基于柔顺机构的双驱动仿生水母设计
2023-09-02杨恩慧张金诺崔静宇权双璐
高 昂,杨恩慧,张金诺,崔静宇,权双璐,胡 桥
(西安交通大学 机械工程学院,陕西 西安 710049)
0 引言
立足于现阶段我国建设海洋强国的战略规划,研制水下智能装备、构建水下技术平台是我国发展海洋科技的前景目标。仿生机器作为水下智能装备的重要分支,具有良好的环境适应性[1],在海洋资源勘探、海洋环境治理、海洋信息检测等实践领域具有巨大的潜在应用价值。水母作为海洋中一类重要生物,相较于鱼类的尾鳍式和背鳍式游动,具有一种特殊的喷射推进模式[2]。通过肌肉的快速收缩改变自身腔体体积完成排水,利用喷射的反作用力运动,且能有效利用流场能量,是一种高效节能的推进方式,兼具灵活性和平稳性,水母以其特殊的运动模式在仿生学领域获得了广泛的关注和研究[3]。意大利微工程研究中心研制了一种通过磁铁磁力作用排水驱动的微型仿生水母,可以达到37 mm/s的速度[4];美国弗吉尼亚理工学院研制了一款基于SMA的伸缩变形驱动的仿生水母机器人,其最大运行速度可达54 mm/s[5];德国FESTO公司研制的AquaJelly机器水母依据鱼鳍设计触须结构,带动末端鳍片划水推进[6];中国科学院自动化研究所的肖俊东和喻俊志研制了一款基于多连杆机构的仿生机器水母[7]。
国内外学者对仿生水母的相关研究仅限于单一驱动方式,推进效率不高,并且缺乏对水母感知功能的实现。因此,本文以机电系统设计和控制功能实现为目标,研制了一种扑动–喷射双驱动模式的仿水母机器人,可实现水下全向运动,并且搭载的趋光控制系统可实现水下探测及环境感知的功能,为构建水下探测平台提供了一种集高效性、平稳性、环境适应性于一体的水下智能装备。
1 整体结构设计
水母主要结构由腔体和触手组成,通过肌肉收缩改变腔体体积完成排水推进的运动过程,触手呈辐射对称状分布于伞状腔体四周,部分水母具有感知环境中光源变化的功能。
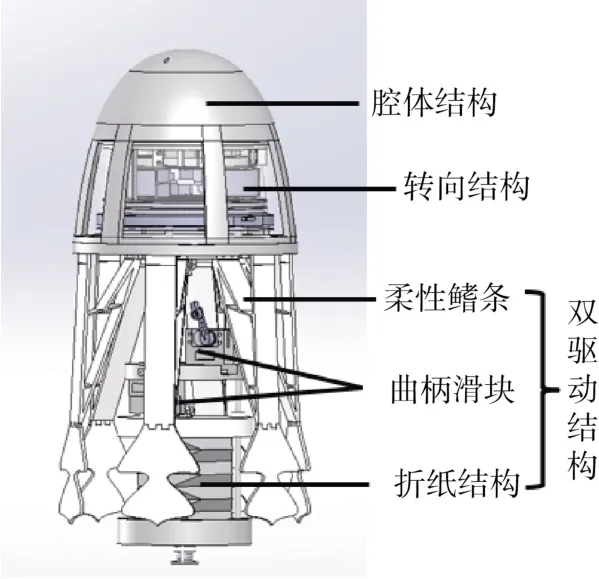
图1 整体结构设计Fig.1 Overall structure design
本文针对仿生水母的推进效率问题,提出了一种基于双驱动推进结构的仿生水母,可有效提高推进效率。仿生水母由仿水母主控舱、柔性扑水鳍条[8]、折纸喷射机构、转向机构和趋光控制系统组成,通过舵机驱动的曲柄滑块实现水母扑动–喷射双驱动的高效运动方式,由舵机驱动的转向结构结合陀螺仪传输的数据,通过改变重心实现闭环的水中姿态调节;以仿生水母为基体,模拟水母趋光特性,结合机器学习算法构建趋光控制系统,可以实现朝向光源运动的功能。
1.1 腔体结构
伞状腔体是水母承受运动阻力的主要部分,仿照缘叶水母的长圆形腔体结构具有低阻力系数,使水母具有更高的游动速度。并对腔体结构参数进行优化,通过CFD仿真对不同径高比下腔体结构的阻力系数分析,设计最优结构的径高比约为0.55︰1,优化后的最小阻力系数为0.011。

图2 腔体压力分布云图Fig.2 Cavity pressure distribution cloud map
采用镂空肋板的设计在保证结构刚度的同时减轻重量,保证了水母运动的灵活性和高效性。同时,将腔体结构作为控制单元核心,内部大空间密封舱设计,可集中放置电气控制硬件设备。

图3 腔体结构Fig.3 Cavity structure
1.2 双驱动机构设计
自然界中水母主要通过裙带摆动和改变内腔海水容量的方式实现运动。因此,仿生水母采用鳍条扑动和折纸喷射双驱动方式,分别模拟水母的裙带弯曲和内腔排水。并通过由舵机带动的具有急回特性的偏置曲柄滑块机构,分别带动鳍条结构与折纸结构,来模拟水母运动时鳍条缓慢舒展而迅速收拢,内腔缓慢吸水而迅速挤压喷射的特点,从而实现鳍条的“慢展快缩”以及折纸的“慢上快下”。
1.2.1 柔性鳍条结构设计
部分水母触手具有推进及改变运动方式的功能,基于此设计刚柔结合的鳍条结构,呈辐射状对称分布于腔体周围,采用内外双片式结构,外片固定,内片固连曲柄滑块实现上下运动,带动鳍条产生形变实现摆动推进,根部设置大面积扑水式鳍,增大了鳍条的尖端位移幅值并在水下产生涡流从而提高推进力及推进效率。

图4 双片式柔性鳍条Fig.4 Two-piece flexible fin ray
将鳍条的三维模型导入 Adams 中,给定鳍条的运动参数建立驱动模型,对外片添加固定约束,内片添加位移约束,限制鳍条的位移和转角,并得到运动位移及速度图,证明所设计的双片式鳍条结构具有柔性变形能力。
仿水母机器人由鳍条扑动产生的反向推进力驱动,推进力的大小直接影响仿生水母的运动性能,鳍条摆动所能产生的推进力取决于流体性质和鳍条参数:
式中:F为鳍条表面所能产生的推进力;ρ为流体密度;Cd为阻力系数;S为鳍条迎水面面积;v为相对于流体的运动速度并且受转动角度影响;vu为运动方向单位矢量,得到鳍条转动角度θ与推进力F(t)关系。

图5 Adams柔性仿真Fig.5 Flexible simulation of Adams
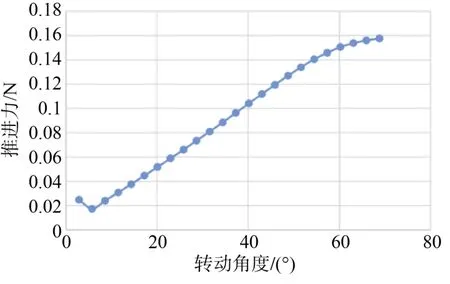
图6 推进力–旋转角度关系曲线Fig.6 Propulsion force-rotation angle relationship curve
鳍条摆动过程中,提供的推进力随自身的旋转角度增大而增大,且具有趋于平稳的峰值,为了获得最大的推进力,设置鳍条最大旋转角度为60°,此时阻力系数为1.126 3,平均最大推进力为0.082 3 N,鳍条结构可提供的最大推进力为0.493 8 N。

图7 鳍条静力分析图Fig.7 Static analysis diagram of fin rays
柔性鳍条结构由舵机驱动的曲柄滑块机构提供动力,而偏置曲柄滑块机构的急回特性可提高鳍条摆动速度,合理选择曲柄滑块机构的参数对优化仿生水母的运动性能具有重要意义。通过workbench静力学仿真确定连接于鳍条内片的滑块在柔性鳍条旋转°
60时的运动行程为h=71.5 mm。设定偏置曲柄滑块的偏距为e= 27.0 mm,极位夹角为θ= 45.1°,对应行程速比系数K= 1.668 7,机构运动方程如下:
式中:α为曲柄与水平面的夹角。求解运动方程后得到曲柄滑块参数:
1.2.2 管状折纸结构设计
根据研究,自然界中部分水母通过收缩外壳挤压内腔的方式喷射推进自身前进,水流喷出产生的推力将使水母沿身体轴向方向运动。管状折纸结构[9]所能提供的推进力大小与折纸单元结构参数和流体性质有关
式中,F为折纸结构喷射所产生的推进力;ρ为流体密度;1a、a2为折纸单元设计参数;S为出水口面积;v为折纸结构收缩速度。根据相关研究[10],折纸单元的优化设计以最大储水量和输出刚度为优化目标,优化结果表明最优折纸结构的1a、a2比值约为1.75︰1,因此设计的折纸结构参数为a1=50mm ,a2=28mm。确定折纸单元参数后,提供的推进力大小仅与出水口面积和收缩速度有关,而受舵机驱动的折纸结构的收缩速度仅与其高度有关,通过对不同出水口面积和高度的折纸结构进行流体仿真,确定折纸结构参数如下:
根据设计结果建立折纸结构模型,其上部平台连接进水单向阀和曲柄滑块机构,利用滑块上下运动实现折纸结构的轴向拉伸和压缩,下部固定平台则安装有出水单向阀。

图8 折纸机构Fig.8 Model of origami mechanism
此时,折纸结构可提供的最大推进力为0.180 2 N。通过CFD仿真获得设计的折纸机构的推进速度约为24 mm/s。
设定偏置曲柄滑块的偏距为e= 27.0 mm,极位夹角为θ= 55.5°,对应行程速比系数K= 1.890 8,求解运动方程后得到折纸结构的曲柄滑块参数:
1.2.3 双驱动机构协同性能
柔性鳍条结构和管状折纸结构分别由对应的曲柄滑块机构驱动,其提供的推进力分别为0.493 8 N和0.180 2 N,推进比例约为2.7︰1,采用同向舵机使得双驱动结构同时进入工作行程以保证最大的推进效率,能够实现持续高效推进。
1.3 转向机构
自然界中部分水母会通过控制伞体顶部气囊里的充气量从而改变运动方向,转向机构通过舵机带动2个重物块进行旋转运动,实现水母重心的变化[11],当重力与浮力不再共线时,水母将产生旋转趋势,从而改变倾斜程度和运动方向,在一定范围内改变水母的重心位置来模拟水母气囊内充气量的变化,从而实现水母在水下全向运动的目标。

图10 转向机构Fig.10 Steering mechanism

图11 重心调节变化图Fig.11 Adjustment of center of mass
通过配置重物块的位置、重量,偏转范围和摇柄长度,得到仿生水母重心的变化图像,最终确定重物块的重量为0.935 kg,可调节旋转半径约为65 mm。在此基础上,仿生水母的理论偏转角为44.982 6°,考虑安全系数为1.5,得到仿生水母实际偏转角度约为30°。
2 运动控制与趋光感知
2.1 电气控制系统设计
仿水母机器人以STM32F411单片机作为控制核心,核心运算能力较高,可以实现接受仿生水母的大量传感数据,并对大量数据进行实时且精确的运算,从而向运动结构发出指令,控制仿生水母的鳍条结构、折纸结构、转向机构等运动,实现仿生水母的上游、下沉、转向等各种运动功能。采用容量高达2 200 mA·h的锂聚合物电池,可实现水母的持久续航。自主设计的电源系统包含多个电压等级,为电气特性相异的器件提供更多选择,且系统设计了过流、过压防护,为水母的稳定安全运行提供了支持。同时设计了电压实时检测电路,以对电路系统的电压进行实时监测。基于硬件抽象层(Hardware Abstraction Layer,HAL)开发一套稳定高效的微控制器软件系统,按照HAL规范实现对芯片接口的配置,兼具代码标准和操作简便的优点,大大提高了开发效率。软件设计中引入了FreeRTOS微控制器实时操作系统,该系统不仅可以实现功能的模块化,即任务之间相互独立,可依据需求建立对应模块,且可对独立的功能模块进行独立测试,极大地提高了工作效率。

图12 电气控制系统框图Fig.12 Block diagram of electrical control system
2.2 趋光控制系统
水母拥有一种原始的视觉器官——眼点,它们分布在伞状体顶部的外缘,可以感知外界环境的光源,根据光源变化发现和避开障碍物。基于此特性,本文在仿生水母的腔体结构上设计趋光控制系统,使其可以感知外界红外光线的变化,并结合机器学习算法对光源位置进行预测并做出反应,即趋光运动。
趋光控制系统以集成感光芯片为核心元件,均匀布置在腔体四周,考虑到感光元件的接收角度限制,每隔60°布置一组感光单元以满足全向感知的要求,采用960 nm的红外波段作为传感光源,设计阵列光源结构以抵抗水下光源的衰减,并且在腔体结构上设计暗室以排除干扰光源的影响,在光源进口处安装红外滤波膜片排除非传感光源的影响。
针对光源位置预测偏差,采用支持向量机、Logistic回归、CART决策树和K–近邻算法模型4种机器学习方法处理传感数据,通过对实验数据和实验结果的处理后得到4种模型的准确率、ACU和学习曲线,对比后最终选择支持向量机模型。
对采集数据进行超参数优化与模型训练,经过训练后的模型位置检测成功率高达90%,在Near-Miss算法生成的欠采样测试数据集上,对于单个扇形区域进行预测时,得到的概率曲线下所对应的面积值高达0.983 6,证明了该算法在光源位置预测中具有较高的准确性。
将光电传感系统的感知功能应用于自身的运动控制,当仿生水母未检测到外界有效光源时,重物块仅采用微调方法以使水母保持竖直平衡,只在竖直方向进行上游和下沉运动;当仿生水母检测到外界红外光源时,机器学习算法模型控制重物块偏向光源以改变水母运动方向,并结合鳍条和折纸结构的驱动实现水母的趋光运动。

图13 趋光运动Fig.13 Schematic diagram of phototaxis motion
3 样机研制与测试
3.1 样机研制
根据设计结果,综合考虑力学性能、材料性质、制作成本等因素选择制造材料,鳍条结构既要满足刚度要求,又要通过变形产生推进力,因此选择TPU 95A材料。而对于折纸结构的折痕变形过程则利用软胶翻模的方法进行制造,非受力杆件采用轻质空心铝合金制造,受力传动杆件则采用刚度更好的不锈钢材料,具体材料选择如表1。

表1 仿生水母制造材料表Table 1 Manufacturing materials

图14 仿生水母实体Fig.14 Bionic jellyfish
选定合适材料后,采用3D打印和翻模注塑制造水母实体,其主要技术参数如表2。
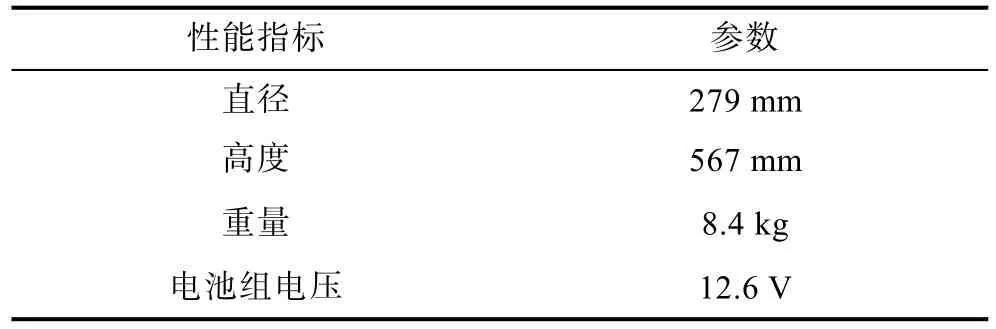
表2 仿生水母主要技术参数Table 2 Main technical parameters of bionic jellyfish
3.2 测试实验
分别对仿生水母的双驱动推进运动和趋光感知功能进行实验,水下实验在半径1 m、深度1.5 m的圆柱形水池中进行。
实验结果表明:仿生水母运行稳定,采用的扑动–喷射双驱动推进模式相比于单一推进模式具有更高的综合推进效率,运行速度相较于采用单摆动推进的驱动方式提升约25%,证明了本文设计的双驱动结构是一种高效的推进方式,仿生水母综合性能如下:
1)仿生水母总重为8.4 kg,浮力为8.35 kg,浮力略小于重力,可在水中自主缓慢下沉;
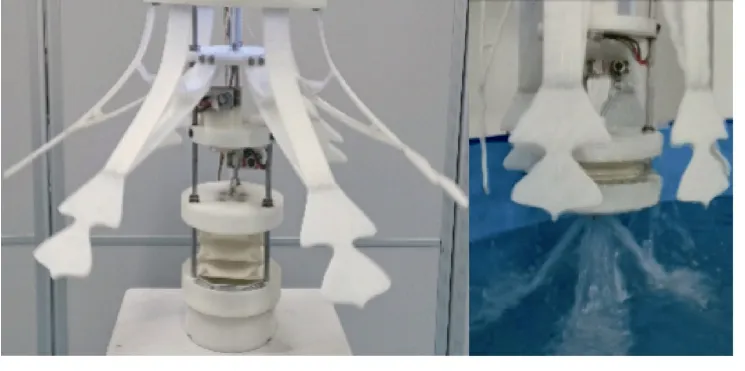
图15 双驱动推进实验Fig.15 Dual drive propulsion experiment

图16 趋光运动实验Fig.16 Phototaxis experiment
2)最大偏转角度为30°,可实现水下环境中的全方位运动以及稳定的反馈调节系统,同时具有较高的灵活性;
3)总推力为0.674 N,相比于单摆动驱动方式增加约36%,最快游动速度达100 mm/s,在水下能够实现快速持续推进;
4)通过均匀布置光电传感器实现了对光源的识别追踪,且在水下能够通过转向结构定向光源,通过驱动结构实现趋光运动,识别距离约为0.3 m,响应时间约为2 s。
4 结束语
本文以水母为仿生对象,提出了一种柔性鳍条扑动与折纸结构喷射的双驱动仿生水母,有效提升了水母推进力和推进效率,仿水母眼点特性。通过优化阵列设计一种趋光控制系统,可自主实现在水下朝向光源运动,通过样机试制与实验验证了提出的双驱动机构及趋光运动的可靠性。随着水下通信技术不断发展,搭载有水下通信系统的仿生水母将在深海探测、资源勘探、洋流能利用等技术领域[12]发挥出重要作用。