基于方波信号注入的永磁同步电机位置检测方法研究
2023-08-25郝清亮何忠祥徐为勇
郝清亮,何忠祥,徐为勇
基于方波信号注入的永磁同步电机位置检测方法研究
郝清亮,何忠祥,徐为勇
(武汉船用电力推进装置研究所,武汉 430064)
针对本文研究对象船用无轴推进永磁同步电机,本文给出了一种基于方波信号注入的永磁同步电机位置检测方法。根据两相静止坐标系下高频模型,通过定子高频电流分量获得位置辨识偏差信息,进而通过机械PID型Luenberger位置跟踪观测器得到位置信息。最后通过仿真验证了本文理论分析的正确性和所提策略的有效性。
永磁同步电机无位置传感器方波注入 Luenberger
0 引言
永磁同步电机具有高功率密度、高转矩电流比的特点,已经广泛应用于工业现场、电动汽车、家用电器等领域。无位置传感器控制技术能够有效减小系统体积和成本,增加系统可靠性,已成为当今研究热点。根据转速适用范围不同,无位置传感器PMSM 控制技术主要可分为两类:一类适用于中高速运行,主要利用基频激励的反电动势或者磁链信息进行转子位置估计,即模型法;另一类适用于低速(零速)运行,利用电极凸极特性获取转子位置信息,该方法能够有效观测低转速下的转子位置。
目前,已有多种PMSM 转子初始位置估计方法相继被提出[1-4]。其中,比较典型的方法是首先利用基于凸极追踪的方法(高频信号注入法)观测转子位置,然后利用短脉冲电压注入法或二次谐波分量法辨识磁极极性。此类方法鲁棒性较强,然而短脉冲注入法难以确定脉冲宽度和幅值、实现困难;且该方法是独立于高频注入法磁极位置估计的辨识过程,使得高频注入法被迫中断、无持续性,因此该方法无法实现自由运行条件下初始位置检测。
本文给出了一种基于方波信号注入的永磁同步电机位置检测方法,基于两相静止坐标系下高频模型,通过提取定子高频电流分量获得位置辨识偏差信息,进而通过机械PID型Luenberger位置跟踪观测器得到位置信息。最后通过仿真验证了本文理论分析的正确性和所提策略的有效性。
1 方波注入高频信号模型
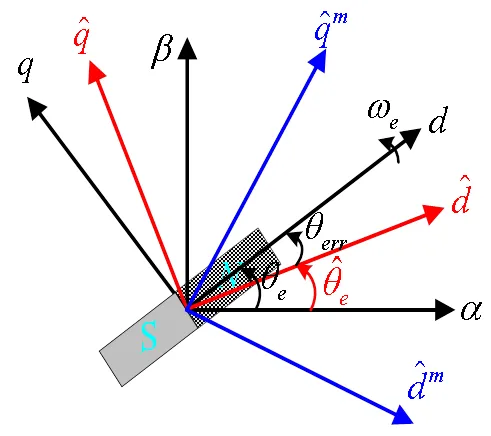
图1 PMSM坐标系统
在同步dq旋转坐标系下的标准数学模型为
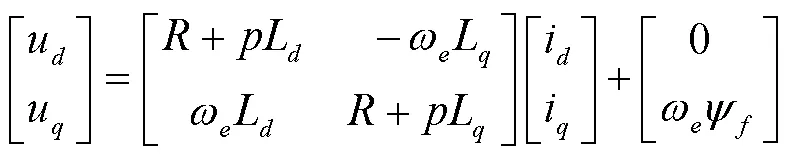
由于注入方波电压信号频率远大于基波运行频率,因此忽略定子电阻压降和反电动势影响,IPMSM 在高频信号激励下可等效为感性负载,由此可得
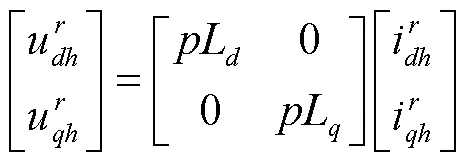


结合坐标变换,可得:


2 静止坐标系位置辨识方法
2.1 辨识策略

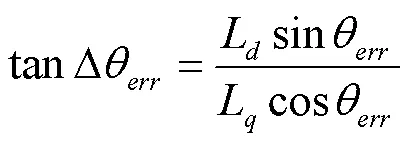
则式(7)转化可得:
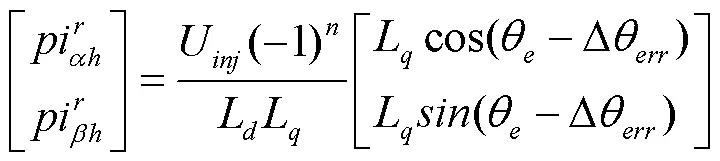
从式(9)可见,定子轴系高频电流响应包络中含有位置信息。
基于方波信号注入的永磁同步电机位置检测可通过以下方法实现:首先通过信号分离得到高频注入电流,计算得到高频注入电流的微分,提取幅值信息,最后通过反正切函数计算跟踪转子位置信息,如图2所示。
由于反正切函数计算对噪声比较敏感,鲁棒性差。因此,本文采用矢量叉乘方法解耦位置误差信息,采取标幺化处理能够避免位置误差信息受电感参数变化的影响。

图1 静止轴系下位置辨识方框图
2.2 性能分析

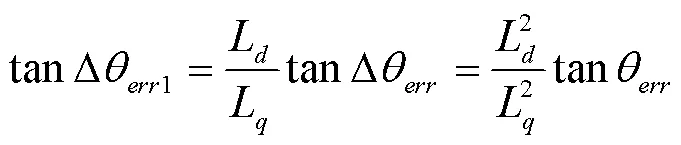
经过无限次迭代,转子最终位置辨识结果为:

图3 不同凸极率下,位置辨识偏差收敛特性
3 信号分离提取策略
3.1 分离策略
通常需要采用滤波器实现载波与基波信号的分离。滤波器会限制系统带宽,降低响应速度。由于注入方波信号的频率远高于基波运行频率,在相邻采样时刻认为基波电流恒定,高频响应电流为:

3.2 Luenberger观测器
基于机械模型的PID类型Luenberger位置跟踪观测器,其原理框图如下所示。
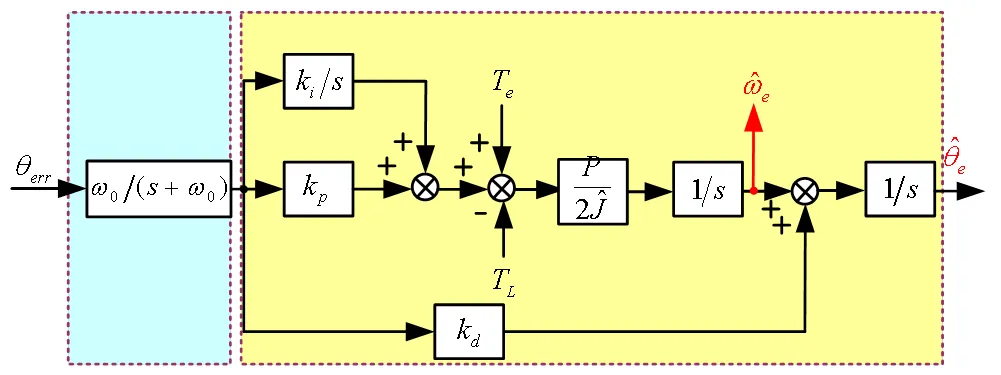
图4 Luenberger位置跟踪观测器
本文给出的Luenberger位置跟踪观测器状态观测器可以描述为:

设:

可得:


当观测器配置较大的极点时,观测器的响应速度提高,但噪声的抑制作用同步降低。
4 仿真和分析
为验证本文理论分析的正确性,对一台船用永磁同步电机进行了仿真验证,电机参数如下:额定功率8.7 kW,额定线电压100 V,额定电流50 A,额定转速600 r/min,极对数为4,定子电阻1.2 Ω,交轴电感700 μH,直轴电感400 μH,方波注入电压幅值为10 V。
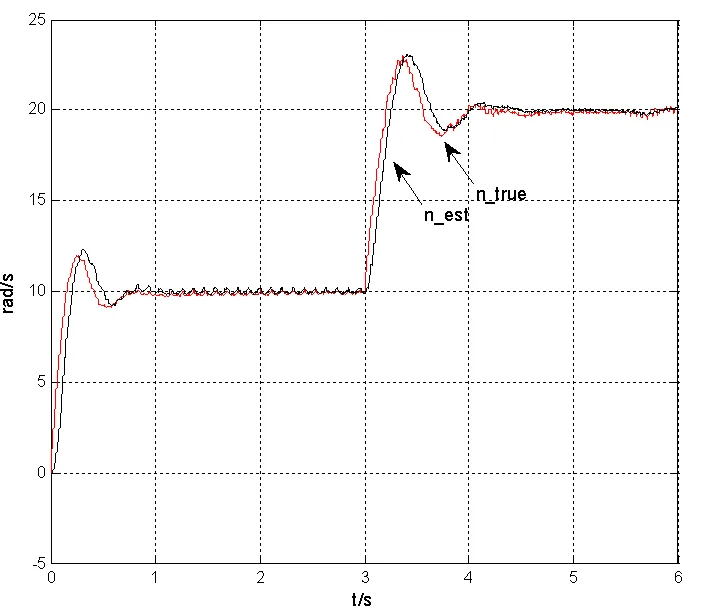
图5 电机速度辨识值波形图
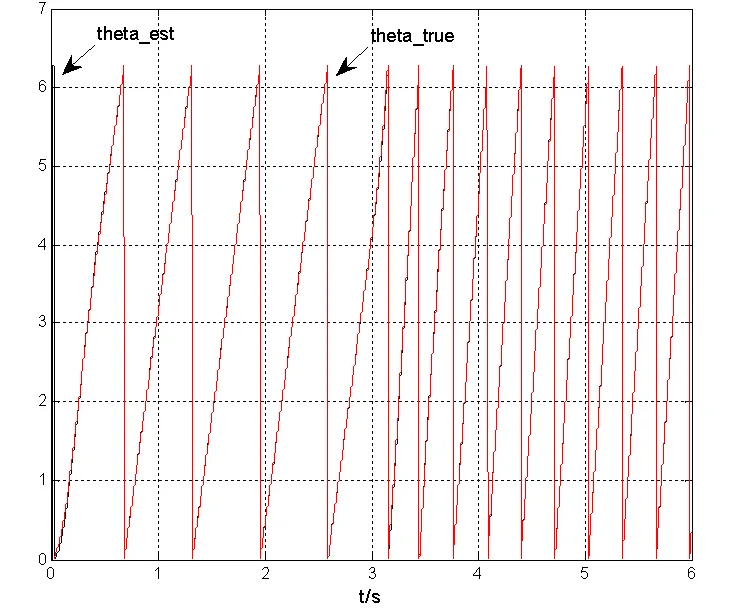
图6 电机位置辨识值波形图
图5和图6为给定电角速度10 rad/s启动,在t=3 s给定电角速度变为20 rad/s时,电机转速和位置辨识值和实际值的波形图;图7为电机位置辨识偏差。
由此可见,基于方波信号注入的永磁同步电机位置辨识在保证转速跟踪给定的前提上,可实现了角度的无延迟观测。从上可得,基于电机凸极效应的位置辨识策略,选择角度偏差作为反馈调节量,因而当转速给定变换时,辨识位置偏差先于转速偏差稳定。

图7 电机位置辨识偏差波形图
5 结论
本文给出了一种基于方波信号注入的永磁同步电机位置辨识方法,通过建立两相静止坐标系下的方波注入高频信号模型,还详细分析了凸极率、Luenberger观测器对位置辨识偏差收敛性的影响,
最后进行了仿真验证。本文结果表明:
a)位置辨识偏差受电机凸极率的影响,并且指数收敛;
b)采用加减运算可实现方波、载波信号的分离,可进一步提高系统带宽,提高收敛速度;
c)基于机械模型的Luenberger位置跟踪观测器可以提高给定变化时位置辨识的精度。
[1] 薛映霞, 陈庆, 何凤有. 高频方波注入的永磁电机无传感器控制改进算法[J]. 电气传动, 2017, 47(2): 15-19.
[2] 张国强, 王高林, 徐殿国. 基于无滤波器方波信号注入的永磁同步电机初始位置检测方法[J]. 电工技术学报, 2017, 32(13): 162-168.
[3] 尹忠刚, 张彦平, 张延庆. 采用免疫高频脉动信号注入的 PMSM 转速辨识方法[J]. 电工技术学报, 2016, 31(s2): 243-254.
[4] 万山明, 吴芳, 黄声华. 基于高频电压信号注入的永磁同步电机转子初始位置估计[J]. 中国电机工程学报,2009, 28(33): 82-86.
Research on PMSM position detection method based on square wave signal injection
Hao Qingliang,He Zhongxiang,Xu Weiyong
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China )
TM341
A
1003-4862(2023)08-0019-04
2023-01-03
郝清亮(1979-);男,研究员。研究方向:电机与电器。E-mail: 237632488@qq.com
