三维激光扫描与倾斜摄影测量技术融合的建模效果研究
2023-08-11郑金玮
郑金玮,孔 琪,董 聪
(1.中交公路规划设计院有限公司北京岩土工程技术分公司,北京100010; 2.湖州市技师学院,浙江 湖州 313200; 3.山东深科空间规划勘查设计有限公司,济南250000)
0 引言
实景三维模型是我国建设领域中必不可少的基础数据之一,能够直观展现出建筑的细节及内容,为工程项目提供可视化支撑。但在对建筑展开测绘时,无论是使用三维激光扫描技术还是使用倾斜摄影测量技术,都有可能存在细节程度低、纹理少、视角存在盲区等问题,影响实景三维模型的还原程度,进而影响工程项目的推进,因此需探究三维激光扫描技术与倾斜摄影测量技术的融合,对实景三维模型进行进一步优化,以满足实际使用的需求。
在诸多扫描技术中,三维激光扫描技术属于非接触式测量技术,具有无需接触的特点,可以在天气条件不理想状态下展开扫描作业,需在不同平台上搭载激光扫描仪,对目标展开面状扫描,通过扫描方式获得目标的三维坐标信息。三维激光扫描技术的信息采集速度较快,能够在短时间内获取大量的激光点云数据,根据点云数据构建三角网,进而生成真实地貌的数字表面模型。激光扫描仪搭载了一个相机,可对地物进行拍摄,利用影像对点云数据进行复色,从而使真实场景可被有效还原。对比其他技术,激光扫描技术具有安全性高、环境适应性强、人员操作简单、数据信息获取效率高等优势,能够有效提升工作效率,对生产质量进行优化,获取到的激光点云数据具备抗干扰能力强、精准度高、密度较高等优势,无论是在文物修复方面还是在数字矿山或电力巡检等领域中都得到了广泛应用[1]。但是三维激光扫描技术也存在一些不足(如视角盲区中扫描数据完整性不足,相机拍摄过程中视角不够完美,导致影像中的纹理存在缺陷等),需进一步展开优化。
倾斜摄影测量技术是测绘工作中的常用技术之一,通过合理利用无人机对目标信息进行采集。无人机上需搭载一个或多个多角度负责采集影像的相机,通过相机对目标的纹理数据及定位信息进行收集,进而有效提升建模效果。对比其他技术,倾斜摄影测量技术具备诸多优势(如成本较低、工作效率较高、视觉效果更加贴近真实、人工干涉较少等),能够大量生产大场景实景三维模型。但是倾斜摄影测量技术同样存在缺陷,如果天气较为恶劣就可能导致数据采集不准确或无人机无法作业等,受到场景、航高、数据处理算法等其他方面因素的影响,可能导致倾斜摄影测量技术作用受到影响。水电工程项目中地形起伏较大,弱纹理为主要的覆盖纹理,可能导致倾斜影像的自动匹配难度提升,影响建模效果[2]。而在大场景当中,建模优化需耗费大量的经济成本及人力成本,无法满足项目生产需求,因此对倾斜摄影测量技术生成的三维建模进行优化尤为重要。倾斜摄影测量技术建模与三维激光扫描技术建模对比见表1。

表1 倾斜摄影测量技术建模与三维激光扫描技术建模对比
1 三维激光扫描技术与倾斜摄影测量技术的关键及融合
1.1 数据采集
在数据准备阶段需做好作业准备,利用三维激光扫描技术及倾斜摄影测量技术展开测量,此过程中,三维激光扫描技术需进行扫描站布设及点云数据收集,对数据进行测量及采集,而倾斜摄影测量技术则需通过纹理图像采集方式对数据进行测量及采集。测量工作结束后,需将测量数据通过外业工作的方式进行检查,如果数据不合格,则重新返回点云数据收集及纹理图像采集阶段,如果数据合格则可展开下一步[3]。数据合格后,将数据导出并进行备份,结束工作。
1.2 三维扫描技术与倾斜摄影测量影像融合建模
如果将三维扫描技术与倾斜摄影测量技术相融合,能够有效提升影像清晰度,降低测量成本与投入,进而提升工作效率。融合的主要方式是将倾斜摄影测量技术获取的影像与三维扫描技术获取的点云数据相结合,通过几何结构将二者融合,获得融合建模。通过合理利用倾斜摄影测量技术展开空三解算,根据影像数据生成点云数据。对激光点云数据进行预处理,将处理过的数据导入到软件平台中。在此过程中应保证点云数据的格式相同,通常采用las格式或e57格式。将两份点云数据进行配准,转换到同一个坐标系中,对融合后的点云数据展开空三解算,待解算完成后,根据融合后的点云数据构建不规则的三角网,对三角网进行细致分割,生成三维白膜。一般情况下,软件会自动获得影像中存在的纹理,并对分辨率进行设置及匀光匀色操作,将纹理映射至白膜上。部分软件会在模型纹理贴图中合理运用赋色点云纹理,达到融合效果。融合建模流程见图2。

图1 建筑点云数据采集流程
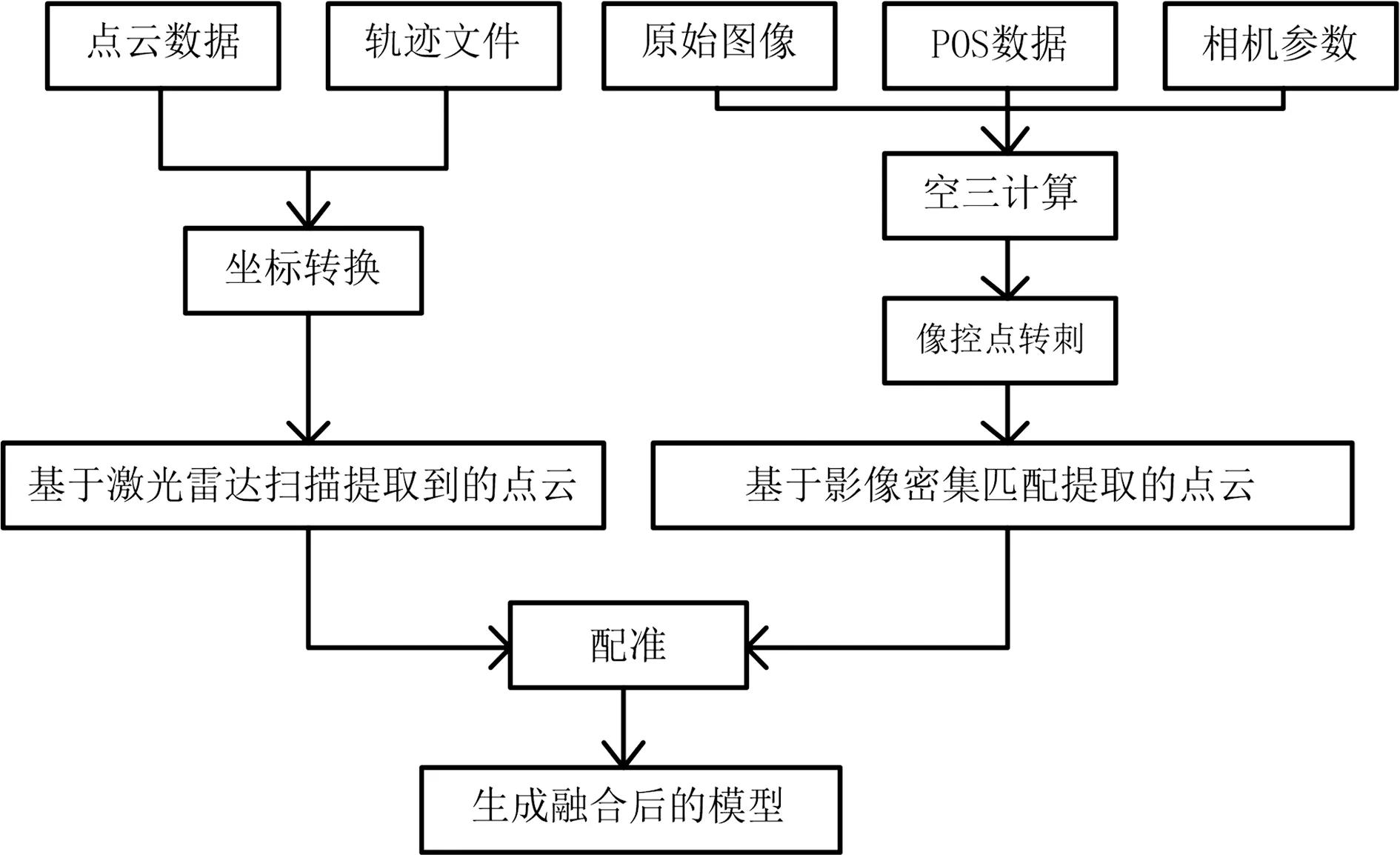
图2 基于激光扫描技术与倾斜摄影融合的建模流程
2 案例分析
将某牌坊作为三维建模对象,展开三维激光扫描技术与倾斜摄影测量技术融合的建模实验,通过架站式三维激光扫描技术对目标点云数据进行获取,合理利用倾斜摄影测量技术对目标影像数据进行采集。此过程中需合理利用架站式激光雷达进行扫描,其工作原理是将激光测距仪与反射棱镜进行组合,构成激光扫描仪器,并将激光扫描仪架设在地面之上,通过匀速旋转扫描的方式发射激光,并接收返回的信号,以此判断距离,根据解算了解车站与扫描站之间的坐标,根据现有坐标对物体表面三维坐标进行解算,最终形成满足需求的激光点云数据。对比其他点云数据,架站式激光点云数据的精度较高,能够有效提升倾斜摄影技术获取影像的清晰度,二者融合可以进一步对现有图像进行优化,满足使用需求。
通过倾斜摄影测量技术,一共拍摄到78张影像,每张影像的尺寸都是最高分辨率,即5472×3648。对于通过三维激光扫描技术获取的激光点云数据,采用徕卡RTC 360作为扫描仪器,保证视角场水平满足360°,扫描范围为0.5~130 m,扫描速度最高可达200万点/s。
2.1 导入数据
需新建工程,在软件中提前输入采集到的影像信息及POS信息,方便后续使用。对影像路径及完整度进行检查,如果没有数据问题,则可展开下一步空三加密操作。
2.2 空三加密
空三加密需创建空三任务,输入空三任务的名称,将影像数据导入其中。对姿态、位置、连接点密度、匹配模式等诸多参数进行设置,再展开空三解算。本次解算并未解算控制点,因此只有连接点参与解算过程。解算后的影像点云成果见图3。

图3 倾斜摄影测量影像空三解算后得到的点云成果
将架站激光扫描仪收获到的点云数据输入其中,形成图4,进入点云配准环节。需要注意的是,输入的点云数据应为las格式或e57格式。
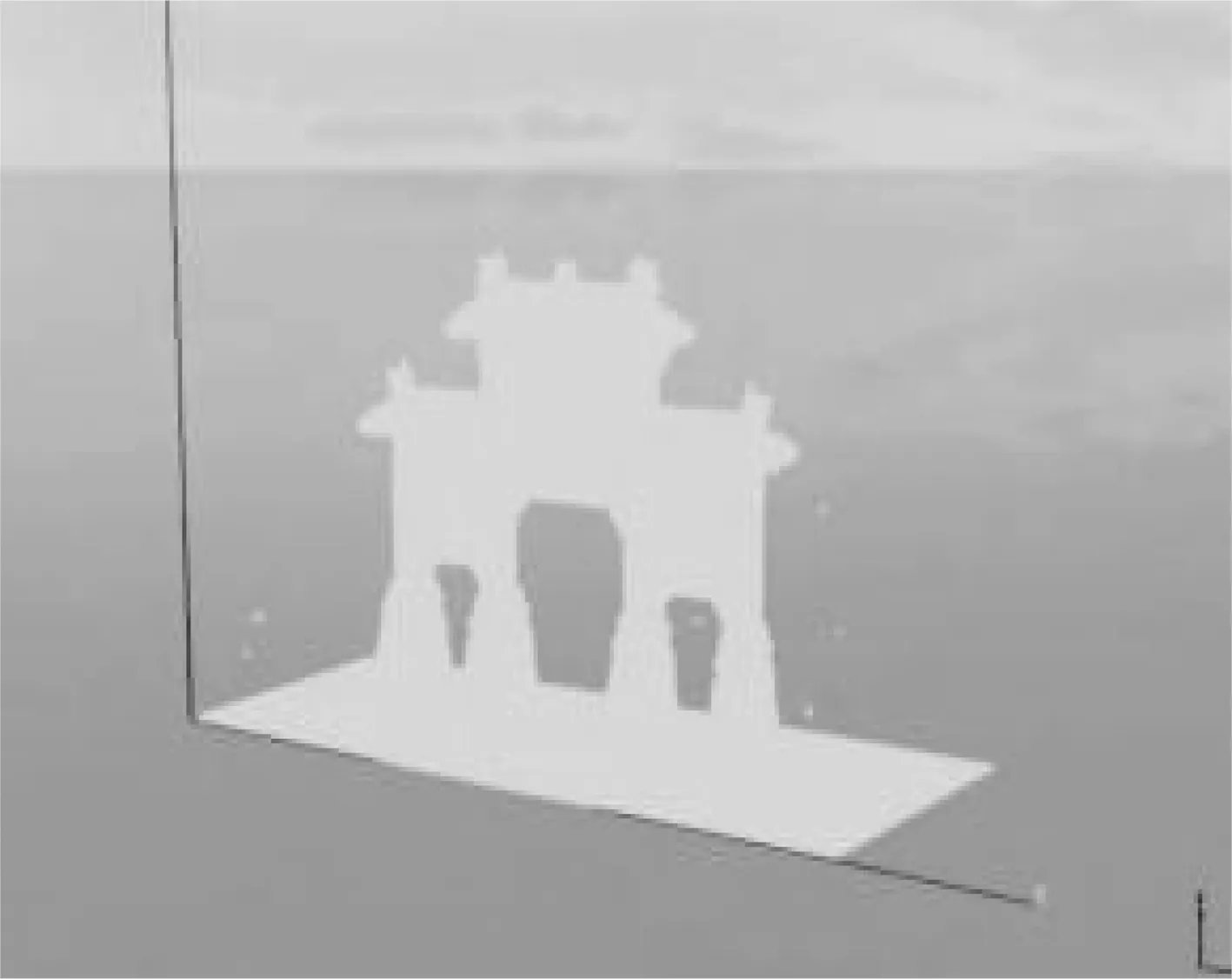
图4 架站式激光扫描获取的点云数据
2.3 点云配准
在点云配准环节,需提取部分激光点云数据特征点的坐标信息,将其导入软件中,在影像点云中展开控制点刺点,提交空三任务,方便展开控制点的平差计算。在此过程当中,合理采用控制点平差计算可对区块内数据进行精准配准,收获图5。点云配准后进行三维模型重建。

图5 融合后得到的点云数据
2.4 三维模型重建
三维模型重建前要提前对融合影像进行判断,查看点云是否存在分层,如果点云不存在分层则可以开展三维重建。要对瓦块大小、发布数据格式、模型坐标系、模型原点等参数进行设置,寻找模型几何来源及图片纹理,将二者融入三维模型中,提交重建任务,对模型进行生产构建,收获图6,完成三维模型重建[4]。

图6 融合激光点云数据与倾斜摄影数据建立的三维模型
3 结束语
在三维模型生产过程中,无论是采用三维激光扫描技术还是倾斜摄影测量技术都可能存在缺陷,需提升建模效果,以满足生产需求。三维激光扫描技术与倾斜摄影测量技术二者具有互补性,将二者相结合可搭建出纹理细致、工作效率高、盲区小、细节进一步提升的三维模型,能够满足生产需求,提升工作效率及建筑测绘的可靠性。