基础设施的水下机器人检测应用与展望
2023-07-28井国庆卜俊杰蔡加付
井国庆,卜俊杰,蔡加付,2
(1.北京交通大学土木建筑工程学院,北京 100044;2.杭州申昊科技股份有限公司,浙江 杭州 311121)
水下基础设施承受水流冲刷,生物化学侵蚀等影响,出现的病害严重威胁安全运营。例如2000年,台湾省高屏大桥发生坍塌,造成22人受伤。原因是早已裸露的基础被河水冲垮。截至2022年,德国47%的桥梁年龄超过40年,法国和英国的桥梁缺陷率分别为39%、30%[1]。
传统检测方法,比如钻孔取芯法、水下目视法、低应变法等,存在精度低、检测行为易影响正常交通运行、狭小危险区域检测难度大等缺点。目前出现了许多新技术,比如声呐探测法、视觉图像分析、水下高光谱成像技术和水下机器人技术等[2-3]。水下机器人是一种智能潜水器,能够代替人在水下环境作业。随着自主航行控制、导航通信、动力推进、目标识别、机械手作业等技术的不断突破,水下机器人能够在极端环境中完成基础检修工作。
1 水下机器人简介
水下机器人分为载人潜水器(HOV)和无人潜水器(UUV),UUV又分为有缆遥控水下机器人(ROV)、自主水下机器人(AUV)、自主/遥控水下机器人(ARV),如图1所示[4]。
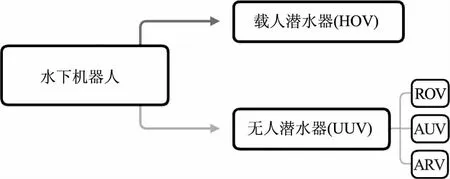
图1 水下机器人分类
ROV通过电缆与水上平台(比如母船,岸上操作台)相连接,操作人员可以进行数据传输,能源提供等实时操作。ROV优点是可以在小范围内进行精细作业,但是电缆的长度会限制ROV的作业范围。AUV携带能源,可自主航行,进行较大范围作业,但是在续航和实时数据传输方面存在技术困难。ARV是结合前两者技术的混合式水下机器人,具有自主、遥控、半自主等不同作业模式。ARV不仅能实时数据交互,还能进行长距离精密作业。ARV的研发代表着信息型AUV向作业型AUV的过渡[5]。
2 应用领域
水下机器人在水下基础设施检测、水下结构清洗、深海作业和水下救援打捞等领域应用广泛。
2.1 水下基础设施检测
水下基础设施主要涉及桥墩、大坝、海上建筑和水工隧道等。利用UUV检测水下结构物及周边环境状态,可以判断结构物是否满足预定的功能要求。
UUV检测系统可以集成高清摄像、声呐扫描、激光成像等技术,生成高精度三维图像,准确定位病害位置和量化病害程度达到毫米级。
2.2 水下结构清污
水下生物、脏污会附着并腐蚀基础表面,对于长时间航行的船只,船身附着的脏污会降低航行速度,增加油耗。清洗型UUV能够代替人工高效清除脏污。清洗型UUV主要采用真空吸附、磁吸附、推力吸附等爬壁方式。真空吸附结构简单,成本低,但是对船体表面平整度要求高。磁吸附分为电磁吸附和永磁吸附,电磁吸附可通过电流控制吸附效果,但是需要大量电能。永磁吸附可靠性高,但是UUV的安装、卸取不方便。推力吸附适应性强,但是推力装置消耗能源多,噪音大。
清除脏污的方式主要有机械刷、高压水柱、高压空化水射流、超声波等方法[8]。这些方式相互配合,大大提高了清洁效率,并且对结构物表面的损害很小,已经成为水下结构物清污的主流方式。
2.3 深海作业
海底输送管道可能会出现渗漏的现象,需要维修人员定期进行检查。UUV机身的耐腐蚀性和高承压性使其进行深海作业成为可能,其拍摄的石油管道渗漏图片经过处理后可以清楚了解渗漏的情况和位置。除此之外,UUV还可以利用机械手臂进行抓取物体、水下焊接、拆卸部件和开关阀门等管道维修操作[11]。
2.4 水下救助打捞
潜水员在进行水下救援时除了会面临高压、涡流和低温等自然危险,还可能会出现化工污染等人为灾害。水下救援机器人可承受高压、低温、有害污染物的影响。此外,机器人可以携带大量救援物资。小型UUV还可进入狭小空间,提高救援效率。除此之外UUV还可用于水中异物打捞,比如在一些水力发电厂中,会使用UUV进行异物搜索,避免螺栓、螺母等小型零部件进入电站设备内,保障发电厂的安全运行。
3 关键技术
水下机器人正朝着系统化、智能化和技术聚类的方向发展,所涉及的关键技术是进行快速、准确作业的保障,主要包括续航时间、自治水平、水下通信质量和推进技术等。
3.1 续航时间
多数情况下,虽然母船暂时解决了UUV的充电问题,但是母船费用高昂,并且充电过程会花费不少时间。所以研究UUV电池续航能力和充电技术是非常重要的。
UUV采用的电池主要包括以下几类:燃料电池、半燃料电池、二次电池等。燃料电池使用寿命长,在很多领域都获得了成功的应用。在半燃料电池中,金属作为阳极,空气作为阴极,海水作为电解质,能够获得较高的能量密度。二次电池可充电,使用次数可达上千次[12]。除上述采用电池为能源外,UUV还采用热机(闭循环柴油机、斯特林发动机),可再生能源(潮汐、洋流、海风、水温差和盐度差)等。
水下机器人采用的充电技术主要有水下充电桩充电,太阳能充电等。水下充电系统支持自动对接、电池充电以及数据传输等功能。水下充电分为有线电能传输和无线电能传输2种方式,有线电能传输对接口的密封性要求很高,通常采用湿插拔接头充电,接头周围配备橡胶环,借助水体的压力将接头的开口封死形成密封的空间,在空间内完成电缆的插拔[13]。无线充电技术基于电磁感应原理,AUV自主驶入充电坞内,充电坞上的抱紧装置将其固定,然后充电桩通过“电—磁—电”的方式将电能从充电坞传送到AUV。该方式无需缆线连接,去掉了供能侧和AUV的接头,提高了设备的密闭性,同时其定位精度要求也较低。
太阳能充电为AUV提供了几乎源源不断的能量,并且对环境友好,节约了成本。
3.2 自治水平
提高UUV自治水平,能让操作人员摆脱繁重的作业量,而自治水平主要体现在路径规划方面,其分为全局路径规划和面对新环境时的局部路径规划。
UUV路径规划分为5个步骤:环境信息收集、环境建模、全局路径规划、环境感知、局部路径规划调整[15]。
(1)UUV通过传感器收集周围环境及自身的信息,比如障碍物位置、移动速度、水流速度、机体的运动状态等。
(2)通过采集到的数据和已有环境参数进行环境建模。一般常用的建模方法有规则网格模型法、不规则网格模型法。
(3)通过优化目标函数,例如避障性能、时间和能源消耗等函数进行全局路径规划。规划算法有遗传算法、蚁群优化算法、快速探索随机树等。
(4)在航行过程中不断采集实时环境参数,感知未知障碍物。
(5)数据更新,局部路径调整,不断优化全局路径。涉及的算法主要有人工势场、模糊逻辑算法和人工神经网络等。
针对路径规划,国内许多大学和机构对此得出了不少研究成果,比如基于改进蚁群算法的水下自主航行机器人路径规划;基于RRT*算法的水下机器人全局路径规划方法;基于模糊算法的AUV避障与姿态控制等[16-18]。
3.3 水下通信
面对未知的工作环境,拥有可靠的通信系统才能保障对UUV的高效控制。
当前,水下通信主要有2个大方向:①有线通信,包括电缆通信、光纤通信和电力载波通信等;②无线通信,包括声学通信、无线电通信和光通信等。有线通信虽然数据传输效率高,但作业范围会受缆绳长度的限制,并且缆绳可能会缠绕杂物。对于无线通信,声学通信比其它通信衰减更小,通信范围更广,是目前UUV通信领域中应用最广泛的技术。上述的无线通信方法可以依靠卫星、地面接收站、潜艇等作为通信中转站,UUV协同探测方案如图2所示。
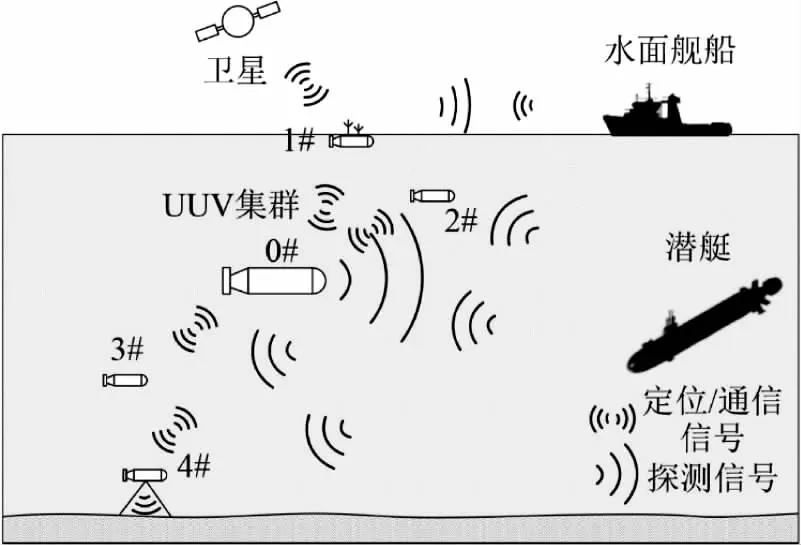
图2 UUV集群协同群探测示意图[19]
3.4 推进技术
水下机器人的推进方式主要有螺旋桨推进、喷水推进、仿生推进、履带推进等。
UUV可以通过控制桨叶旋转速度和方向来调节水下机器人的运动状态,也可以采用液压推进系统增大调速范围。喷水推进器是水泵将水加速后喷射出去,反推机器人前进,速度快,噪音小。除了水泵推送,还可以在推进器内的水体中施加电场,利用洛伦兹力将水喷射出去。
通过模仿水生动物的运动方式,仿生UUV灵活性强、能源消耗少,并且对环境的干扰小。UUV能够模仿很多水生动物,比如鱼、蛙、乌龟等。采用履带推进的水下机器人,多用于水底作业,比如海底管道和电缆的铺设,其具有良好的越障能力。除此之外,有一种无动力装置的UUV—水下滑翔机,它依靠自身重力和浮力前进。比如我国完全自主研发、拥有自主知识产权的“海翼”号就是一个典型的水下滑翔机。
4 发展趋势
面对日益严峻的水下作业任务,水下机器人技术必须不断革新。现阶段用于水利工程检测维修的水下机器人在还存在一些不足。这里将针对这些难题提出对应的发展策略。
4.1 通信
在水下工程检修中,经常会遇到水体浑浊、噪音大和水流湍急等情况。这些不利条件会对水下通信产生影响,造成传输速率低,精度差,形成通信盲区等。此外,声学通信存在带宽限制、多普勒效应等技术难题。对此,亟需优化通信系统,提高其可靠性、稳定性和实时性。
近年来,我国水声通信领域取得了一定进展。在后续研究中,以下3个方面要作为重点方向:①近程高速水声通信节点及组网技术的研究,以满足浅海网络观测中海量数据的交互需求;②远程和超远程低速通信技术的研发,提高通信距离和速度,研究兼容远程低速的网络协议;③发展与水声通信网络能力相匹配的协同观测技术,提高观测站的数据预处理能力,充分发挥网络观测的协同优势。以上的研究将很好地解决水下声学通信中遇到的一些难题。
在检测维修中,经常需要AUV机群协同工作,共享信息,发挥不同机型的优势。为了实现机群有效控制,设计具有时延容限的AUV编队系统是一个热门研究方向。另外关于如何处理通信故障,目前的研究大多都是假设个别AUV“暂时性故障”而进行的故障修复机制,没有对“永久性损坏”情况下的故障修复做充分分析,所以在今后的研究中要兼顾到这一点。
4.2 仿生技术
仿生UUV通过模仿水生生物的形态和动作来获取动力,并且受到的水流阻力小,近年来发展迅速。但是作为一项新技术,仿生UUV面临许多难题。
①人们对仿生流体动力学的了解不够深入,所以后续的研究中要更好地建立运动模型。②材料的难题,“鱼尾”、“鱼鳍”的摆动对材料要求很高。未来,一些智能材料,比如形状记忆合金材料、离子导电聚合物材料、压电材料和纳米碳复合材料等,这些材料的发展将很好地完善仿生UUV的性能。③流量传感和运动控制。当前的仿生UUV系统是以开环方式控制的,无法对周围的环境刺激做出像水生生物一样的快速反应。近年来,随着新型传感技术的发展,闭环控制成为可能,有望提高仿生UUV的机动性。
4.3 其它方面
①在能源方面,太阳能电池、生物电池、压电元件等新型电池不断发展,使得水下机器人的续航、速度等方面性能有所提升。②在体积方面,电子元件小型化以及新材料的应用将降低机器人的尺寸与成本,提高其灵活性、更好地探索狭小空间,也为群体协作提供方便。③在智能化方面,计算机性能的提高将更好地创建强大的控制系统。基于环境测量的控制系统将使机器人更具自主性,使其能够根据周围环境变化,自主规划合理路线。
5 结语
水下机器人集成众多先进检测方法,多学科相互融合,能够高效精确地进行检测维修。但面对复杂严峻的水下作业任务,水下机器人技术仍是任重道远。本文通过对水下机器人在基础设施检测、结构清污、救援打捞等应用领域的介绍,对续航、自治、通信等关键技术难题的总结,进而重点提出了通信、仿生、能源等热门的研究方向。在未来,应提升水下机器人在这些关键领域的技术水平,从而使其在水利工程检测维修中发挥更重要的作用。
