空间碎片自主规避方法
2023-08-28邢林峰李克行薛超
邢林峰,李克行,薛超
(北京控制工程研究所,北京 100094)
1 引言
随着人类在外空日益频繁地开展航天活动,在轨航天器和空间碎片的数量剧增。据统计,人类累积发射航天器约9500颗,目前在轨正常运行的航天器约2700 颗,而其它的因丧失功能而变成了空间垃圾。其中有效载荷和失效的有效载荷占可跟踪物体总数的31.6%左右,运营碎片(与发射任务相关的物体)占28.5%左右,碎裂碎片(28.4%由火箭体引起,11.5%由航天器引起)占39.9%,前面提到的所有在轨可跟综物体只有6%左右是仍在轨工作的航天器[1,2]。截至目前,已发生过500 余次在轨航天器爆炸、解体、撞击事件,产生了数量众多的空间碎片。随着商业航天飞速发展,“星链”(Starlink)、“一网”(OneWeb)等低轨巨型星座计划稳步推进,未来航天器数量将呈指数上升,地球轨道空间变得愈发拥挤,航天器和空间碎片发生碰撞的风险激增,太空竞争加剧、袭扰增多,给航天器的安全运行带来了严峻挑战,为保证航天器安全稳定运行,亟待提升其自主感知规避防护能力。
从1979年开始,美国国家航空航天局(NASA)正式制订空间碎片研究计划[3-5],由约翰逊空间中心负责开展经常性的空间碎片观测数据收集和碎片地面建模的工作,基于地面观测结果,已建立起空间碎片数据库和预测模型,并开发了相应的分析软件[6,7]。我国自2000年以来,也基于地面观测数据,建立了空间碎片动态数据库。
“星链”也基于地面观测数据库,提高卫星的预警和规避能力。具体技术流程为:地面系统预报“星链”卫星轨道,并检索空间目标数据库(在轨大约20000 个目标),筛选潜在碰撞目标,计算碰撞概率,将高预警碰撞时刻和轨道控制上注卫星,卫星综合实现自动规避空间碎片和其他航天器的功能。
以上这些都是基于地面观测结果的空间碎片预警,地面观测结果的缺点是无法追踪10 cm以下的空间碎片。本文提出了利用碎片监测载荷提供的空间碎片测角、测距信息,结合航天器绝对轨道全球导航卫星系统(GNSS)信息,实现对空间碎片的自主轨道确定。此方法可发现和跟踪1~10 cm尺寸的空间碎片。在轨发现碎片并结合地面碎片监测数据库数据,当发现航天器与空间碎片有碰撞危险时能够自主安全评估和威胁告警,同时制定规避轨道机动策略,进行自主规避。
2 空间碎片主动规避原理及功能描述
2.1 空间碎片主动规避框架结构
航天器通过对自身运行轨道周围空间碎片的感知与识别,获取空间碎片轨道、运动等多维特征,更新在轨碎片数据库;并利用空间碎片轨道等特征,计算分析航天器与空间碎片的碰撞概率,对航天器安全进行评估和预警,并具备自主规避策略的制定和计算能力。
空间碎片主动规避框架结构由三部分核心内容组成,由上至下分为三个步骤,如图1所示。
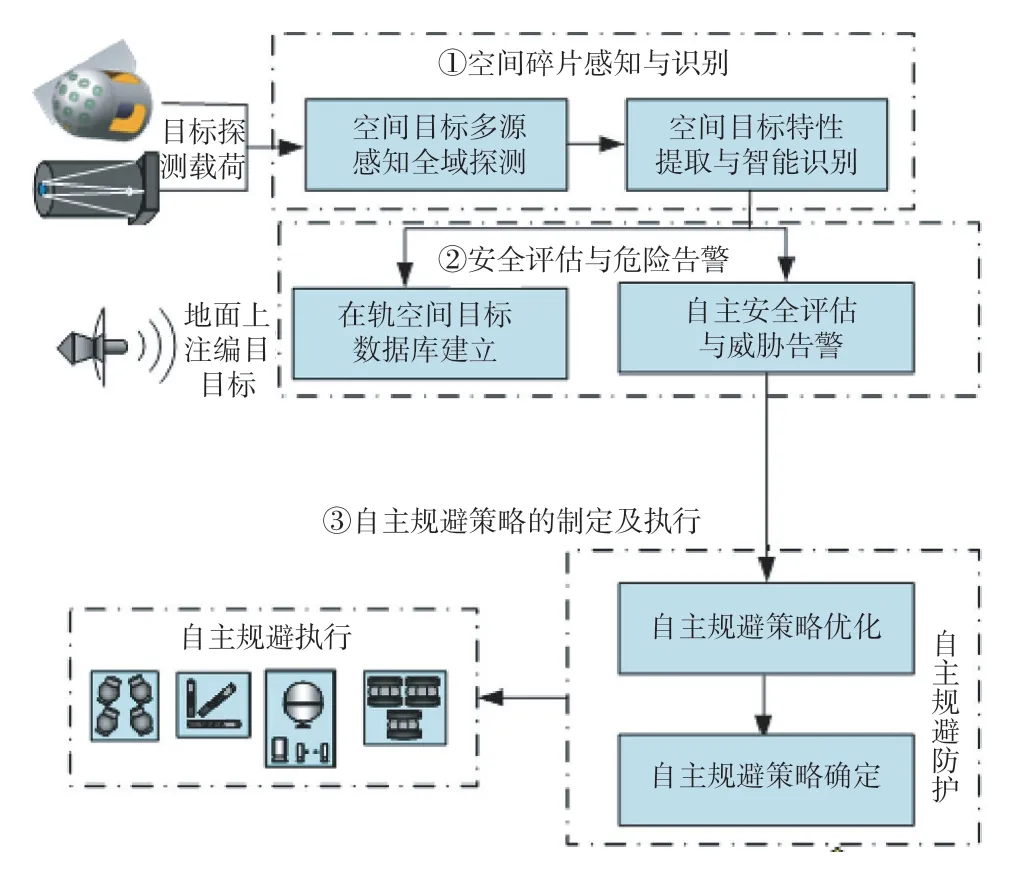
图1 空间碎片自主感知与主动规避方案Fig. 1 Space debris autonomous perception and active avoidance scheme
(1)空间碎片感知与识别
利用全向高灵敏度感知载荷和非合作碎片远距离测距载荷,对空间碎片及航天器运行轨道周边存在的碎片进行感知和判断,并进行实时定轨,获取的碎片轨道信息更新至数据库中;对于不在数据库中的碎片或者轨道信息差距较大的碎片,通过数据下行链路传输给地面,以协助地面进行信息更新,数据库应至少包含航天器运动轨道附近的空间碎片。
(2)安全评估与危险告警
根据航天器与碎片轨道等信息,采用基于接近几何关系和接近距离的碰撞概率计算方法,按照轨道预报模型和协方差预报模型,以及航天器与碎片的状态矢量和协方差矩阵向前预报,通过合适的接近分析算法,确定在未来某一时刻两物体距离达到最近的时刻,进而计算分析航天器碰撞碎片的概率。
(3)自主规避策略的制定及执行
自主规避策略需要根据碰撞几何关系、碰撞位置等信息综合制定。碰撞几何关系在碰撞概率中可以分析得到;碰撞位置的确定采用简化后的逐步逼近法确定。根据前期预警中最小相对距离是否小于最小安全距离,确定是否需要规避。
自主规避策略的制定与最小安全距离和预警与碰撞发生时间跨度有着密切的关系。选取合适的距离和时间跨度既可以确保有效规避,也可以最大程度上避免不必要的规避。因此需要构建准确的轨道计算、安全距离模型,充分考虑计算误差和轨道测量误差,以制定合适的规避策略,即选择合适的变轨时机、变轨量等[8,9]。
2.2 空间碎片主动规避步骤
空间碎片自主规避载荷利用碎片监测载荷提供的空间碎片测角、测距信息,结合航天器绝对轨道GNSS 信息,实现对空间碎片的自主轨道确定,从而进行编目;当发现航天器与空间碎片有碰撞危险时能够自主安全评估、发出威胁警告,同时制定规避轨道机动策略,进行自主规避。
空间碎片自主规避步骤如图2所示。
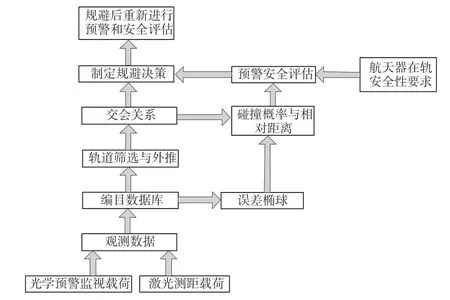
图2 空间碎片自主规避步骤框图Fig. 2 Block diagram of steps for autonomous space debris avoidance
具体步骤如下:
第一步,根据光学预警监视载荷获取空间碎片测角信息,通过激光测距载荷获取空间碎片距离信息,结合航天器自身的GNSS轨道信息,实现对空间碎片的自主轨道确定,生成碎片观测数据。
第二步,根据观测数据,计算出该空间碎片轨道,根据星上定时更新的编目数据库确认是已知碎片还是未知碎片,并对编目数据库再次更新。
第三步,对编目数据库空间碎片进行实时外推计算,并根据航天器的当前轨道,对空间碎片进行筛选,选取与航天器轨道相近的碎片,计算两者交会关系。
第四步,根据数据库编目精度,建立误差椭球,分析误差椭球与航天器安全球相对距离与碰撞概率。
第五步,根据航天器在轨安全性要求进行预警安全评估,再由评估结果以及与其它航天器之间的交会关系制定规避策略。
第六步,规避后重新进行预警,确定是否安全。
2.3 安全评估与威胁预警方法
根据航天器自身位置和速度信息,结合空间碎片的轨道信息,计算两者的相对距离和碰撞概率,综合相对距离和碰撞概率给出威胁等级,确定是否需要进行规避。
空间碎片与航天器接近过程中,二者在扰动情况下的轨迹散布可以用位置分布的3σ椭球来描述,这样轨迹安全问题就可以转化为接近轨迹上任一点τ0(t0γτ0γtf),空间碎片相对位置分布3σ椭球和航天器安全区域椭球之间的相对距离和碰撞概率分析问题,如图3所示。
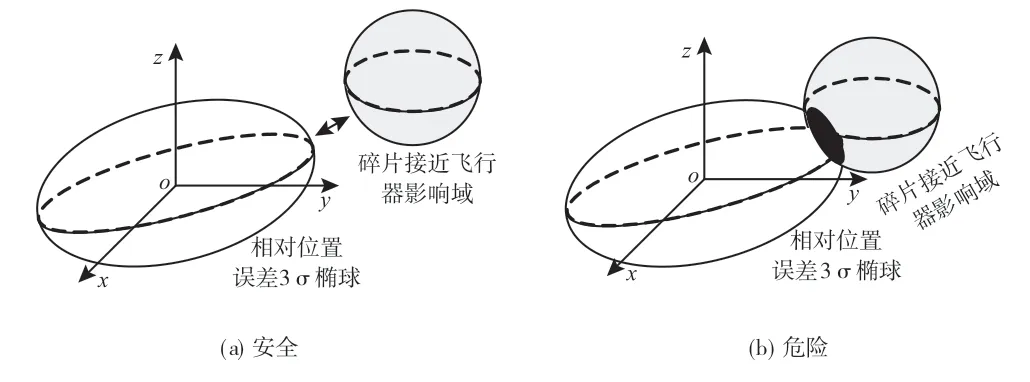
图3 误差扰动下的安全性评价Fig. 3 Safety evaluation under error perturbation
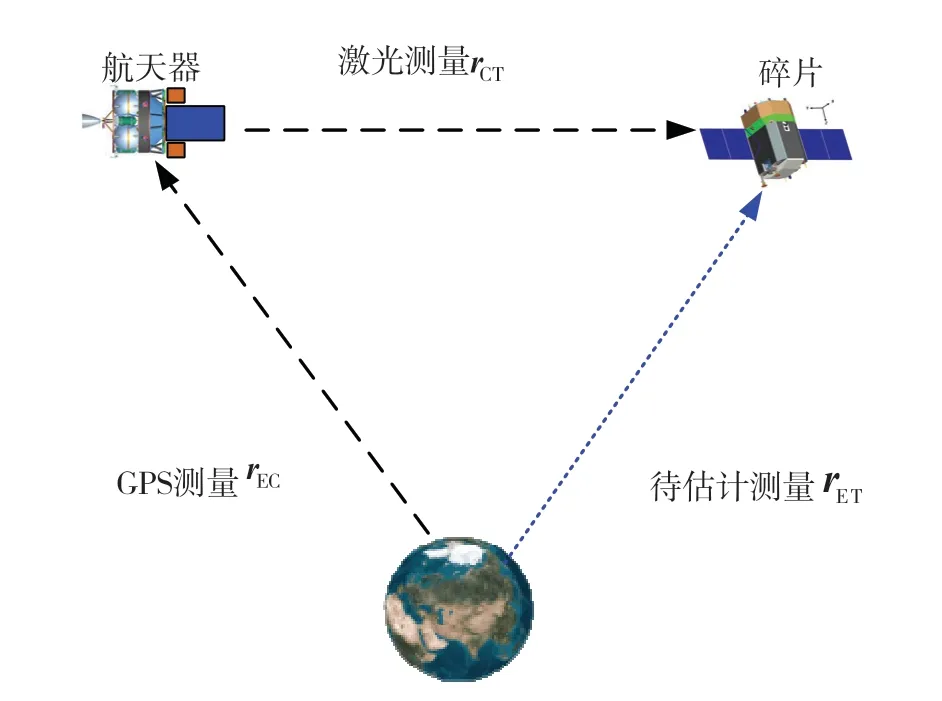
图4 空间碎片实时定轨方案Fig. 4 Real-time orbit determination scheme for space debris
根据航天器不同的在轨安全要求,设置具体碰撞规避阈值。例如国际空间站的碰撞规避阈值如下[10]:
①最快接近时间不大于45 h;
②局部垂直避碰距离不大于0.5 km,或碰撞概率不小于0.000001。
3 分析和仿真
3.1 误差分析
威胁空间碎片预警准确率主要来源于以下几个方面:
(1)航天器实时定轨精度
航天器一般采用星载GNSS 完成实时轨道确定,位置精度优于30 m,一般当碎片接近到航天器周围1 km内就需要进行规避机动,因此航天器实时定轨精度满足预警要求。
(2)空间碎片实时定轨精度
危险空间碎片定位主要利用航天器GNSS测量与星间测量来完成。通过航天器GNSS测量可以得到航天器在惯性系J2000.0系下位置和速度;通过激光雷达和航天器的姿态信息可以得到目标相对航天器的位置,利用矢量叠加原理可以得到目标惯性系J2000.0系下位置rET。为消除噪声影响,以rEC、rCT为观测量,轨道动力学方程为状态方程进行导航滤波解算,可对危险碎片实时定轨,精度优于100 m。
3.2 综合仿真
根据航天器自身位置和速度信息,结合空间碎片的轨道信息,可计算两者的相对距离和碰撞情况,需要参考前面分析的航天器实时定轨精度误差和空间碎片轨道确定误差。按航天器实时定轨精度优于30 m,碎片实时定轨精度优于100 m,对航天器与碎片之间距离误差进行仿真,误差小于100 m,具体如图5所示。综合相对距离和碰撞概率给出威胁等级。
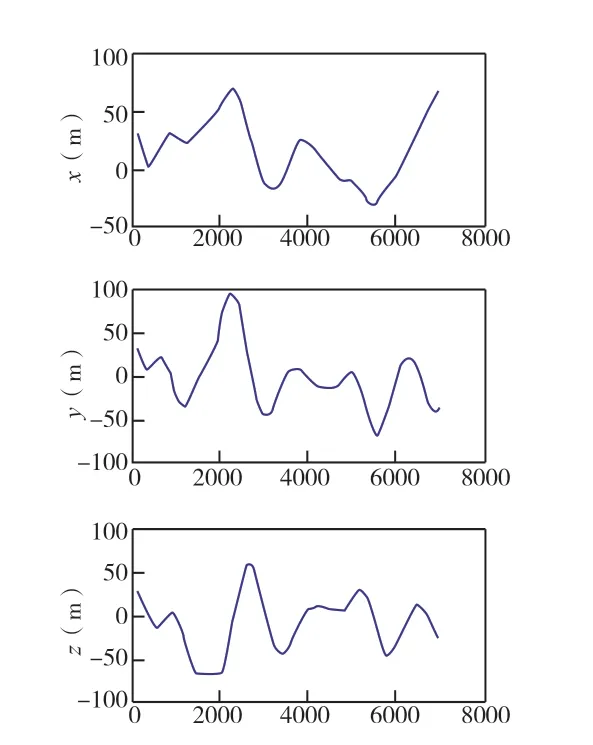
图5 航天器与碎片之间相对距离计算误差曲线Fig. 5 Error curve for calculating relative distance between spacecraft and debris
4 结论
为使航天器具备自主规避空间碎片的能力,本文给出了自主规避空间碎片的原理和方法。主要研究结论有以下几点:
(1)针对1~10 cm碎片,提出航天器在轨对其感知和识别方法;
(2)依据在轨发现碎片并结合地面碎片数据库,提出空间碎片主动规避框架和具体步骤;
(3)对空间碎片的安全评估与威胁预警方法;
(4)航天器与空间碎片间距离的误差分析与仿真。
以上结论可以作为航天器自主规避空间碎片的工程化依据。
