轨道交通站台门与列车间隙异物的四目定位方法研究
2023-08-21刘伟铭李冠金邱启盛凌光正
刘伟铭,李冠金,汪 良,毛 良,邱启盛,凌光正
(1.华南理工大学土木与交通学院,广州 510640; 2.广东珠三角城际轨道交通有限公司,广州 510308; 3.广东城际铁路运营有限公司,广州 511457)
引言
轨道交通具有快速、经济、便捷、准时等优势,成为居民出行的优选。为保障乘客安全和实现轨道交通公交化,车站在轨行区和站台候车区间安装了站台门,同时留下了一定宽度的间隙,其间常常发生安全事故[1],存在安全隐患。由于列车发车间隔在120~180 s,在站列车关门到发车的时间一般设计较短(15 s以内),如果出现了异物或异物误报事件,站务员难以在短时间完成长130~460 m的站台排查,极易造成列车的大规模延误。因而,设置自动检测站台门与列车间异物及定位系统,将会有效提高处理异物的效率,降低延误时间和减少站务员数量。
对于间隙的探测,已有许多相关的检测算法与系统,原理上可分为:(1)基于红外[2]、激光对射方案;(2)基于激光扫描方案[3];(3)基于机器视觉顶置式方案[4-5]和侧装式方案[6-7]。红外、激光对射的方案原理上无法实现异物定位,且易受震动、折射光干扰,误报率高。激光扫描的方案,可通过飞行时间(TOF)原理测量异物位置[8],但由于探测距离较短(0~15 m[3]),需要多套设备才能覆盖站台,成本较高。且受光束密度的影响,对小异物探测效果较差,存在盲区。机器视觉的顶置式方案,虽然可以测量异物位置和尺寸[4],以及异物分类[9],但设备需要在每扇门进行安置,成本较高。同时受限于安装方式,系统无法在半高门的站台上安装使用。而现有的机器视觉侧装式方案,在地上和地下站台均得到了广泛应用,适用范围较广、成本较低,但如何快速对130~460 m内随机出现的异物进行高精度定位,目前还没有研究出合适的定位方法。
理论上双目可以实现测距,目标物体到摄像头的距离可由视差、焦距和基线通过相似原理求得[10],已在诸多领域中得到应用[11]。但受限于成像质量、标定误差[12]、匹配误差[13]、焦距和基线长度等因素[14],一般的双目系统测距范围多在15 m内,远距离测量(50 m以上)的精度较低。虽然可以通过加大焦距[15]、增大基线距离[16]提高远距离测距精度,但会导致视场角过小,近距离存在较大盲区;并且由于焦距越长景深就越小,无法在所有距离都获得清晰的成像,定焦双目系统的测距范围较窄,远距离时相机标定[17-18]也会存在困难。有学者通过建立新的测距模型,降低了由于焦距[19]、基线[20]带来的误差,但测距范围没有明显改善。有学者通过变焦系统[21]、动态调节基线长度[22]等方法提高双目系统的同步能力和测距范围,但成本高、设备体积较大,难以满足轨道交通限界要求。同时,搜寻物体以及对焦过程耗时较长,难以满足实时检测。
为此,针对上述问题,提出一种地铁、城际和高铁通用的基于机器视觉的四目异物检测与定位装置,并提出一种新的四目定位方法,意图实现远距离、高精度、宽范围的异物定位。
1 四目定位方法研究
1.1 系统安置方式
根据GB 50157—2013《地铁设计规范》和TB 10623—2014《城际铁路设计规范》,地铁直线站台门的滑动门体至车辆轮廓线之间的净距应控制在100~130 mm[23]、城际侧线站控制在0.2 m。将≤0.2 m视作窄间隙站台,通过分别在车头、车尾方向的站台门立柱上设置平行等长的灯带作为背景参考物,并在灯带两端设立摄像头摄向对面灯带,灯带和摄像头外侧不超过瞭望灯带限界,构成一个基于机器视觉的四目异物检测与定位装置,如图1所示。
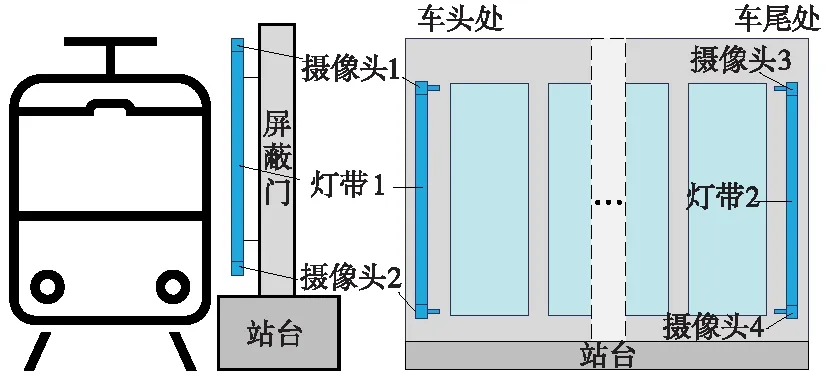
图1 窄间隙站台系统安装示意
而对于城际和高铁,TB 10623—2014《城际铁路设计规范》中未给出明确的正线站台门安装位置标准[24]。站台边缘到站台门的净距一般介于0.2~2 m之间[25],正线站台一般为1.2 m,将>0.2 m视作宽间隙站台。由于高铁城际正线站台的拥挤程度相对较低,其异物事件多遗留于风险空间中,考虑到异物一般会落于地面,故仅对地面进行检测,已经可以满足实际运营要求。考虑隧道风压和限界要求,灯带及摄像头顶部距地面不高于10 cm,设备在地面的安装方式示意如图2所示。

图2 宽间隙站台系统安装示意
1.2 四目测距模型
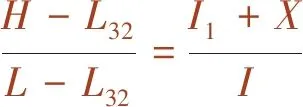
根据上文所述的安装方式,四目测距模型可简化为一个二维模型。同时将异物近似化为平行于灯带的长方形,以减少未知的参数数量。而由于近似点与原坐标点差距在数百米的检测区域中占比极小,对测距精度影响极小。下面以摄像头1为例,对四目定位模型展开说明,当检测区域中异物被摄像头1捕获,且未遮挡灯带两端时,如图3所示。图中字母含义说明如下:I为两侧灯带之间的距离;I1为物体距灯带1的距离;H为物体距灯带底部的高度;X为物体长度;Y为物体宽度;L为灯带长度;Lab为摄像头a所拍摄的灯带被物体遮挡后,灯带指定端点到遮挡处指定端点的长度(a为摄像头编号1~4,b=1时为上端,b=2时为下端)。

图3 摄像头1拍摄物体其中一种情况示意
由图3可知,根据中心投影原理,摄像头的视线越过物体至对侧灯带构建出两对相似三角形,Δabe~Δcde,则有de/be=cd/ab,同时有Δabh~Δfgh,则有gh/bh=fg/ab,则摄像头1可获得的方程式如下
(1)

(2)
此处,将其定义为定位信息方程式。其中,灯带长度L、两侧灯带之间的距离I为已知信息,可通过测量现场情况得到,而Lab可以根据摄像头拍摄的图像测量灯带剩余长度得到。未知参数为I1、H、X、Y四个未知数,需要4个定位信息方程式进行求解。
同理,在图3的情况下,摄像头2也可根据相似原理获得2条定位信息方程式

(3)

(4)
联立求解可得其求解公式

(5)

(6)

(7)

(8)
通过测量摄像头拍摄的图像获得L11、L12、L21、L22,代入求解公式即可得到物体的位置信息I1和H、长宽信息X、Y,从而实现异物定位以及异物大小估计。
当异物存在其他位置时,可根据4台摄像机测得的Lab判断异物的情况,调用相应的求解公式进行求解。下面给出其他摄像头定位信息方程式。
摄像头3

(9)
(10)
摄像头4

(11)

(12)
由于本方法通过4个摄像头对检测区域进行双冗余检测,当物体出现在检测区域,且未完全遮掩所有灯带时,至少有2个摄像头可捕获到物体,并根据相似原理至少可获得2条定位信息方程,至多4条。由于上述模型有4个未知数,部分情况无法求解。为此,基于简化消元思想,可通过忽略远小于站台长度的物体大小X、并在求解物体上顶点位置坐标时,将参数H和Y视作单个参数进行计算,利用获得的2条方程至少可求解物体上顶点坐标(I1,H+Y)或下顶点坐标(I1,H)中的其中一项,从而实现无盲区单异物定位。
1.3 投影值的测量
Lab的精确测量是准确测距的前提。对已知灯带的长度进行准确标定相对容易,测距误差不随检测距离明显变化,并且可通过配置大焦距的镜头,使灯带占据更多的像素点,降低Lab的测量误差,从而提升测距精度。下面给出一种基于连通域的Lab测量方法。
(1)灯带模板检测
在检测区间无异物时,从摄像头中获取源图像进行图像预处理以及图像分割,得到灯带所处区域清晰、无干扰的二值化图片,如图4所示。进行连通域分析,取最长连通域作为灯带模板,获得灯带模板连通域外轮廓矩形的长度wmod、高度hmod、起点坐标(xstart,ystart)和终点坐标(xend,yend)。

图4 灯带模板二值图
(2)异物探测方法
检测时对摄像头图像以同样的预处理步骤得到灯带区域的二值图进行连通域分析,其中可获得连通域数量n及所有连通域外轮廓矩形的长度wi、高度hi、起点坐标(xi_start,yi_start)和终点坐标(xi_end,yi_end),其中i∈[1,n]。由于灯带被遮挡时,灯带的长度会变短,而当异物未遮挡灯带两端时,灯带会被遮挡成多段区域,可通过长度和连通域数量进行判断如下
wi_max=arg max(w0,w1,…,wi)
(13)

式中,wi_max为灯带的矩形区域中最长连通域的长度;wt为长度判断阈值。
(3)Lab测量方法
检测区间判断存在异物时,则继续逐一与灯带模板信息进行条件判断,筛选出属于Lab的灯带连通域,并将其像数长度转换成现实长度
cf=wreal/wwod
(15)
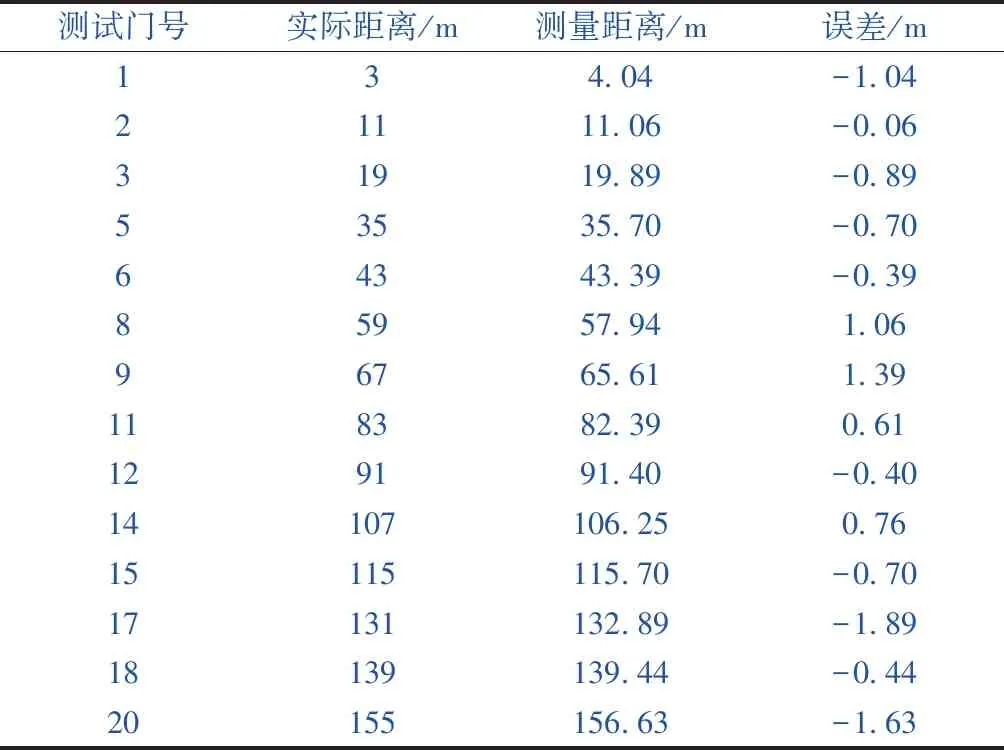
if(|xi_start-xstart| (16) if(|xi_end-xend| (17) 式中,wreal为灯带的现实长度(已知值);cf为像素点到现实的转换系数;xp为预设的偏移阈值;a为摄像头编号1~4,测量示例如图5所示。 图5 存在异物时摄像头处理二值图 为验证本文方法,选择在广东地铁、城际站台进行实地测试,城际宽站台相机顶部距地高度6 cm,地铁窄站台相机外侧距站台滑动门门框3 cm,拍摄距离约180 m处1.1 m灯带图像中灯带长度方向约占350个像素点,可通过改变焦距和采用高分辨率摄像机,使400 m距离约占300个像素点。设备包括相机以及灯带,其外形如图6所示。 图6 设备外形 实验场地包含地铁、城际地下站台及城际户外站台,异物实际放置距离由现场测量得到,实验的具体条件及结果如表1所示。 表1 异物定位测试结果 由表1可知,定位算法在低干扰情况下(实验2),14次异物定位的平均误差仅0.854 m,最大误差仅1.887 m,平均误差仅占测距范围的0.49%。而传统双目方法中,化春键等[26]在5~20 m测距误差为0.126 m到0.998 m,平均相对误差达3.52%;罗珺[27]实现了30~90 m的双目测距,测距误差从1.2 m升至6.9 m,误差明显增长;刘诗婷等[21]通过变焦超分辨率的方法,在9.333 m时误差0.378 m,相对误差4.05%,在167 m时误差为3.335 m,且远距离时更换了镜头;刘畅[28]的双目系统白天在177.4 m时测距误差为4.24 m,而晚上在100 m时测距误差为3.3 m;DENG[29]利用相机+GPS+惯性测量单元实现了远距离测距,在距离200 m时误差35 m,距离500 m时误差87 m,总体误差17%。可见,传统双目远距离测距的误差随着目标距离增长显著增加,在相同距离下测距精度普遍低于本文方法,一些近距离测距的平均相对误差也不及本文方法。实验结果表明,本文方法在远距离测距时的测量精度得到了提升。 根据表2城际宽间隙地下站台(实验2)测距详细数据可知,系统的检测误差与检测距离无明显关联,测距范围可覆盖0~174 m,精度较高,拥有较宽的测距范围,已达到工程应用水平。 表2 实验2定位详细数据 在实验3中,由于列车在站时存在强气流扰动,像素点会出现一定程度的飘移,导致Lab的测量存在一定偏差,本文取多帧图像测量Lab均值以降低误差,11次测试平均误差为3.26 m,仍优于部分未考虑干扰的同距离下的传统双目测距系统。在强气流干扰下仍然可以实现较高精度的远距离测距,体现了其稳定性与抗干扰能力。 实验4~实验6为3个不同宽度(5,7.5,20 cm)的测试物体,分别依次放置在18个测试门检测区域的上、中、下3个位置,如图7所示。根据结果可知,异物宽度对测距误差无明显关系。图8为实验5前9项定位误差数据,由图8可知,异物在检测区域放置的位置不同,测量结果稍有波动但无明显关联。 图7 实验4~实验6测试物体与测试位置 图8 实验5前9项定位误差数据 表3为双目定位和本文定位方法在0~460 m测距范围下的对比,由表可知,本文方法相较传统双目定位方法,无需复杂的光学变焦系统和调整相机间基线距离就可在规定检测区内,实现宽范围(0~460 m)高精度测距,且在成本、体积、实时性上具有突出优势,缺点是需要预设背景参考物,以及仅能实现单个物体测距。但由于异物风险发生概率较低[30],难以同时出现2个及以上异物风险,单个异物的检测可以满足大部分的应用需求。 表3 距离0~460 m范围内定位方法比较 实验5部分测试情况如图9所示,其中,上图为异物放置现场图,下图为操作端输出图像,图像左侧从左到右依次为摄像头1~4所拍摄的灯带图像,图像右侧的输出结果为计算得到的异物所处位置的车门号,方便定点排查。其中,图9(a)为7.5 cm异物放置6号门,正确输出;图9(b)为7.5 cm异物放置11号门,正确输出。 图9 异物现场及操作端图像 针对轨道交通站台与列车门间隙的异物定位问题,提出了基于机器视觉的四目异物检测与定位方法,实现了远距离、宽检测范围的异物检测及单异物高精度定位。该方法通过预设背景参考物,降低了对环境光的依赖以及图像配准难度。通过将三角测距模型外置,提高了远距离测距精度。通过将测量对象从传统双目中独立的像素点,转换成对整个灯带的剩余长度测量,降低了对相机标定的依赖,提高了测距的稳定性、抗干扰性,为实现气流扰动下的准确测量提供了基础。通过四目相互提供定位信息,实现了无盲区定位,拓宽了系统的测距范围。该方法所需装置对处理单元、相机要求较低,系统成本低、易实现。实验证明,本文方法在超大超长距离(宽1.1 m,长0~460 m范围内)定位上有独到的优势,且成功落地到广东省城际铁路站台实际工程应用中,在特殊应用场景如地铁、城际站台存在很高的应用价值及现实意义,同时为传统双目测距提供了一个全新的实现思路。 后续研究将在以下2个方面进行改进与提高:①研究针对户外站台复杂环境光变化的灯带提取算法;②研究列车在站时气流干扰对灯带长度测量的影响及消扰方法。
2 实验方法及结果分析





3 结语