水下航行器上方三分量磁场高精度测量技术研究
2023-08-25刘瑞杰王雪仁胡佳飞刘中艳
管 峰,刘瑞杰,庄 飚,王雪仁*,张 琦,胡佳飞,刘中艳
水下航行器上方三分量磁场高精度测量技术研究
管 峰1,刘瑞杰1,庄 飚1,王雪仁1*,张 琦2,胡佳飞2,刘中艳2
(1. 中国人民解放军92578部队,北京 100161;2. 国防科技大学智能科学学院,长沙 410073)
本文提出了一种基于“三轴磁传感器+姿态传感器”相结合的水下航行器上方三分量磁场动态补偿测量方法,分析了高精度补偿测量原理,研究建立了三轴磁传感器坐标系下磁场测量值向地理坐标系下的坐标变换矩阵,并完成了试验验证。试验结果表明,应用水下航行器上方三分量磁场动态补偿测量方法后,磁场测量值标准差降低了90%-95%,大幅提升了磁场测量系统抗抖动性能,这验证了该方法对提升水下航行器上方三分量磁场测量精度的有效性。
移动行车 三轴磁传感器 姿态传感器 水下航行器磁场 动态测量
0 引言
水下航行器的铁磁性材料在地球背景磁场磁化作用下,在其周围将产生局部磁异常,这种磁场将成为航空磁探系统与磁引信水雷探测和攻击水下航行器的重要靶源,严重影响隐身的性能[1]。水下航行器进行消磁处理是保持或提升磁隐身性能的重要途径,而准确地测量评估水下航行器上下方磁场(特别是三分量磁场)是进行高效消磁处理的前提。相对传统消磁洞库中固定式传感器阵列测量水下航行器上方磁场方式,采用移动行车方式测量水下航行器上方磁场既能保证消磁站可兼顾高桅杆水面舰艇消磁,同时又可有效避免舰艇消磁过程中强磁场对上方磁场测量系统影响(消磁处理时可将行车移开),这将成为未来消磁站广泛应用的水下航行器上方磁场测量方式。
在基于移动行车的水下航行器上方磁场测量中,将三轴磁传感器搭载在移动行车的水平桁架上,沿艇艏艉方向往复移动可实现水下航行器上方磁场的扫描式测量。但在移动测量过程中,行车运动会导致三轴磁通门传感器产生抖动,使得三分量磁场测量误差增大,难以满足对水下航行器上方三分量磁场测量和评估的需求。
本文提出一种基于“三轴磁传感器+姿态传感器”相结合的水下航行器上方三分量磁场动态补偿测量方法,三轴磁传感器可测量三个垂直方向上的磁场矢量,姿态传感器实时感知行车移动过程中三轴磁传感器的姿态信息,利用综合信息处理模块将三轴磁传感器测量的磁场分量解算到统一坐标系下,得到水下航行器三分量磁场。该方法具有操作简单、能够实现水下航行器分量磁场的动态测量,且抗抖动性能好、测量精度及可靠性高等优点。
1 水下航行器上方三分量磁场高精度测量原理
如图1所示,本文提出了一种基于“三轴磁传感器+姿态传感器”相结合的水下航行器上方三分量磁场动态补偿测量方法,磁场测量系统单元布置在移动行车的水平桁架上,移动行车沿水下航行器艏艉方向往复移动,可实现水下航行器上方三分量磁场的扫描式高精度测量。如图2所示,磁场测量系统由三轴磁传感器和姿态传感器组成,三轴磁传感器可测量三轴磁传感器坐标系下水下航行器三分量磁场,姿态传感器可提供三轴磁传感器相对于地理坐标系的姿态信息,通过建立坐标变换矩阵,将三轴磁传感器坐标系下的测量值转换为地理坐标系下的三分量,最终得到地理坐标系下水下航行器三分量磁场测量值。该方法可较好地解决移动行车运动过程中的抖动对三分量磁场测量的影响,进一步提升水下航行器三分量磁场测量精度。
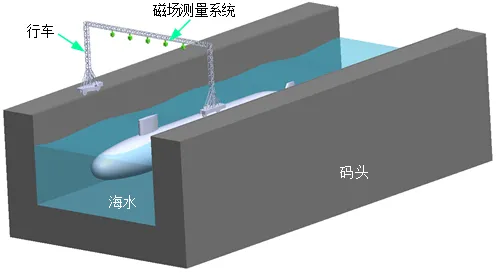
图1 基于移动行车的水下航行器上方三分量磁场动态补偿测量方案

图2 水下航行器磁场三分量测量系统
2 磁场-姿态融合算法
水下航行器上方三分量磁场动态补偿测量的关键是建立三轴磁传感器坐标系下测量值向地理坐标系的坐标变换矩阵,其具体算法流程如下所示。



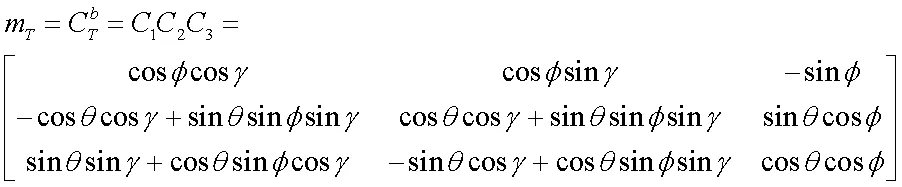
式中:

基于上述算法,通过坐标变换可得到地理坐标系下的水下航行器上方三分量磁场值,消除磁场测量系统运动抖动导致的测量误差。
3 水下航行器上方三分量磁场动态补偿测量验证
3.1 试验验证系统
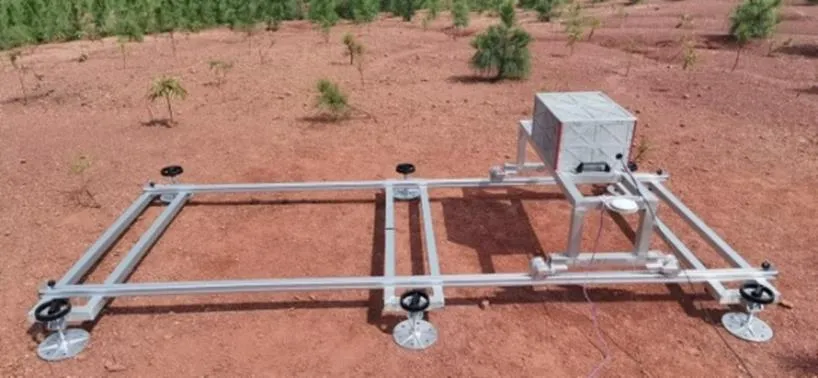
本文搭建的水下航行器上方三分量磁场动态补偿测量验证系统如图3所示。磁场测量系统包含MAG13三轴磁通门传感器、捷联惯导(由激光陀螺和加速度计构成)、质子梯度磁力仪、水平仪、数据采集和处理电路模块及软件、带偏心轮的移动行车缩比模型、电脑(记录、处理及保存测量结果)等。其中,MAG13三轴磁通门传感器主要性能参数:噪声水平<4pTrms/√Hz,量程是±60微特至±1000毫特,带宽是3千赫兹;捷联惯导系统主要性能参数:激光陀螺零漂优于0.003度/小时,角度测量分辨率是1×10-4°,加速度计精度优于1×10-6米/秒2。为有效模拟移动行车运动带来的抖动,设计偏心半径为1毫米的轮子,以此验证三分量磁场动态补偿效果。具体步骤如下:
1)利用质子梯度磁力仪标定地球背景磁场,选取梯度变化在0.01纳特/米以内区域作为测试区域,将水下航行器上方三分量磁场动态补偿测量验证系统放置在该测量区域内。
2)搭建水下航行器上方三分量磁场动态补偿测量验证系统,在移动行车水平导轨上放置水平仪,通过调节导轨基座支脚高度,保证导轨水平。
3)移动行车搭载磁场测量系统在水平导轨上匀速运动,记录往返5次共10组三轴磁场传感器和姿态传感器输出值,如图4、5所示。
4)基于式(4)所确定的三轴磁传感器及地理坐标系之间的坐标变换矩阵,利用三轴磁场传感器和姿态传感器输出值,求解得到地理坐标系下水下航行器三分量磁场。姿态补偿前后水下航行器上方三分量及总量磁场测量结果如图4所示,地理坐标系下水下航行器上方三分量磁场测量值标准差统计如表1所示。

图4 姿态补偿前后磁场三分输出值对比图

图5 姿态传感器输出值

表1 有/无姿态补偿时三分量磁场测量值统计表
图4及表1表明,利用姿态传感器进行补偿后,地理坐标系下水下航行器上方三分量磁场测量值标准差降低了90%~95%,大幅提升了磁场测量系统抗抖动性能,实现了水下航行器上方三分量磁场的稳定、高精度动态测量。
4 结语
本文提出了一种基于“三轴磁传感器+姿态传感器”相结合的水下航行器上方三分量磁场动态补偿测量方法,建立了三轴磁传感器坐标系下磁场测量值向地理坐标系的坐标变换矩阵,并完成了试验验证。应用水下航行器上方三分量磁场动态补偿测量方法后,磁场测量值标准差降低了90%~95%,这表明,该方法可应用于提升水下航行器上方三分量磁场测量精度。
[1] 李宏静, 邓晏, 刘广伟, 齐彬, 李宝河, 俱海浪. 地磁三分量的测量研究[J]. 科技创新与应用, 2014, 15: 16.
[2] 闫辉, 肖昌汉. 一种海洋环境地磁场三分量的测量方法[J]. 海军工程大学学报, 2005, 17(6): 80-83.
[3] 隗燕琳, 肖昌汉, 陈敬超, 等. 由舰船垂向分量磁场获得其三分量磁场的研究[J]. 哈尔滨工程大学学报, 2008, 29(2): 111-114.
[4] 张琦, 潘孟春. 基于线性化参数模型的三轴磁场传感器校准方法[J]. 传感器技术学报, 2012, 25(2): 215-219.
[5] 庞鸿锋. 捷联式地磁矢量测量系统误差分析及校正补偿技术[D]. 国防科学技术大学, 2015.
Research on high-precision measurement technology of three-component magnetic field above underwater vehicle
Guan Feng , Liu Ruijie, Zhuang Biao, Wang Xueren, Zhang Qi, Hu Jiafei, Liu Zhongyan
(1. 92578 Unit of the PLA,Beijing 100161,China;2. College of Intelligence Science and Technology, National University of Defense Technology,Changsha 410073,China)
G642.0
A
1003-4862(2023)03-0015-04
2023-02-13
管峰(1989-),男,博士。研究方向为舰船隐身。E-mail: wangxueren@aliyun.com
