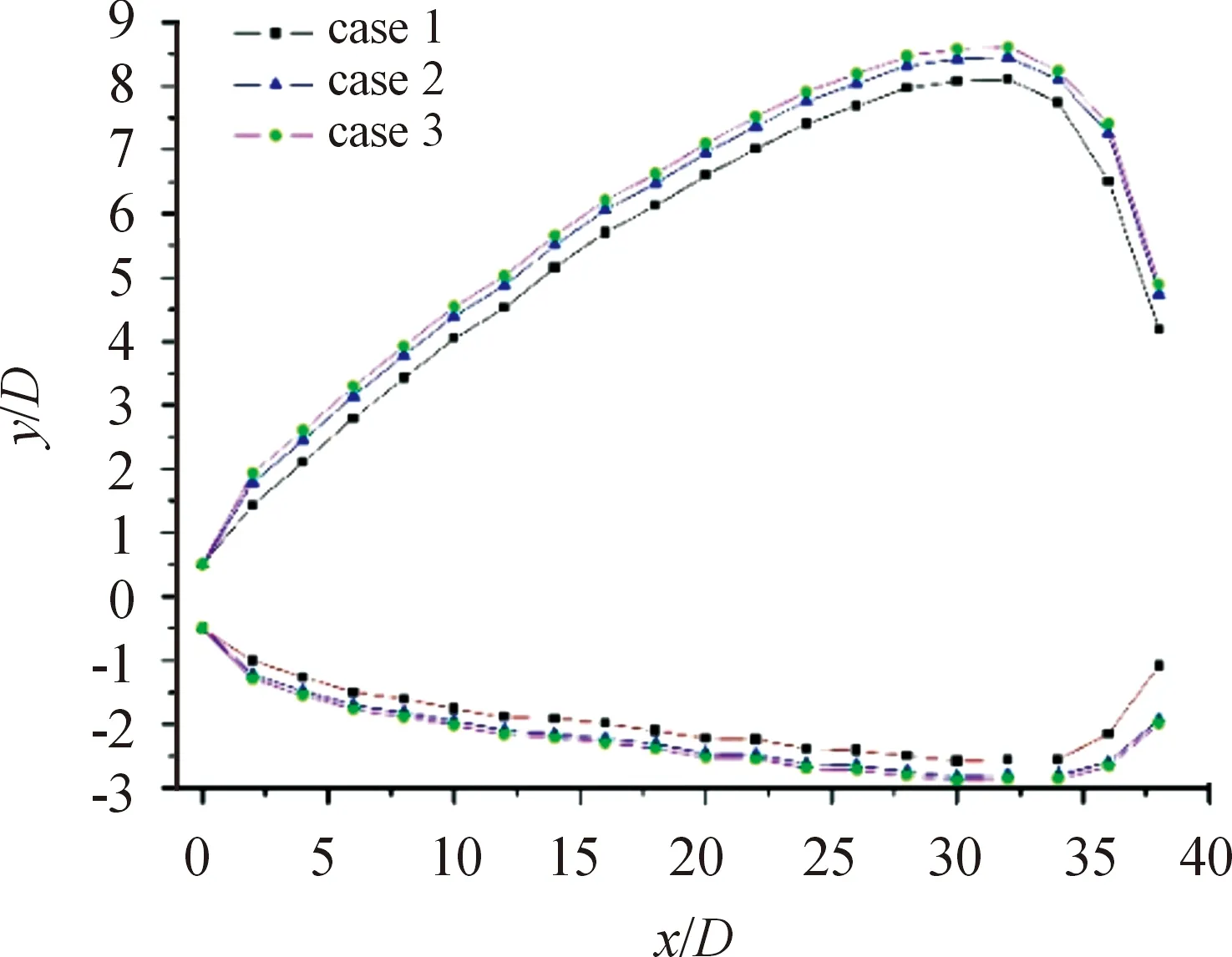
图4 t=4 ms,不同网格数量条件下前发航行体的超空泡轮廓对比
由于目前还没有近自由面串列航行体实验的相关文献,故选择了文献[14]中的近自由面单个航行体实验进行数值模拟方法有效性验证。实验中航行体的浸没深度h为18 mm,速度为38.6 m/s。图5航行体超空泡形态的数值模拟结果和实验结果的对比图。从图5可以看出,两者的超空泡形态有较好的一致性。由于超空泡上表面的水层很薄,实验照片不能明显的辨认出空泡上表面的轮廓,因此只给出了超空泡下表面轮廓曲线的定量对比,如图6所示。由图6可知,整体上两者的超空泡下表面轮廓一致性较好,但是在空泡中部截面附近和空泡尾部附近实验所得的结果稍大于数值模拟结果,但误差在可接受范围内。误差的主要原因:一是实验存在测量偏差,主要为实验拍摄空泡时存在光线折射;二是由于超空泡尾部闭合区域是充满蒸汽、液滴和旋涡的多相流湍流区,还涉及自由面的作用,非常复杂,数值模拟很难精确模拟超空泡尾部滞止及崩溃。

图6 数值模拟获得的超空泡下表面轮廓与实验结果的对比
2 结果与讨论
2.1 超空泡的演化特性分析
图7给出了串列航行体在不同浸没深度下的水相图。从图7中可以看出,4种浸没深度情况下串列航行体的超空泡发展规律是相同的,即随着时间的推移,前发航行体与后发航行体的超空泡流场产生干扰,发生了2个超空泡融合、分离、尾空泡溃灭等流动现象,最后导致后发航行体进入前发航行体的超空泡内部。通过对比还可以发现,串列航行体离自由面越近,自由面的作用效果越强,超空泡形态的上下对称性越差,并且超空泡发生融合的时间越早,当h=30 mm时,串列航行体的超空泡尾部发生了自由面上方空气侵入现象,其他3种浸没深度的工况没有发生这种现象。


(8)
其中:cx0取值为0.827;k为经验常数,其取值范围一般为0.9~1.0;σ为空化数。
超空泡外形轮廓公式为

(9)
图8表示的为t=4 ms时,不同浸没深度的前发航行体的超空泡前沿轮廓与Logvinovich半经验公式的对比。随着浸没深度的减少,自由面作用越明显,超空泡上表面轮廓厚度越大,与Logvinovich半经验公式计算出的空泡轮廓相差越大。在h=300 mm时,超空泡上下轮廓基本对称,与Logvinovich半经验公式计算的空泡轮廓一致性较好。
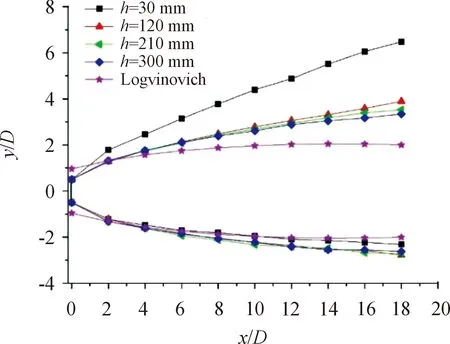
图8 不同浸没深度的前发航行体超空泡前沿轮廓对比
2.2 流场特性分析
图10为不同浸没深度下串列航行体头部中心点压力变化曲线,P为流体的绝对压强,P0为一个标准大气压。从图中可以看出,浸没深度较小时,两发航行体头部中心点压力有一定程度的减小。对比前发航行体和后发航行体的头部压力曲线,在t=6 ms之后,后发航行体头部中心点的压力明显小于前发航行体的;随着时间的推移,后发航行体头部中心点压力逐渐降到最低,约为0.05个大气压,这表明此时后发航行体受到的压差阻力几乎为0,其原因为后发航行体的流场受到前发航行体超空泡流场的干扰,后发航行体头部的流体介质逐渐由液相水变成水蒸气相,水蒸气的密度为液态水密度的0.056%,相差了3个数量级。

图10 不同浸没深度条件下串列航行体头部中心点压力变化曲线
图11给出了t=6 ms时,不同浸没深度下串列航行体的压力云图及其径向压力分布,H1为点到射弹头部中心点前方2*D处位置的竖直距离(竖直向上为负,竖直向下为正)。

图11 t=6 ms时,不同浸没深度条件下串列航行体的压力云图及其径向压力分布
由图11可知,航行体头部前方为高压区,其他部分被一个低压场包裹,低压场压力约为饱和蒸汽压3 540 Pa。随着浸没深度的减小,航行体头部前方的压力沿径向分布越来越不对称,这表明航行体距离自由面越近,航行体上下表面水层对压力场的约束程度差异越大。
图12为h=30 mm时,12 ms时刻串列航行体超空泡附近的流线分布。从图中可知,后发航行体超空泡尾部水层破碎,空泡内部压强小,外界压强大,在内外压差作用下自由面上方的空气被迅速吸入空泡内部,其速度最大可达300 m/s。
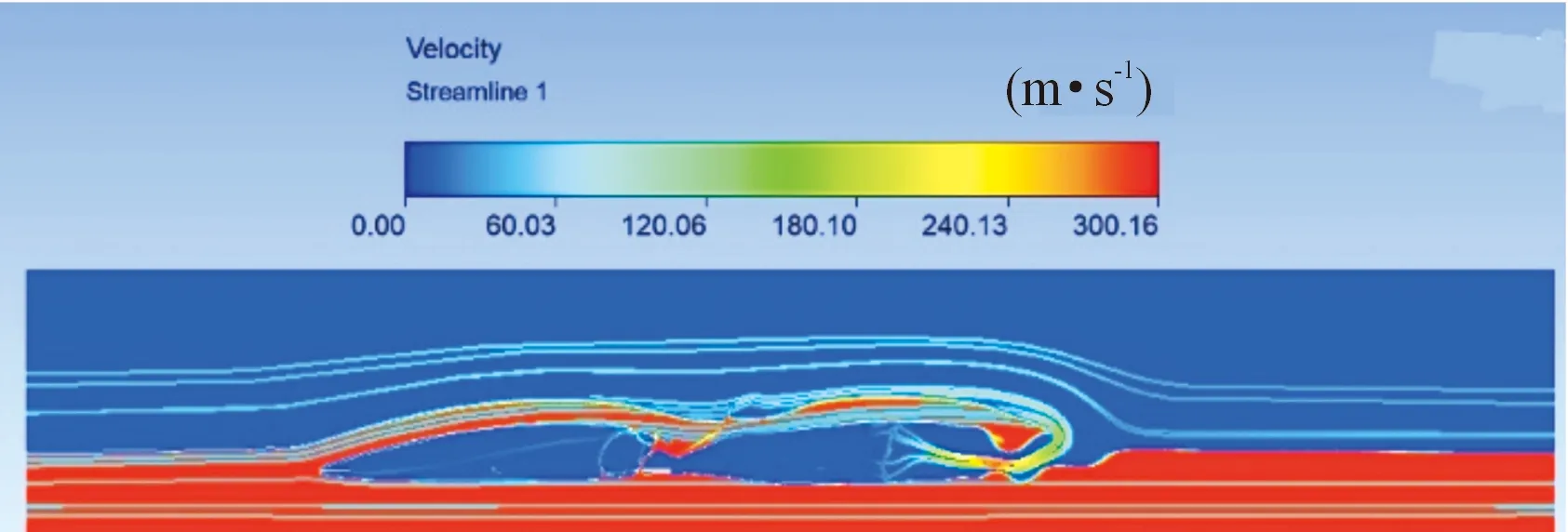
图12 h=30 mm时,12 ms时刻的流线图
3 结论
本文中采用数值模拟方法对近自由面串列航行体的多相流动特性进行了研究,获得的主要结论如下:
1) 近自由面串列双航行体的超空泡演化经历了2个空泡的独立发展、空泡彼此的相互融合与分离、尾空泡溃灭等过程,最终导致后发航行体进入了前发航行体的超空泡内部,使后发航行体受到的阻力减小,表明航行体的串列布置提升了后发航行体的减阻性能。
2) 航行体距离自由面高度越近,其超空泡形态上下对称性越差,与Logvinovich半经验公式计算的空泡轮廓偏差越大,并且自由面波动兴起的波浪特征高度越大。
3) 浸没深度较小时,自由面的作用明显,航行体前端高压区压力分布沿航行体中心线不对称;浸没深度较大时,自由液面的作用大大减弱,航行体前端高压区压力分布基本对称。
