改进型永磁同步电机双矢量MPTC策略
2023-08-25张成,谢豪,戴璐
张 成,谢 豪,戴 璐
改进型永磁同步电机双矢量MPTC策略
张 成1, 2,谢 豪1,戴 璐3
(1. 湖南工业大学电气与信息工程学院,湖南株洲 412007;2. 通号(长沙)轨道交通控制技术有限公司,长沙 410000;3. 湖南电气职业技术学院,湖南湘潭 411100)
为了减小传统双矢量模型预测转矩控制(MPTC)的计算负担和转矩脉动,提升系统的动态性能,本文提出了一种改进型永磁同步电机双矢量MPTC策略。首先,基于12扇区电压矢量图提出了快速电压矢量选择表,预测时迭代次数只需3次。其次,依据转矩脉动最小原则,预先优化候选双矢量的作用时间。最后,设计了由线性自抗扰控制(LADRC)的动态权重系数,提升了系统的动态性能。仿真表明,所提控制策略具有可行性和有效性。
永磁同步电机 模型预测转矩控制 双矢量 权重系数 仿真验证
0 引言
近年来,为了实现永磁同步电机(PMSM)的高性能控制,有限集模型预测转矩控制(model predictive torque control, MPTC)以其动态响应快、易于非线性处理等优点成为研究的热点[1]。
针对最优占空比控制第二电压矢量总是零矢量的问题,文献[2]中将第二电压矢量扩展到任意基本电压矢量,扩大了电压矢量的选择范围,但是寻优过程迭代次数多,对硬件设备要求高。文献[3]提出新型磁滞控制器,并将电压矢量图划分为12个扇区,有效减小了计算量。文献[4]通过扇区划分,快速选择一个有效电压矢量且只需预测一次,由于排除的电压矢量过多,所选电压矢量组合可能并不是最优组合。在减少计算量方面分扇区法在有着较大的优势,本文将在分扇区基础上提出电压矢量选择表。
文献[5]引入了在线参数辨识环节,不断在线更新预测模型,在参数失配时控制精度有着提升。文献[6]基于扰动观测的方法,对参数误差及内外扰动进行观测补偿。文献[5-6] 都通过提高预测参数的准确性来提升控制性能,但算法设计都过于复杂,并且有可能需要额外的误差补偿。另外,价值函数也是决定控制性能的好坏之一[7],而对于MPTC来说,权重系数是影响控制性能十分重要的参数。
针对传统双矢量MPTC(Conventional Dual-Vector MPTC, CDV-MPTC)存在的问题,本文提出了一种改进型双矢量MPTC(Improve Dual-Vector MPTC, IDV-MPTC)策略,其中快速电压矢量选择表可快速选出3个候选预测双矢量组合。相比CDV-MPTC,IDV-MPTC迭代次数从14次减少到3次,迭代次数大大减小,节省了系统响应时间。由于权重系数的大小反映着转矩和磁链之间的协调程度,也会影响着系统的性能,本文设计了由线性自抗扰控制(Linear Active Disturbance Rejection Control,LADRC)动态调节的权重系数,从而改善了电机的转矩动态性能。
1 表贴式PMSM数学模型
PMSM在同步旋转坐标系()下的定子电压方程和磁链方程分别为
(2)
其中,u、u、i、i、ψ、ψ分别为定子电压、电流、磁链的直轴和交轴分量;ψ为永磁体磁链;ωe为转子电角速度;为定子电阻。
(2)式代入(1)式,可得定子电压方程为
对于表贴式PMSM,轴电感相等,即L=L=L,电磁转矩方程可以写为
(4)
其中,n为PMSM的极对数。
对式(1)用欧拉法离散,可得离散预测模型为
(6)
(7)
三相两电平电压型变换器通过控制上下桥臂开关管的导通与关断,可以产生八个基本电压矢量(共七种),其中六个有效矢量,另外两个是零矢量。
式中(=0~7)表示基本电压矢量,V为直流侧的母线电压,S,S,S是三相逆变器上下桥臂的开关状态。
2 改进型双矢量模型预测转矩控制
本文所提出的IDV-MPTC策略,先基于快速电压矢量选择表快速选出3个候选双矢量组合,再利用转矩脉动最小原理,计算每个候选双矢量最优作用时间,最后使价值函数最小的双矢量组合作为最优电压矢量组合。
2.1 电压矢量组合的选择
CDV-MPTC需要14次的预测,而本文所提方法只需进行3次预测。为了提高控制精度,降低电流谐波,本文将电压矢量扇区图划分为12个扇区,每个扇区所占角度都为30°,扇区划分满足式(10),如图1所示,S(=1,2,…,12)为扇区符号。0(000)和13(111)两个零矢量对转矩的控制效果一样,本文将统一称为零矢量0。
图1 扇区分布图及其对转矩和定子磁链影响的实例
(=1,3,…,11)为6个有效矢量,将相邻的有效矢量进行两两组合,产生了6个虚拟矢量,包括2(1,3)、4(3,5)、6(5,7)、8(7,9)、10(9,11)、12(11,1),如图1所示。每个虚拟矢量与有效矢量之间的组合关系满足

(12)
定义转矩误差Δe和定子磁链误差Δψ
Δe≥ 0,则需要增加转矩,Δψ≥ 0,则需要增加定子磁链幅值。同理,Δe< 0,需要减小转矩,Δψ< 0,需要减小定子磁链幅值。
由直接转矩控制的开关切换表原理可知,根据电压矢量与磁链矢量的夹角范围,可将12个电压矢量按照对转矩和磁链的影响分为四类:增大转矩和增大定子磁链、增大转矩和减小定子磁链、减小转矩和增大定子磁链、减小转矩和减小定子磁链。由于在6个有效矢量的基础上引入了6个虚拟矢量,对转矩和磁链的影响每一类都有3个有效矢量或者虚拟矢量满足要求,以扇区S1为例,如图2所示。
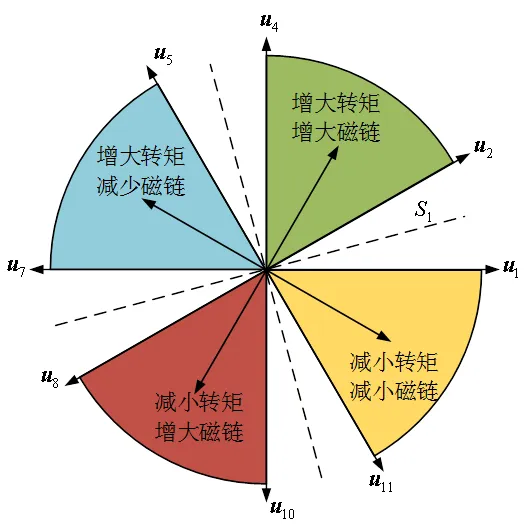
图2 S1扇区电压矢量的分类
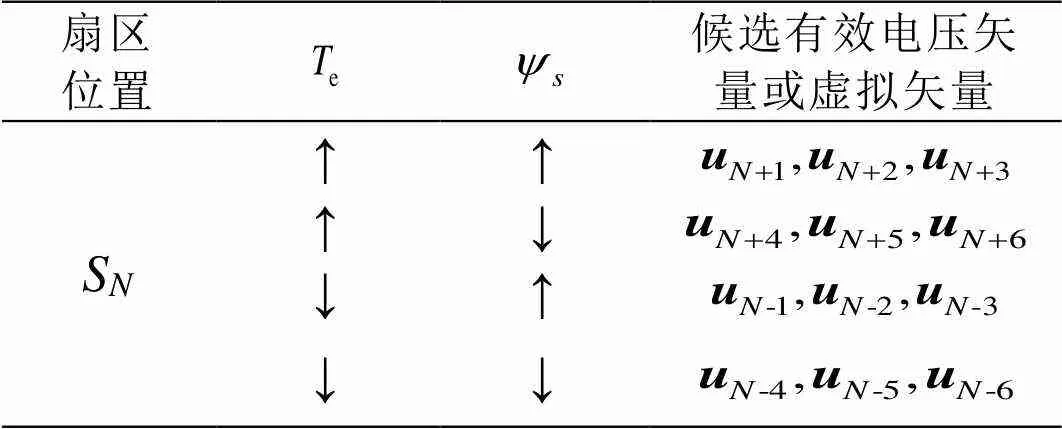
表1 快速电压矢量选择表
如图1所示,图1为扇区分布图及对转矩和定子磁链影响的实例。假设定子磁链所在扇区为S2,并且需要增大转矩和磁链,根据快速电压矢量选择表可知, 3个候选电压矢量组合为(30)、4(3,5)、(5,0)。零矢量将根据开关切换次数最少原则选取。定子磁链转动到其他扇区时同理。
2.2 作用时间优化
为了从3个候选双矢量组合中选出最优双矢量组合,预先对每个组合中的两个电压矢量作用时间采用转矩脉动最小原理进行优化分配。
对式(4)求导可得转矩的微分,再结合式(1)、(2)可得电压矢量作用时的转矩斜率为

式中,u(j=0~7)表示不同基本电压矢量的轴电压,零矢量的轴分量为0。
由此可得,七种基本电压矢量的转矩斜率L(=0~7)都可通过式(14)得到。
转矩脉动最小方法具体公式如下:
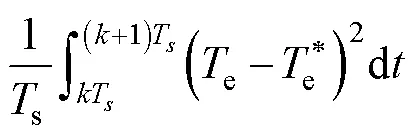
式中e为转矩参考值,式(15)的解趋于最小即转矩脉动最小,可解得每个组合中第一电压矢量最优作用时间opt1。
(16)
式中,1、2为组合中第一和第二电压矢量的转矩斜率。则第二电压矢量的作用时间为T-opt1。
利用电压模型式(17)分别对3个候选电压矢量组合的定子电流i、i进行预测,再将得到的、代入式(6)、(7)、(8),得到3组和,用以后续的价值函数筛选。
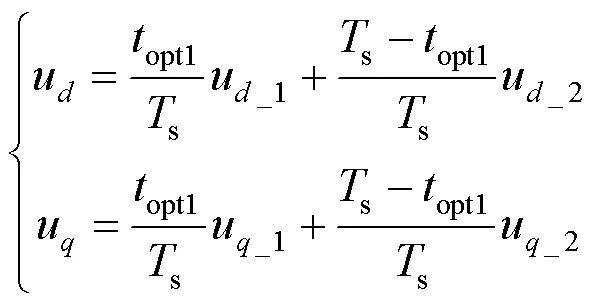
式中,u1、u1为每个双矢量组合中的第一电压矢量轴分量;u2、u2为每个双矢量组合中的第二电压矢量轴分量;零矢量的轴分量为0。
2.3 价值函数的设计
对于MPTC来说,需要设定权重系数去平衡价值函数中转矩和磁链误差之间的关系。而关于权重系数整定和设计目前没有切实的理论依据,但是固定的权重系数,有时不能满足电机的控制需求,比如,电机带载启动时,需要磁链的权重占比相对小一些,突出转矩的重要性。本文在传统价值函数式(18)的基础上采用LADRC控制器动态调节权重系数。

式中,e、ψ分别为转矩和定子磁链参考值;为权重系数,传统算法一般采用经验拼凑。
ADRC具有几乎模型无关性、抗干扰能力强等特点。对于权重系数的设计无具体的研究模型参考等问题,应用ADRC动态调节权重系数,以满足电机不同工况下的控制需求。LADRC使得参数的调整大幅度减小为3个。本文采用一阶LADCR动态调节权重系数,控制算法如下:
假设一阶控制对象模型
(20)
设计线性扩张状态观测器LESO为
控制器设计为
(22)

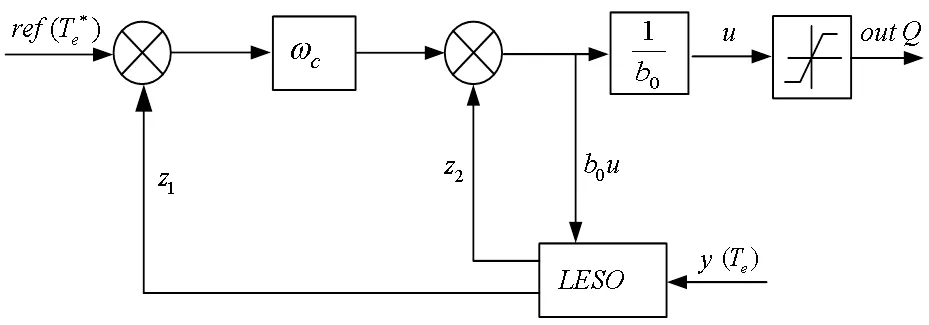
图3 LADRC控制器调节的动态权重系数原理
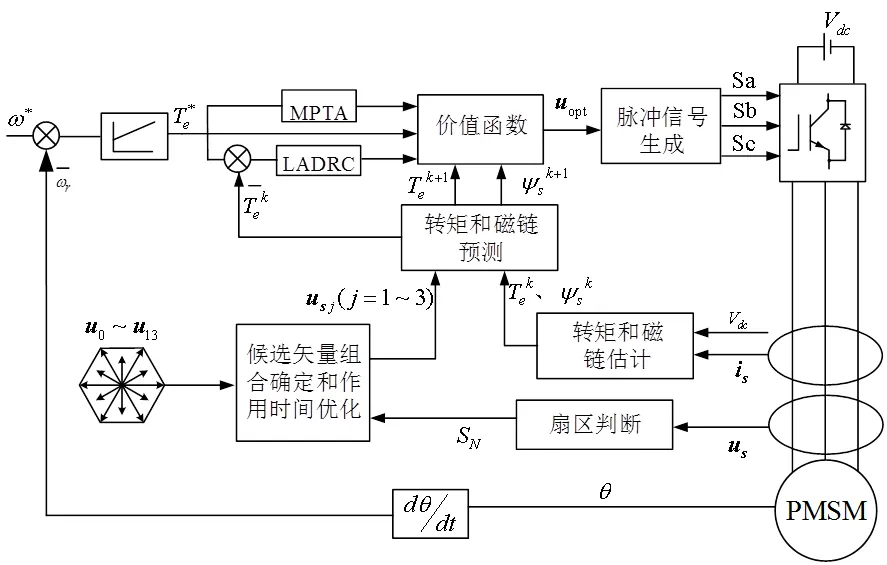
图4 IDV-MPTC结构框图
由于ω、b0和ω三个参数的物理意义比较明确,很容易得到让系统稳定的参数。
图4为IDV-MPTC结构框图。转矩参考值e由PI控制器获得,定子磁链参考值ψ由最大转矩电流比得到
3 仿真验证
为验证所提控制策略的有效性和可行性,对三相表贴式PMSM在MATLAB/Simulink中进行控制仿真验证。表贴式PMSM参数如表2所示。
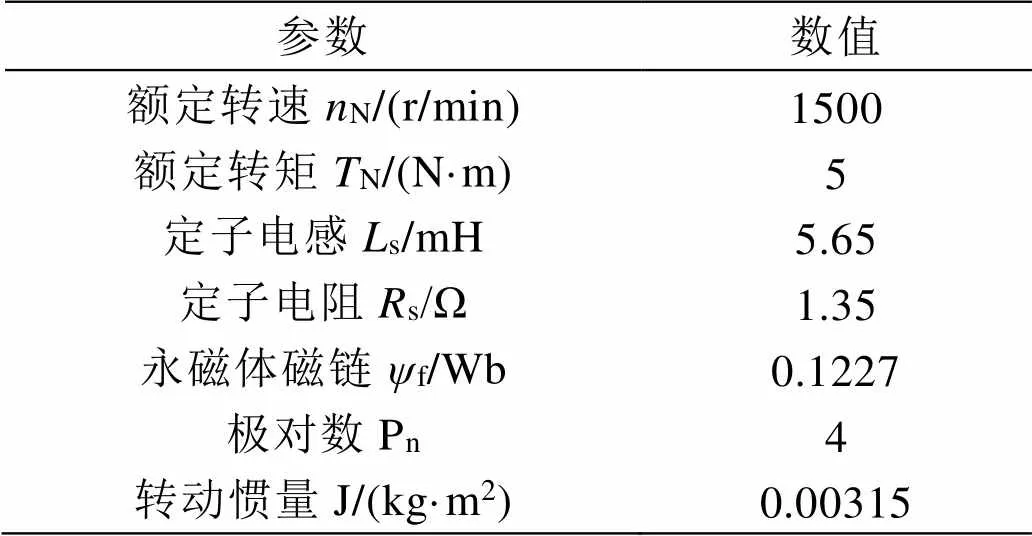
表2 贴式PMSM参数
空载启动,转速至1300 r/min,0.2 s时突加2 N·m的负载,0.25 s时给定转速提升至1500 r/min,并在0.4s卸载。图5为两种控制策略的转速仿真波形,仿真实验发现,两种控制策略具有基本一致的转速动态响应的性能。
图6为两种控制策略稳态转矩性能,局部放大图的横坐标使其0.260 s为0刻度线,刻度增量为0.002s。电机额定转速带载2 N·m启动,在0.25 s时突加2N·m负载,并在0.4 s突降2 N·m。实验结果表明,IDV-MPTC比CDV-MPTC在稳态时的转矩脉动明显减小。详细实验数据如表3所示。
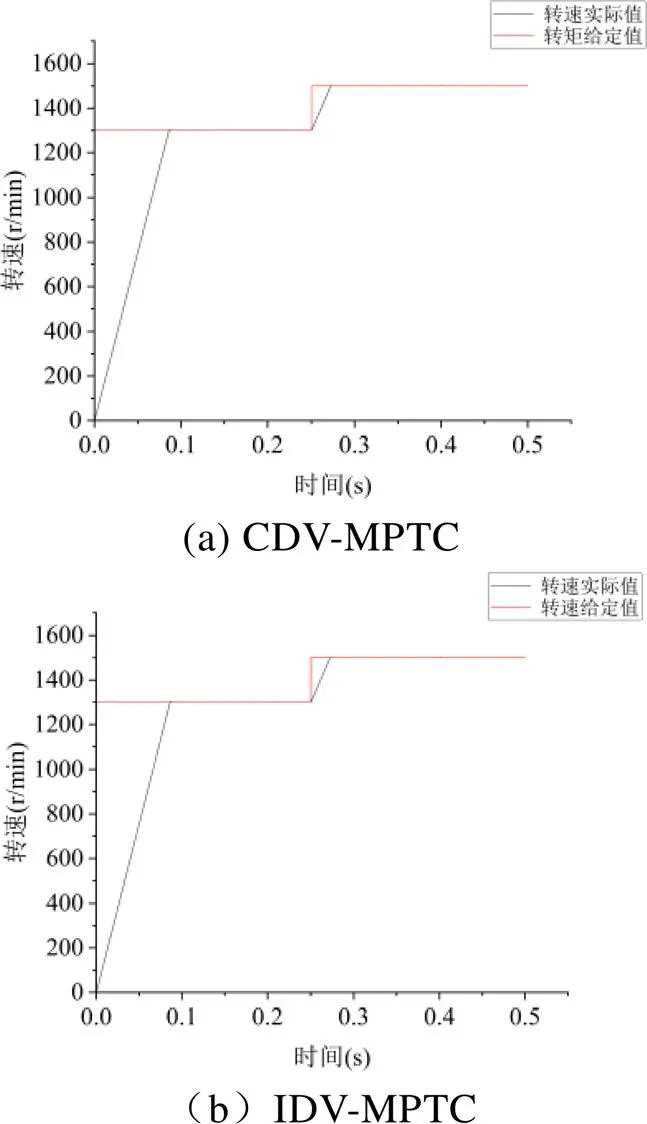
图5 两种控制策略转速性能对比
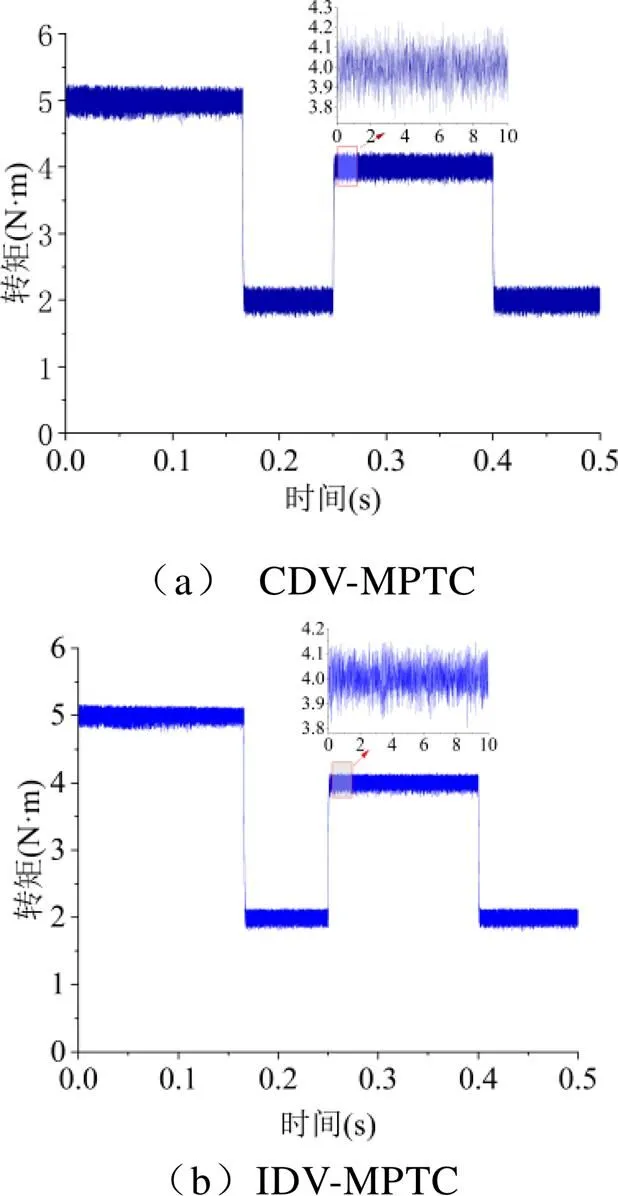
图6 两种控制策略稳态转矩性能

表3 负载转矩突变仿真数据对比
为了验证IDV-MPTC的转矩动态响应性能,设计了3个仿真实验对照,(1)CDV-MPTC,(2)FDV-MPTC为基于快速电压矢量选择表的双矢量MPTC,(3) IDV-MPTC。图7为三种控制策略的转矩响应时间,从图7可以看出,达到额定转矩时所用时间相比CDV-MPTC,FDV-MPTC和IDV-MPTC分别下降了15μs、29μs,IDV-MPTC转矩响应时间下降了10.7%。三种控制策略详细仿真实验数据如表4所示。
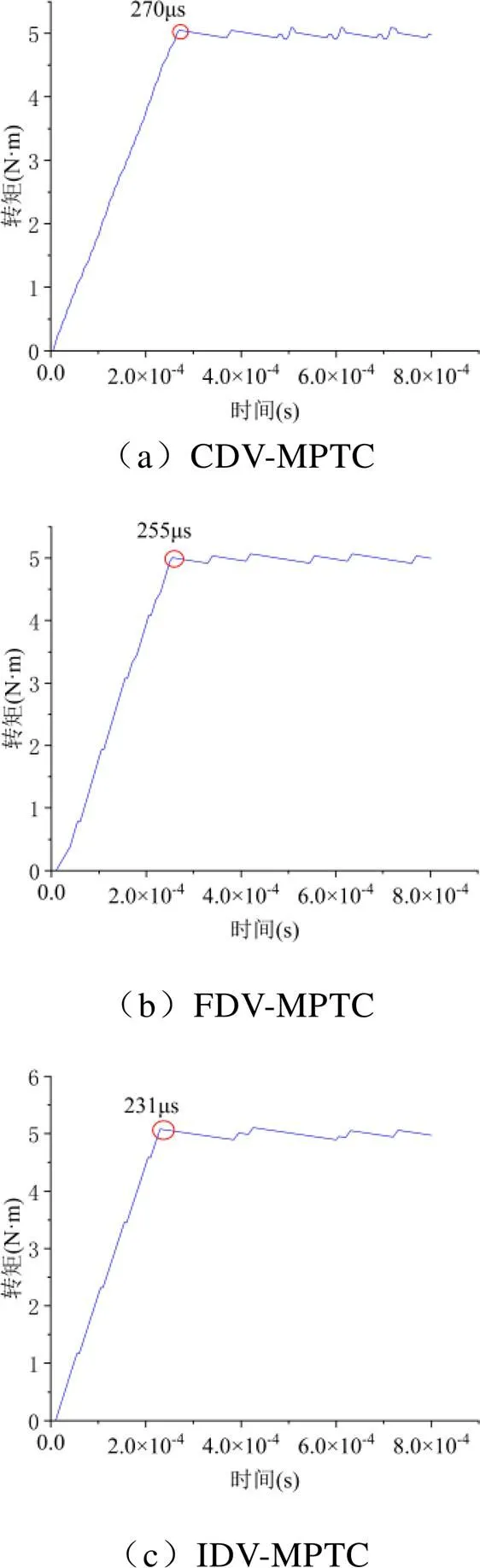
图7 三种控制方法电机启动时转矩响应对比
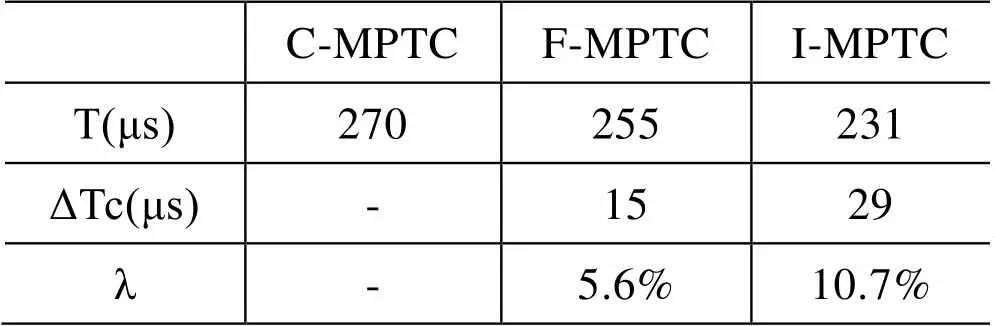
表4 转矩响应时间对比
T为到额定转矩的响应时间,ΔTc为与CDV-MPTC到额定转矩响应时间的差值,λ为ΔTc与CDV-MPTC响应时间T的比值。
4 结论
本文提出的改进型永磁同步电机双矢量MPTC策略,通过快速电压矢量选择表将预测迭代次数从14次减少到3次,降低了计算量,节省了系统响应时间。在价值函数的中引入LADRC控制的动态权重系数,加快了转矩响应速度。通过仿真实验结果可知,相比CDV-MPTC策略,本文提出的IDV-MPTC方法,转矩脉动下降了4.8%,启动响应时间减少了10.7%,证明了所提方法的有效性和可行性。
[1] 宋文祥, 任航, 杨煜,等. 双三相永磁同步电机的双矢量模型预测转矩控制[J]. 电机与控制学报,2022,26(09):97-107.
[2] 徐艳平, 张保程, 周钦. 永磁同步电机双矢量模型预测电流控制[J]. 电工技术学报, 2017, 32(20): 222-230.
[3] Kim, S., J. Park, J. Bae, K. Cho, and D.-H. Lee, “An advanced multiple predictive direct torque control of PMSM using PWM and the 12 sectors,” 2019 IEEE 6th International Conference on Industrial Engineering and Applications (ICIEA), 27–32, 2019.
[4] Zhang Y, Xie W, Li Z, et al. Low-complexity model predictive power control: Double-vector-based approach[J]. IEEE Transactions on Industrial Electronics,2014, 61(11): 5871-5880.
[5] 刘慧博, 黄前柱. 基于模型预测控制的永磁同步电机参数辨识[J]. 微电机,2021,54(09):70-77+100.
[6] 肖会芹, 邓鲸昌, 何静,等. 基于滑模扰动观测器的PMSM增量式模型预测控制[J]. 制造技术与机床,2023,730(04):64-71.
[7] 史婷娜, 杨雨要, 周湛清,等. 基于二次型价值函数的双电机转矩同步系统有限集模型预测控制[J]. 中国电机工程学报, 2019, 39(15): 4531-45.
Dual-vector MPTC strategy for improved permanent magnet synchronous motors
Zhang Cheng1,2, Xie Hao2, Dai Lu3
(1. College of Electrical and Information Engineering, Hunan University of Technology, Hunan Zhuzhou 412007, China; 2. China Railway Signal and Communication (Changsha) Railway Traffic Control Technology Co., Ltd, Hunan Changsha 410000, China;3. Hunan Electrical Vocational and Technical College, Xiangtan 411100, China)
TM341
A
1003-4862(2023)08-0001-06
2023-06-01
张成(1983-),男,高级工程师。研究方向:电力电子系统及其控制技术。E-mail:zcxs417@163.com。
