潜体水下强机动损失浮力时挽回操纵仿真研究
2023-09-03张建华王辉波
张 平,胡 坤,张建华,王辉波
(海军潜艇学院, 山东 青岛 266199)
0 引言
随着潜体使命任务的拓展,潜体水下强机动已成常态。潜体在执行任务过程中,为占领阵位、脱敌或者规避敌攻击,通常采用高航速机动、大纵倾变深、大舵角变向,这种高速变深变向的过程被称为潜体强机动。潜体在强机动过程中,由于管路破损、固壳破损等原因,会突发舱室进水险情,导致潜体发生大纵倾,引发潜体深度急剧增大,也称潜体掉深,严重威胁潜体生命力,利用合理有效操纵手段挽回掉深,对于保障潜体生命力、战斗力具有十分重要的战术运用价值。研究水下强机动过程中潜体在损失浮力状态下的运动特性及挽回操纵方法,已经成为提升潜体履行使命任务和提高生存能力亟需解决的课题。本文中以某潜体为研究对象,通过理论分析、模拟仿真,研究了潜体强机动损失浮力过程中的运动特性,分析了不同挽回方法对潜体纵倾、深度等姿态位置信息的作用效果,分析了潜体水下强机动损失浮力的挽回操纵方法。
1 潜体强机动过程
由于任务需求,潜体需在短时间内由某一空间区域向另一空间区域展开,展开过程中潜体以较高航速、较大纵倾进行强机动。强机动过程可以分为3种情况:一是高速变深,二是高速变向,三是在高速变深过程中同时变向。高速变深过程中发生管路破损会引发潜体大幅掉深,特别是首部舱室进水会形成较大首倾,引发潜体大幅掉深,对潜体航行安全影响最大,严重威胁潜体生命力。而单纯变向过程仅涉及方向舵的使用,是在同一水平面内的运动,故该过程中发生方向舵卡舵对于潜体威胁较小。变深同时变向由于方向舵的使用会减小潜体纵倾变化,避免潜体形成较大首倾,为此在该过程中发生管路破损险情造成危害也要小于单纯变深机动。基于以上分析,本文中在挽回方法仿真研究过程中以潜体变深过程中首部舱室进水为例展开研究。表1给出了潜体强机动过程中航速和纵倾角指标,航速高于akn,纵倾角大于k°时即认为潜体处于强机动状态。

表1 强机动参数指标
2 潜体强机动运动及控制模型
2.1 舱室进水数学模型
潜体管路破损后海水由破损处进入潜体舱内,形成自由射流。破损孔口尺寸与潜体所处深度、潜体长度相比非常小,所以潜体破损进水模型就是流体力学中的薄壁口出流模型[1]。
由伯努利方程可以得到进水速率计算公式为

(1)
式中:μ表示破损口滞留系数,一般取0.7;SG1表示破口面积;g表示重力加速度;H表示破口处压头差,初始值是破口深度。
将进水速率积分即可得进水量Q:
(2)
2.2 潜体损失浮力运动模型
本文中采用潜体6自由度强机动水动力数学模型,其纵向、垂向、纵倾及辅助数学模型如式(3)—式(6)所示[2-4]:

(3)
(W-B)cosθcosφ
(4)
(xGW-xBB)cosθcosφ-(zGW-zBB)sinθ
(5)

(6)

潜体损失浮力掉深时会出现攻角较大的情况,运动模型较定常运动模型有区别,本文将水动力按泰勒级数展开到高阶,潜体大攻角水动力高阶展开的表达式如下:

(7)


(8)


(9)
2.3 高压气吹除主压载水舱排水模型
潜体舱室进水时使用高压气系统吹除主压载水舱,高压气进入主压载水舱后,气体膨胀会将水舱内主压载水排出舱外,高压气膨胀率即为主压载水排出速率[6-7]。
假定高压空气是理想流体,高压气膨胀时能量方程可写为

(10)
假设潜体高压气进入主压载水舱后能迅速吹除,此时主压载水舱内气体压力等于出通海口处的海水压力,则有
(11)
式中:P0为实时大气压强;ρw为航行海区海水密度;hki为第i号压载水舱通海口处的深度;g为重力加速度。
联合求解式(10)、式(11),可以得出潜体主压载水舱气体体积膨胀率,该值即为高压空气吹除潜体主压载水舱的排水速率

(12)
(13)
式中:xpi为第i号主压载水舱的纵向力臂;zpi为第i号主压载水舱的垂向力臂;θ为潜体纵倾角;ζ为潜体深度。
对式(12)进行积分,可求得潜体高压气吹除主压载水舱排水量Qi:

(14)
潜体主压载水舱排水产生的浮力为
ΔW=∑Qiρwg
(15)
力矩为
ΔM=∑Qiρwgli
(16)
式中:li是相应主压载水舱距离潜体重心的长度,将以上计算所得浮力及力矩代入式(3)—式(6),即可求得潜体适时运动参数。
2.4 升降舵数学模型
在潜体水下机动过程中,将升降舵摆一个上浮舵或下潜舵时,它会产生舵力及舵力矩。其表达式如式(17)、式(18)所示

(17)
(18)
式中:δ为升降舵舵角,从上式可以看出,升降舵角产生的舵力及舵力矩大小与潜体航速的平方成正比,航速越高,升降舵制造纵倾的能力以及产生正浮力的能力越强。
3 仿真结果与分析
潜体在强机动过程中由于管路破损、固壳破损等原因易引起潜体水下舱室进水,进水主要通过通海管路及其附属阀、填料函等破损引起。同时,水下航行时2个及以上舱室同时发生管路破损进水的情况也比较少见,进水多以单个舱室进水为主。因此,考虑单一舱室发生进水事故的情况,进水时间设定为T秒。根据潜体水下舱室进水数学模型可知,在不同的破损面积下舱室进水速率不同,根据潜体管路实际情况,对潜体最大直径通海管路破损管径进行仿真研究。同样,不同破损深度导致的潜体舱室进水速度也不同,本文以Hm深度作为初始深度进行仿真研究,仿真潜体初始航速采取akn。
由于进水舱室不同所引起的负浮力作用点不同,产生的力矩不同,导致不同舱室进水所引起的潜体运动规律也不同,其中首部舱室破损进水后引起的纵倾力矩较大,易引起潜体大纵倾掉深更具备代表性。因此,在仿真时选取首部舱室作为对象进行研究。在挽回操纵方法上坚持精细化操纵理念,同时由于潜体高压气储量有限,实际工作中在使用高压气进行挽回操纵时应坚持合理使用、节约使用原则,既控制好高压气使用介入时机,又控制好使用时间,在车舵能够挽回潜体姿态与深度的情况下应优先使用车舵进行操纵,在有限航行深度水域则应综合考虑车舵气的使用。
采取应急操纵方法包括以下3种:
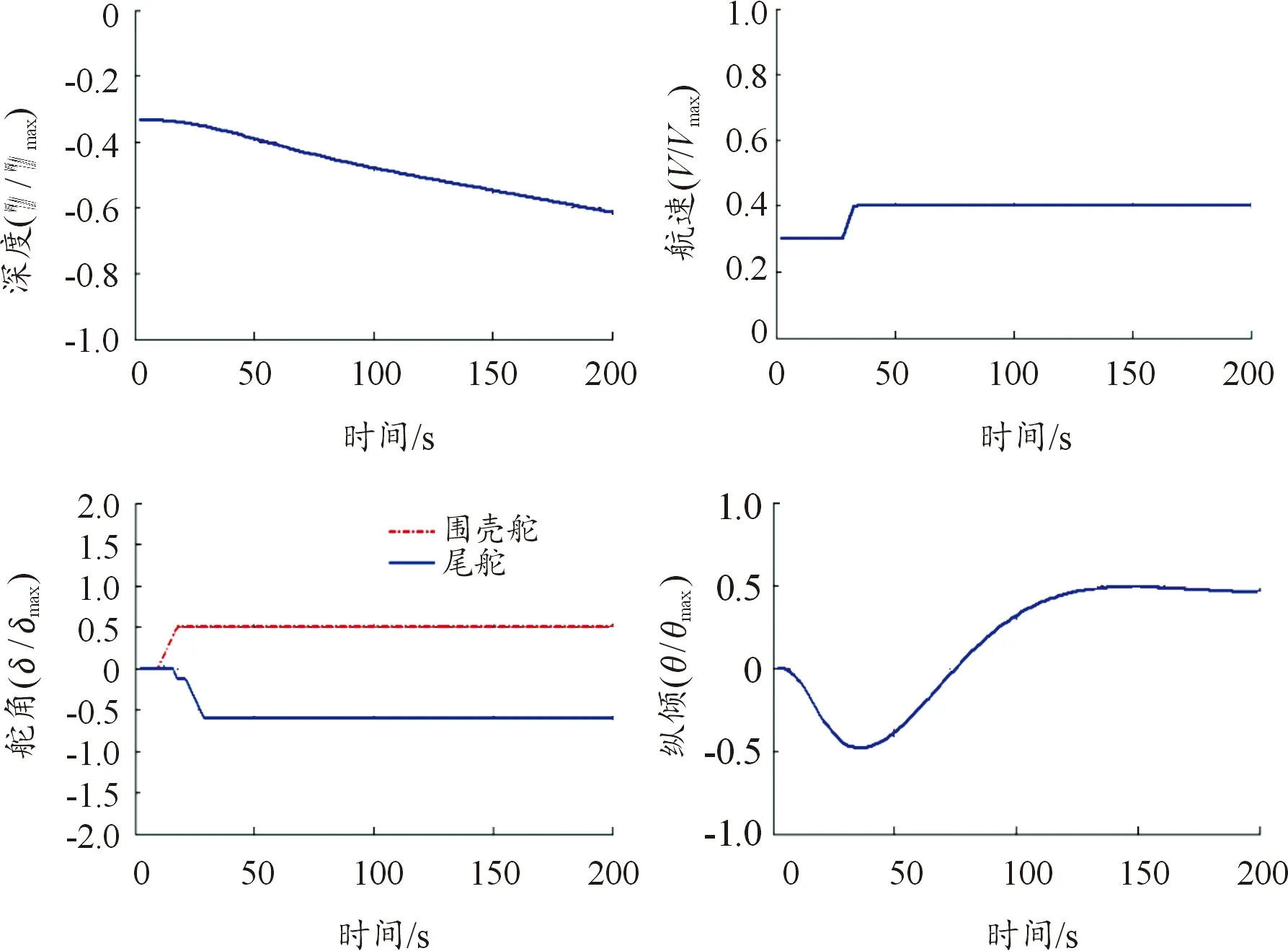
方法A:采取操纵相对上浮满舵+增速至bkn。
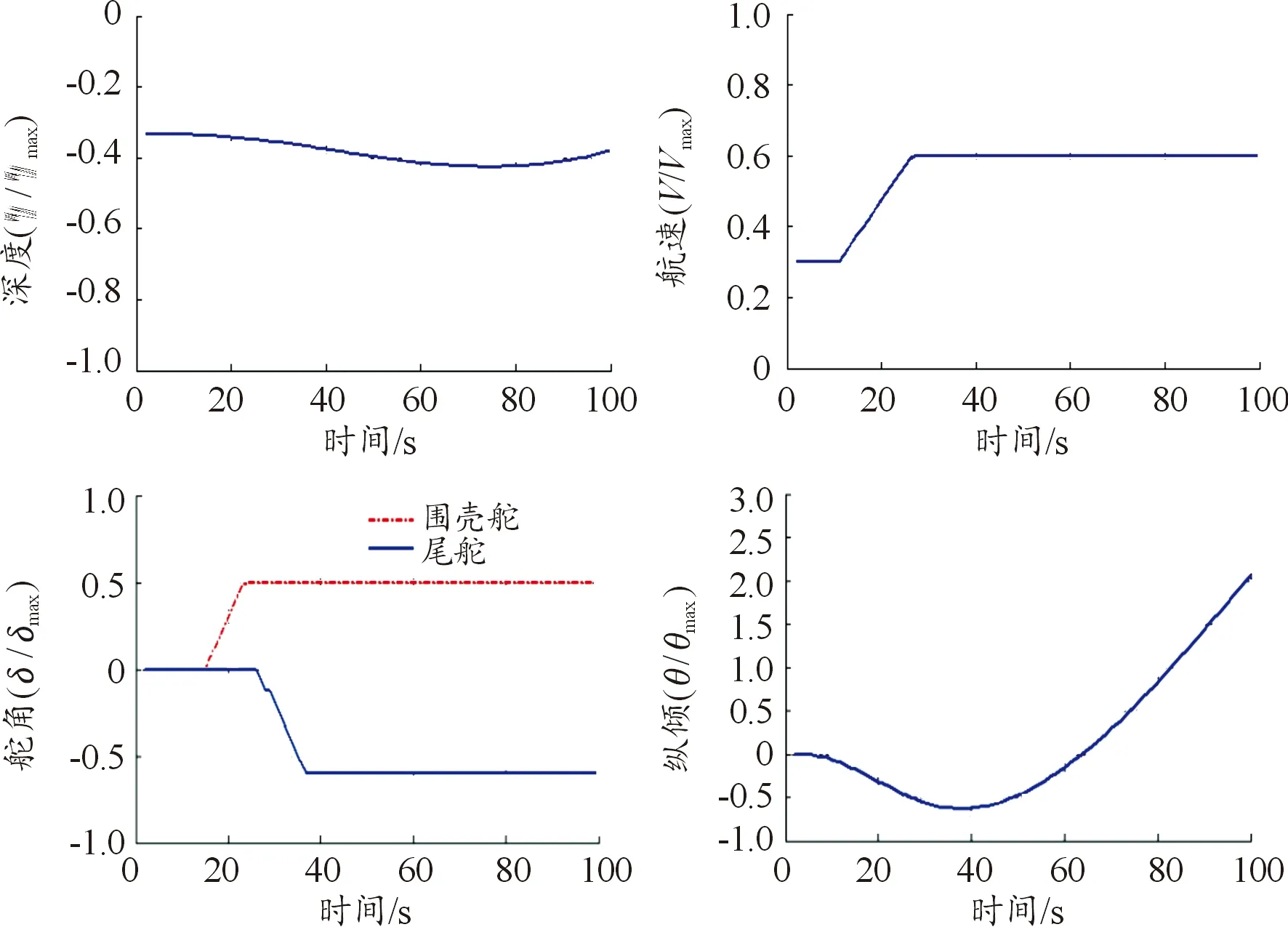
方法B:操纵相对上浮满舵+增速至ckn。
方法C:操纵相对上浮满舵+增速至ckn+首组压载水舱吹除。
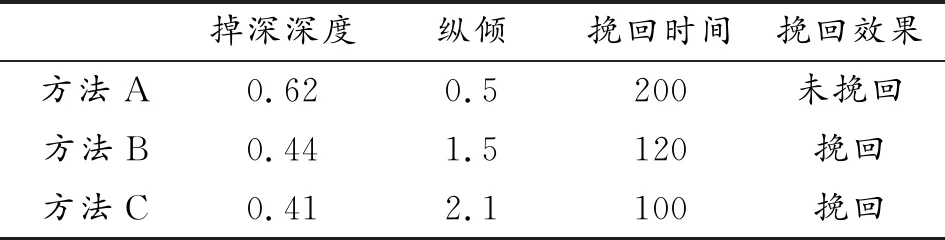
以上速度中a为初始航速,3种挽回方法中所采用航速满足以下关系:a 以上3种挽回操纵方法,归纳起来可以分为两大类,分别采用“车+舵”挽回方法和“车+舵+气”挽回方法。其中方法A与B采用“车+舵”方法主要针对潜体高压气储量不足或航行海区水深较大情况。方法C采用的“车+舵+气”方法则主要针对潜体高压气储量足或者航行海区水深较浅,需要在有限水深范围内挽回潜体情况。通过对损失浮力潜体的运动姿态进行分析,研究潜体挽回方法的作用效果并比较其优劣。 仿真初始条件为:潜体航行速度为akn,初始深度H米,最大直径通海管路破损进水,进水时间t秒,总进水量为m吨。图1为采取操升降舵相对上浮满舵、增速至bkn方法时潜体运动变化曲线。 图1 操相对上浮满舵+增速b kn潜体姿态变化曲线图 图1所示的分别为管路破损采取挽回方法后潜体的深度、航速、双舵及纵倾变化情况。仿真结果表明:在航速akn、A舱进水m吨情况下,潜体出现较大首倾,深度掉深较快。此时采用首尾舵操相对上浮满舵,增速至bkn方法,可挽回部分首倾,对于潜体潜体姿态挽回有一定效果,但是由于A舱进水量较大,在该航速下操相对上浮舵产生的舵力矩不足以制造更大尾倾,舵力无法承载舱室进水量,深度无法保持,在较短时间内发生较大掉深。因此,当潜体在该航行状态下发生管路破损进水时,操相对上浮舵结合增速至bkn的方式无法挽回潜体掉深及姿态。 方案A采用增速至bkn无法挽回潜体纵倾及掉深。由前面分析可知,首尾升降舵产生的舵力及舵力矩与航速的平方成正比例关系。为此,在B方案中继续提高潜体航速至ckn。图2潜体初始运动条件与图1相同,挽回方法采用方案B。 图2 操相对上浮满舵+增速c kn潜体姿态变化曲线 图2仿真结果表明:增速至ckn后,由相对上浮舵制造的纵倾角在120 s内由0.4增大至1.5,在较高航速下双舵造纵倾能力明显提升,潜体掉深由0.64减少至0.44,且有明显挽回深度趋势。以上结果表明在该损失浮力条件下,继续增加潜体航速至ckn后操相对上浮舵产生舵力及舵力矩能够挽回舱室进水所造成的潜体掉深及首倾。 潜体挽回过程中由于受航行海区水深限制,潜体指挥员希望在较短时间、尽量小的纵倾及掉深幅度内将潜体挽回,潜体最大纵倾不得超过最大允许纵倾角,掉深深度不得超过该航行水域最大允许深度。针对以上限定条件,本文在采用操相对上浮满舵、增速至ckn的基础上,利用高压气吹除首组主压载水舱,通过对首组压载水舱的吹除来提供额外的尾倾力矩,同时减小潜体重力,以此来减小潜体掉深幅度。在实际工作中由于系统响应及人因影响,高压气投入使用会有延迟,一般为10 s左右,本文高压气吹除时机设定在损失浮力后10 s,高压气供气时长为15 s。 图3仿真结果表明:增加吹除首组主压载水舱方法后,潜体掉深挽回时间减少至100 s,挽回时间较方案A、方案B大幅减少。挽回过程中潜体纵倾增大至2.1,说明吹除首组主压载水舱对于减小潜体的首倾力矩作用明显。掉深幅度最大至0.41,且在100 s前后潜体航行深度便恢复到破损前航行深度。 图3 操相对上浮满舵+增速c kn +首组吹除潜体姿态变化曲线 由以上仿真可知,综合使用增速、操相对上浮舵以及高压气吹除主压载水舱方法,对于在深度受限水域航行的损失浮力潜体挽回效果较好,能够在较短时间、较小掉深幅度内将潜体姿态控制住。 依据以上3种挽回方法得到的仿真结果,将潜体掉深幅度、纵倾挽回大小、挽回时间综合比较如表2所示。 表2 不同方法挽回值 潜体在水下强机动过程中航速较高,发生损失浮力时必然导致潜体短时间内形成大纵倾及大幅度掉深。本文中通过对仿真结果分析可总结归纳以下挽回操纵方法: 1) 潜体在强机动过程中发生损失浮力时应迅速增速,以此来提高舵效及舵力矩。 2) 不论是在非受限水域还是受限水域,强机动损失浮力时应及早将高压气投入使用,挽回潜体纵倾及掉深。 3) 损失浮力时综合使用增速、操舵以及使用高压气可有效缩短挽回时间,有效减小潜体掉深幅度,挽回潜体危险首倾。3.1 采取方法A进行挽回操纵研究
3.2 采取方法B进行挽回操纵研究

3.3 采取方法C进行挽回操纵研究
4 结论
