基于单片机的智能刹车控制系统
2023-08-07陈一鸣董国皇
陈一鸣 董国皇
摘 要:本文基于单片机设计了一款智能刹车系统,采用STC89C52RC芯片作为主控制器,设计了单片机最小系统电路、电源转换电路,步进电机和LCD1602显示电路。通过按键来切换工作模式,步进电机的转动速度代表着汽车运行速度,并通过液晶进行显示。软件系统用C语言作为程序设计语言,通过KEIL完成程序设计并用PROTEUS软件进行仿真,本系统的设计对未来刹车系统发展奠定了良好的基础。
关键词:STC89C52RC单片机 LCD1602 步进电机
1 引言
基于社会智能化的发展,大数据时代的到来,推动着智能化产品逐渐进入人们的生活中,人们为了追求安全的开车环境,普通刹车系统已经不能满足人们生活需求。然而安全问题是社会最为关注的问题,每年都有因为安全问题而丧失生命的事例。汽车作为现代化常用的交通运输工具,其制动系统对行车安全的影响很大因此刹车系统的质量、性能和可靠性是行车安全的重要保证。多年来许多研究者致力于汽车防抱死刹车系统的研究,随着时间的推移,如今防抱死刹车系统已成为大部分汽车的基本设备,逐渐普及化。尽管产品不断更新换代,它总是与用户的需求紧密相连的,一种基于单片机智能一体化概念的对于整个制动系统各部件的重新设计能够促使这个领域的重要提升,而汽车智能刹车系统是典型的机电一体化系统。[1]
2 智能刹车系统控制系统发展背景与价值
2.1 国外发展状况
随着科学技术的发展并逐渐运用到智能刹车系统设备中,国外很多大型企业和研究所都很看好智能刹车系统控制系统的市场前景,比如:博世、日立、大陆、Honeywell等公司,都对智能刹车系统控制系统展开了多方面的研究如德国的博世公司主要研究制动系统的控制方法;美国的Honeywell公司主要研究其刹车系统运行的稳定性。
2.2 国内发展状况
从目前的科技发展状况来看,我国已经逐渐从制造大国进入制造强国,为响应智能化安全控制相关政府报告,现阶段我国科学技术水平不断发展并提升了产品安全性,促使了产品具有新型价值。基于行车安全市场化的迫切需求,我国在智能刹车控制系统相关产品的研发和制造上有很大的发展前景空间。
3 系统总体框架设计
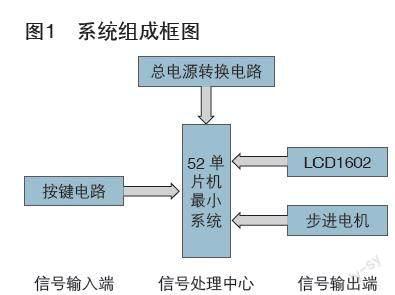
本文研究的智能刹车控制系统主要使用现代化通信技术,让用户依据自己的需求实现相应的控制要求来实现智能控制一体化,根据智能控制系统功能需求进行分析并结合现有的技术手段,完整的控制系统主要包括以下几个模块:信号输入端模块、信号处理中心模块、信号输出端模块。其中在信号输出端利用按键组件,通过三个按键切换系统的运行方式和速度,信号处理中心主要是单片机最小系统,包括电路设计,信号输出端是LCD1602显示屏,用来显示车辆运行模式和速度以及步进电机。从控制系统需要实现的功能和硬件设计的综合角度确立了系统组成总体框图。具体框图如图1所示。
4 系統的硬件平台设计
4.1 控制中心电路设计
4.1.1 最小系统电路设计
STC89C52RC单片机内部都含有ROM/EPROM的存储器,这是单片机组成该系列的最小系统的必要成分。使用STC89C52RC单片机组成最小系统,不需要有外接复杂电路,只需把最小系统所需的RST电路和TIME电路连接上。其单片机芯片的工作电压在2.7V到6V之间,内部嵌入4KB的只读存储器空间和256KB的随机存储器空间的,而且部分引脚含有特殊功能的,含有内部TIME电路,有定时和计数功能,当程序运行出现死机时,电路会立刻启动运行,系统工作的频率范围是0Hz到50MHz,当系统电源稳定时,工作频率可以达到55MHz左右,具有4*8的I/O接口,是一种低功耗,高性能的8位微控制器,另外具有性价比高,编程容易,工作性能稳定等优点。
4.1.2 电源转换电路
本文控制器系统设计所需的电源全部都是5V USB直流电源直接供电,为了使电源电路设计简单,通过手机适配器USB接口直接接入,然后转换为5V,这样可以保证系统电源稳定,而且成本低下。另外在开关输出处并联电容,进行滤波,保证电源稳定在5V输出,使得系统更加稳定的输出,通过红色LED灯可以清晰看出电源是否供上电。
4.2 信号采集与处理电路设计
4.2.1 步进电机与驱动电路设计
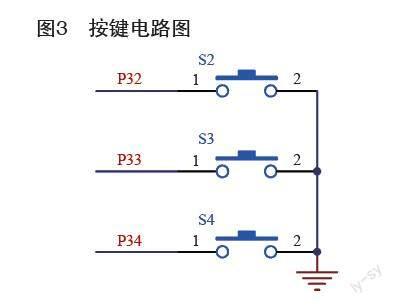
步进电机是依据脉冲信号来改变转速和转角一类电机,其工作原理是把电脉冲信号变为旋转位移信号,本系统选用的是ULN2003电机。在电机正常运行时,电机的速度和旋转位移只与单位时间脉冲信号的数量有关,若脉冲的给的频率很高,则电机的转速会增大,反之会降低。在一个周期内,若通电时间很短,则驱动频率会加快,电机的转速会提高,但是并不是频率越来电机转速越高,因为相位每走一步需要固定的时间,若给的频率太快,会导致失步,让电机停止运转。
本系统采用ULN2003电机驱动电路,ULN2003是高电压电流的达林顿晶体管,具有很强的放大能力非常适合步进电机的驱动芯片。步进电机控制电路图如下所示。
4.2.2 按键电路设计
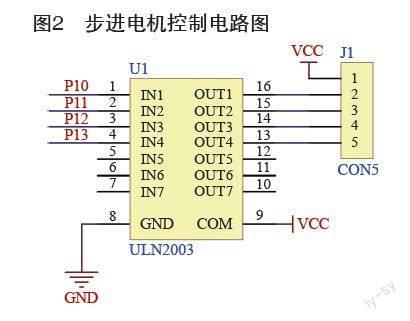
本系统设计采用的是对角线引脚是相互连通的四脚按键。按键的其中一脚接地,相应对角线连接在单片机的I/O口即可。当按键按下以后,会把单片机I/O引脚拉低,相当于单片机引脚输入低电平,若在程序中检测到I/O口输入的是低电平,则会作出相应的处理。按键电路图如下图3所示。
4.2.3 LCD1602显示电路设计
本文需要显示采集和处理的系统参数,从成本和设计难易程度选用LCD1602显示屏。LCD1602显示屏是一类工业级别的显示屏,在英文和数字字符显示场合得到了广泛应用。LCD1602显示屏主要有数个5*8或者5*11点阵符号构成,其中任何一个点阵都能够显示一个字符,因为LCD1602可以显示两行,因此一共可以显示16*2字符。该显示器具有功耗低、封装程度高、性价比高以及外围电路简单等特点。
LCD1602显示屏内部嵌入三种存储器,分别是DDRAM、CGROM和CDRAM存储器,DDRAM主要用来存储动态显示字符,CGROM用来显示192个字符对应的字模编号,CDRAM用来存储底层驱动程序和开发者自己设计的字符库。
LCD1602共有两端电源输入,一个是显示电源另一个是背光电源,可以通过程序设计背光时间,从而降低对能源的消耗。LCD1602一个有16引脚,其中三个信号线管脚、8个数据线管脚和一个对比度改变管脚,通过单片机进行控制。
本系统使用的是5V电压,因此可以直接给LCD1602供电,不需要额外增加电源转换电路,另外本电路通过10K(PR1)电位器调整显示对比度,当电位器调节到在1号端,对比度最低,到调节到3号,用信号线来读取液晶内部寄存器数据,双向数据线用来控制显示的字符内容。下图4为LCD1602显示屏硬件接线图。
5 系统软件平台设计
5.1 控制系统软件架构
本系统设计主要采用Keil软件编写与调试程序,程序语言采取易读性更高C语言编写。软件系统的运行流程是当系统上电后,首先进行模块初始化,若有模块器件损坏,则不能正常运行,然后系统开始采集数据和处理数据,若处理的数据正确,则开始接受数据把传输到输出端作进一步处理。系统运行流程图如图5所示,由图可知,系统软件通过不断访问各个子模块并把数据反馈到控制中心。
5.2 系统信号采集与处理程序设计
5.2.1 LCD1602程序设计
采用 LCD1602 作为显示模块,其操作时序包括读操作时序和写操作时序。系统上电后,LCD1602首先进行模块初始化,然后显示固定不变的字符;若液晶空闲,则控制中心给液晶发送显示的字符,若显示的字符有效,则LCD1602输出显示。
5.2.2 按键检测程序设计
当程序中定义的I/O口引脚检测到时低电平,则程序进入按键中断处理程序,延时1ms后,若引脚继续检测到低电平,则确定按键按下,执行相应的子程序,实现功能。按键执行流程图如下图6所示。
当系统上电后,系统主程序定时50ms检测一次按键,若有按键按下,则单片机I/O引脚检测到低电平,延时后再次检测到低电平信号,则按键确定按下,程序自动进入按键中断服务子程序。
5.2.3 步進电机程序设计
步进电机是依据脉冲信号来改变转速和转角一类电机,可以利用数字MCU设计相应的控制电路。步进电机工作原理是把电脉冲信号变为旋转位移信号,本系统选用的是4相单拍步进电机。在电机正常运行时,电机的速度和旋转位移只与单位时间脉冲信号的数量有关系,若脉冲的给的频率很高,则电机的转速会增大,反之会降低。此款电机的A、B、C和D四个线圈,若轮流给A、B、C和D四个线圈供电,则步进电机正转,可以通过单片机实现PWM调速。若需要步进电机反转,则只需要给线圈通电方式改为D、C、B和A,则电机就会反转。
6 系统调试
本文智能刹车系统由硬件系统和软件系统构成组成,在硬件系统中主要分为信号输入端、信号处理端和信号输出端。软件系统主要由实现各个功能的程序代码构成,在程序代码中采用模块化设计思想。在系统软件编写好后,对其进行调试和验证系统功能是否满足要求。如果系统软件调试没有问题时,接下来可以进行系统仿真,本系统采用PROTEUS软件进行仿真。
7 结语
本文在参考和研究分析目前的刹车系统研究的目的和意义的基础上,利用STC59C52RC单片机为控制芯片,结合按键数据采集、步进电机及液晶显示电路研究了基于单片机的智能刹车系统,主要以设备小型化与程序设计模块化的方向,设计了一款数字智能控制系统方案。这种智能刹车系统在硬件设计方式上运用了数据实时采集与上报显示技术。接下来简要说明了这种研究方法中所包含的关键技术和应用平台。最后介绍了智能刹车系统硬件平台搭建和应用程序的设计,实现了预期的数据采集、处理等功能,完成了预期的设计目标。
基金项目:2022年国家级大学生创新训练项目国家级科学研究成果(项目编号202212308001)。
参考文献:
[1]陆芳.汽车智能刹车系统的概念设计方法研究[J].东北大学,2005,(08).
[2]黄小燕.智能化技术在建筑电气工程中的运用[J].建筑工程技术与设,2015,35(10):693-696.
[3]杨希.无线传感器网络协议栈与定位技术的研究与实现[D].东南大学,2012.
[4]曾非一.嵌入式软件开发技术研究—MPC860目标机底层软件的实现[D].电子科技大学,2004.
[5]刘美红.基于ARM的汽轮机监视保护系统设计与实现[D].武汉理工大学,2005.
