水下航行器能源动力系统建模仿真与实验研究
2023-08-08张剑沈琳
张剑, 沈琳
(1.中国科学院 电工研究所 电力电子与电气驱动重点实验室, 北京 100190;2.中国科学院大学 电子电气与通讯工程学院, 北京 100049;3.齐鲁中科电工先进电磁驱动技术研究院, 山东 济南 250102)
0 引言
以直流区域配电为特征的第二代能源动力系统(EEPS),具有良好的机动性、静音性、布置灵活性以及较低的燃油消耗率[1],已成为未来舰船动力系统的发展方向[2]。舰船的EEPS以电能作为能量形态,在综合运用电力变换、传输等技术的基础上,通过对传统舰船中相对独立的动力和电力两大系统的整合,在满足推进系统高速机动性对电能需求的同时[3],为武器等其他负载提供电力能源,实现了对推进系统、武器系统、辅助设备所需电能的动态分配和优化管理[4],简化了舰船动力系统的结构,实现了更高的功率密度和配置的灵活性,带来了舰船综合性能的大幅提升,EEPS已成为现代电力推进舰船重要的组成部分[5]。
舰船的EEPS构成复杂,其典型的系统配置包括柴油机及其控制器、发电机及控制器、电动机及控制器和螺旋桨推进装置,各个组件间存在复杂的电磁耦合和机电耦合关系,目前还无法得到系统启动加载、负荷切换等动态过程的解析解,因此也无法基于解析法来研究EEPS的上述复杂动态过程。同时,舰船电力系统与陆用大电网相比,系统容量小且孤立,舰船电力系统与陆用大电网存在明显的差异。建立被控对象的数学模型是对航行器EEPS进行特性分析和控制系统设计的基础,通过建立系统的计算机模型并进行仿真,可以完成对系统的稳态、动态过程分析及控制策略优化,从而缩短台架试验及实航验证时间,降低系统的研发周期和成本[6]。
随着以全电力推进为特征的“全电舰船”不断涌现,舰船电力系统建模方面的相关研究逐渐增多,应用的理论与建模方法也越来越多样化。国内外学者针对柴油机建模和仿真进行了大量研究,根据建模原理、复杂程度、应用范围的不同,大致可以分为线性模型[7-9]、非线性模型[10]及系统辨识模型[11]三类,针对不同应用场合有不同复杂度的模型可供选择,在保证建立的柴油机模型与柴油机实物输入输出特性一致性的前提下,如何降低模型复杂度,提高计算速度,达到实时仿真的要求,以及如何设计合理的参数抽取方法都是尚未解决的问题;三相同步电机在中小型船舶中具有广泛的应用前景,国内外针对船用电励磁三相同步电机展开了较多的理论和应用研究,新兴的功率密度更高的永磁同步电机(PMSM)的主磁场由永磁体产生,这与电励磁同步电机在工作机理上存在根本性不同。多年来,PMSM的运行理论基本建立在对时间向量和空间矢量分析的基波分析理论上,在时域中采用连续模型[12-13]对PMSM进行描述是一种较通用的方法,考虑到以数字信号处理器(DSP)为控制核心的变流器系统基于数字化技术,其控制过程是离散化的,为更好地进行变流控制策略与电机本体的匹配设计,建立PMSM的精确的离散化模型具有迫切的需求;在研究螺旋桨动态特性时,将螺旋桨和船体作为一个整体进行建模是一种通用方案[14],“船-桨”建模方法相对比较成熟,建立的模型可以真实地反映螺旋桨的动态过程,虽然模型中相关参数可以通过工程经验进行获取,但是如何评估所获得参数的准确性以及模型与实物系统的对比验证等问题,并未得到完全的解决。
基于上述分析可知,国内外学者针对EEPS各关键组件的建模方法很多,但是如何平衡各组件模型复杂度和精确度的关系,在此基础上获得满足实时仿真需求的实用模型的方法并不完善。同时,基于各组件模型构建的系统仿真模型与EEPS实物系统的对比验证工作进行得并不充分。
本文以某中型水下航行器EEPS为研究对象,在对其关键组件进行运行机理分析和数学建模的基础上,搭建包括柴油机、PMSM、变流器和螺旋桨等组件的EEPS一体化仿真平台,开展EEPS系统级仿真工作,并与搭载真实EEPS系统的航行器地面实验及实航海试的实验结果进行详细的对比与分析,验证所构建的仿真平台与EEPS实物系统动静态性能的一致性。
1 航行器EEPS特性分析及数学建模
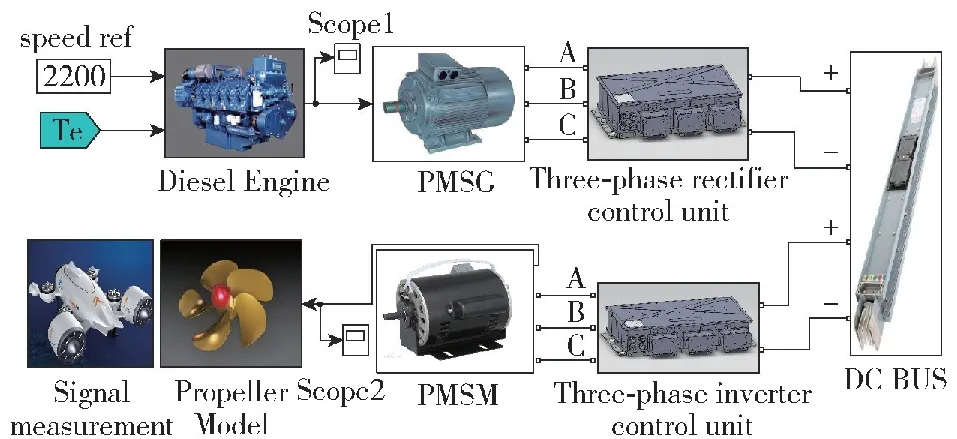
图1所示为一种基于直流区域配电架构的水下航行器EEPS的结构示意图。EEPS主要由前级发电子系统和后级电推进子系统组成,采用的是较为典型的“交-直-交”级联型拓扑、直流区域配电架构。柴油机作为原动机通过连轴装置与PMSM进行机械连接,产生的电能经整流器整流后接入汇流排,供后级电推进子系统及其他船载用电设备使用,电推进子系统推动螺旋桨旋转,为航行器行进提供驱动力。
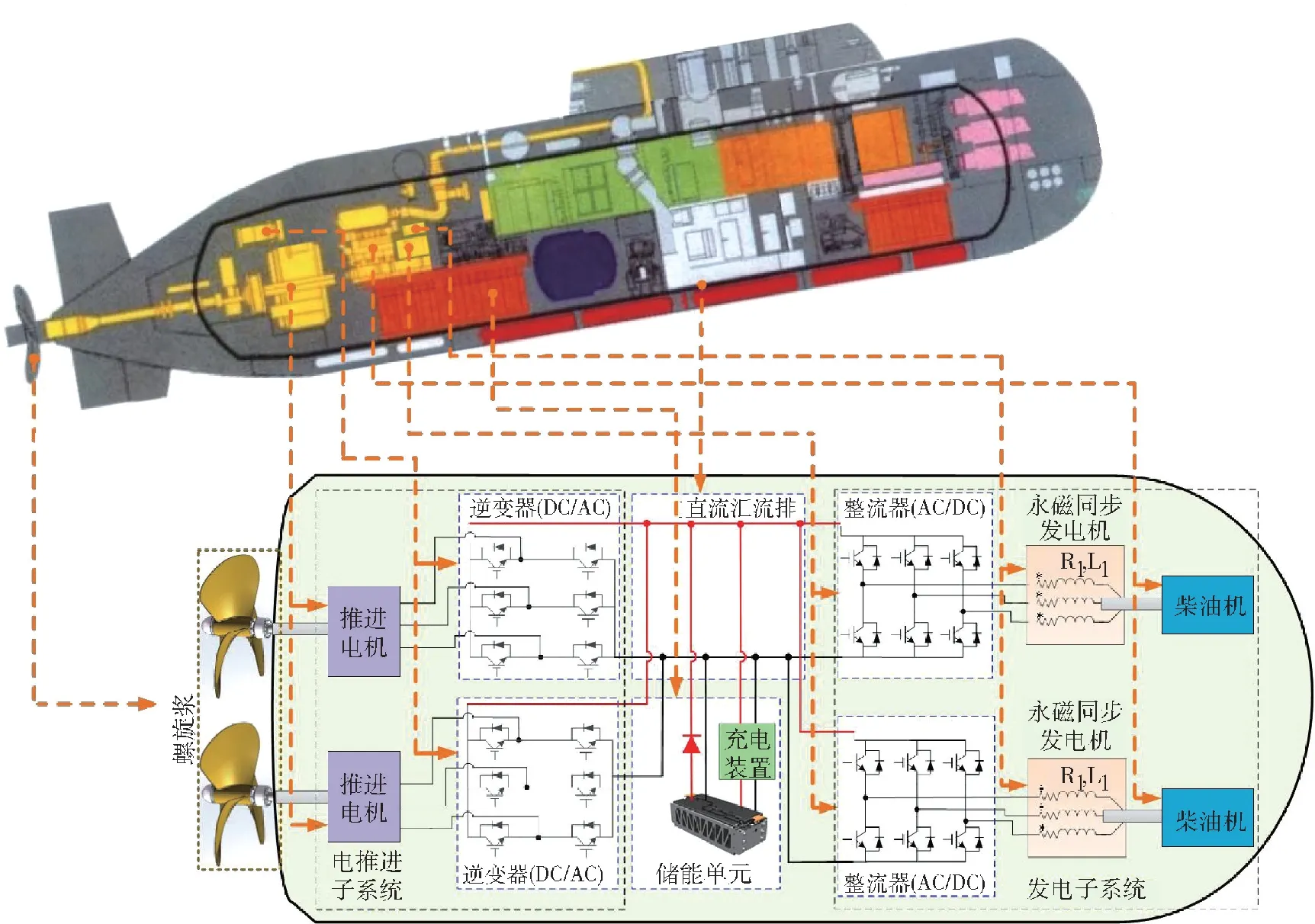
图1 一种典型的水下航行器EEPS架构示意图
1.1 柴油机及其转速控制系统建模分析
为构建柴油机的实用化动态仿真模型,在对柴油机内部燃烧、热力等瞬态过程的抽象及简化基础上,根据柴油机各组成部分的工作原理确定模型的数学结构形式,通过测试分析方法完成模型中关键参数的抽取,在保证所建模型与柴油机实物输入输出特性一致性的前提下,提高仿真的速度,满足EEPS复杂系统实时仿真的要求。
1.1.1 柴油机及其转速控制系统建模
柴油机及其控制系统如图2所示,包括调速器、油门执行器及柴油机机体三部分。调速器实现柴油机曲轴输出转速的闭环控制;油门执行器根据调速器输出的控制信号调节油门齿杆位置,通过对柴油机本体供油量的调节,实现转速控制。图2中,ω*为曲轴角速度指令值,Δω为曲轴角速度控制误差,η*为齿杆位移指令,η为齿杆位移,ω为曲轴角速度。

图2 柴油机及其转速控制系统框图
忽略柴油机的摩擦力矩,根据达朗倍尔原理,柴油机的机械运动方程可以表示为
(1)
式中:Je为柴油机及轴系转动惯量;z为油门齿杆位移量;Td、Tr、TL分别为输出转矩、阻力矩及负载转矩。
忽略负载转矩的扰动,并假设扰动作用下曲轴角速度、输出转矩及阻力矩产生的小信号变化量分别为Δω、ΔTd、ΔTr,对式(1)进行小信号分析,可得
(2)
与转矩有关的小信号变化量可以表示为
(3)
由式(2)及式(3)可得
(4)
设ωn为柴油机曲轴额定角速度,ze为柴油机油门齿杆额定位移量,将式(4)中的小信号变化量基于各自信号的额定值进行标幺化处理,得到
(5)
式中:φ=Δω/ωn;η=Δz/ze。
将式(5)变化到频域,考虑到燃油从喷入气缸到完成燃烧并输出转矩存在一个延时时间τ,得到包括延时环节e-τs(s为拉普拉斯算子)的柴油机本体传递函数为
(6)

柴油机的油门执行器以直流伺服电机为驱动单元,并通过齿轮传动机构带动齿杆运动,油门执行器的输出为齿杆位移η,其控制框图如图3所示。图3中,uD为齿杆位移控制误差,Ce为直流伺服电机的电压常数,TD为直流伺服电机1阶惯量时间常数,GD为直流伺服电机传递函数,ωD为直流伺服电机转速,kD为传动机构机械时间常数,Gη为传动机构传递函数。

图3 柴油机油门执行器控制框图
直流伺服电机传递函数:
(7)
传动机构传递函数:
(8)
TD=JRD/(CmCe),Cm=Tsn/isn,Ce=E/nsn
(9)
式中:J、RD分别为转动惯量和电枢电阻;nsn、Tsn、isn、E分别为伺服电机的转速、转矩、励磁电流及空载电动势的额定值。
由式(7)、式(8)得到油门执行器的闭环传递函数为
(10)

本文研究的柴油发电机组参数如表1所示,使用德国HEINZMANN电子调速器,调速器采用PID控制,将式(6)中涉及到的系数Kη归入PID参数中,得到柴油机及其控制系统的结构框图如图4所示。

表1 柴油发电机组参数

图4 柴油机及其控制系统结构框图
1.1.2 柴油机模型参数抽取
图4所示柴油机模型中待确定的参数为Tα、τ、Wn、ξ。为获取这些参数,需要计算柴油机的自稳定系数F[15]为
(11)
式中:Tdn为柴油机额定转矩。
基于自稳定系数F可计算柴油机加速时间常数为
Tα=Je/F=Jeωn/Tdn
(12)
式(6)中,τ为燃油燃烧过程引入的纯滞后时间[16],该值的计算公式为,
τ=(60×Nst)/(Ncyl×ne)
(13)
式中:Nst、Ncyl、ne分别为柴油机冲程数、气缸数及额定转速。
式(10)表达的油门执行器是一个典型的2阶系统,利用经典控制理论中给出的2阶系统动态跟随性能指标和Wn、ξ的关系,可以得到[17]
ξWn=1/(2TD),ξ=0.707
(14)
联立式(9)、式(14),可求得固有角频率为
Wn=4.242
(15)
利用式(12)~式(15)可以进行柴油机模型参数的计算。除转动惯量Je外,其他参数都可以通过前述方程及表1求得。本文给出了一种针对柴油机及其输出轴系的转动惯量测定方法,基本思想是控制与柴油机同轴连接的发电机,使其运行在电动模式并输出恒定转矩,发电机反拖柴油机到特定转速,记录加速过程中转矩施加时间及柴油机转速的变化率,根据刚体定轴转动定律可以计算转动惯量如下:
Je=MT/∂
(16)
式中:MT为反拖柴油机运行的外加转矩(N·m);∂为柴油机输出轴角加速度(rad/s2)。
发电机与柴油机同轴连接并运行于电动模式,外部力矩作用下的柴油机转速响应曲线如图5所示。

图5 外部力矩作用下的柴油发电机组转速响应曲线
由图5可以得到:
式中:KN为转矩电流比,由电机的特性决定,在电机的恒转矩区KN为常数,可以通过实验测得,本文永磁电机的KN=3;Is为电机相电流幅值。则有
Je=MT/∂=MTΔt/Δω=12.84 kg·m2
(17)
将式(17)代入式(12),得到
Tα=Jeωn/Tdn=1.683 s
(18)
最后得到表1所示参数的包含柴油机机体及油门执行器的柴油机本体系统数学模型如下:
(19)
1.1.3 柴油机调速控制器设计
图6所示柴油机本体系统的传递函数为4阶,可以对高阶系统进行降阶处理,等效为2阶系统后,再按照经典控制理论的最优整定方法[18]完成柴油机调速控制器Gc(s)的设计。
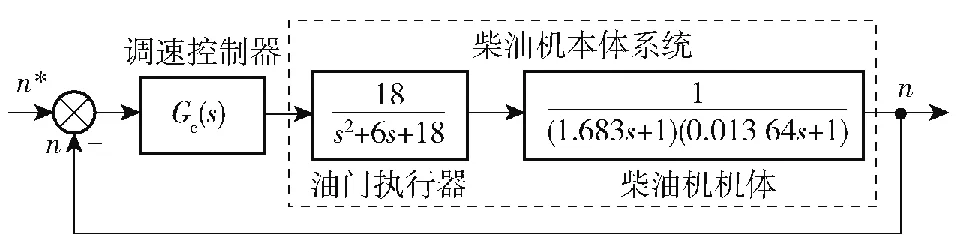
图6 柴油机及其调速控制器结构框图
Gc(s)分别采用PI或PID的结构形式,进行柴油机系统在突加及突卸额定转矩负载时转速响应的对比仿真,结果如图7所示。
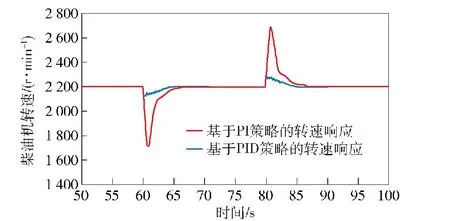
图7 采用不同类型的调速控制器时的转速响应
对比图7中的两条转速响应曲线可以看出,在柴油机的调速控制器Gc(s)中增加微分项,利用微分项对转速误差的预测作用可以有效地抑制转速的超调,因此柴油机的调速控制器一般采用PID结构。
1.1.4 柴油机模型验证
为验证本文搭建的柴油机模型的正确性,对柴油机空载启动及突加、突卸负载工况进行仿真,并与柴油机的实际实验曲线进行对比。
图8所示为柴油机空载启动过程中转速的仿真及实验曲线,从中可以看出柴油机从零速启动到怠速以及从怠速升速到额定转速两个过程中,仿真波形与实际实验波形具有很好的吻合度。

图8 柴油机空载启动过程转速响应的仿真与实验结果对比
图9所示为柴油机工作在额定转速,突卸100%额定负载时的转速响应仿真与实验曲线的对比结果,可以看出动态过程中本文建立的柴油机模型与柴油机实物系统的转速响应具有较好的一致性。

图9 突卸负载过程柴油机转速响应的仿真与实验结果对比
1.2 三相交流PMSM及变流控制系统建模
PMSM的运行理论基本上建立在对时间向量和空间矢量分析的基波分析理论上,而永磁电机的基波模型分为时域中的连续模型[19]和z域中的离散模型[20]两大类。考虑到基于DSP的变流器系统基于数字化技术加以实现,实现过程是离散化的,建立被控对象永磁电机的离散化模型有利于变流控制策略与电机本体的匹配设计,因此研究电机的离散化建模方法十分必要。以文献[20]为代表的一类常用的离散建模方法基于前向欧拉法实现对永磁电机微分方程的求解,求解过程设置了较强的假设条件,所得到的离散化解精度并不高。作为一种改进,本节提出一种针对PMSM的离散域建模方法,具有更高的精度。
1.2.1d、q轴坐标系下PMSM离散化模型
在d、q轴坐标系下,矢量矩阵形式的PMSM状态空间表达式为
didq/dt=Aidq+Budq+C
(20)

为获得PMSM离散域中的数学表达式,首先需要求取式(20)所示状态方程在时域中的全解,然后进行离散化。假设变流控制系统的控制周期为Ts,则处于第k拍和第k+1拍之间的时刻t可以表示为t∈[kTs,(k+1)Ts],采用0阶保持器实现离散系统向连续系统的转换,对式(20)所示系统的时域解进行离散化,得到PMSM在离散域的数学模型,如式(21)所示,详细推导过程见附录A。
(21)

根据第kTs时刻的idq(k)、udq(k),基于式(21)可以精确计算得到(k+1)Ts时刻的idq(k+1)及电磁转矩Te(k+1)。
附录A所给出的电机模型同时适用于凸极式及表贴式PMSM,由于其离散化过程未涉及近似求解,与传统方法相比,本文所求得的PMSM离散域模型具有更高的精确度。
1.2.2 PMSM控制策略
图1所示系统中,永磁同步发电机-整流器组成的AC-DC系统以及由逆变器-永磁同步推进电机组成的DC-AC系统,由于逆变器和整流器的硬件均基于三相全桥拓扑构建,且都以PMSM为被控对象,控制策略上是类似的。


图10 d、q轴坐标系下PMSM统一控制框图
1.3 航行器-螺旋桨系统建模分析
螺旋桨是航行器电力推进子系统的最终执行机构,建立其数学模型是分析航行器在各种工况下的负载特性的基础。定义螺旋桨的进速比为桨叶旋转一周后,螺旋桨轴向前行进的距离与桨直径之比。在航行器航行时,其航速或者螺旋桨转速的变化都会引起进速比的变化,进速比的变化又将进一步引起螺旋桨负载转矩的变化。为更好地体现螺旋桨的动态特性,本文采用将螺旋桨和航行器作为整体进行建模的方法。
1.3.1 航行器-螺旋桨系统模型
进速比J′的定义为
(22)
式中:vp为螺旋桨前进速度;Np为螺旋桨的转速;D为螺旋桨直径。
螺旋桨的转矩系数K′M和推力系数K′P定义为
(23)
式中:M为螺旋桨负载转矩;ρ为水的密度;p为螺旋桨推力。
航行器航速vs与螺旋桨前进速度vp满足
vp=(1-w)vs
(24)
式中:w为伴流系数。
由式(23)可知,螺旋桨推力p以及作用到航行器上的有效推力pe之间满足
(25)
式中:t为推力额减系数。
由式(23)可得螺旋桨负载转矩M满足
(26)
航行器所受阻力Rf满足
(27)
式中:A0为航行器表面的湿面积;ζ为总阻力系数。
综上,航行器的机械方程可以表示为
(Ms+ΔM)·dvs/dt=pe-Rf
(28)
式中:Ms为航行器的质量;ΔM为随航行器运动的附着水的质量,一般取ΔM=(5%~15%)Ms。
1.3.2 航行器及其螺旋桨推进系统一体化建模
螺旋桨与推进电机同轴相连,推进电机输出转矩驱动螺旋桨旋转为航行器的航行提供动力。基于式(21)~式(28),建立包含推进电机/螺旋桨推进系统的航行器一体化模型,如图11所示。

图11 航行器及其螺旋桨推进系统一体化模型
根据设定的航速,可以由式(22)和式(24)计算得到螺旋桨的转速Np,螺旋桨与推进电机同轴连接,因此螺旋桨与PMSM的转速相同,该值将作为推进电机的转速指令值,按照图10给出的电机控制策略,控制推进电机按照指令转速进行旋转,输出转矩,抵消螺旋桨旋转过程中的阻力矩,实现对航行器的推进。
1.3.3 航行器及其推进系统一体化模型的参数获取
图11所示模型较全面地反映了推进电机-螺旋桨-航行器三者之间的相互作用,但模型较复杂,且模型中螺旋桨推力系数K′P、转矩系数K′M等关键参数在实践中很难直接获得,一般都是通过经验公式来间接求取,参数准确性将直接影响模型的精度。
由式(23)可知,螺旋桨的推力系数K′P,转矩系数K′M和进速比有关,航行器在特定航行条件下(装载、气候、海面状况等条件不变)航行时,可认为进速比为常数,由式(22)和式(26)可以将螺旋桨转矩M的方程简化为
(29)
式中:等效转矩系数KM为常数。螺旋桨转矩M即为驱动电机的负载转矩。
航行器的前向、定常航行状态对应以下4种典型工况,典型工况下的航行特性可以归纳为:
1) 系泊航行特性:表征航行器满载且航速为0 kn时桨速与桨转矩之间的关系,正向起车时航行器航速接近为0 kn,可以等效为系泊特性;
2) 自由航行特性:表征航行器满载航行在静水中桨速与桨转矩之间的关系;
3) 拖曳航行特性:航行器在大风浪中逆风航行或拖动拖曳性负载(如拖船),推进阻力增大,螺旋桨转矩特性上移,介于自由航行与系泊航行特性之间;
4) 轻载顺航特性:船舶阻力较小,螺旋桨特性处于自由航行特性之下。
航行器运行在上述4种典型工况下,螺旋桨转矩特性均满足式(29),差别仅在于等效转矩系数KM取值不同。通过实航获取上述航行器的“转矩-桨速”数据,利用曲线拟合可以精确地获得螺旋桨的转矩特性曲线。
以本文研究的航行器本体及配套的螺旋桨为对象,通过实航测试的方式,分别测得上述4种典型工况下螺旋桨的转矩特性曲线,如图12所示。
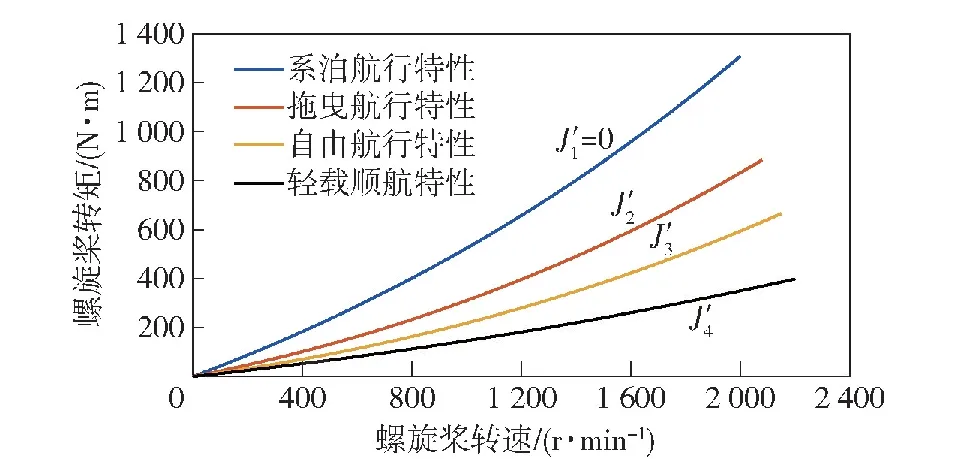
图12 典型航行状态下螺旋桨转矩特性
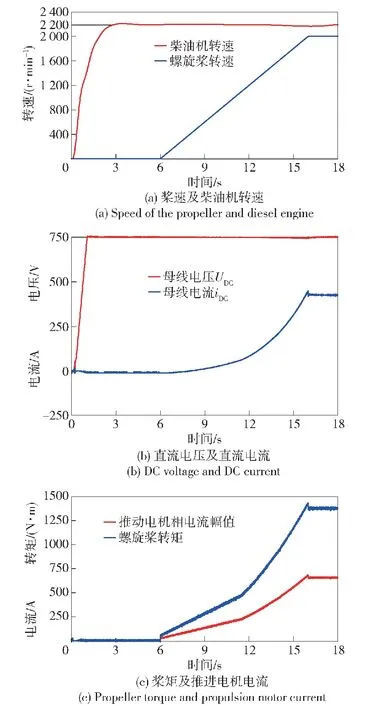
由图12可以看出,4种航行状态的进速比满足0=J′1 系泊航行特性: (30) 自由航行特性: (31) 系泊航行特性和自由航行特性是航行器螺旋桨特性的两种最常用的形式。基于式(30)、式(31)所分别表示的航行器在系泊航行和自由航行两种典型工况下的螺旋桨转矩特性,可以较精确地反映推进电机与螺旋桨间的相互作用情况。 为了对某中型航行器EEPS的动态及稳态特性进行仿真研究,基于本文建立的数学模型,在MATLAB软件的Simulink仿真环境建立包括柴油机、PMSM、变流器(整流器/逆变器)和螺旋桨在内的航行器EEPS仿真模型,并搭建系统的一体化数字仿真平台,如图13所示。 图13 航行器EEPS一体化数字仿真平台 基于上述仿真平台,对柴油机空载启动、直流母线电压建立以及螺旋桨由零速启动并升速到额定转速的完整过程进行仿真。为减少仿真程序的运行时间,在仿真中人为地压缩了启动过程,这一点与航行器的实航实验略有不同,其他方面则模拟实航工况。仿真过程如下:0 s末启动柴油机,发电机组随着柴油机转速升高,输出直流电压达到额定值(750 V),6 s末螺旋桨由零速启动并升速到最高转速(2 000 r/min),螺旋桨升速过程中推进电机的负载转矩按照航行器的系泊特性曲线进行设定。为评估推进系统启动方式对EEPS的影响,分别进行螺旋桨转速指令斜坡给定及阶跃突加给定两种方式的仿真。图14为螺旋桨转速指令采用斜坡给定时的仿真结果,指令值每秒增加200 r/min,可以看出整个启动过程中能源动力系统的直流侧电压及原动机转速均保持设定值,螺旋桨升速过程平稳;螺旋桨的转速指令设定采用分段、阶跃给定的方式,得到仿真结果如图15所示。由图15可以看出,转速指令突增后一段时间内螺旋桨及推进电机承受很大的过载转矩,且升速瞬间母线电压及电流均有较大幅度的波动,表明这种启动方式对航行器的电网造成很大的冲击,严重时会危及电网的稳定性。因此在实际的运行中,航行器由零航速启动时推荐采用分段启动,且启动过程中螺旋桨转速指令采用斜坡给定的方式,以有效缓解对航行器传动轴系及直流电网的冲击。 图14 桨速指令斜坡给定时的航行器启动、加载过程 图15 桨速指令阶跃给定时的航行器启动、加载过程 航行器及EEPS的实物如图16所示,系统组成原理参见图1。为验证仿真模型与实物系统的一致性,开展典型工况下仿真与实验的对比研究。在1.1节图8、图9中已经验证了本文搭建的柴油机模型与柴油机实物的一致性,下面针对图16所示航行器EEPS的前级发电子系统和后级电推进子系统分别进行仿真,并将仿真结果与实验结果进行对比,以验证模型的准确性。 图16 航行器及EEPS实物系统 结合航行器的真实工况,共设计以下3组对比实验。 突加负载实验用于模拟螺旋桨突然加速、发电子系统载荷突增工况下的直流侧电压变化情况,本实验在地面进行,以突加电阻性负载的形式模拟发电子系统的负载突增。两次分别突加75 kW电阻性负载,仿真结果及实验结果如图17所示,突加负载后在直流侧电压跌落量及电压恢复时间两个主要指标上,系统性能良好,且仿真结果及实验结果均有很高的一致性。 图17 突加负载时发电机组输出直流电压仿真与实验结果对比 发电子系统甩负荷测试用于模拟实航恶劣海况下由于螺旋桨浮出水面或电推进子系统突发故障引起的直流侧负载突卸,在台架实验中通过对推进电机的逆变器突封PWM脉冲来模拟。发电机组转速及输出直流电压的仿真及实验结果如图18所示,从中可以看出,由负载突卸到系统达到再次稳态过程中,在直流侧电压、发电机转速波动及响应时间等关键技术指标方面,仿真与实验结果具有较好的一致性。 图18 甩负荷测试过程中发电机组转速、输出直流电压仿真与实验结果对比 分别通过实航实验及仿真获取螺旋桨转速由 1 200 r/min 逐级增加到2 000 r/min过程中永磁同步推进电机的电流、螺旋桨转速曲线,如图19所示。为减小对系统的冲击,在进行实航海上实验过程中,螺旋桨转速指令按照斜坡给定的方式进行设置,实航相关数据通过CAN总线采集并由数据记录仪记录,数据记录间隔为0.5 s,截取的记录总时长约为18 min。由于仿真持续时间受到计算机性能的限制,在仿真中螺旋桨转速指令采用阶跃给定的方式,将整个仿真工况的总时长控制在16 s。由于永磁同步推进电机采用MTPA的电流分配策略,在稳态下电机相电流与输出转矩具有一一对应关系,通过航行实验电机电流数据可以推算出电机输出转矩情况。 图19 电推进子系统转速、转矩特性仿真与实航测试结果对比 图19表明:稳态工况下,同样螺旋桨转速下,仿真与实航实验时推进电机的稳态电流幅值相同(由于分别采用了阶跃给定和斜坡给定的方式,动态过程电流幅值不同),电流幅值相同则表明输出转矩相同,证明了本文建立的电推进子系统模型与实际系统的转速-转矩特性具有较好的一致性;实航实验动态及稳态过程中电机电流实际值快速跟踪指令值的变化,表明电流闭环控制系统性能良好。 本文以某中型水下航行器EEPS为研究对象,在对EEPS各关键组件进行特性分析和机理建模的基础上,搭建了包括柴油机、PMSM、变流器和螺旋桨等核心组件的EEPS一体化仿真平台。为验证仿真平台的准确性,进行了系统级的全工况仿真并与EEPS实际系统搭载航行器所进行的实航测试数据进行了对比。得出以下主要结论: 1) 本文建模方法较好地平衡了模型精度和复杂度的关系,解决了模型参数获取困难的痛点问题,所构建的EEPS系统级仿真平台与实物系统的动静态性能之间具有较高的一致性,仿真模型及仿真平台可用于实时仿真,具有实用性。 2) 基于上述仿真平台,采用不同的启动策略,对航行器零速启动及加载过程进行了对比仿真,归纳出了螺旋桨转速指令值的设定宜采用斜坡给定、分段提速的策略,该提速策略可以有效地减小航速变化过程中负载突变对航行器传动轴系及直流电网的冲击,本文策略已在航行器的海试中得到了验证及应用,实际效果好。 3) 通过本文建立系统的仿真模型并进行仿真,可以完成对系统启动加载、负荷切换以及多套发电机组并入切出等复杂的动态过程分析及控制策略优化,从而缩短台架实验及实航验证时间,有效降低系统的研发周期和成本。 4) 本文提出的建模思路及建立的实时仿真平台为船用EEPS控制策略的设计提供了工作的基础,也可以为其他具有类似结构的级联型机电能量变换系统的研究提供有益的借鉴。2 系统仿真及分析

3 仿真与实验对比

3.1 发电子系统突加负载测试

3.2 发电子系统甩负荷测试

3.3 电推进子系统“转速-转矩”特性
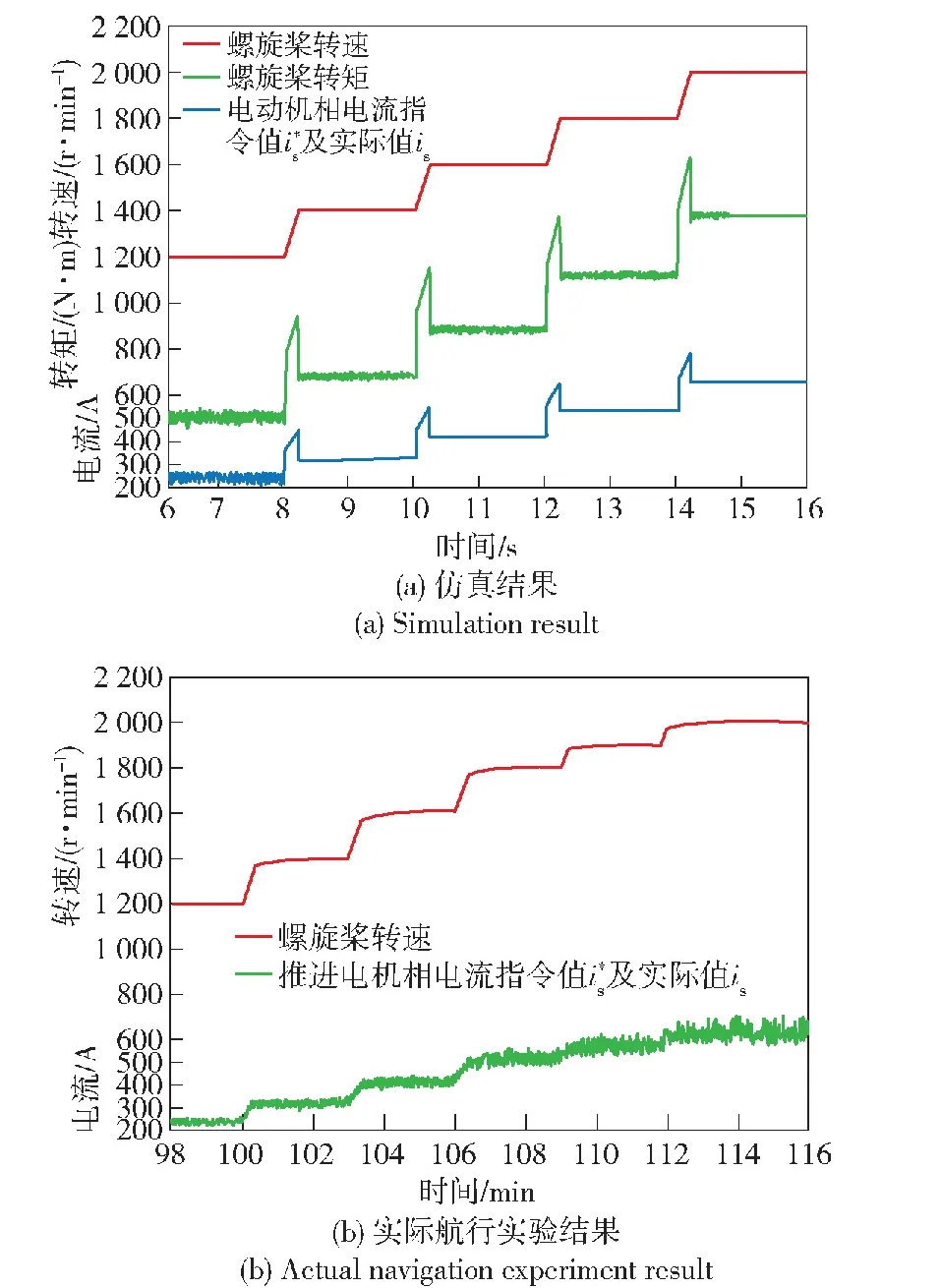
4 结论
