基于无人机多光谱遥感的水稻株高估测方法
2023-09-02刘建春陈思文波龙刘宏远李晓峰
刘建春,陈思,文波龙,刘宏远,李晓峰
(1.吉林建筑大学 测绘与勘查工程学院,长春 130118;2.中国科学院东北地理与农业生态研究所,长春 130102;3.中国科学院长春净月潭遥感实验站,长春 130102;4.中国科学院东北地理与农业生态研究所 湿地生态与环境重点实验室,长春 130102)
0 引言
株高作为作物表型信息的重要组成部分,被广泛应用于作物的叶面积指数(leaf area index,LAI)估算[1-2]、生物量估算[3]以及产量估测[4]等,是评价作物长势的重要监测指标[5]。精准、无损、高效地获取水稻株高信息,对于水稻长势的精准监测具有重要意义[6-7]。传统作物株高测量方法主要为测量作物的自然株高、叶枕株高或生理株高等[8]。这些方法效率低、破坏性强,不能满足现代化农业的精准监测需求。
无人机遥感凭借其操作灵活、效率高和无损监测等众多优势被广泛应用于农业精准监测中[9-10]。在株高监测方面,通过无人机搭载传感器获取地面数据并建立株高反演模型的方法,目前已被广泛应用于玉米[11]、小麦[12]等农作物的株高估测研究中,为作物株高提取提供了新方法[13]。
目前基于无人机遥感技术提取株高主要有基于无人机搭载激光雷达构建点云模型提取株高法[14]、利用数码相机采集实验区表面模型相减法[15]以及植被指数株高估测模型构建法等[16]。周梦维等[17]基于无人机搭载小光斑全波形激光雷达(light detection and ranging,LiDAR)反演作物高度,取得了良好成果,但受LiDAR数据处理方法繁琐及设备成本高昂等影响,限制了LiDAR在农业监测领域的发展。相对于LiDAR昂贵的价格,数据处理简单且价格较为低廉的无人机载RGB相机,在作物株高反演研究方向上被广泛应用。刘治开等[18]通过无人机搭载高清数码相机获取冬小麦不同生长期的数字表面模型(digital surface model,DSM),与裸土期DSM做差,最终求得作物高度模型(crop height model,CHM),表明了利用无人机拍摄的高清数码影像可快速估算冬小麦的株高。颜安等[19]通过无人机搭载数码相机获取棉花育种区DSM和高清数字正射影像(digital orthophoto model,DOM),利用克里金插值法提取育种区棉花株高并与实测株高进行回归分析,结果表明,提取的棉花株高与实测株高具有良好的拟合性。Kawamura等[20]采用地面采样距离为1 cm的无人机影像提取泰国旱稻的高度值并用简单的线性回归进行分析,测量株高与估算株高最佳决定系数(R2)为0.712,均方根误差(root mean square error,RMSE)为9.142 cm。在构建作物DSM时,零星的水稻叶尖点云数据可能会被认定为异常值被剔除,而采用植被指数(vegetation index,VI)株高估测模型估测作物株高可避免这种问题。李燕强等[21]基于不同品种冬小麦光谱指数株,构建了冬小麦株高估测模型,估测模型R2=0.85,验证模型R2和RMSE分别为0.86和4.27 cm。
目前在基于无人机遥感技术估测作物株高方向上,主要体现于对生长环境稳定的陆生作物的研究,而对于水稻这种禾本科一年生水生草本作物还鲜有研究。本研究基于无人机搭载一体式多光谱成像系统获取的研究区DOM、DSM和无人机多光谱影像数据,结合水稻株高实测数据,主要研究以下问题:探究基于多光谱遥感技术估测水稻株高的可行性;对比不同株高估测方法提取水稻株高的精度。
1 数据与方法
1.1 研究区概况
研究数据于吉林省大安市水稻示范区采集,该地地处吉林西部,属中温带季风气候,土质湿润、土地肥沃,适合水稻的大面积种植。
研究区内水稻种植面积为13.6 ha,种植的水稻为在东北地区具有良好代表性的中晚熟香型水稻品种——吉宏6号,生育期约138 d。同时,该地为了对比在不同土壤条件下水稻生长适应性,每个稻田内都经过了不同的处理,所以不同稻田内的水稻长势各不相同,但同一稻田内水稻株高变化不大。在各稻田内远离田埂的地方共设置48个采样小区,以采集具有一定群体代表性的研究数据。小区分布位置如图1所示。

图1 研究区概况及采样小区空间位置分布
1.2 数据获取与预处理
1)地面数据获取。于8月15日对采样区内的株高进行测量,随机选择采样区内3株未倒伏的水稻,用卷尺测量自然状态下水稻根部到水稻最顶端的距离(图2),取3株水稻株高的均值作为采样区内水稻的实测株高。

图2 水稻株高测量示意图
2)无人机多光谱数据获取及预处理。无人机多光谱数据采集与地面数据获取同步进行。本次实验所用的数据采集设备为大疆创新科技有限公司生产的精灵4多光谱版无人机(P4 Multispectral,P4M),其采用的三轴稳定云台使得无人机在高速飞行的状态下也能拍摄出稳定的画面。同时,RTK高精度定位结果实时补偿至相机CMOS中心,实现了精准定位。集成6个型号为FC6360的1/2.9英寸CMOS影像传感器,可排除环境光对数据采集的干扰。其中,1个彩色传感器用于常规可见光(RGB)成像,5个单色传感器用于常规多光谱(红、绿、蓝、红边、近红外)成像,相机单个传感器有效像素208万,分辨率为1 600像素×1 300像素,光圈为f/2.2,焦距为6 mm。

表1 无人机多光谱影像采集系统参数及飞行设置
将采集后的影像数据导入大疆智图内进行影像数据拼接处理,得到地面采样距离为0.015 m的5个波段的反射率数据以及DSM和DOM。根据测量软件ArcGIS10.6,结合DSM,利用编辑工具绘制研究区的面矢量文件,结合DSM和DOM通过点绘水面点法提取水面高程,将高程赋值到面矢量文件中生成研究区内数字高程模型(digital elevation model,DEM)。利用编辑工具绘制采样小区的面矢量文件,使用统计工具计算小区内水稻反射率均值作为采样小区的水稻冠层反射率,具体的操作流程如图3所示。

图3 无人机影像数据预处理流程
1.3 分析方法
将植被指数与水稻株高进行相关性分析,根据皮尔逊相关系数(Pearson)评价植被指数与水稻株高间的相关性并优选植被指数。基于优选后的单个植被指数采用一元线性、指数、对数及幂函数回归方法与实测株高进行回归分析。分别利用逐步回归、岭回归和随机森林回归进行多植被指数水稻株高估测模型的构建。本次实验所用的模型均在SPSSPRO中完成。
1.4 精度评价
采用决定系数R2和RMSE对水稻株高估测模型进行评价。R2越接近1,表明方程的自变量对株高的解释能力越强,同时与之对应模型的RMSE越小,观测值与真实值之间的偏差越小,表示对株高的估测精度越高。
2 结果与分析
2.1 水稻株高特征分析
本次实验共采集了48份水稻实测株高数据,其中随机选取32份数据作为建立水稻株高估测模型的训练集,剩余16份数据作为检验模型精度的验证集,各样本的特征统计结果如表2所示。

表2 水稻株高的统计特征
其中训练集水稻株高在68.33~121.50 cm之间,相对于总样本来说分布均匀、区间合理,变异系数为0.157,呈轻度变异,用于构建的模型适应性强。验证集相比总样本变化不大,能够有效地评价模型估测精度。
2.2 植被指数与水稻株高相关性分析
植被指数是两个或多个波段反射率间的不同组合,可根据植被指数对地表植被进行精准、有效的分析。目前已有多种植被指数被发现并应用于农业研究当中[22],本实验共选取28种常见的植被指数用于水稻株高反演研究,主要指数的计算公式可参考文献[23-25]。
将选取的28种植被指数分别与水稻株高进行 Pearson相关性分析,分析结果如图4所示。所选择的28种植被指数与水稻株高相关系数绝对值均大于0.5,相关系数绝对值最高为0.800,对应植被指数为MCCCI,相关系数绝对值最低为0.522,植被指数为NPCI。其中OSAVI、NDRE、DATT、SAVI、MSR、EVI、EVI2、NDVI、CIre、TNDVI、MTCI、GOSAVI、SR、RVI、TVI、DVI、GDVI、GNDVI、SIPI、NGI与水稻株高的相关系数介于0.7~0.8之间,GRVI、CIg、VARI、PSRI与水稻株高的相关系数绝对值介于0.6~0.7之间,NRI、NDGI、NPCI与水稻株高的相关系数绝对值介于0.5~0.6之间,说明所选的植被指数与水稻株高间存在相关关系,可以择优选取植被指数建立水稻株高估测模型。

图4 多光谱植被指数与水稻株高相关性矩阵
根据图4的分析结果,将相关系数绝对值按从大到小排序,选择排在前50%的14种植被指数作为本次实验的优选指数,结果如表3所示。这些植被指数与水稻株高的相关系数绝对值均大于0.7,与水稻株高呈0.01级别显著性水平相关关系,可以进行建模分析。

表3 多光谱植被指数与水稻株高相关系数绝对值及排序
2.3 水稻株高估测模型的构建
选取表3中的植被指数,分别利用一元线性、指数、对数、幂函数回归方法与水稻株高进行回归分析,并根据模型R2选择拟合程度最好的回归方程,分析结果如表4所示。
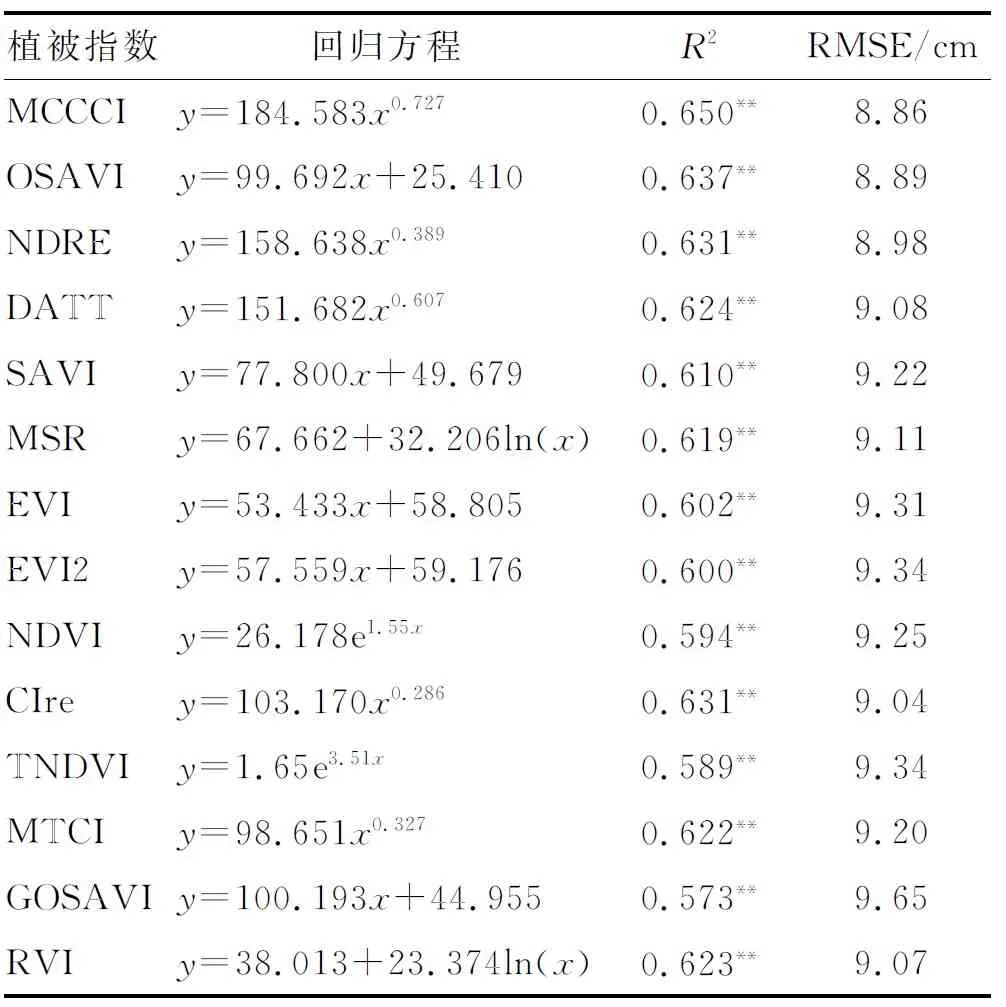
表4 优选植被指数与水稻株高一元回归模型
根据表4可以看出,所有回归模型均有较好的拟合性,整体R2在0.573~0.650之间,RMSE在8.86~9.65 cm之间,其中MCCCI与水稻株高建立的幂函数回归模型效果最好,R2为0.650,RMSE为8.86 cm;植被指数GOSAVI与水稻株高建立的一元线性回归模型效果最差,R2为0.573,RMSE为9.65 cm。所以,根据R2最大及对应的RMSE最小原则,认为基于MCCCI构建的幂函数回归水稻株高估测模型效果最好,回归方程如式(1)所示。
H=184.583MCCCI0.727
(1)
2.4 基于岭回归模型估测水稻株高
选取与水稻株高相关性系数绝对值排在前50%的植被指数作为自变量用于构建水稻株高岭回归估测模型。根据回归结果,手动剔除与水稻株高相关性较低的植被指数,直至方程所用植被指数与水稻株高呈显著性水平强相关关系,结果如表5所示。
模型Ⅵ和模型Ⅶ的R2分别为0.703和0.704,RMSE均为8.04 cm,使用的植被指数相对最少但模型的拟合效果和精度变化不大,且输入自变量与水稻株高均呈0.01水平强相关关系,所以认为采用植被指数MCCCI和SAVI构建的岭回归株高估测模型效果最好,模型方程如式(2)所示。
H=33.947+95.767MCCCI+38.921SAVI
(2)
2.5 基于逐步回归模型估测水稻株高
根据分析结果,选取对应的14种植被指数作为自变量,实测株高作为因变量进行水稻株高逐步回归模型的构建,结果如表6所示。结果表明,在模型不断剔除与水稻株高不相关变量后,得到模型Ⅰ和模型Ⅱ的R2分别为0.640和0.710,RMSE分别为8.86 cm和7.95 cm。根据R2最大及对应的RMSE最小原则,认为采用植被指数MCCCI和EVI2构建的逐步回归水稻株高估测模型效果最好,模型方程如式(3)所示。

表6 优选植被指数与水稻株高一元回归模型
H=33.167+108.069MCCCI+29.659EVI2
(3)
2.6 基于随机森林估测水稻株高
根据表3的筛选结果,将筛选后的14种植被指数作为随机森林回归模型的输入变量,输入到模型中进行重要性分析,首次重要性分析结果如图5所示,植被指数MCCCI、SAVI、EVI、EVI2在模型中所占重要性超过10%。剔除重要性小于10%的植被指数继续重复上述工作。随着输入变量的减少,模型中剩余的植被指数所占重要性会相应提高,因此用于剔除植被指数的重要性占比阈值也要逐步增加,所以继续剔除重要性占比小于20%、30%的不重要变量,共构建了4个随机森林水稻株高估测模型,结果如表7所示。

表7 随机森林水稻株高估测模型精度对比

图5 光谱植被指数重要性分析图
根据表7可以看出,虽然在用于构建随机森林回归模型的输入变量减少,但是模型精度逐渐提高,最好的随机森林水稻株高估测模型为模型Ⅲ,采用植被指数MCCCI、SAVI、EVI2重要性占比分别为26.20%、41.80%和32.00%,模型R2为0.946,RMSE为3.44 cm。
2.7 基于DSM提取水稻株高
地面数字高程模型DEM由拼接生成的地面数字表面模型DSM结合高清数字正射影像DOM经ArcGIS10.6赋值生成。通过式(4)计算DSM与DEM间的差求得水稻株高模型CHM0。
CHM0=DSM-DEM
(4)
通过ArcGIS10.6提取采样小区内CHM0的平均值作为该采样小区的株高。由于稻田内水的存在,提取后的采样小区株高只是水面以上的株高,所以还需要选取与植被指数构建水稻株高估测模型相同的训练集数据,将水稻水面株高与水稻实测株高分别进行一元线性回归、指数回归、对数回归和幂回归,并筛选出最优回归模型,结果如表8所示。

表8 根据DSM提取水面以上水稻株高估测模型
2.8 模型的检验
将剩余的16份数据作为验证集代入到各个模型中,并统一以一元线性回归方程检验预测值与真实值间的拟合程度计算方程的决定系数和均方根误差,结果如图6所示。R2在0.876~0.666之间,RMSE在5.15~8.44 cm之间。其中采用植被指数MCCCI与水稻株高构建的幂函数水稻株高估测模型效果最好,R2为0.876,RMSE为5.15 cm;随机森林水稻株高估测模型拟合精度较低,R2为0.666,RMSE为8.44 cm。综上所述,可以确定在本次实验中,采用植被指数MCCCI构建的幂函数水稻株高估测模型效果最好,拟合精度最优,整体实验区株高估测结果如图7所示。

图7 实验区水稻株高估测结果
3 讨论
随着无人机遥感技术的普及,其被广泛应用于农作物株高估测当中,但在水稻的整个生育期内,稻田内大部分时间都有水的存在且水深不一,这给水稻株高估测研究带来极大的困难。基于DOM、DSM可以根据赋值做差法提取水稻的水面株高,而要想获得真正的水稻株高还要进行二次建模,最终得到的结果与前人的结果基本一致。但是,根据此方法估测水稻株高,步骤极为繁琐,且存在误差。在根据DOM、DSM提取水面点时,考虑到每个稻田内都为独立的水平面,所以直接将去除异常值后每个地块的数据求均值作为对应地块的水面高程,通过对面文件赋值生成最终的DEM,但受水稻枝叶以及水面漂浮物的影响,提取到的点可能并不是真实的水面点,导致生成的DEM与实际值有误差,最终会对水稻株高的估测精度造成影响。同时,由于无人机根据点云数据生成DSM,而水稻叶尖处点云数据比较稀疏,也极有可能在影像拼接时就被系统认定为噪声去除,因此基于DSM提取水稻株高具有很大的局限性。
植被指数能够反映水稻长势的优劣,而水稻长势不同则生物量不同,因此能够建立光谱指数与株高的关系,进而反演水稻株高。本研究共采集了48份无人机多光谱遥感数据和地面实际观测数据,随机选择32份数据结合植被指数与水稻株高构建水稻株高估测模型,并将剩余的16组数据作为验证集带入到估测模型中进行检验,R2在0.666~0.876之间,表明基于无人机多光谱植被指数可以构建水稻株高估测模型。
其中采用随机森林回归模型构建的水稻株高估测模型训练精度比较好,R2为0.946,但是验证模型的拟合度和精度很差,这可能是机器学习需要大量的样本来实现模型的泛化能力,而本次实验只选择了38组数据作为训练集,致使随机森林株高估测模型效果不好。想要训练一个精准的随机森林估测模型需要一个庞大的数据用于模型的训练,对于大面积水稻株高估测研究,庞大的工作量给这项工作带来了一定的负担,因此需要一个所需数据少且估测精度高的模型来完成此项工作。
本研究发现,采用改良后冠层叶绿素含量指数MCCCI构建的幂函数水稻株高估测模型结果最好,R2为0.876,优于其他模型,且该模型仅采用一个植被指数,需要的数据量少,具有简洁、高效,引入误差少,实用性强的特点。水稻长势不同叶绿素含量也不同,植被指数MCCCI的值也会因此而变化,本实验用于建模的数据能够代表部分生长阶段的水稻长势,因此该模型可以用于部分生育期内水稻株高的估测。
虽然本次实验取得了良好的结果,但是,受不同品种水稻植株性状以及生物量等因素的影响,相同长势下不同品种水稻的光谱指数值会有差别,因此该模型对于其他品种的水稻株高估测可能还具有局限性。若想提高该模型的普适性,可参照本文的理论方法,采集更多品种、更全长势的水稻数据,以获得一个高通量水稻株高估测模型,进而还可以进行感兴趣点水稻株高的估测,即输入某点位的光谱数据,可直接反演出该处水稻株高。该技术的成熟发展,对于农业的精准监测有重要的实际意义。
4 结束语
本研究以无人机搭载多光谱传感器获取水稻种植区域单通道反射率数据、DOM、DSM、DEM数据,并基于上述数据计算多种植被指数,结合地面实测水稻株高进行株高估算模型的构建。基于上述过程得出以下结论。
1)基于无人机多光谱遥感数据获取水稻冠层光谱反射率数据并计算植被指数,最终构建的水稻株高估测模型精度良好,模型验证集最好结果R2=0.876,RMSE=5.15 cm,可以用于水稻株高的估测,为提取水稻株高提供了新方向。
2)基于植被指数MCCCI构建的幂函数水稻株高估测模型(R2=0.876,RMSE=5.15 cm)优于基于DSM提取的水稻株高估测模型(R2=0.774,RMSE=6.99 cm),优于基于植被指数MCCCI、SAVI、EVI2构建的随机森林的水稻株高估测模型(R2=0.666,RMSE=8.44 cm),可用于部分长势水稻株高的估测和对比。
致谢:文章中实验基地和实测数据由吉林省大安市水稻示范区提供,无人机数据由任旭阳、王智、丁天雨采集,同时李雷、王锡刚、李鑫彪、魏佳佳、陈嘉惠、王彬在数据处理中给予了技术指导。在此,对各位提供的帮助表示由衷的感谢。
