基于UUV的海洋环境测量系统设计
2023-08-25张龙伟李中政董黄伟
张龙伟,李中政,董黄伟
基于UUV的海洋环境测量系统设计
张龙伟1,李中政2,董黄伟1
(1. 杭州瑞利海洋装备有限公司,杭州 310023;2. 92859部队,天津 300061)
海洋环境测量是世界各国推进海洋战略的重要抓手,近年来我国海洋环境测量技术取得了很大的发展,本文以水下无人航行器(Unmanned Under-water Vehicle,UUV)为海洋环境测量平台,简述UUV水下环境测量的原理和特点。研究基于前视避障声纳及水声通讯等设备设计防碰撞的测量方法,讨论测量效率及应用方法,进行侧扫声纳地貌探测、噪声测量单元水文噪声测量及声速测量单元进行声速剖面测量。
UUV 侧扫声纳 噪声测量 声速剖面
0 引言
海洋环境物理参量信息对船舶航行安全、海洋生产活动、海上战场环境保障、气象水文建模等都具有重大意义[1],海洋环境信息的掌握是进行海洋开发、海洋环境保护、海洋管理和军事保障的主要决策依据[2]。海洋环境物理参量调查技术在海洋油气勘探、海底构造研究、油气管线调查、海湾大桥工程及海底隧道工程可行性研究等方面均取得了一定成功的经验。
传统的海洋环境物理参量服务采用的平台为水面测量船搭载探测设备的模式进行,近几年出现的无人艇(USV)、水下遥控机器人(ROV)、水下自控机器人(AUV)等新平台技术的逐渐成熟,也丰富了探测的手段,并提高了探测的效率。国内外目前有很多研究机构和公司开展了海洋环境物理参量测量平台自动化方面的研究,UUV是研究中的热点,在军事和民用都有广阔的应用前景。
1 测量系统设计
UUV是一种可潜入水下,依靠自带能源、自推进、遥控或自主控制,通过配置海洋环境测量设备对海底地貌测绘、水文气象和海洋水声监测[3]。本测量系统设计组成如图1所示。基于UUV的海洋环境测量系统具备体量小、隐蔽性高、自主性强等优点,通过配置不同载荷设备即可执行不同任务,能回收和反复使用,在海洋环境测量、海底地形测绘和水下障碍物搜索定位等方面具备广泛的应用前景。
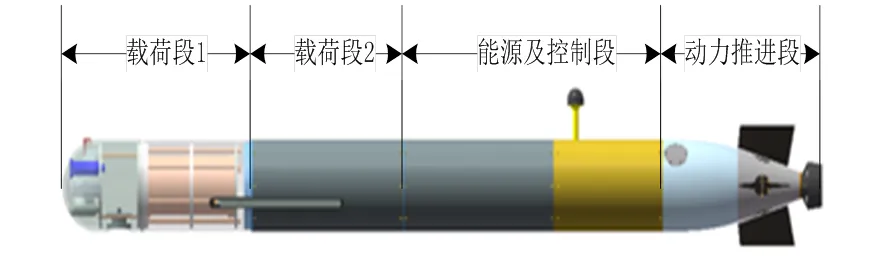
图1 基于UUV的海洋环境测量系统
测量系统主要由平台子系统和载荷子系统组成。组成框图如图2所示。其中载荷子系统安装于载荷段1中,该仓设计外形与平台子系统外形尺寸相同,共用流体力学设计规则,之间采用径向密封及螺钉固定的方式连接,保证在水下航行过程中保持姿态稳定性。密封段与透水段之间采用密封端盖连接,外部接口均采用水密连接器及水密缆,实现舱段之间的电气连接。载荷子系统供电从平台子系统管理单元引出。
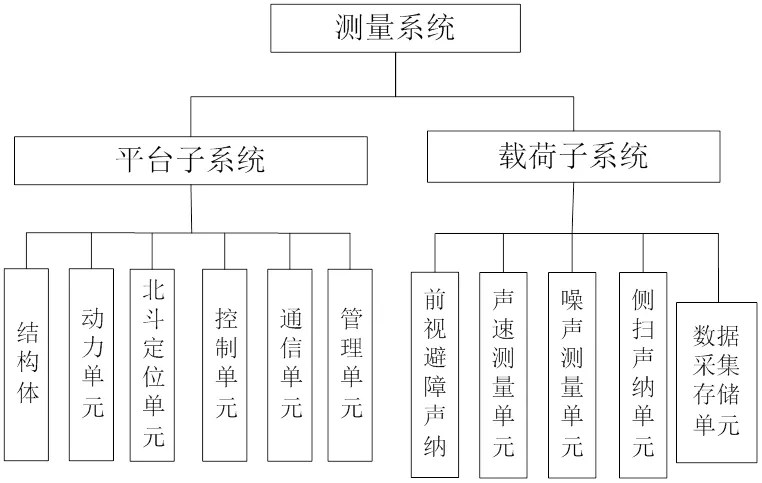
图2 测量系统组成框图
载荷子系统通过在受力较小及不需要水密的透水部分,选用密度较小的材料进行设计,并在空隙部位增加浮力材料提升重量配平工作。在电子仓内电路板之间间隙也放置浮力材料,进一步增加载荷子系统的配平能力。载荷子系统布局设计如图3所示。其中侧扫声纳单元换能器采用嵌入式安装方案,将换能器嵌入到UUV外壳开槽中,将换能器线穿入舱体内部,接至电路。换能器安装角度设定为通用模式的140°。
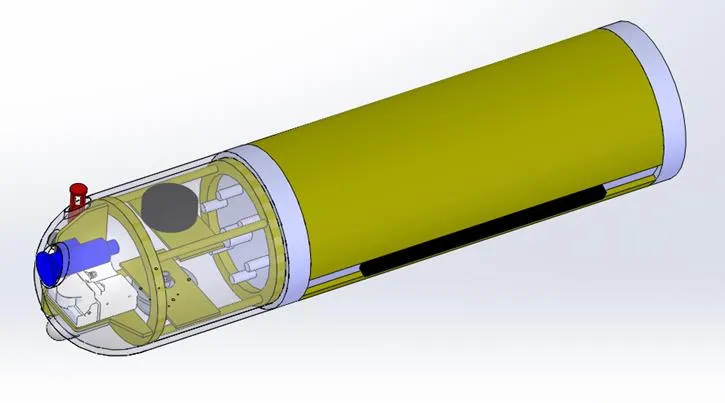
图3 载荷子系统设计示意图
2 功能设计
2.1 通讯功能
在海洋环境中,声音传播的距离与频率紧密相关。为了选取合适的中心频率,最佳工作频率计算如下所示[4]:
当通信距离为2 km时,fc=20 kHz;当通信距离为3 km时,通信频段为16 kHz。所以,综合考虑技术指标要求和系统的稳定性,并兼容一定的通信带宽要求,本测量系统选用设备工作频率设置为8 kHz~16 kHz,通信速率≥6 kbps,通信距离≥22 km,误码率≤10-4。
2.2 水下定位功能
水下定位利用信标发射信号到达接收基阵之间的时延差和测量信标到基阵中心的斜距进行,本测量系统使用水下定位设备工作频段为20~30 kHz,定位精度为1m±1%R(R为斜距,垂直入射角<60°),作用距离1500 m,可同时定位5个目标。
2.3 前视避障
前视避障功能选用适用于水下成像领域而设计的超小型、低功耗多波束成像声呐。采用先进的实时多波束形成成像技术和先进的信号处理平台,实现0.75 cm的距离分辨率和最大60 Hz的图像刷新率,确保视频级声呐成像。设备工作频率为720 kHz,水平接收波束宽度为1°,垂直发射波束狂赌20°,水平波束开角范围120°,最远探测范围可达120 m。
2.4 噪声测量
噪声测量单元性能指标如下:
工作频率范围: 20 Hz~10 kHz;
水听器声压灵敏度(含前放):≥-170dB(前放增益26 dB),一致性±1.5 dB;
前放增益调节:20 dB、26 dB、32 dB、38dB
采样频率:最大64 kHz,可调节;
精度:24位;
自噪声:不大于38 dB re uPa/√Hz @ 1kHz;
测量信号动态范围:100.6 dB;
2.5 地貌测量
侧扫声纳式基于回声探测原理进行水下目标探测,工作时换能器按照设计频率发射和接收声波,并得到一系列回波。由于换能器接收到的水底各点回波的时间有先后之分,当声波船舶距离越远时,换能器接收到回波的时间越长,且距离越远回波信号越弱[5],回波强度如图3所示。
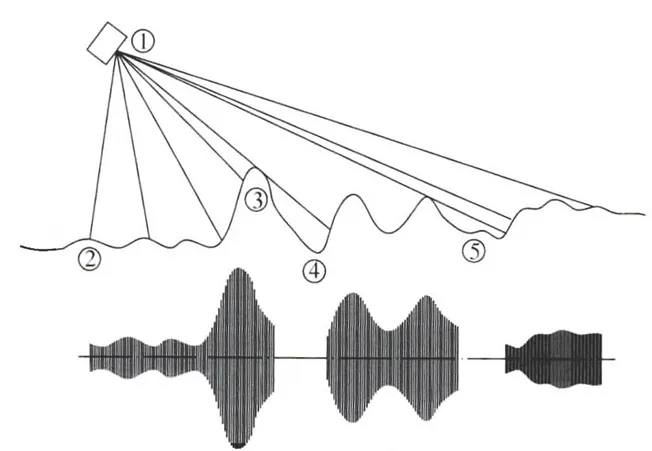
图4 侧扫声纳回波强度示意图
侧扫声纳技术指标参数如表1所示。
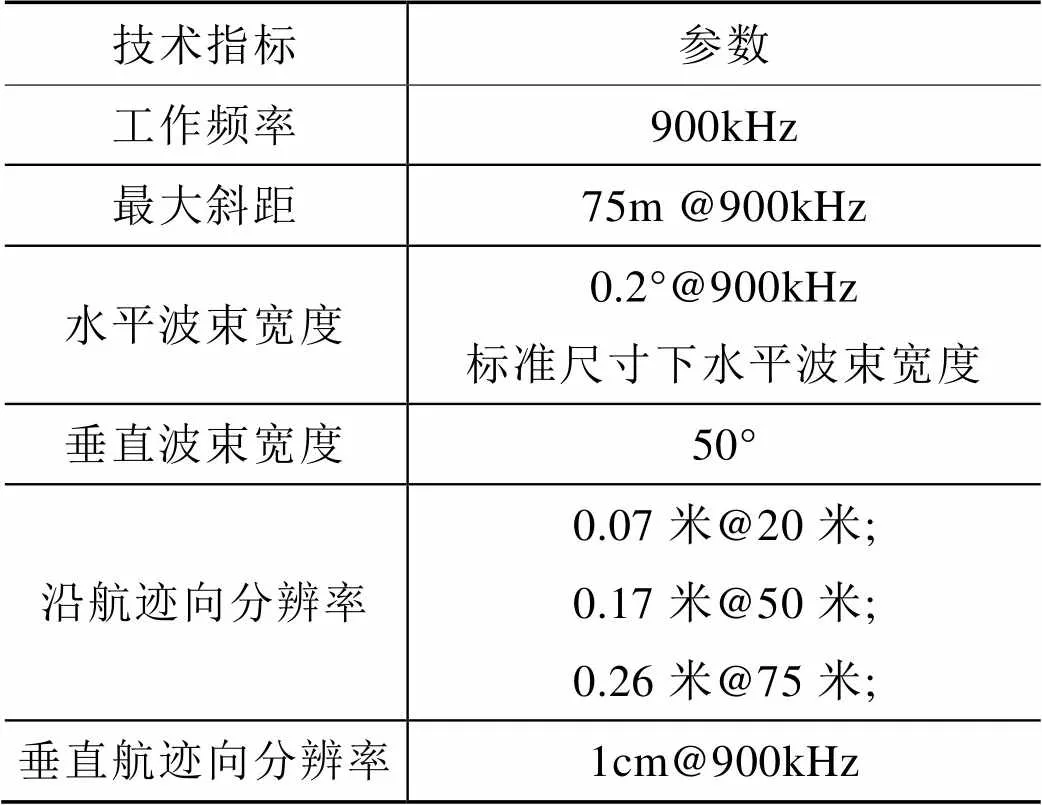
表1 技术指标参数
2.6 声速测量
声速测量单元是专门用于测量声波在水中传播速度的仪器,可通过RS232协议与计算机进行通信。
3 测量方法
UUV能够顺利完成任务必须有一条安全最优的路径提供保障。在路径规划中,所生成的路径质量对UUV的安全航行和成功完成任务起到了至关重要的作用[6]。本系统为测量系统设计一种“弓”自行测量路径,设计路径如图4所示。
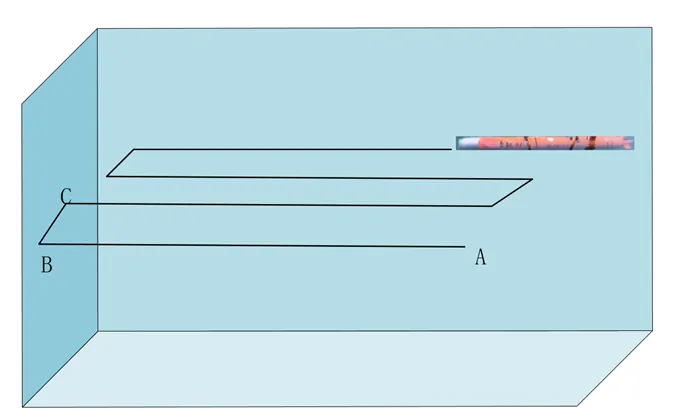
图4 UUV测量路径规划示意图
其中AB及其平行线为测量单元测量路径,BC及其平行线为转向区域。为满足侧扫声纳获取到的地貌数据质量,设计中的路径间隔为100 m。测量平台根据侧扫声纳数据进行底跟踪处理,可获取到距离海底的高度信息作为离底高度参数。前视避障声纳可实时获取到测量系统前进方向声学影像信息,根据回波信息将前进方向左右各45°以每度一位共90位,零表示安全,1表示有障碍物。平台子系统控制单元根据前视避障声纳数据保障探测作业安全。
4 试验与测试情况
海底侧扫声图像可分类为:目标图像、地貌图像和水体图像等。
目标图像包括沉船、礁石、电缆、水下障碍物及水下建筑物等。同时根据判释声图的不同需要,还可作进一步分类。
地貌图像包括沙带、沙川、断岩、沟槽及各种混合形成的地貌图像。
水体图像包括水中散体条纹、温度跃层、尾流块状、水中气泡等图像。
声图像的相关特性和各自特征其依据是图像形状、色调、大小、阴影和相关体等。形状是指各类图形的外貌轮廓,色调是指衬度和图像深浅的灰度。大小是指各类图像在声图上的几何形状大小,阴影是指声波被遮档的区域,相关体是指伴随某种图像同时出现的不定形状的图像。
测试数据如图5~图7所示。
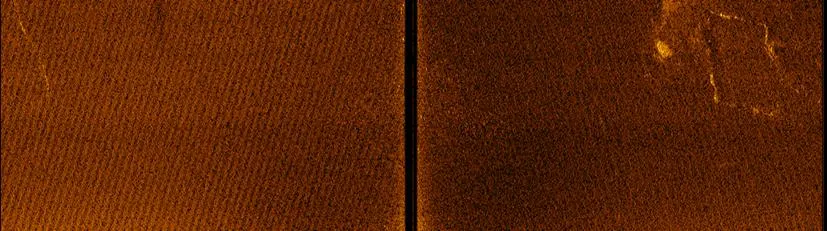
图5 测量系统获取到的地貌数据
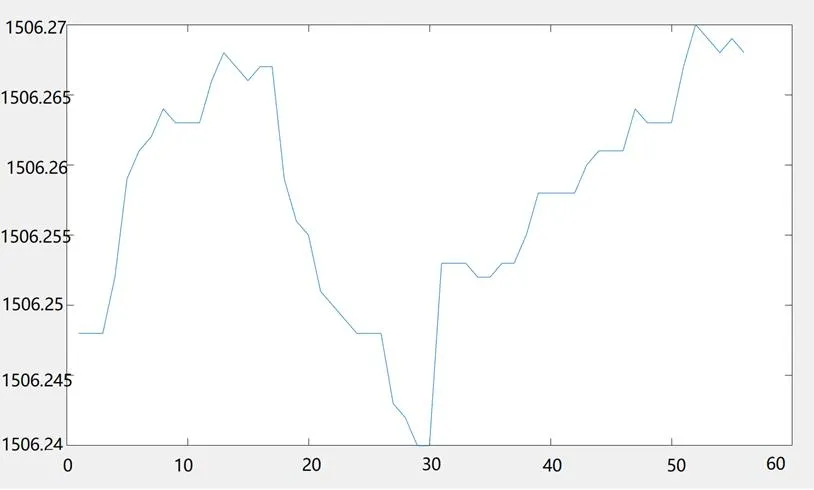
图6 测量系统获取到的声速数据
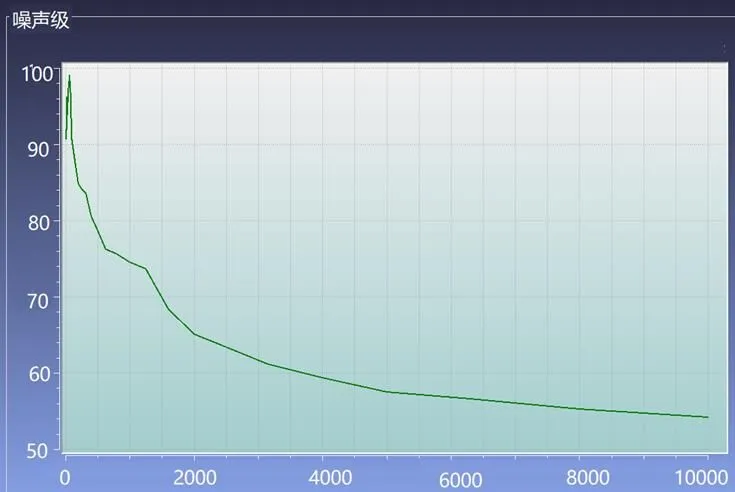
图7 测量系统获取到的噪声数据
5 结语
本文中UUV测量系统采用模块化设计,平台子系统和载荷子系统设计为分仓模式,通过合理设计。有关航行及平台安全系统集中设计在平台子系统中。有关水文环境测量功能单元单独设计舱段。各舱段配置为弱正浮力,通过设计为统一机械接口可完成组合或单一载荷单元作业模式,使测量系统具备功能可调节性。根据探测功能需求可进行快速更替载荷段,使测量系统具备多功能用途。
目前UUV平台多采用螺旋桨作为推进装置,可以通过改进UUV推进系统为泵喷系统,来降低推进系统噪声,提升噪声测量单元对水文环境噪声测量能力。
[1] 刘振冲, 船载海洋水文环境测量系统研究与设计[D]. 江苏科技大学, 2016.
[2] 陈奎英, 兴海强国—加快海洋信息化建设步伐[J]. 海洋信息. 2004,(2): 4-7.
[3] 陈强, 国外UUV系统在海洋调查中的应用, 舰船科学技术. 2012, (10): 133-136.
[4] 王蕾, 悬跨海底管道的侧扫声纳检测方法[J]. 石油机械. 2013, 41(5): 50-54.
[5] 于辉, 自主式水下机器人路径规划的研究, 华中科技大学. 2014, (10).
[6] 于大海, 弱通信条件下的多水下机器人任务分配方法研究[D]. 哈尔冰工程大学, 2013.
Design of a marine environment measurement system based on UUV
Zhang Longwei1,Li Zhongzheng2,Dong Huangwei1
(1. Hangzhou Ruili Marine equipment Co., Ltd., Hangzhou, 310023; 2. Unit 92859, Tianjing 300061, China)
TM612
A
1003-4862(2023)08-0038-04
2023-06-01
张龙伟(1988-),男,工程师。主要从事电子电路、磁学及地球物理勘测方向技术研究。E-mail: 940600624@qq.com
