基于无人机影像的崩塌信息提取
2023-08-28陈建国钟连祥
陈建国 钟连祥
基于无人机影像的崩塌信息提取
陈建国 钟连祥
(江西省地质局工程地质大队,江西 南昌 330029)
以开阳县西部金中镇某崩塌为例,采用无人机倾斜摄影技术,获取了崩塌表面丰富的光谱与纹理信息,然后结合运动恢复结构算法(SFM)实现了高精度的DEM、DOM,运用面向对象与SVM算法相结合的分类方法实现了对研究区内崩塌区域的信息提取。研究表明,崩塌的识别总体精度为93%,Kappa系数为0.796 7,崩塌的总面积为5 362 m2,识别准确度较高,表明无人机遥感在崩塌信息提取与分析领域具有较高的精度和应用价值。
无人机遥感;面向对象分类;崩塌信息提取;SVM算法
引言
崩塌被认为是世界范围内严重的自然灾害之一,给人民的生命财产安全造成了严重的威胁[1]。现有的崩塌灾害调查与制图技术,例如光学遥感、机载三维激光扫描、地面三维激光扫描、星载雷达等,都存在不足之外,如价格昂贵、不够灵活方便等。对于崩塌微小的变形或者裂隙结构等特征,卫星影像获取的DOM难以识别[2]。
在过去的几年中,民用的廉价无人机(UAV)以及基于图像的计算技术的发展,基于无人机的摄影测量技术得到了广泛的应用,该技术已经成为传统航空摄影测量的有利补充,被广泛应用在包括地质灾害调查、河岸侵蚀、植被监测等领域[3,4]。但无人机遥感获取高分辨率的DEM和DOM在崩塌信息提取方面的研究较欠缺。
阳县金钟镇位于黔中腹地,黔中经济区,其地表破碎、崩塌等地质灾害发生频率居高不下,且严重威胁到当地人民的生命财产安全[5,6]。开展相应的崩塌灾害研究具有紧迫性和必要性。
因此,这项研究的主要目的是评估无人机系统在复杂地形条件下崩塌测绘的适用性,并建立基于无人机倾斜摄影的崩塌自动制图与精细化分析的完整方法。采用无人机倾斜摄影技术,获取了崩塌表面丰富的光谱与纹理信息;然后结合运动恢复结构算法(SFM)获取高精度的DEM、DOM和三维实景模型;选用VDVI和坡度作为参数,运用SVM面向对象分类方法以获取崩塌信息提取;最后,对此方法进行精度验证。该新技术值得在云贵高原地区进行推广和应用。
1 研究区概况
研究区位于贵州省开阳县西部金中镇,地理坐标为东经106°50′26″,北纬27°05′42″,距贵阳市88 km。研究区地属亚热带温和湿润气候区,降雨丰沛且集中在夏季和秋季。该区内最主要的河流是洋水河,为乌江水系二级支流。区内出露地层岩性主要是震旦系下统南沱组(Pt32cn)粉砂质页岩、变余粉砂岩;上统灯影组(Pt33bЄldy)中厚至厚层白云岩等。
2 无人机遥感系统
无人机摄影测量是以快速、低成本地获取目标物为目的,以无人机为飞行平台,搭载高分辨率数码相机传感器的对研究区进行多角度拍摄的一种测量技术。小型无人机遥感系统满足体积小、成本低、操作简便、实时性强等特点,能高效获取高精度、高分辨率的影像,在中小型地质灾害应急调查中能发挥其独特的优势。无人机遥感系统总体上可以分为三部分:一是飞行系统,由无人机及其搭载的遥感设备组成,控制着飞行和航拍;二是地面控制系统,主要由无人机控制器和高精度实时动态差分辅助设备(RTK)组成;三是航摄系统,主要包括控制调节方向的相机云台和摄像头[7]。
3 基于无人机影像的崩塌提取步骤
3.1 影像预处理
崩塌信息提取主要分为5个步骤:影像预处理、影像多尺度分割、特征信息提取、特征规则集构建和崩塌提取分析[8]。
3.1.1影像数据获取
无人机获取影像数据的第一步是现场踏勘,进行飞行区域的环境评估,评估内容包括无人机起飞及飞行空间是否安全,以确定调查方案。接着进行设备组装,包括电池、摄像头、机翼组装和控制器连接等,组装完成后需要进行检查飞行工作情况等。然后,根据研究区实际地形地物情况进行控制测量,布设控制点及航线规划。最后,设定好参数即可起飞航摄,参数设定包括无人机飞行高度和拍照重叠率等。
3.1.2图像处理
利用运动恢复结构SfM对图像进行处理。SfM的特点是无需重构场景,可高效地从重叠影像中通过迭代光束平差过程自动提取目标物数字三维模型及快速求解成像照相机的运动参数等。此过程需要利用控制点对生成的3D密集点云进行空间系统校正。
3.1.3面向对象影像处理方法
随着空间信息技术的发展及地观测任务逐渐精细化,高分辨率遥感卫星影像技术被广泛使用,面向对象的影像分析技术应运而生。对于无人机遥感获取的具有较高分辨率的影像,传统的基于像元的分类方法会造成空间数据冗余,而面向对象分类方法可以避免“椒盐效应”,且能从不同尺度提取地物信息,以获取较高的精度[9]。面向对象分类方法对于少波段的高分辨率遥感影像有着巨大的潜力。面向对象的影像分析中最核心步骤为图像分割。
3.2 多尺度分割与参数的选择
在进行面向对象分类的第一步是对研究区进行影像分割,这一步至关重要,分割结果的好坏不仅影响特征物提取,还直接影响分类的精度[10]。多尺度分割是在影像分割时最重要的分割方法之一。本文利用多尺度迭代分割方法以确定最优分割参数,分割参数见表1。
表1 影像分割参数
分割尺度形状因子紧实度波段权重 1500.50.51∶1∶1∶1
3.3 特征信息提取
经前人的研究[10],可见光波段计算的植被指数VDVI,在无人机影像中有较好的提取效果。本研究区植被覆盖率较高,较方便进行提取,故首先进行植被提取。设置阈值小于-0.018判断为非植被;大于0.002判断为植被,并为上述值区间选用隶属度函数,即原始影像是依据隶属函数值来确定植被与非植被类别。VDVI计算公式为:
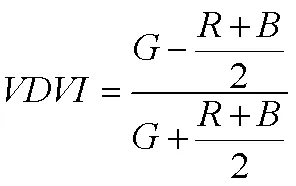
式(1)中:为绿光波段;为红光波段;为蓝光波段。
3.4 坡度小于5°区域提取
为更好地提取崩塌信息,往往需要更多的辅助特征,例如地形、形状、纹理及邻域特征等[11]。众多研究表明,崩塌多发生于坡度较陡区域,对于坡度小于5°的区域则不易发生崩塌[12]。因此利用无人机生成的高精度DEM数据获取研究区的坡度信息,通过规则分类的方法,在非植被区中提取了坡度小于5°的区域。
3.5 崩塌提取分析
本文根据遥感影像中的对象特征,利用隶属度函数结合规则分类,剔除非崩塌地物,在此基础上运用SVM监督分类方法实现了崩塌信息的提取。
对于崩塌信息分类提取,设置阈值的方式不再适用。本文以确保样本点对应地物信息的丰富度和覆盖度为原则,人工选取样本点,并结合支持向量机(SVM)以完成分类、提取崩塌信息。SVM通过监督学习的方法进行线性、非线性分类等任务,其目标是寻找适当的函数子集及该子集中的判别函数,容忍更多的噪声或是降低噪声影响。通过在高维空间内构建超平面,使两类数据点正确分开并距离分类面最远,其判别函数如下[13]:

式中,()为回归函数,()为核函数,为权重向量,为偏置项。不同核函数构成的SVM有所不同,本文选用径向基核函数(RBF),即

惩罚系数设为2,在待分类影像区域选择20个崩塌区域的样本点和20个非崩塌区域的样本点,选定方差、对比度与坡度作为分类参考特征,进行模型训练,分割后结合点样本训练集对崩塌进行提取。崩塌的总面积为5 362 m2。
4 崩塌特征分析
4.1 崩塌几何特征分析
由于利用控制点将整个结果转换到大地测量坐标系中,无人机影像生成的三维模型不仅是立体直观的,而且是可测量的。在匹配数据空间后加入控制点生成密集点云时,可挖掘更深层次的数据,可以进行深度信息挖掘,为地质灾害的定量研究提供了有用信息,对地质灾害的监测分析具有重要的意义[8]。本文在崩塌制图的基础上结合三维模型和DEM提供的三维信息,获取了崩塌的几何结构特征(见表2、图1)。
表2崩塌几何特征统计 单位:m
崩塌源区(A)堆积区(B1)堆积区(B2) 长宽高厚度长宽高厚度长宽高厚度 702863101003570311538853.5
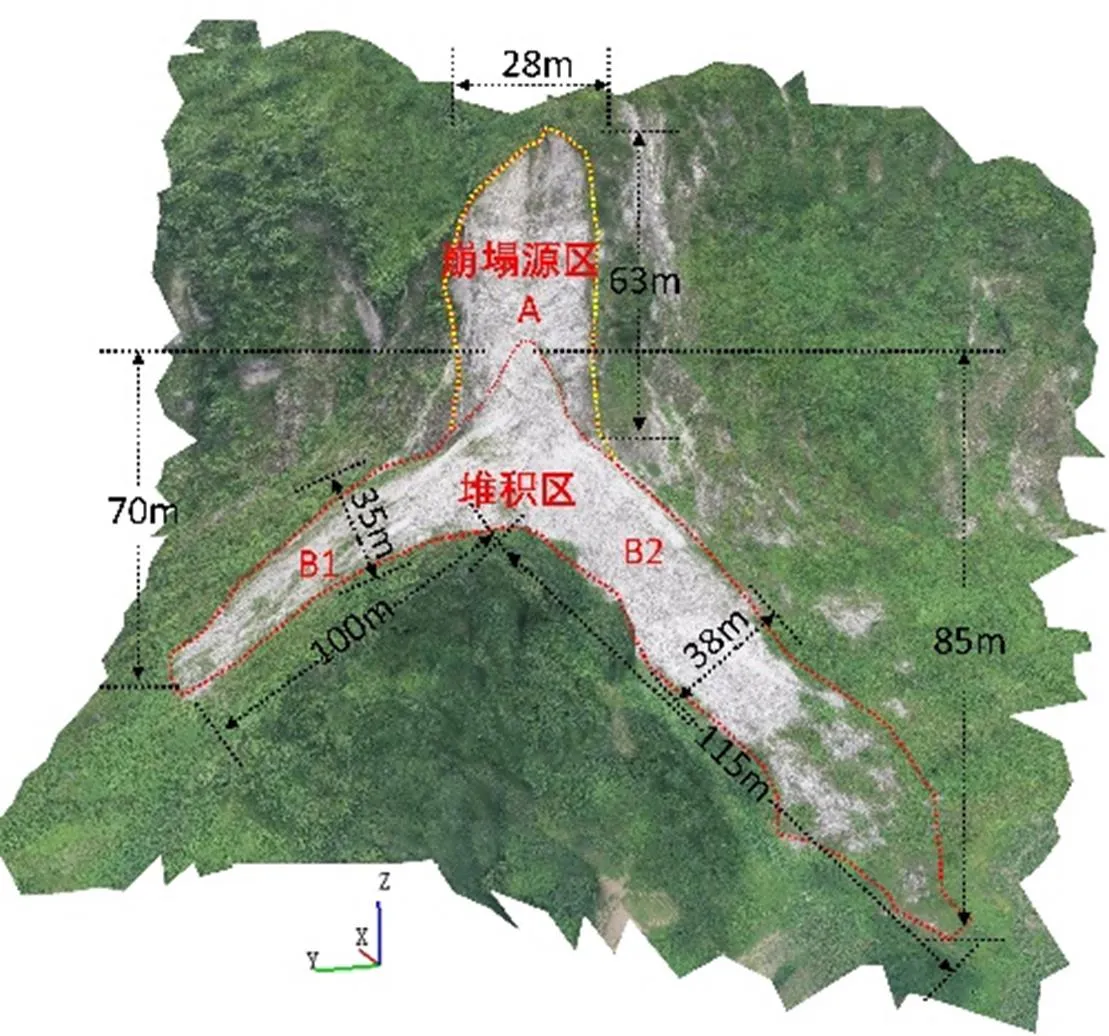
图1 崩塌几何结构特征
崩塌源区平均高约63 m,宽约28 m,平均厚度约10 m。崩塌体失稳崩落后,在坡角由于地形的阻挡作用使崩塌体向两侧滚落堆积,在形态上形成一个分叉。左侧堆积区(B1)平均长约100 m,宽约35 m,高约70 m,平均厚度约3 m。右侧堆积区(B2)平均长约115 m,宽约38 m,高约85 m,平均厚度约3.5 m。
4.2 崩塌地形特征分析
本文利用无人机生成的DEM数据计算该崩塌的坡度、高程及坡向频率分布。通过分析该崩塌的高程图和高程频率分布曲线,可以识别出:整个崩塌体分布在1 086~1 208 m高程范围内,相对高差为122 m。崩塌源区分布在1 145~1 208 m,相对高差为63 m。根据坡度频率分布图可以区分出崩塌源区和堆积区部分,崩塌源区的坡度虽然很大(在55°~85°之间),但是频率较小。堆积区的坡度主要分布在20°~40°之间,频率比崩塌源区大5倍。崩塌的坡向频率分布表明崩塌内部坡向分布,主要集中在北、西北、西、西南方向。
5 精度定量评估
提取精度验证是为判断提取遥感图像信息方法和结果的优劣,对提取结果进行分析有助于修正提取模型[14]。为定量化描述崩塌识别的精度,利用相同无人机影像对崩塌进行人工目视判读,获取研究区崩塌分布,通过随机获取了100个崩塌数据验证点,100个非崩塌数据验证点。通过将验证点与提取结果进行叠加分析进行识别准确性验证。如表3所示,经过统计计算可得,本文采用的崩塌信息提取方法,识别总体精度(OA)为93%,Kappa系数为0.796 7,精度可靠。
表3精度验证混淆矩阵
参数本文方法结果 崩塌/处非崩塌/处 崩塌样本点14912 非崩塌样本点237 总体精度93% Kappa系数0.796 7
6 结束语
本文提出了一种基于面向对象和无人机遥感高分辨率影像崩塌信息半自动提取的方法。与其他数据采集系统(地面、基于飞机或基于卫星的)相比,UAV在时间、成本和高空间分辨率方面具有优势,可以在突然的崩塌事件后快速收集数据。与人工目视解译结果相比较,基于面向对象的崩塌自动识别方法提取精度可达93%,Kappa系数为0.796 7,识别准确度较高。
崩塌的总面积为5 362 m2,崩塌源区平均高约63 m,宽约28 m,平均厚度约10 m。整个崩塌体分布在1 086~1 208 m高程范围内。崩塌源区的坡度在55°~85°之间,堆积区分布在20°~40°之间,崩塌内部的坡向主要集中在北、西北、西和西南方位。
本文利用面向对象和无人机遥感高分辨率影像崩塌信息半自动提取的方法,在开阳县西部金中镇牛干冲崩塌信息提取中得到较好的应用,为地质灾害调查、风险评估及应急抢险等工作提供技术参考,以提高工作效率和减少经济损失。
[1]刘传正. 中国崩塌滑坡泥石流灾害成因类型[J]. 地质评,2014,60(4): 858-868.
[2]李培锋,王晖,吴雨辰,等. 基于无人机影像的危岩体识别及公路地震风险研究[J]. 地震工程学报,2022,44(4): 777-785.
[3]陈秋明,黄发明,宋鹏. 无人机及三维激光扫描仪技术在沙滩剖面动态监测中的应用及测量精度分析[J]. 应用海洋学学报,2021,40(3): 529-539.
[4]覃乙根,杨根兰,谢金,等. 贵州省开阳县斜坡地质灾害孕灾因子敏感性分析[J]. 煤田地质与勘探,2020,48(4): 190-198.
[5]覃乙根,杨根兰,江兴元,等. 基于确定性系数模型与逻辑回归模型耦合的地质灾害易发性评价: 以贵州省开阳县为例[J]. 科学技术与工程,2020,20(1): 96-103.
[6]邵林,李军. 贵州矿山地质灾害类型及其基本特征[J]. 中国地质灾害与防治学报,2011,22(3): 56-60.
[7]谢金,杨根兰,覃乙根,等. 基于无人机与Rockfall的危岩体结构特征识别与运动规律模拟[J]. 河南理工大学学报(自然科学版),2021,40(1): 55-64.
[8]黄海峰,林海玉,吕奕铭,等. 基于小型无人机遥感的单体地质灾害应急调查方法与实践[J]. 工程地质学报,2017,25(2): 447-454.
[9]李强,张景发,罗毅,等. 2017年“8.8”九寨沟地震滑坡自动识别与空间分布特征[J]. 遥感学报,2019,23(4): 785-795.
[10]杨云辉,赵鲁全,李新举,等. 利用无人机和面向对象技术快速提取田坎面积[J]. 测绘地理信息,2022,47(2): 96-100.
[11]陈天博,胡卓玮,魏铼,等. 无人机遥感数据处理与滑坡信息提取[J]. 地球信息科学学报,2017,19(5): 692-701.
[12]张群,赵超英. 基于面向对象的高分遥感数据甘肃黑方台黄土滑坡半自动识别[J]. 灾害学,2017,32(3): 210-215.
[13]娄佩卿,陈晓雨,王疏桐,等. 基于无人机影像的喀斯特农耕区地物识别: 以桂林市为例[J]. 国土资源遥感,2020,32(1): 216-223.
[14]刁淑娟,刘春玲,张涛,等. 基于SVM的湖泊咸度等级遥感信息提取方法: 以内蒙古巴丹吉林沙漠为例[J]. 国土资源遥感,2016,28(4): 114-118.
Collapse Information Extraction Based on UAV Images
Taking a collapse in Jinzhong town in the west of Kaiyang county as an example, the UAV oblique photography technology is used to obtain abundant spectral and texture information of the collapse surface. Then combined with motion recovery structure algorithm (SFM), DEM and DOM are realized with high precision. The classification method combining object - oriented algorithm and SVM algorithm is used to extract the information of collapse area in the research area. The research shows that the overall accuracy of the collapse identification is 93%, the Kappa coefficient is 0.796 7, and the total area of the collapse is 5 362 m2. The recognition accuracy is high, which indicates that the UAV remote sensing has high precision and application value in the field of collapse information extraction and analysis.
UAV remote sensing; object-oriented classification; extraction of collapse information; SVM algorithm
TP7
A
1008-1151(2023)07-0006-03
2022-11-01
陈建国(1976-),男,江西崇仁人,江西省地质局工程地质大队高级工程师,从事岩土工程研究工作。