汽车起重机移动式跨越架的机构设计及仿真分析
2023-08-29丁登峰甘利红刘胤辰王志斌
刘 敏,丁登峰,甘利红,刘 帆,刘胤辰,张 阳,王志斌
(1.国网湖北省电力有限公司咸宁供电公司,湖北咸宁 437000;2.湖北香城智能机电研究院有限公司,湖北咸宁 437000;3.湖北科技学院自动化学院,湖北咸宁 437100)
0 引言
在送变电行业的架线施工中,跨越是常见的施工工况[1]。跨越架是线路施工过程中用来支撑导、地线,临时通过公路、铁路、电力线以及弱电线路的架子。依据不同分类标准,跨越架的种类繁多,施工方式、跨越物的型式是影响分类的主要因素。常规跨越架采用架体和封顶绝缘网的结合模式。其中,架体的作用是承担导、地线的放线冲击,封顶绝缘网的作用是保护落线。跨越架的搭设、拆除需要投入大量的人力、物力,每次搭设、拆除的成本较高,同时存在安全隐患,容易造成架体坍塌、人员伤亡事故。文献[2]中陈述了跨越架坍塌的原因,包括搭设不规范、极端天气因素、施工现场环境复杂等。
基于常规跨越架存在的问题,开展新型跨越架的设计研究。文献[3]进行了移动式快速跨越架的研制,形成长度18 m、宽度8 m 的防护平面,防护平面距离地面高度为6.5 m,其特点是机动性强、搭设速度快、可折叠的形式、重量轻等。文献[4]进行了移动式可伸缩双向回转输电线跨越架的结构设计,由U 形架、水平回转支承、电动液压推杆、底部固定支架、侧方载人平台等组成,安装在定型的汽车起重机上。文献[5-6]进行了移动展开式跨越架设计,由车体、转台、下液压柱、上液压柱、转轴装置、支撑杆、主杆以及臂架等组成。文献[7]基于雨伞的工作原理进行了车载移动式跨越架的研制,由汽车起重机、跨越架本体以及附件等组成。
综上所述,与常规跨越架相比,文献[3-7]中新型跨越架不需要复杂的搭设、拆除流程,操作简单其中文献[7]中的跨越架工作原理最为简单,实用性强。因此,基于文献[7]中跨越架的工作原理,进行跨越架的机构设计及仿真分析,为新型跨越架的设计提供参考。
1 跨越架设计
汽车起重机是目前应用非常广泛的一种起吊搬运机械,由起升、变幅、回转、起重臂和汽车底盘组成,依靠起重臂的伸缩来搬运物品(图1)。

图1 汽车起重机
移动式跨越架基于汽车起重机载体,机动性强、转移迅速。利用汽车起重机的回转、起升、伸缩功能满足跨越架的位置调整。跨越架的姿态调整需要依靠自身的结构实现,其主体结构采用折叠式。跨越架安装于汽车起重机的主臂末端,有3 个自由度(图2)。其中,自由度01、自由度02 满足跨越架的姿态调整功能,自由度03 满足跨越架的撑开、收缩功能。
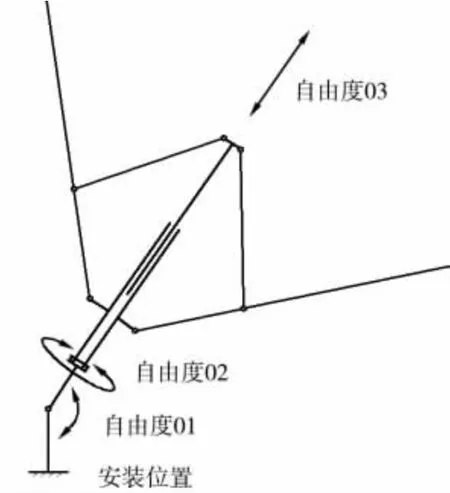
图2 跨越架工作原理
2 跨越架折叠机构设计
基于雨伞的工作原理,跨越架主体结构采用折叠式。首先,引入铰链四杆机构以及机构的演化方法;其次,跨越架折叠机构设计。
2.1 铰链四杆机构及机构的倒置演化
由于机构各部分的运动是由原动件的运动规律、机构中运动副的类型及机构的运动尺寸共同来决定,与构件外形、断面尺寸、组成构件的零件数量及固定方式等因素无关。因此,根据机构的运动尺寸,按一定的比例尺寸确定运动副的位置,通过运动副、常用机构运动简图的代表符号及一般构件的表示方法将机构的运动传递情况表示出来。
铰链四杆机构是平面四杆机构的基本形式,铰链四杆机构包括3 种形式,分别为曲柄摇杆机构、双曲柄机构及双摇杆机构(图3)。其他形式的四杆机构是其演化形式,如曲柄滑块机构等。
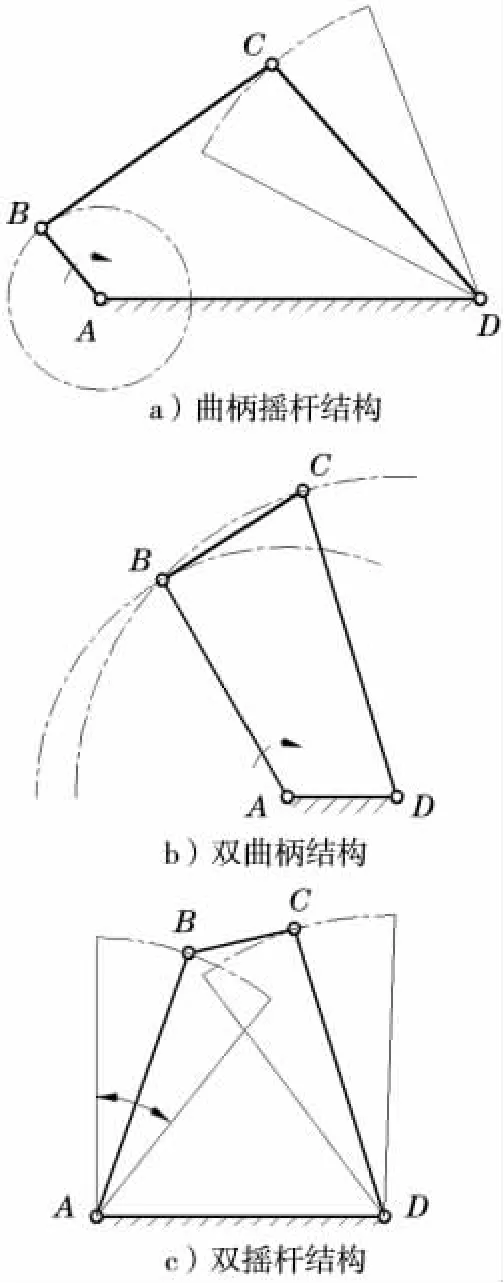
图3 铰链四杆机构的形式
运动链选用不同的构件作为机架,可以演化出不同形式的机构,这种演化方法没有改变运动链的尺寸和构件之间的相对运动关系,这种演化方法称为机构的倒置(图4)[8]。
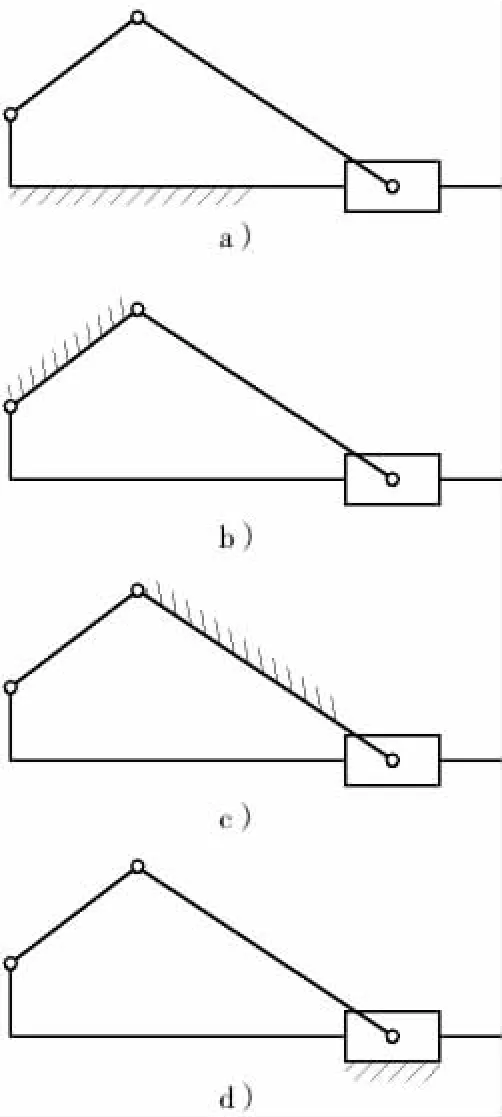
图4 曲柄滑块机构的倒置
2.2 折叠机构设计
跨越架折叠机构属于滑块摇杆机构,由铰链四杆机构、机构倒置演化而来。其中,滑块是原动件,在行程范围内移动,实现折叠功能。在机构中,常用传动角大小及变化情况来评价机构传力性能。传动角越大,对力的传递越有利。为了保证机构性能良好,应使最小传动角不小于40°~50°,对于受力小或不经常使用的操纵机构,允许传动角小一些,不能发生自锁。设计要求滑块的行程为1000 mm,摇杆角度变化范围为0°~90°,不能发生自锁,即传动角要求大于0°。
机构的设计方法通常包括图解法、解析法。
图解法是利用铰链之间相对运动的几何关系,通过作图确定各铰链的位置,从而定出各杆的长度。图解法的特点是直观、简单、快捷,对于要求机构满足的位置不多于3 个时设计十分方便,设计精度也能满足工作要求,能为解析精确求解和优化设计提供初始值。
解析法是建立包含机构各尺度参数、运动变量在内的解析式,根据已知的运动变量求机构的尺度参数。解析法的特点是借助计算机求解,计算精度高,适应于对3 个或3 个以上位置设计的求解,对机构进行优化设计和精度分析十分有利。
综合考虑上述机构设计方法及特点,本文跨越架折叠机构的设计采用图解法,满足上述设计要求。滑块摇杆机构的运动简图如图5 所示,图中位置ABCD 为打开状态、位置AB′C′D′为折叠状态。
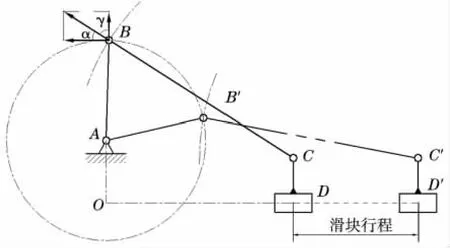
图5 滑块摇杆机构
滑块摇杆机构的参数见表1,距离OA、距离OD、行程DD′及杆长CD 是根据实际情况确定的初始参数;杆长AB、杆长BC 是利用图解法得出的设计结果。
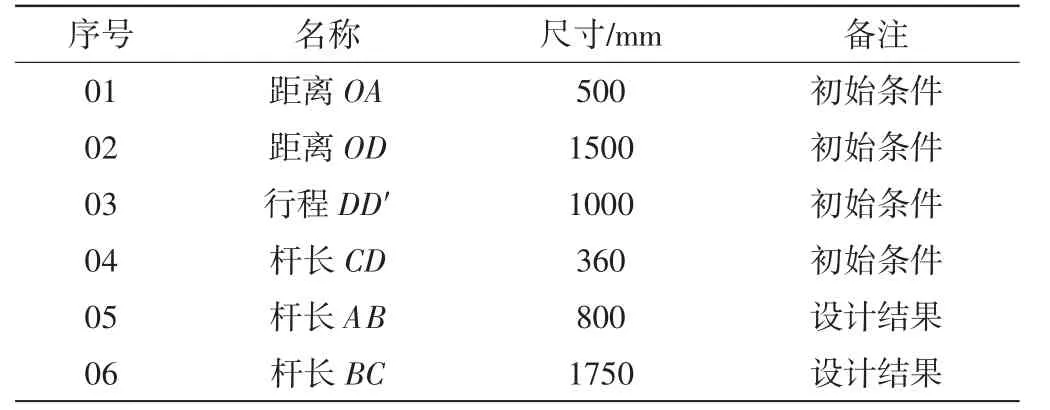
表1 滑块摇杆机构参数
3 机构分析
本文利用ADAMS 软件进行机构分析,验证滑块摇杆机构设计结果的合理性,是否满足设计要求。滑块的初始位置为1500 mm,行程为1000 mm,速度为100 mm/s,仿真时间为10 s(图6)。
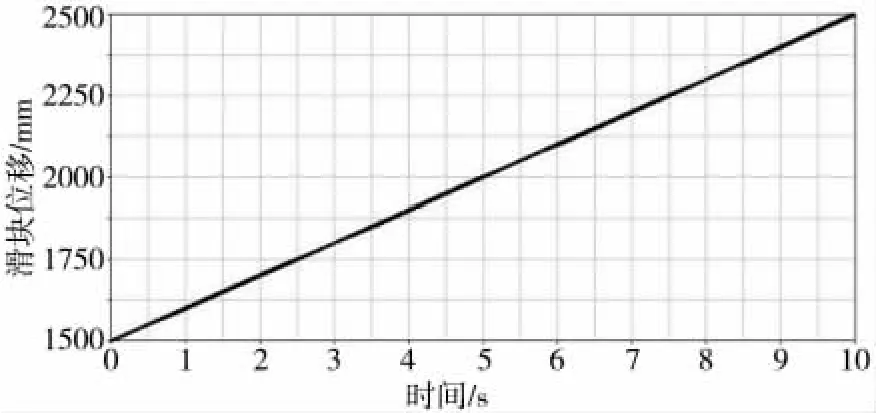
图6 滑块位移曲线
摇杆的转角曲线仿真结果如图7 所示,在0 s 时摇杆转角为88.28°,为最大值;在10 s 时摇杆转角为13.04°,为最小值。因此,摇杆的转角变化在0°~90°范围内,满足设计要求。
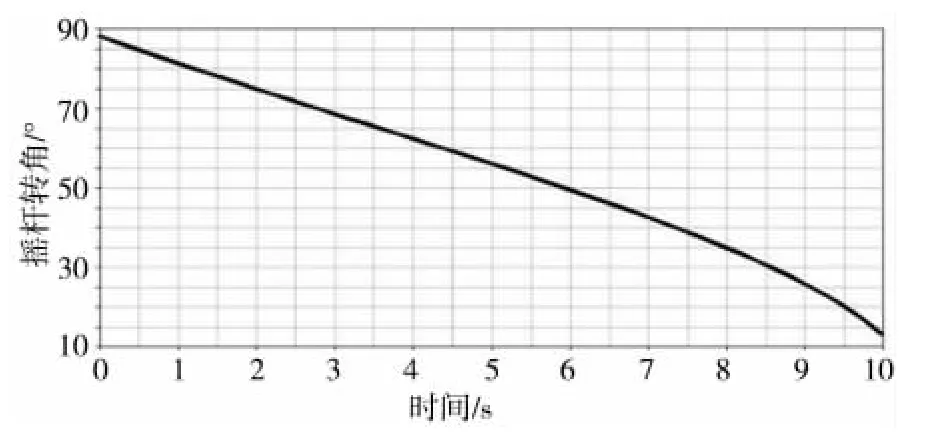
图7 摇杆转角曲线
滑块摇杆机构的传动角曲线仿真结果如图8 所示,在0 s时摇杆转角为59.23°,为最大值;在10 s 时摇杆转角为36.97°,为最小值。因此,滑块摇杆机构的传动角始终大于0°,不会发生自锁,满足设计要求。
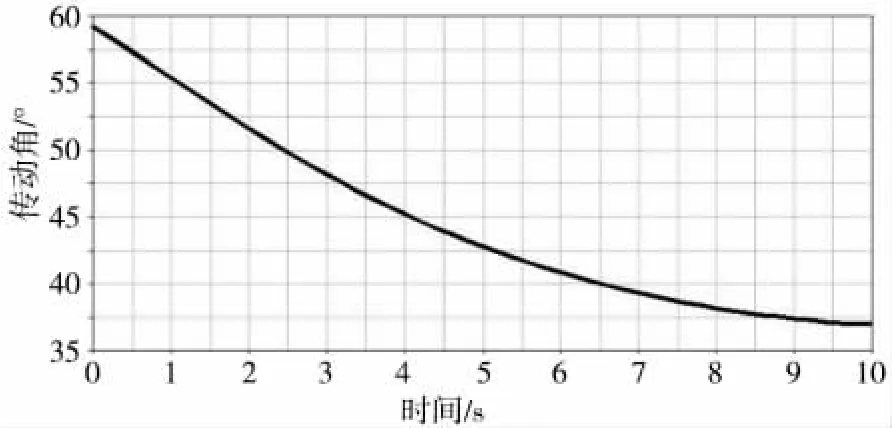
图8 滑块摇杆机构传动角曲线
4 结论
基于汽车起重机,本文提出了一种三自由度的移动式跨越架,主体结构采用折叠式、滑块摇杆机构,采用图解法进行机构的设计;利用ADAMS 软件进行机构分析,验证机构设计的合理性,满足设计要求。
