低轨空间碎片捕获离轨方案设计与分析*
2023-08-28赵真王洪宇王碧罗超庞兆君梁振华
赵真,王洪宇,王碧,罗超,庞兆君,梁振华
(1.上海宇航系统工程研究所,上海 201109;2.南京理工大学,南京 210094)
1 引言
世界各国历次发射产生的废弃火箭末子级、失效卫星、退役卫星等形成了数量庞大的米级空间碎片[1,2]。空间碎片威胁在轨航天器安全,侵占轨道资源,如不采取任何主动清除措施,卫星和空间碎片相互碰撞产生链式反应,将导致碎片数量呈现指数增长(称为“凯斯勒效应”),影响空间轨道可持续使用[3-5]。
国内外经过十余年的攻关,在空间碎片监测预警、减缓防护、清除离轨等方面开展持续研究[6]。
在空间碎片主动清除技术(Active Debris Removal,ADR)方面,2018年欧洲“空间碎片移除任务卫星”(Remove DEBRIS)开展了飞网抓捕、飞矛穿刺试验。2021年,日本“空间碎片清理卫星”(ELSA-d)开展小型目标自主抵近和电磁捕获试验。在空间碎片离轨技术方面,2010年起美国、日本等国已实施了多次电动力绳离轨试验,虽然均为部分成功,但已突破了导电系绳释放、电荷回收和绳系组合体变轨等关键技术。此外,2012年起,美国、欧洲相继成功开展了1 m2至32 m2多个增阻帆在轨试验。除关键技术演示验证外,面向在轨存量的大型碎片清除,瑞士计划2026年开展首次清洁任务,“清洁太空一号卫星”(ClearSpace-1)采用四指飞爪捕获火箭末子级残骸,再入大气。
随着进入太空的技术门槛降低,民用航天蓬勃发展,巨型星座建设如火如荼。针对未来在轨巨型星座寿命末期集中离轨需求,2021年“一网”星座委托日本宇宙尺度公司研制“ELSA-M服务”卫星,计划2026年起开始实施星座中退役卫星的清除业务。2022年2月,美国太空探索技术公司(SpaceX)也提出星链星座组网卫星离轨方案《SpaceX在空间可持续发展和安全的举措》。为全面推动空间碎片清除的商业化服务,2022年12月,美国参议院通过《轨道可持续法案》(Orbital Sustainability Act),支持以有偿服务形式开展可持续的空间碎片清除业务[7]。
近年来,国内空间碎片清除技术从无到有得到全面发展。在空间碎片主动捕获技术方面,“遨龙一号”于2016年在轨使用机械臂完成对小型目标的抓捕试验[8]。在被动离轨技术方面,2019年起“金牛座”、“潇湘一号”03星、“北理工一号”分别开展增阻帆、增阻球离轨技术验证。2022年起,已有多套25 m2增阻帆作为运载火箭载荷舱离轨标配组件在轨成功应用,增阻帆低轨离轨技术趋于成熟[9]。
当前,低轨空间碎片主动清除逐步从预先研究转向在轨演示验证和工程应用,但国内外在研空间碎片捕获离轨方案,普遍存在系统复杂、费效比高的问题,缺乏针对米级空间碎片的经济型清除手段[10]。面对数以万计的废弃火箭末子级、失效卫星等米级空间碎片存量,研究低成本、集成化、通用化的空间碎片捕获离轨技术是发展方向之一[11]。
飞网被普遍认为具有捕获容差大、对目标适应能力强、可在距离目标几十米外的安全距离上实施捕获等优点,而增阻帆在低轨具有较好的经济性、安全性,且技术成熟度高。国内外目前设计的飞网,通常从操控星平台发射起就开始展开,直到对目标实施缠绕捕获。需要操控星主动接近空间碎片至50 m以内发射飞网实施捕获,捕获后快速撤离对空间碎片开展拖曳离轨操控,因此主动碎片清除(ADR)实施对操控星存在较大安全风险。本文提出的捕获离轨一体化方案是将飞网和增阻帆集成设计,飞网采用增程技术,具备在距离空间碎片100~200 m 实施捕获的能力,且“发射后不管”,捕获离轨一体化。
2 捕获离轨方案设计
2.1 方案设计目标
针对低轨米级空间碎片清除任务需求,围绕飞网捕获和增阻帆离轨开展低成本、通用化捕获离轨方案论证,提出捕获离轨一体化载荷方案,开展空间碎片清除任务设计与效能分析,论证方案可行性。
2.2 任务流程设计
(1)操控星对目标碎片进行有限绕飞/伴飞,识别自旋轴和动量矩轴。操控星沿空间碎片动量矩轴逼近悬停指向空间碎片,发射增程飞网,如图1所示。

图1 发射增程飞网Fig. 1 Launching the extended-range flying net
(2)从发射的增程飞网中延时发射飞网,完成对空间碎片的捕获,形成“空间碎片+操控星”绳系组合体,如图2所示。
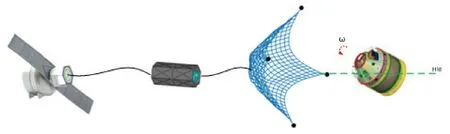
图2 飞网展开形成绳系组合体Fig. 2 The unfolding process of the flying net
(3)操控星通过绳系组合体控制,抑制空间碎片章动,为分离增阻帆建立条件,如图3所示。
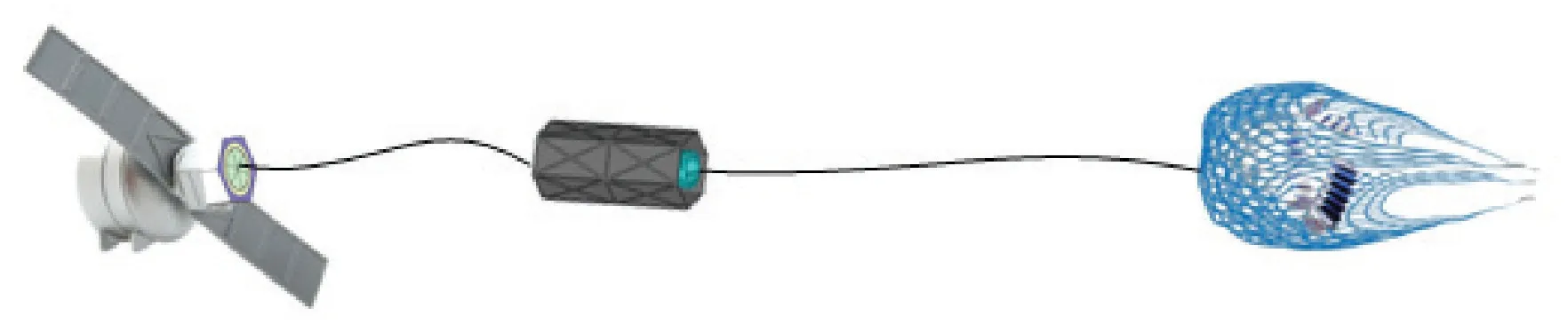
图3 绳系组合体控制Fig. 3 Control of tethered satellite system
(4)释放增阻帆,操控星在轨道面内完成绳系组合体稳定和减速(空间碎片+增阻帆+操控星),如图4所示。
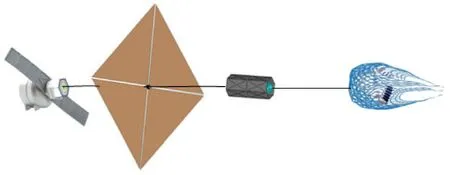
图4 释放增阻帆Fig. 4 Releasing the increased drag sail
(5)操控星切断系绳,分离增阻帆和空间碎片,如图5所示。
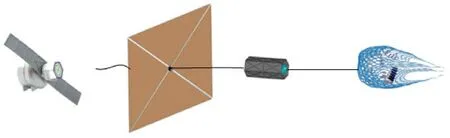
图5 分离绳系组合体Fig. 5 Releasing the tethered satellite system
2.3 捕获离轨载荷方案
为实现在100~200 m的安全距离上捕获米级空间碎片,设计增程飞网,通过二级发射实现小后坐力、小型化、远距离捕获目标能力。同时,将增程飞网与增阻帆集成设计,形成模块化载荷装置,实现碎片捕获和离轨一体化。捕获离轨载荷如图6所示。
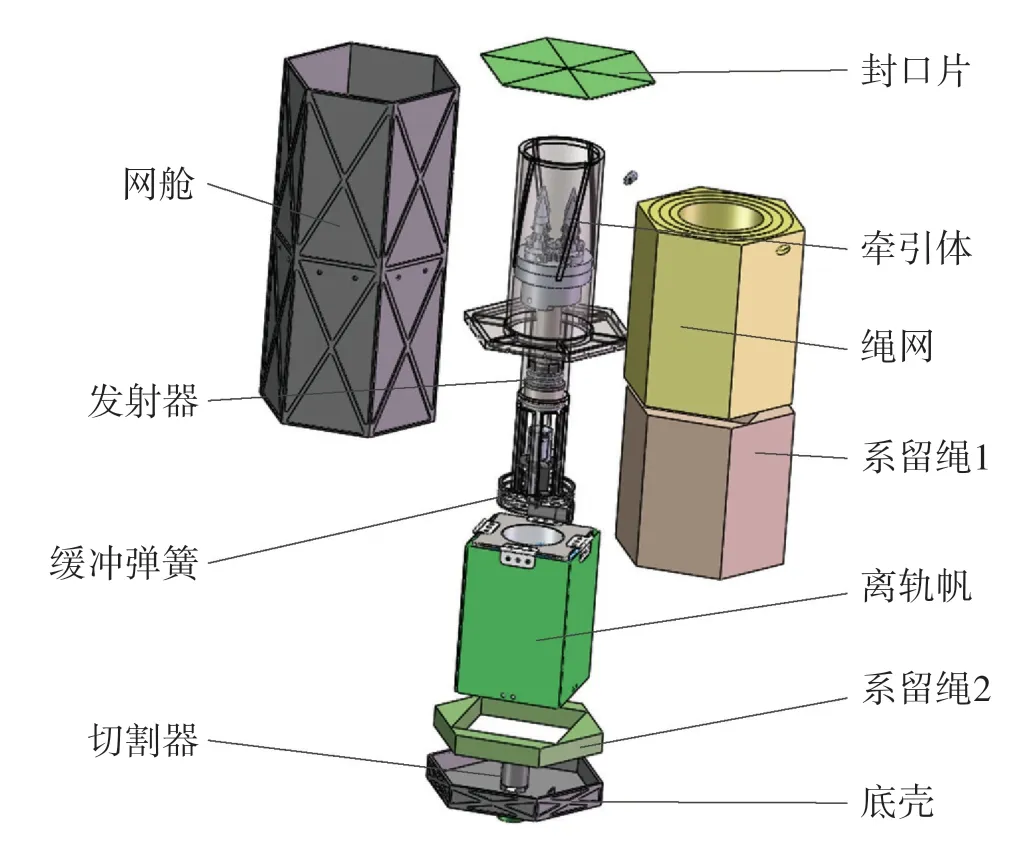
图6 捕获离轨载荷Fig. 6 The capturing de-orbit devices
捕获离轨载荷工作时先发射二级组件,通过延时起爆,在飞行过程中发射16 m×16 m飞网捕获空间碎片。捕获完成后,建立“操控星+空间碎片”的绳系组合体,并通过操控星平台机动抑制空间碎片章动。待绳系组合稳定后,从操控星上分离展开增阻帆,通过切割器释放“增阻帆+空间碎片”。空间碎片在增阻帆的作用下,逐步加速离轨[12]。
捕获离轨载荷工作剖面如图7所示:
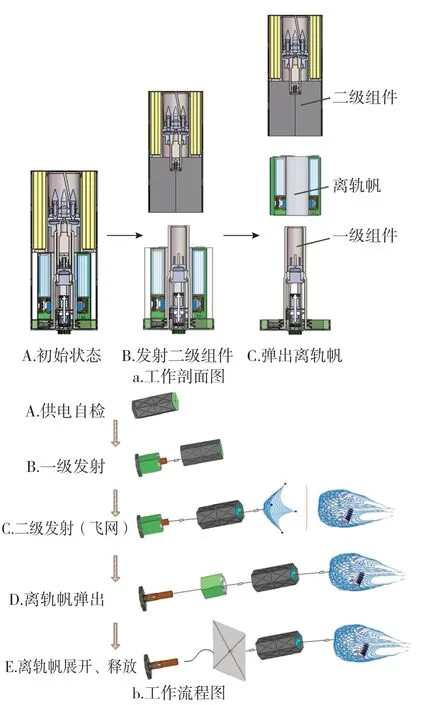
图7 捕获离轨载荷工作剖面图Fig. 7 The workflow of capturing de-orbit devices
(A)操控星悬停指向目标,载荷自检;
(B)载荷一级发射,二级组件飞向目标;
(C)二级组件飞行一定距离后(80~90 m)二级组件发射飞网,飞网捕获空间碎片;
(D)操控星抑制空间碎片章动,弹出增阻帆;
(E)增阻帆展开,切断系绳,绳系组合体离轨。
3 捕获离轨效能分析
3.1 飞网发射误差分析
飞网采用展开包覆方式捕获空间碎片,为表征飞网对空间碎片的包覆效果,通过飞网对目标的覆盖投影面积与目标尺寸的比值作为捕获能力评估的指标,如图8所示。

图8 飞网覆盖目标区域示意图Fig. 8 Schematic diagram of flying net coverage target
针对典型空间碎片(某火箭末子级Φ2900 mm×4500 mm)清除任务,以操控星指向精度、发射偏差、火工品延时误差为设计输入,开展系统指标链分析和飞网展开动力学仿真,迭代确定飞网发射速度、膛线缠角、飞网尺寸等设计参数对飞网捕获能力的影响。
分析飞网捕获空间碎片任务剖面,捕获过程精度链误差包括:操控星指向误差、一级发射偏差、火工品延时误差、二级发射偏差等。
(1)操控星指向误差:取决于操控星相对空间碎片的指向控制精度,增程飞网发射(90~200 m)时指向误差不大于0.5°;
(2)一级发射偏差:包括同轴度和膛线加工精度,发射器同轴度为0.01°~0.03°之间,发射器膛线加工精度0.03°~0.05°之间;由火工品作用误差、发射后坐力、发射不同步等引起的误差,一级发射速度误差取为30±2 m/s;一级发射偏角误差取0.2°;
(3)火工品延时误差:根据延期药点火作用时间推算点火时间误差为标称值±250 ms;
(4)二级发射偏差:包括二级膛线加工误差0.02°~0.05°、二级发射不同步误差0.02°~0.07°。
假设增程发射器的捕获范围是90~200 m,二级发射位置在80 m,在各类固有误差和偏差的影响下,分析飞网设计关键参数。取X1为一级发射作用距离,X2为二级发射作用距离,如图9所示。
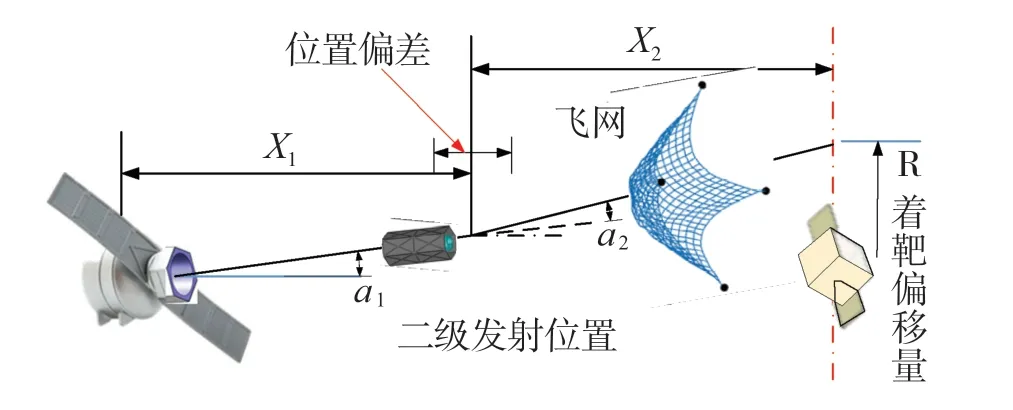
图9 飞网发射误差链示意图Fig. 9 Extended-range flying net launch error chain
图9 中,a1代表一级发射时的各误差项累计误差偏角为0.78°,包括机械加工同轴度误差0.03°,膛线加工误差0.05°,发射偏角误差0.2°和平台指向误差0.5°。
a2代表在一级偏差的基础上二级发射中的误差项累计引起的误差偏角0.12°。二级发射时,飞网从二级发射器中分离的累计误差如图10所示。
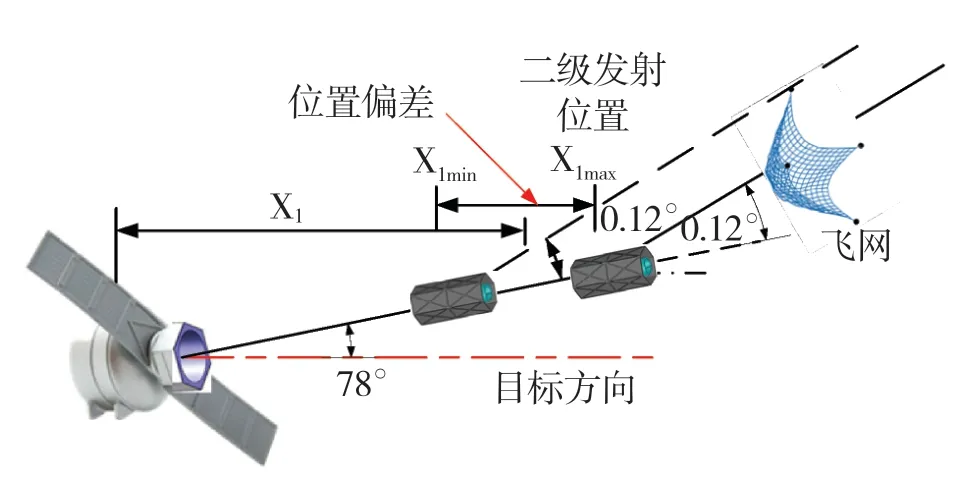
图10 二级发射误差示意图Fig. 10 Schematic diagram of secondary launch error
二级发射的位置误差根据延期药的延期误差±0.25 s,对应飞行距离误差约为±7.5 m。不失一般,一级作用距离X1,偏差记为ΔX,经过二级发射飞网横向累计偏差R记为:
不同目标位置对应的偏差如表1所示,在200 m处的飞网捕获横向偏差约为2.98 m,远小于飞网半径8 m,可以实现飞网缠绕捕获。
表1 在不同距离的飞网横向偏差Table 1 Lateral offset of flying nets at different distances
3.2 飞网捕获概率分析
增程飞网通过平台进行一级发射,发射飞行一定距离后再进行二级发射。飞网飞行展开动态构型可在参数设计基础上,通过飞网展开动力学仿真模拟,并结合不同位置的飞网横向偏差来计算飞网对目标的包覆概率[13]。
飞网的动力学仿真输入如表2所示。

表2 增程飞网仿真分析输入Table 2 Extended-range flying net simulation analysis input
从飞网80 m处二级发射起,不同飞行距离的飞网展开率如图11所示。
图11 不同飞行距离的飞网展开率Fig. 11 Spreading area rate of the flying net at different distances
飞网发射后在90~130 m 内展开率尚不足50%,此时网面呈簇状,飞网依靠矛形牵引体嵌入空间碎片,之后缠绕包覆。130 m后网面展开面积增大,飞网以包覆的形式捕获空间碎片,最佳捕获距离为150~200 m,见表3。

表3 增程飞网不同距离捕获目标能力统计Table 3 Statistics on the ability of extended range flying nets to capture targets at different distances
不同距离的碎片捕获示意如图12所示,飞网展开动力学仿真如图13所示。
图12 增程飞网捕获示意图Fig. 12 Extended range flying net to capture targets

图13 飞网以最大横向偏差捕获火箭末子级仿真图Fig. 13 Flying net captures the target with maximal lateral offset
结论:考虑各类偏差,增程飞网飞行200 m后,最大的横向偏差为2.98 m。当设计飞网尺寸为16 m×16 m,可以在150~200 m范围内实现对Φ2900 mm×4500 mm的火箭末子级可靠网捕。
3.3 增阻帆离轨效能分析
增阻帆在轨展开大面积薄膜帆面,利用低轨稀薄大气气阻效应加速空间碎片轨道衰减,直至坠入大气层烧毁。
增阻帆为正方形构型,在对角线上布置4 根弹性支撑杆。收拢时,4 根弹性桅杆缠绕在展开机构中心轴上;展开时,4 根弹性桅杆从展开机构的4 个角点弹出,带动帆面展开。增阻帆展开过程示意如图14所示。

图14 增阻帆展开过程示意图Fig. 14 The unfolding process of the increased drag sail
增阻帆方案如图15所示,具体任务过程如下:
图15 增阻帆方案Fig. 15 Increased drag sail
(1)在地面存储及运载飞行段:增阻帆收拢成圆柱体,压紧锁定;
(2)飞网捕获阶段:增阻帆收拢在操控星上的增程飞网一级组件内;
(3)增阻帆弹出阶段:操控星对空间碎片章动抑制和姿态机动任务后,弹出增阻帆。增阻帆的帆面在4根弹性支撑杆作用下有序展开;
(4)被动离轨阶段:操控星建立稳定的绳系组合体后,切断与增阻帆间系绳,增阻帆拖曳空间碎片降轨。
3.3.1 增阻帆展开动力学分析
为降低使用成本,增阻帆采用无源展开方式,弹性桅杆初始存储的弹性势能在解锁后转换为动能,带动薄膜帆展开。
采用有限元法对增阻帆进行展开动力学仿真。在增阻帆的4 根弹性支撑杆模拟初始内应力,模拟驱动力。通过增阻帆展开动力学分析可以确定增阻帆展开驱动力矩设置和展开形态,分析结果如图16所示。从仿真可知,弹性支撑杆伸展的最大加速度7.2 m/s2,展开到位时间不大于10 s,帆面展开平稳。
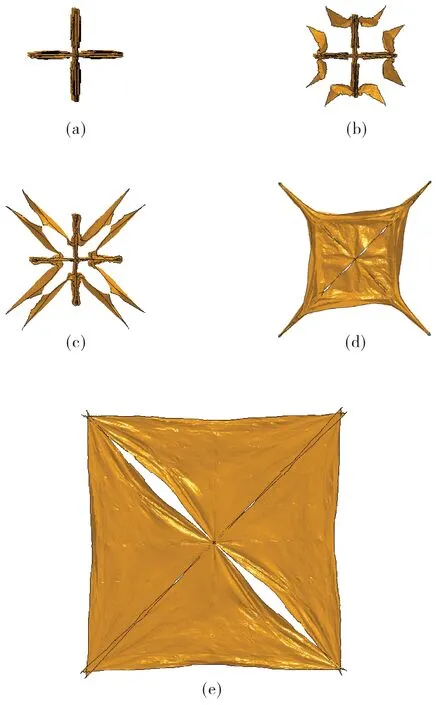
图16 增阻帆展开动力学仿真Fig. 16 Dynamic simulation of increased drag sail deployment
3.3.2 离轨效率分析
增阻帆增加绳系组合体的面质比,在气动力作用下加速离轨。气动阻力公式如下:
式中:CD为阻力系数,与绳系组合体形状、运行姿态以及轨道高度等有关,在150~600 km高度通常取CD=2~2.5;S为绳系组合体承受阻力的等效特征面积,根据多套阻力帆离轨实测数据,通常特征面积S取增阻帆面积的50%~60%;ρ为当地大气密度;V为绳系组合体相对大气飞行速度矢量。
假设增阻帆面积为25 m2,帆面法线平行于飞行方向,计算绳系组合体从600 km圆轨道降低至200 km以下的离轨时间。分析不同的绳系组合体质量的离轨时间:
①3 kg增阻帆+100 kg碎片,离轨时间0.9年;
②3 kg增阻帆+500 kg碎片,离轨时间3.9年;
③3 kg增阻帆+1000 kg碎片,离轨时间13.1年;
④3 kg增阻帆+1500 kg碎片,离轨时间16.9年。
不同质量空间碎片的离轨时间如图17所示。
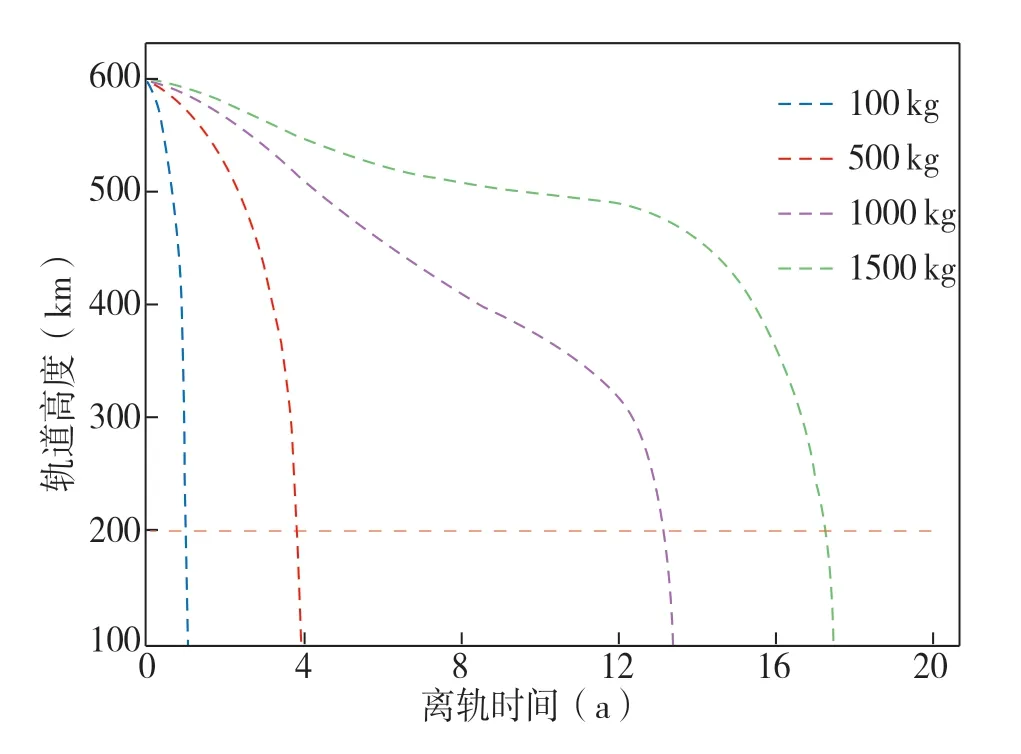
图17 不同质量的空间碎片离轨时间Fig. 17 De-orbit time of space debris of different masses
由图17可知,当空间碎片质量在1000~1500 kg时,仅靠增阻帆离轨仍需要10年以上时间才能再入大气。为加速离轨,可以通过操控星实施系绳拖拽减速,再释放增阻帆离轨。即利用操控星在空间碎片飞行后方实施网捕,之后操控星上的推力器对空间碎片减速,再弹出增阻帆,释放分离绳系组合体,从而加速空间碎片离轨。
4 结论
本文根据低轨米级空间碎片清除任务需求,提出捕获离轨一体化载荷方案,采用飞网捕获和增阻帆离轨方式开展低轨空间碎片清除任务流程设计与效能分析,论证方案可行性。在考虑操控星悬停指向控制偏差和飞网发射偏差等因素后,设计采用16 m×16 m的增程飞网具备在100~200 m范围内对火箭末子级等米级空间碎片实施飞网捕获的能力。之后,在操控星对绳系组合体章动抑制稳定后,释放增阻帆,加速空间碎片离轨。综上,本文所提方案有以下三个创新点:
(1)提出“飞网捕获+增阻帆离轨”一体化低轨空间碎片清除方案,相较传统飞网捕获主动拖曳离轨方案,本方案采用主、被动结合方式节省操控星推进剂使用量,具有较好的经济性。
(2)设计的新型飞网载荷采用二级发射技术,在增加飞网捕获距离的同时,减小飞网尺寸,在100~200 m范围内对米级空间碎片实施远距离捕获,提高操控星执行任务的安全性。
(3)设计的新型无源展开大尺寸增阻帆,相对有源展开方式降低研制成本的基础上,提高系统可靠性。
