基于虚拟编组技术的列车运行状态转换方案研究
2023-08-21肖李蔚宁付昌友沈晓鹏杨丽娟
肖李蔚宁,柏 赟,付昌友,沈晓鹏,杨丽娟
(1.北京交通大学综合交通运输大数据应用技术交通运输行业重点实验室,北京 100044; 2.中铁工程设计咨询集团有限公司,北京 100055)
引言
近年来,欧洲“Shift2Rail(构建未来铁路系统联合行动计划)”项目将虚拟编组技术(Virtual Coupling Technology)作为欧洲客运铁路的未来发展方向之一[1]。其思想起源于道路交通中的车辆追踪,当后行车辆追踪前方车辆运行时,后车驾驶员可以根据前车的刹车灯提示做出制动操作,此时前后车辆间处于一种相对制动模式,车辆间隔距离极小[2]。虚拟编组场景下,处于同一虚拟耦合编队中的各相邻列车将基于车车通信建立逻辑连接,相互传递各自的速度、位置等信息,保持同步的加速减速。这项技术与传统的列车控制方式相比,突破了闭塞制式的限制,可以极大地缩短列车间的追踪间隔,提高线路运输能力,并且车底运用更加灵活,对客流的适应性更强[3]。
现阶段对于虚拟编组技术的研究尚处于初步探索阶段[4]。GOIKOETXEA[5]提出基于无线通信的虚拟编组技术可使多列车间建立逻辑联系,到达类似物理车钩连接的效果,从而解决因车辆型号不同列车间无法编组的问题,并对实现虚拟编组的关键技术难点进行论述。SCHUMANN[6]基于虚拟编组技术利用仿真工具DFSimu对东京—大阪区段进行模拟,结果显示,区段输送能力将从15000人次/h增加到23000人次/h。荀径[7]构建了面向虚拟编组技术的列车车站追踪模型,并将该模型与传统追踪模式进行对比,结果表明,虚拟编组车站追踪模型能够有效提高车站的通过能力。WANG[8]对固定编组和虚拟编组下的列车运输组织和技术特征进行分析,以城市轨道交通、市郊铁路为研究对象,面向虚拟编组技术提出了一种平行运行图的线路通过能力计算方法。白佳薇[9]提出了基于虚拟编组技术的快慢车运输组织策略,并与站站停、传统快慢车模式下的列车开行方案进行对比,验证了虚拟编组的技术优势。
本文首先对虚拟编组相关概念进行总结,对比该技术与传统列控和编组方式的不同。其次,基于虚拟编组场景下列车耦合和解耦过程,设计了一种虚拟编组列车运行状态转换方案。最后,通过仿真验证了虚拟编组技术相对传统闭塞方式可显著缩短列车间隔,提升线路能力。
1 虚拟编组技术介绍
1.1 虚拟编组的基本概念
虚拟编组是通过协同控制使多个列车形成一个协同逻辑整体,并以编队方式在轨道上追踪运行的列控技术[10]。处于虚拟编组控车下的列车编队,称为虚拟耦合编队。同一虚拟耦合编队中由多个单元列车组成。其中,头车对编队进行管理,发送控车指令给编队内其他后行列车,将编队中的头车定义为领航列车,一般情况下同一虚拟耦合编队仅包含一个领航列车;编队内除领航列车外的其他后行列车定义为跟随列车,跟随列车收到领航列车的控车命令,按控车命令进行控车,跟随领航列车运行[11],如图1所示。

图1 虚拟编组列车运行示意
1.2 虚拟编组技术与传统行车组织方式的区别
虚拟编组需要建立在高级别的自动驾驶技术之上[12],列车间基于车车通信,使后车以高精度的测速定位手段获取前车的运行状态[13],从而控制后车运行实现更加灵活高效的列车耦合和解耦。本节将从列车控制和编组计划两个层面,对比虚拟编组技术与传统方式的不同。
(1)列车运行控制方面
不同闭塞制式下的列车追踪间隔,如图2所示。固定闭塞制式下,后车移动授权(MA)终点为前车所占闭塞分区的起点,这使得列车间追踪间隔较大,影响了线路的运输效率;移动闭塞制式下,通过车地间的不间断通信,控制中心根据列车实际的速度和位置、线路状态等信息进行安全制动计算,并发送MA至车载设备。车载设备进行实时监督,当列车运行速度超过紧急制动触发速度时立即采取紧急制动,从而保证列车在MA范围内安全停车[14]。此时MA终点在最不利的情况下不能越过前车尾部,这是一种绝对制动,列车B的目标速度vB=0;与只考虑前行列车的位置,不考虑其速度信息的绝对制动模式不同。虚拟编组场景下,相邻列车间基于车车通信可以不断交换各自的速度、位置、线路状况等信息。这使后车能够以相对制动的控车策略和前车保持在一定距离范围内协同运行,列车间隔不再是基于前车静止而是基于两车相对速度和位置,此时列车B目标速度vB=vA。显然虚拟编组下列车间的追踪间隔可以得到明显减小[15]。
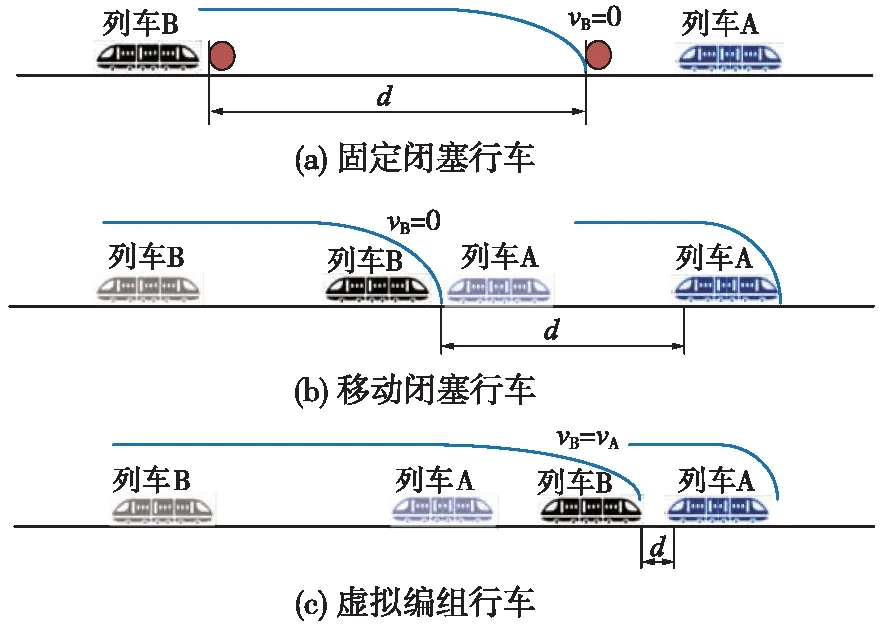
图2 三种列车控制方式追踪间隔对比
(2)列车编组计划方面
从列车编组方案角度来看,虚拟编组可以实现灵活高效的列车耦合和解耦,其作为一种前沿的列车动态编组技术,将对未来地铁列车运行计划编制产生深远影响。
传统的列车编组方案包括多编组和可变编组,如图3所示。多编组是指针对线路在不同时段具有的不同客流特征,按照大编组、小编组或是大小编组混跑方式组织运营的一种列车开行方案。可变编组可实现列车运营途中调整编组,使行车密度视客流量需求变化。虽然可变编组技术灵活,但列车仍需通过物理连接来实现,这种技术的缺点是作业时间较长,且对车站条件、设备要求较高[16]。虚拟耦合编队中各单元列车间通过虚拟车钩的方式连接,又称逻辑连接。在列车编队运行过程中,根据线路在不同时段、不同区段的客流差异,灵活地改变编队中列车数量,更好地匹配不同区段、不同时间的客流需求,表1为不同列车编组方案组织特点和适用范围[17]。

表1 不同列车编组方案的组织特点和适用范围
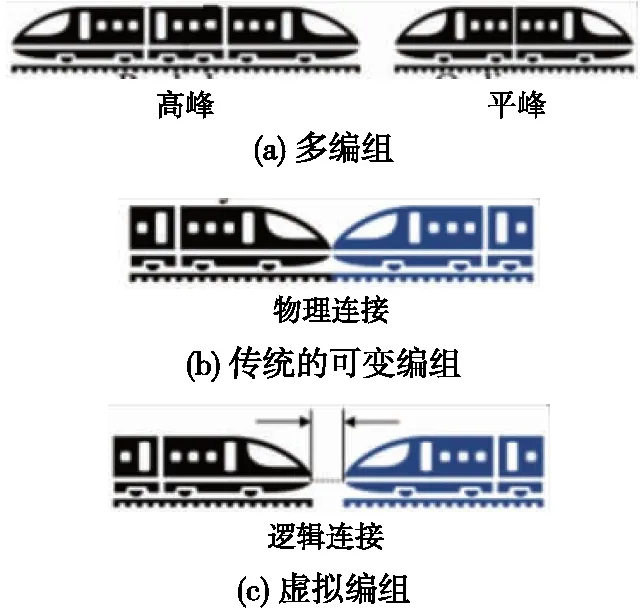
图3 不同列车编组方案概况
2 列车耦合和解耦过程分析
列车耦合和解耦是实现虚拟编组的关键技术问题,以两列车的区间耦合和解耦为研究对象,展开描述列车耦合和解耦过程。为方便表述,将领航列车简称为“前车”,跟随列车简称为“后车”。
2.1 列车耦合过程
满足虚拟编组功能的CBTC系统中,列车自动监控系统(ATS)负责监督管理列车耦合功能,具体功能包括列车耦合计划的制定、虚拟耦合编队的管理、耦合区域的选择,实现过程如图4所示。

图4 列车耦合过程
Step1:ATS设备向区域控制器(ZC)发送列车耦合计划,具体包括耦合区域的起止点、待耦合列车的前后关系、列车ID等信息。ZC为前车计算移动授权(MA),并发送预告信号给前车的ATP车载设备,当车载设备给出确认回应,ZC再将耦合计划信息发送到车载设备。
Step2:当收到耦合信息时,前车车载ATP持续监测耦合编队的完整性,确定是否完成列车耦合,编队完整性检查基于车车通信实现。若完成耦合,后车将发送耦合完成的标志信息。
Step3:当后车接近前车时,ZC给后车发送耦合区域的起止点、前车ID等信息,后车车载ATP也时刻检查与前车是否完成列车耦合。
Step4:后车通过车车通信向前车注册信息,前车收到信息后返回注册请求,之后两列车向ZC返回注册成功结果。完成注册后,列车的车车通信设备完成连接。至此,两列车可将各自的速度、位置和速度曲线数据通过车车通信发送给对方。
Step5:在车车通信建立完成后,ZC将不再为后车提供移动授权。后车的车载虚拟编组控制模块根据前车数据和线路数据为本车计算控制策略,控制列车完成耦合任务。
Step6:当前车运行到耦合区域终点时,后车检查其与前车的速度差和间隔,只有列车速度差、追踪间隔在规定阈值范围时才认定为完成耦合。
综上可以发现,列车耦合的关键在于车车通信建立后,后车对于前车的追踪。由于在列车耦合过程中前车按照既定的行车曲线运行,因此列车耦合本质上为一个已知前车速度曲线的列车追踪问题。从运营的角度来看,由于区间距离和最高限速的约束,耦合过程中后车的运行速度不能超过区间限速,且理论上耦合所需的最小区间距离不能超过区间的站间距。理想情况下,推荐后车采用“最大牵引-巡航-最大制动”节时操纵策略进行追踪耦合。
2.2 列车解耦过程
列车完成耦合后处于虚拟耦合编队状态,列车共享同一段运行区间协同运行。当耦合编队接近收到解耦指令时需进行列车解耦作业。列车解耦的具体实现过程如图5所示。

图5 列车解耦过程
Step1:当前车的移动授权与解耦区域重叠时,ZC发送预告信息给前车车载设备,前车回应后,ZC会将解耦信息再次发送至车载设备。
Step2:ZC提供移动授权和既定的速度曲线信息给前车车载ATP,前车在解耦区域内按照曲线行车,后车的虚拟编组控制模块生成速度曲线,保证后车运行速度小于前车。
Step3:前后列车根据各自的速度运行曲线运行,运行过程中后车车载ATP实时监控两车相对速度和追踪间距。
Step4:当前车将要驶出解耦区域时,检查前后列车是否满足断开通信的条件。若满足,前车注销后车的信息,车车通信链接断开,ZC给后车更新MA。若不满足,则前车向ZC申请延长解耦区域,继续执行解耦。
Step5:当前车驶出解耦区域时,后车向ZC报告解耦完成,完成解耦过程。
列车的解耦是耦合的逆过程,与列车耦合类似,前车在既定的速度曲线下行车,后车通过车载控制模块,根据前车速度及位置等信息生成行车曲线,不断增加与前车的追踪间隔,直至满足解耦条件。从运营的角度来看,后车在解耦过程中需降速,这会导致一定的运输能力损失,因此,为保障线路行车效率,后车在解耦过程中,可采用“最大制动-巡航-最大牵引”节时操纵策略运行。
3 虚拟编组列车运行状态转换方案
虚拟编组场景下列车的耦合和解耦需要经历不同运动状态的转换,参考相关研究[18-22],设计了一种虚拟编组列车运行方案框架,将虚拟编组下的列车运行状态分为五类:移动闭塞运行状态、列车耦合状态、虚拟耦合编队状态、意外解耦状态、列车计划解耦状态,如图6所示。

图6 虚拟编组场景下列车运行状态
状态1:初始状态列车在移动闭塞下运行,列车间的追踪间隔需满足绝对制动距离Lm。其中,EoA为移动授权的终点,Sm为安全防护距离,其长度是EoA至列车尾的距离。
状态2:当前后列车需要进行耦合时,后车将从移动闭塞状态过渡到列车耦合运行状态。列车耦合状态下后车需要追踪前车与其协调速度接近vA(|vB-vA|≤thv),thv为速度阈值。追踪过程中前车通过的距离称为协调距离Lc,完成虚拟编队所经历的时间称为协调时间tcoord(Lc=tcoord·vA)。根据前后列车的速度关系列车耦合可分为两种情况,vB
(1)当vB (2)当vB>vA时,后车需减速至与前车相同速度,并调整两列车间距以满足虚拟编队目标距离。 状态3:前后列车耦合完成后,此时两列车进入虚拟耦合编队状态,两列车将以相同的速度加速、减速和制动,耦合编队中列车追踪过程如图7所示。 图7 虚拟耦合编队列车安全追踪示意 处于虚拟耦合编队中列车的速度vk、位置sk可表示为 (2) 式中,vk-1、sk-1、ak-1分别为列车前一步长的速度、位置和加速度;Δt为单步长时间长度。其中,后车前一步长的加速度取值与前车加速度相关,表示为式中,T(vk-1)为后车牵引力取值;M为列车质量;ρ为转动惯量;bmax为列车最大制动率;R为运行阻力,与坡度φ和曲线半径r相关。 (3) 状态4:虚拟耦合编队运行状态下,后车以前车速度曲线作为参考行车,但是由于外界干扰的存在(如坡度变化),列车实际运行曲线可能与参考曲线产生偏差,列车间距会逐渐拉大或缩小。当间距超过阈值ths时,列车进入意外解耦状态,此时列车需要向ZC请求,重新进入状态2开始列车耦合。此外,在耦合编队运行过程中也可能出现因车车通信中断导致的不可控状态场景。该场景下,后车无法获取准确的列车间隔,从而不能计算控制策略。前车应立即向ZC报告本车运行状态,ZC命令后车切换至状态1,并且尝试重新连接。若重新连接成功,后车立即切换至状态2。若重连失败,则立即紧急制动,等待ZC指示。车车通信中断场景下,如何保证列车安全运行也是虚拟编组技术研究的重点问题,未来可作为进一步深化研究的方向。 状态5:当耦合编队收到解耦指令时,后车需要减速增距与前车解除耦合状态,解耦后的列车将继续在移动闭塞下运行。为提高行车效率后车可采用“最大制动-巡航-最大牵引”的操纵策略增加与前车的间隔距离,直至满足移动闭塞下的行车间隔要求。 虚拟编组场景下,各阶段列车的运行状态可以通过牛顿运动公式与时间步长积分获取。当列车处于移动闭塞运行状态、列车耦合状态、意外解耦状态、列车计划解耦状态时,当前列车的速度vk、位置sk可表示为 (4) F(vk-1)与列车运行工况有关,可表示为 (5) 仿真参数设置如下:前后列车最大加减速度均为1 m/s2;通信延迟时间tdelay=0.2 s;安全防护距离Sm=10 m。在不考虑坡道坡度、区间限速以及意外解耦的理想运行条件下进行仿真实验,对比不同追踪模式下列车运行速度对安全间隔的影响,如图8所示。相同运行速度时,虚拟耦合编队中列车的最小安全间隔远小于移动闭塞模式,且随着列车运行速度增加,二者之差会越来越大。当列车运行速度在60 km/h时,耦合编队中列车安全间隔相比传统方式下,缩短了71.7%;当列车运行速度在160 km/h时,安全间隔缩短了86.1%,这也说明虚拟编组技术更加适用列车高速运行场景。 图8 不同追踪模式下运行速度对列车安全间隔的影响 选取0.6~1.4 m/s2作为前后列车制动率取值范围,获取不同列车制动率组合下的耦合编队列车最小安全间隔,如图9所示。 图9 不同制动率组合下耦合编队列车最小安全间隔 固定耦合编队运行速度下,编队中后车相对前车制动率越高,列车最小安全间隔越小。相应地,后车相对前车制动率越小,列车最小安全间隔距离越大。以耦合编队运行速度120 km/h为例,当后车制动率≮1 m/s2,前车制动率≯0.8 m/s2时,编队最小安全间隔理论上可取到安全防护距离,在本研究中为10 m。 此外,在固定的耦合编队运行速度下,前车与后车制动性能相同时,编队中列车最小安全间隔近似恒定。以编队运行速度80 km/h为例,相邻列车无制动性能差异时,最小安全距离为50 m左右,如表2所示。 表2 80 km/h速度下不同列车制动率组合的耦合编队最小安全间隔 m 如若在列车型号相近的城市轨道交通系统内,列车间基本没有制动性能差异,因此,恒定耦合编队运行速度下存在着唯一对应的编队列车最小间隔。 虚拟编组技术基于车车通信协调列车运行的各个阶段,能够有效缩短列车间隔,提升线路能力,实现“空间维度安全、时间维度更近”的高效运营,当前国内外关于虚拟编组技术的研究尚处于起步阶段。本文总结了虚拟编组相对传统列控和编组技术的优势所在,并基于列车耦合和解耦过程,构建了一套虚拟编组列车运行状态转换方案,对不同列车运行状态进行解析,并通过仿真进一步验证了虚拟编组技术相对传统追踪方式的技术优势。





4 实验分析



5 结语