扑旋翼刚度和翼梢形状对气动升力和效率的影响
2023-07-28贺媛媛张航王琦琛杨炫
贺媛媛,张航,王琦琛,杨炫
北京理工大学 宇航学院,北京 100081
受自然界中鸟类和昆虫等飞行生物敏捷飞行特点的启发,具有高机动性和高气动效率的仿生扑翼微型飞行器(Flapping Wing Micro Aerial Vehicle, FW-MAV)在过去几十年中已经成为一个热门研究领域[1-3],对于仿生FW-MAV 的设计尤其是空气动力学的研究越来越受到重视[4-6]。扑翼的研究分为2 类:一类是仿鸟翅纵向拍动的扑翼,其具有机构相对简单、柔度相对大、拍动以产生推力为主的特点,但不具有垂直起降(Vertical Take-off and Landing, VTOL)和悬停的功能。Hu 等[7]比较了安装柔性翼和刚性翼的仿鸟FW-MAV 在不同拍动频率、俯仰角和来流速度下的气动性能,结果表明柔性扑翼对FW-MAV气动性能影响很大,在高速飞行或相对大迎角条件下,具有柔性翼结构特征的FW-MAV 气动性能相比刚性翼更佳;另一类是具有VTOL 和悬停功能的仿果蝇或蜂鸟翅横向拍动(∞字形轨迹)的扑翼,这是目前仿生扑翼的主要研究方向,这类扑翼的特点是刚度相对大,以产生升力为主。荷兰代尔夫特理工大学研制了一种仿果蝇飞行机制的FW-MAV[8],重29 g,翼展33 cm,该FWMAV 反应迅速,运动灵活,可以通过扑动和微调扑翼控制飞行模式和方向,实现悬停、转弯和360°翻转等动作。北京航空航天大学研制的同类FW-MAV 重约25 g,也实现了VTOL 及悬停可控飞行[9]。
扑旋翼微型飞行器(Flapping Wing Rotor Micro Aerial Vehicle, FWR-MAV)是在传统仿昆虫或鸟翅的拍动模式基础上,提出的一种将扑翼纵向拍动与旋翼运动优化组合的仿生FWMAV,具有VTOL 及悬停性能[10]。研究发现,扑旋翼比传统扑翼和旋翼的气动升力系数显著提高,比传统扑翼的气动效率也大幅提高[11-12]。扑翼是FWR-MAV 整个系统中至关重要的组成部分,对飞行器的气动性能影响显著,FWR-MAV翼结构与仿昆虫FW-MAV 的翼结构相似[9,12-14],主要由翼梁和翼膜构成,具有一定的柔性。
柔性翼不仅能减小FW-MAV 机体重量、提高驱动效率,而且由于结构柔性导致的扑翼被动变形有利于改善扑翼的气动性能[15-16]。Heathcote 等[17]通过实验研究了扑翼展向刚度对推力、升力和推进效率的影响,研究表明柔性扑翼比刚性扑翼能产生更大的推力,当斯特劳哈尔数Sr>0.2 时,一定程度的展向柔性能提高扑翼的推力系数和效率。高强等[18]采用CFD 方法对不同弦向变形的柔性扑翼进行了数值模拟,结果表明扑翼适度的弦向变形能提高其瞬时升力,但弦向变形过大会造成扑翼瞬时升力减小,不利于扑翼的气动特性。Lin 等[19]通过风洞试验研究了仿鸟类拍动模式的柔性扑翼获得升力和推力的机制,发现在高频拍动时扑翼柔性变形作用更加明显,变形较小的翼根后缘主要产生升力,而翼梢部位翼后缘变形较大主要产生推力。除柔性变形的影响,扑翼形状对升力的产生也至关重要。Nan等[20]通过实验研究了柔性扑翼形状和几何形状对气动性能的影响,发现翼梁布局和展弦比也会对升力和效率产生影响,高展弦比(>9)的梯形扑翼比矩形扑翼具有更高的气动效率。
笔者注意到,之前采用CFD 仿真或实验方法围绕扑翼刚度对气动性能的影响开展了大量研究,但都是以传统拍动模式下的仿生扑翼为研究对象,包括在悬停飞行状态下横向拍动的仿昆虫翅和在前飞飞行状态下纵向拍动的仿鸟翅的扑翼刚度和形状对气动性能的影响[21-23],而对于具有不同拍动模式及气动系数和效率更高的扑旋翼[11-12]刚度分布和形状对气动升力和升力效率的影响尚未开展过细致的研究。
为研究扑旋翼刚度分布和翼梢形状对悬停飞行模式FWR-MAV 气动升力和效率的影响,本文设计、制作和测试了一种可安装有被动扭转角扑旋翼的FWR-MAV,以FWR-MAV 可获得的最大平均升力和升力效率为目标,通过迭代优化的实验方法,研制了12 种不同展向和弦向刚度、翼膜支撑刚度、翼梢刚度及形状的矩形扑翼实验件。通过重物吊挂法测量扑翼刚度,构建了力、功率和运动测试系统捕获扑旋翼运动,测量平均升力和效率。通过比较分析不同扑翼实验件在一定电压范围内对扑旋翼运动、平均升力和效率的影响,确定扑旋翼刚度分布和翼梢形状对气动性能的影响,进而优化扑旋翼结构和外形设计,研制出一种高气动性能的外形仿蜻蜓翅扑旋翼。
1 扑旋翼实验模型和设置
1. 1 FWR-MAV 原理样机
本研究设计和制造的FWR-MAV 原理样机的结构布局见图 1(a),总重30.1 g,由一对反对称布设的重量为5.2 g 的空心杯电机协同驱动,电机额定电压3.7 V,额定转速55 000 r/min,提供足够驱动力的同时满足对拍动频率的需求,设计两级减速齿轮,齿轮减速比为21∶1。拍动杆前端设有基于流固耦合效应的扑旋翼自适应扭转机构见图 1(b),具体细节见图 1(c),扑旋翼翼梁根端依次穿过挡片和扭转件,扭转件固定在距翼根端面一定距离处并安装于角度限位器中,通过螺母将扑翼及角度限位器固定在拍动杆前端,允许扑旋翼绕翼梁轴旋转,旋转角度受角度限位器限制,拍动过程中扑旋翼可被动的扭转。研究表明,输入相同的功率时,扭转角可被动变化的扑旋翼比恒定扭转角的扑旋翼产生的平均升力和效率均高出100%以上[14]。
为更好的描述扑旋翼运动,如图 1(a)和图 1(c)所示,定义惯性坐标系Oxiyizi、扑旋翼坐标系Oxwywzw、机体坐标系Oxryrzr,具体运动如下:通过传动杆将电机转动转换为中心轴沿zr轴方向的线性往复运动,再通过拍-扭运动机构转换为扑旋翼绕yr轴的上下拍动(φ)。拍动过程中由于扑旋翼反对称安装在气动力作用下产生一个以翼对称点为中心的力偶,使扑旋翼在力偶的作用下绕中心轴(zr轴)做旋转运动(ψ)。同时,扑旋翼受气动力和惯性力作用可绕xw轴自适应扭转(θ),扑旋翼的扭转除了刚性自由扭转运动外,还包括扑旋翼自身的弹性变形。
以xiyi平面为水平基准面,拍动角定义为扑旋翼前缘梁与水平面夹角。实验中扑旋翼初始拍动角和扭转角幅度是根据前期扑旋翼实验[14]中设置的50°/-20°拍动角设定的,即扑旋翼旋转水平面以上角幅度为50°,水平面以下角幅度为-20°,总拍动角幅度为70°;总扭转角幅度40°时的升力值最大[3],而平均扭转角20°时扑旋翼的斯特劳哈尔数接近0.3,在最优推进效率范围内[23],故预设角度限位器允许扑旋翼可绕xw轴(翼主梁轴)在0°~40°范围内自由旋转。
值得注意的是,扑旋翼的气动性能与其刚度及设定的拍动模式相关,包括拍动角和扭转角幅度的设定。这是因为扑旋翼的气动升力和效率是以拍动模式为主、柔性变形为辅的综合运动结果。研究在不同拍动模式下扑旋翼刚度和形状对气动性能影响的工作量过大,因此只选定上述接近优化的一个扑旋翼拍动模式开展扑旋翼刚度和翼梢形状对气动性能影响的研究。
各零部件细节和重量如图 1(b)和表 1 所示,该FWR-MAV 原理样机主要构架(黑色)由高性能尼龙材料通过3D 打印制成,中心轴采用铝合金管,齿轮采用POM 材料制成。该模型可安装不同刚度及结构布局的扑旋翼样件开展实验研究,扑旋翼样件细节见1.2 节。

表1 FWR-MAV 模型各组件数据Table 1 Data of FWR-MAV components
1. 2 扑旋翼模型及刚度
1.2.1 矩形翼模型
由于扑旋翼刚度和外形优化迄今尚未建立可循的理论方法,目前扑旋翼的仿真和实验研究基本上采用简单的梁膜结构矩形翼[12-14,23-28],并成功实现VTOL 飞行[14,24],因此,本研究采用如图2 所示的矩形外形作为扑旋翼的初始外形,根据尺度律公式[25]和基于前期对扑旋翼的研究[12-14,23-28]设 定 矩 形 扑 旋 翼 平 面 尺 寸 为156 mm×58 mm,半展弦比2.7。扑翼结构由主梁、次梁及翼膜构成,为了最大化覆盖翼膜面积,并以最短路径将翼膜上的气动力传递到翼根,同时以最小质量代价提供所需的支撑刚度,矩形扑旋翼的初始次梁设计为翼根到翼尖后缘的单梁布置方式(JX-1~JX-5)。进而根据蜻蜓翅脉络分布[29-30],在翼后缘和翼梢处布置细小次梁作为仿蜻蜓翅的简化设计(JX-6~JX-12)。翼主梁、次梁采用相同的碳纤维增强复合材料制作的圆截面杆。翼膜采用聚酰亚胺材料制作的薄膜,厚度为0.015 mm,弹性模量为2.8 GPa,密度为1.4 g/cm3,粘合于扑翼梁上。通过改变翼主梁、次梁的尺寸,翼梁布局及翼梢形状制作了12 种不同刚度分布和外形的矩形扑翼实验件开展扑旋翼刚度和翼梢形状对气动升力及效率影响的研究。
实验件可分为4 组,第1 组仅改变主梁刚度,采用3 种不同直径的主梁制作了如图2 所示的扑翼实验件,编号分别定为JX-1、JX-2 和JX-3,对应的翼主梁直径分别为D=1.2,1.5,1.8 mm,次梁采用相同直径(d=1 mm)的碳杆。
第2 组实验件如图 3 所示,是根据第1 组扑旋翼实验结果优选JX-2 扑翼(主梁D=1.5 mm)进而将次梁直径分别改变为d=0.6,1.2 mm 而制作成的2 个弦向刚度不同的扑翼样件,编号为JX-4 和JX-5。
第3 组实验件如图4 所示,是基于JX-2 扑翼通过在主次梁之外的后缘和翼梢位置添加直径d=0.5 mm 的辅助次梁制作的3 种扑翼样件,包括在次梁与翼后缘之间增设翼后缘次梁的样件JX-6,仅在翼梢增设翼尖次梁的样件JX-7,将JX-6 和JX-7 组合的扑翼JX-8,目的是通过改变翼梁结构分布提高对翼膜的支撑刚度。
第4 组实验件如图 5 所示,对蜻蜓翅的研究[29-30]及对蜻蜓前翅的测量表明蜻蜓前翅形状在约85%~90%展长处翼梢出现连续后弯,平均后掠弯度约35°。因此,基于第3 组实验结果优选JX-8 翼在约86%展长处添加一根后掠角约34°的翼尖后掠短梁(直径D=1.3 mm,搭载主梁处距翼尖22 mm,搭载翼尖次梁处距翼尖15 mm)制成样件JX-9。考虑到扑翼形状也是影响气动特性的重要因素[20],将JX-9 翼梢位置主梁与辅助次梁间的三角区内翼膜剪裁掉,制成如图 5(b)所示的翼梢后掠角约34°的样件JX-10。另外,改变后掠短梁沿翼尖次梁的搭载位置,剪裁掉三角区内的翼膜,制成如图 5(c)和图 5(d)所示的翼梢后掠角分别约为22°和54°的样件JX-11 和JX-12,进而研究扑旋翼翼梢形状对气动性能的影响。
1.2.2 仿生翅扑旋翼模型
如图 6 所示是一个基于JX-1~JX-12 翼的实验结果进一步改进扑旋翼形状研制的仿蜻蜓翅扑旋翼,编号FS。基于几何相似性的设计方法[30],根据蜻蜓前翅放大后的外形、JX-9~JX-12 翼的实验结果及加工制作条件限制确定FS 翼的外形。为保持展弦比、翼面积均与翼JX-10 基本一致,FS 翼设计单翼展长175 mm,最大弦长65 mm,半展弦比2.7。根据仿蜻蜓翅扑翼平面结构拓扑优化结果[30]及JX-1~JX-12 翼的实验结果,且由于前缘主梁在翼梢的后弯为靠近翼梢的翼膜提供了一定的支撑,进而可取代矩形翼翼尖后掠短梁和翼尖次梁的作用,故只采用弦向延伸至后缘的两根次梁为靠近后缘的翼膜提供支撑。翼梁采用厚度1 mm 的碳纤维增强层板通过机加切割成条制作,前缘主梁截面宽度从翼根3 mm 递减至翼梢1 mm,次梁截面宽度1 mm。翼膜为15 μm厚聚酰亚胺膜,粘合于扑翼梁上。
该仿蜻蜓翅扑旋翼具有2 个典型特征:一是前缘主梁仿蜻蜓翅梢形状连续后弯,翼梢端刚度相对大能为翼梢膜提供一定的支撑;二是具有弦长变化的仿蜻蜓翅外形,且翼次梁能为靠近后缘的翼膜提供足够支撑。
1.2.3 扑翼质量及刚度
图2~图6 所示的13 种扑旋翼单个扑翼实验件的质量测量结果见表2。

表2 扑翼实验件的质量Table 2 Mass of flapping wing models
对扑翼弯曲刚度的测量分为展向、弦向和翼梢刚度,包括翼膜支撑的影响。对扑翼主梁展向弯曲刚度的测量方法如图 7 所示,以翼根端固支为坐标系原点,x-y-z 轴分别沿扑翼弦向、展向、垂直翼面向上方向定义。测量主梁展向弯曲刚度时,沿主梁展向不同位置吊挂质量块施加载荷,测量翼梁在加载点处z 轴方向位移,根据悬臂梁变形式(1)计算主梁截面弯曲刚度EI。
式中:F 为加载力;L 为翼根与加载点之间的长度;δ 为加载点处的位移;I为圆形截面的惯性矩。
因扑翼实验件JX-4~JX-10 的主梁材料和尺寸与JX-2 相同,只需测量具有不同主梁尺寸的扑翼实验件JX-1、JX-2 和JX-3 的主梁弯曲刚度即可。考虑测量和翼梁尺寸加工误差,每种扑翼实验件沿主梁展向不同位置的刚度EI 测量3 次取平均值。FS 翼前缘主梁为变截面梁,需测量和计算FS 翼主梁展向不同位置的截面弯曲刚度。上述3 种矩形扑翼实验件的主梁刚度和FS 翼主梁沿展向刚度变化的结果见图8。
由图 8 可见,矩形扑翼主梁展向弯曲刚度恒为常数,FS 翼前缘主梁弯曲刚度从翼根到翼梢呈下降趋势。JX-1 翼主梁弯曲刚度总体小于FS翼,在翼梢处刚度与FS 翼接近。JX-2 和JX-3 翼主梁的弯曲刚度明显大于FS 翼,在翼展70%的位置JX-2 翼主梁的弯曲刚度是FS 翼的1.94 倍,JX-3 翼主梁的刚度是FS 翼的2.54 倍。
扑翼弦向弯曲刚度的测量方法如图 9 所示,首先将扑翼主梁根部固支并采用与图 7 相同的坐标系定义,在扑翼主梁上方间隔2.5 mm 处沿展向安装一根两端固支且略长于扑翼的刚性支撑杆,然后在扑翼主梁的翼根和翼梢两点与刚性支撑杆之间插入并粘接刚性垫片,使刚性支撑杆对平行连接在下面的扑翼主梁起支撑作用,减小翼主梁的展向弯曲和扭转对弦向刚度测量的影响。然后,将一根长度(L=65 mm)略大于翼弦的刚性加载杆(直径2.5 mm 碳杆)的前端沿翼弦方向插入扑翼主梁与刚性支撑杆之间,在刚性加载杆后端延伸出翼面后缘的端点吊挂一质量块,使刚性加载杆搭压在次梁和翼膜上面,测量加载点沿z 轴方向的位移。由于刚性加载杆仅起载荷传递的作用,加载力通过刚性加载杆沿弦向传递到翼面上,由翼次梁、后缘次梁和翼膜共同构成的扑翼在该展向位置上的弦向等效弯曲刚度EI 可根据悬臂梁变形式(1)计算。
将加载碳杆沿扑翼展向(y 方向)不同位置安置后测量弦向等效刚度,采用该方法得到不同扑翼实验件沿展向不同位置的弦向弯曲刚度结果如图 10 所示。从图 10 可知,各扑翼弦向弯曲刚度沿展向位置先减小后增大。矩形扑翼弦向弯曲刚度随着次梁尺寸的增大和结构布局的改变而提高。例如JX-5 翼的次梁直径d=1.2 mm 大于JX-1~JX-3(d=1 mm)、JX-4(d=0.6 mm)、JX-6(d=1 mm)的直径(见图2~图4),其翼根到翼尖的弦向刚度也大于这些翼。当在JX-6 翼尖添加翼尖次梁后,JX-7~JX-10 翼尖处的弦向刚度明显提高。具有后掠短梁支撑的JX-9 和JX-10 翼梢处弦向刚度再次提高,但仍小于前缘主梁连续后弯的FS 翼,在翼展约95%的位置FS翼弦向弯曲刚度约为JX-9 翼的1.25 倍。
1. 3 扑旋翼升力实验
为了研究上述扑旋翼的刚度和翼梢形状变化对气动升力和效率的影响构建了如图11 所示的升力测试系统。将各扑翼实验件分别安装在如图1 所示的FWR-MAV 样机上,FWR-MAV样机通过夹具安装在压力传感器上(SKU-314990000),传感器将压力信号转换为电压信号输出至信号放大器(RW-ST01A)放大,然后通过信号采集卡(NI USB-6009)采集数据,最后将数据传输到PC 端进行数据处理,可得到扑旋翼在竖直方向上产生的力。测试数据采用切比雪夫二阶低通滤波算法处理,低通截止频率设为扑旋翼模型拍打频率的5 倍。力测量系统的有效性在之前的研究[24-25]中得到了验证。在升力测试过程中,通过高清摄像实时记录扑旋翼运动和直流稳压显示的电压和电流量得到拍动频率和输入功率。通过视频逐帧捕获扑旋翼转速测量平均旋转速度。

图1 FWR-MAV 原理样机Fig.1 Principle model of FWR-MAV

图2 采用3 个不同直径主梁的第1 组扑翼实验件JX-1、JX-2、JX-3Fig.2 The first group of flapping wing models using three main beams of different diameters: JX-1,JX-2, and JX-3

图3 采用2 个不同直径次梁的第2 组扑翼实验件JX-4、JX-5Fig.3 The second group of flapping wing models using two secondary beams of different diameters: JX-4 and JX-5

图4 增设辅助次梁提高翼膜支撑刚度的第3 组扑翼实验件JX-6、JX-7、JX-8Fig.4 The third group of flapping wing models with an addition of auxiliary secondary beams to improve support stiffness of wing membrane: JX-6, JX-7 and JX-8
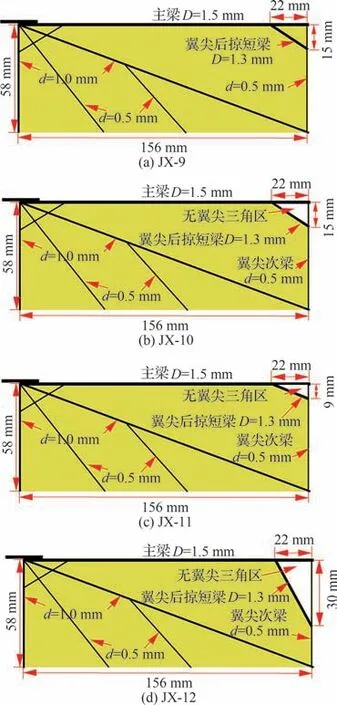
图5 改变翼梢刚度和形状的第4 组扑翼实验件JX-9、JX-10、JX-11、JX-12Fig.5 The fourth group of flapping wing models with altered wingtip stiffness and shape: JX-9, JX-10, JX-11, and JX-12
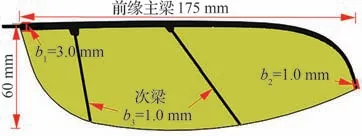
图6 仿蜻蜓翅形状的扑翼FSFig.6 Flapping wing FS imitating dragonfly wings shape
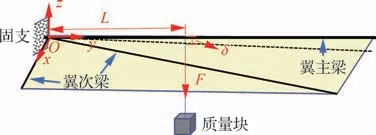
图7 扑翼主梁展向弯曲刚度测量示意图Fig.7 Schematic of measurement of spanwise bending stiffness of flapping wing girder

图8 JX-1、JX-2、JX-3、FS 翼主梁沿展向的弯曲刚度Fig.8 Bending stiffness of wings JX-1, JX-2, JX-3 and FS girder along the span

图9 扑翼弦向弯曲刚度测量示意图Fig.9 Schematic of measurement of chordwise bending stiffness of flapping wing
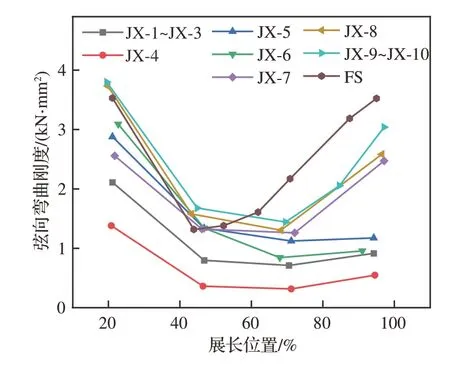
图10 扑翼展向不同位置的弦向弯曲刚度Fig.10 Chordwise bending stiffness of flapping wing at different positions

图11 扑旋翼升力测试系统原理图和实验图Fig.11 Schematic diagram and experimental diagram of FWR model lift measurement system

图12 扑旋翼拍动、扭转和旋转角度随时间的变化Fig.12 Variation of flapping, pitch and rotation angle of flapping wing rotor with time
本实验共测试12 对矩形扑旋翼样件(JX-1~JX-12 翼)和1 对仿蜻蜓翅翼样件(FS 翼),每次测试1 对样件,输入电压变化范围为1.6~3.4 V,增量为0.3 V,共设置7 个输入电压工况,其中JX-10 和FS 翼多增加1 个3.7 V 输入电压工况。实验测量不同输入电压下各扑旋翼样件的拍动频率、转速、平均升力和输出功率。在各个工况下每对扑旋翼样件至少进行2 次升力测试,即JX-10 和FS 翼每对样件至少进行16 次测试,其他11 对扑旋翼每对样件至少进行14 次测试。
实验中选取扑旋翼稳定运动状态进行测试,采样时间10 s,采样率设为1 000 Hz,每个工况测试结束后传输数据到PC 端进行数据处理,测量误差控制在10%以内。若同一工况下2 次实验拍动频率或平均升力结果相差>10%,在相同条件下增加一次实验。在同一工况下的拍动频率、转速、平均升力和效率的数据取2 次相近测试结果的平均值使测量误差<10%。
根据设定的拍动模式制作的FWR-MAV 样机能够确保在驱动机构与翼根连接处的拍动角幅度(+50°/-20°)和扭转角幅度(0°~40°),但扑旋翼在拍动过程中的拍动角速度随输入电压和拍动频率而变化,且由于弹性变形沿展向不同位置也不同。为便于描述扑旋翼运动与作用力间的关系,用图 12 所示的一个理想运动曲线代替实测的运动曲线加以说明。如图 12 所示,扑旋翼在上拍运动的前半周期受到气动力和惯性力在zi方向的向下作用,由于压力中心和质心在主梁后的翼面上(如图 1 所示),由此产生绕扑旋翼主梁的力矩使扑旋翼绕xw轴转动至最大扭转角θ=40°,并在上拍运动的下半个周期基本保持该角度。在扑旋翼达到顶端后的下拍运动中,扑旋翼产生的气动力和惯性力向上(为正)作用在翼面上,使其产生相反方向(低头)转动,在限位器的约束下达到设置的最小扭转角θ=0°。
需要说明的是,基于上述方法和装置的测力结果是包括惯性力和气动升力随时间变化的合力,根据之前对扑旋翼仿真和实验的研究结果表明[14],扑旋翼在一个周期内的上拍运动产生的惯性力与下拍产生的惯性力基本抵消,使平均惯性力接近零。因此,一个拍动周期内平均升力近似等于平均气动力。为直接与模型重量相比较,将升力转换成克(g)为单位在平均升力和效率图中显示结果。实验以达到FWR-MAV 模型总重量(30.1 g)的平均升力值作为扑旋翼优化的主要指标,设模型在单位输入功率下产生的平均升力为模型的升力效率,整个模型系统的输入功率包含电机、减速齿轮、扑旋翼机构以及克服扑旋翼惯性力和气动阻力的损耗所需的功率。根据平均升力和效率对扑旋翼的气动性能进行定量分析评估。
2 实验结果与分析
2. 1 扑旋翼刚度和翼梢形状对气动性能的影响
2.1.1 展向刚度
采用上述FWR-MAV 样机和测量方法,具有不同的主梁尺寸和展向弯曲刚度的扑旋翼JX-1、JX-2 和JX-3 在1.6~3.4 V 输入电压下产生的拍动频率、转速、平均升力和效率测量结果如图 13 所示。从图13 (a)和图13 (b)可知,3 种扑旋翼的拍动频率和转速随着输入电压增加而提高。在相同的输入电压下,3 种矩形扑旋翼的拍动频率相近;随着输入电压增加,扑旋翼的转速随着主梁展向弯曲刚度的增大而提高。结果表明,在低电压和低频率时(2.5 V 和9 Hz 以下)扑旋翼展向刚度的增加对扑旋翼转速的影响可忽略,但 在 大 于2.5 V 和10 Hz 时,JX-2 和JX-3 扑旋翼的转速明显大于JX-1 翼,换言之,这时扑翼展向刚度有助于提高扑旋翼转速。
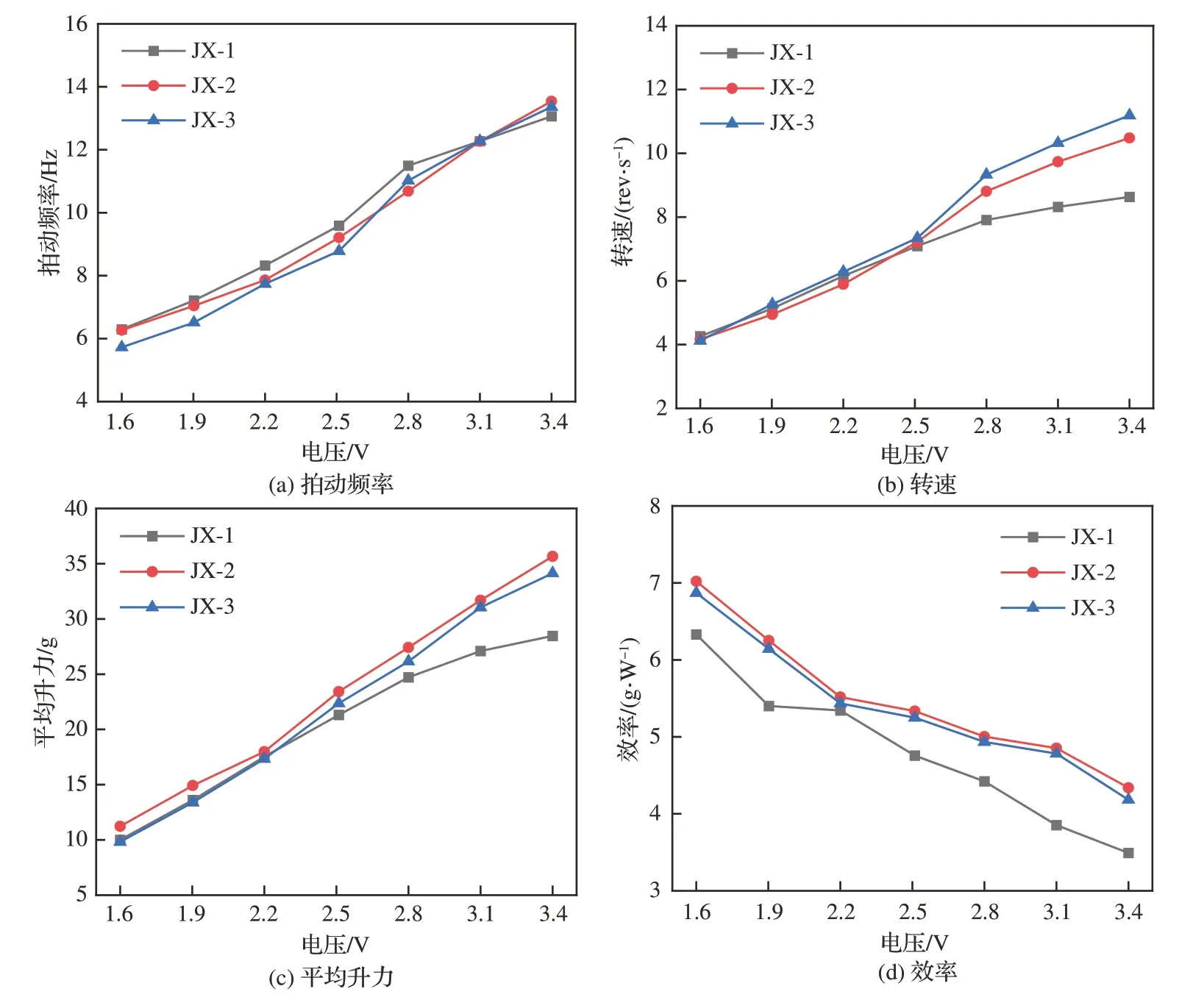
图13 展向刚度对拍动频率、转速和气动性能的影响Fig.13 Effect of spanwise stiffness on flapping frequency, rotary speed and aerodynamic performance
图13(c)和图13 (d)表明,JX-1、JX-2和JX-3翼平均升力和效率总体变化趋势一致。在整个输入电压范围内,JX-2 翼产生的平均升力和效率比JX-1 和JX-3 翼略高,例如,在3.4 V 时,JX-2 翼的平均升力(35.7 g)和效率(4.3 g/W)分别比JX-1翼(28.5 g,3.5 g/W)高出1.25 倍和1.23 倍。这说明,优化扑旋翼的展向刚度有助于提高平均升力和效率,因为适度的展向刚度有助于保持既定的优化拍动模式(拍动角与扭转角组合),防止过量弯曲变形导致翼前缘涡的脱落和翼梢运动滞后。
考虑到扑翼气动升力和效率受展向和弦向弯曲刚度的共同影响[15-16,18],于是在优选JX-2 翼主梁的基础上制作了其它弦向刚度不同的扑翼,为研究弦向刚度对扑旋翼气动特性的影响提供了实验样件。
2.1.2 弦向刚度
在同样的输入电压范围内对相同主梁和不同次梁的JX-2、JX-4 和JX-5 翼进行实验,测得的拍动频率、转速、平均升力和效率结果如图 14 所示。图14 (a)和图14 (b)表明,弦向刚度最小的JX-4 翼的拍动频率和转速明显高于JX-2 和JX-5翼;当电压达到3.4 V 时,JX-4 翼的拍动频率(16.2 Hz)比JX-5 翼(12.5 Hz)大1.3 倍。结果还表明,弦向刚度对扑旋翼的推力和转速影响大于展向刚度,优化扑旋翼弦向刚度有助于提升扑旋翼拍动频率和旋转速度。
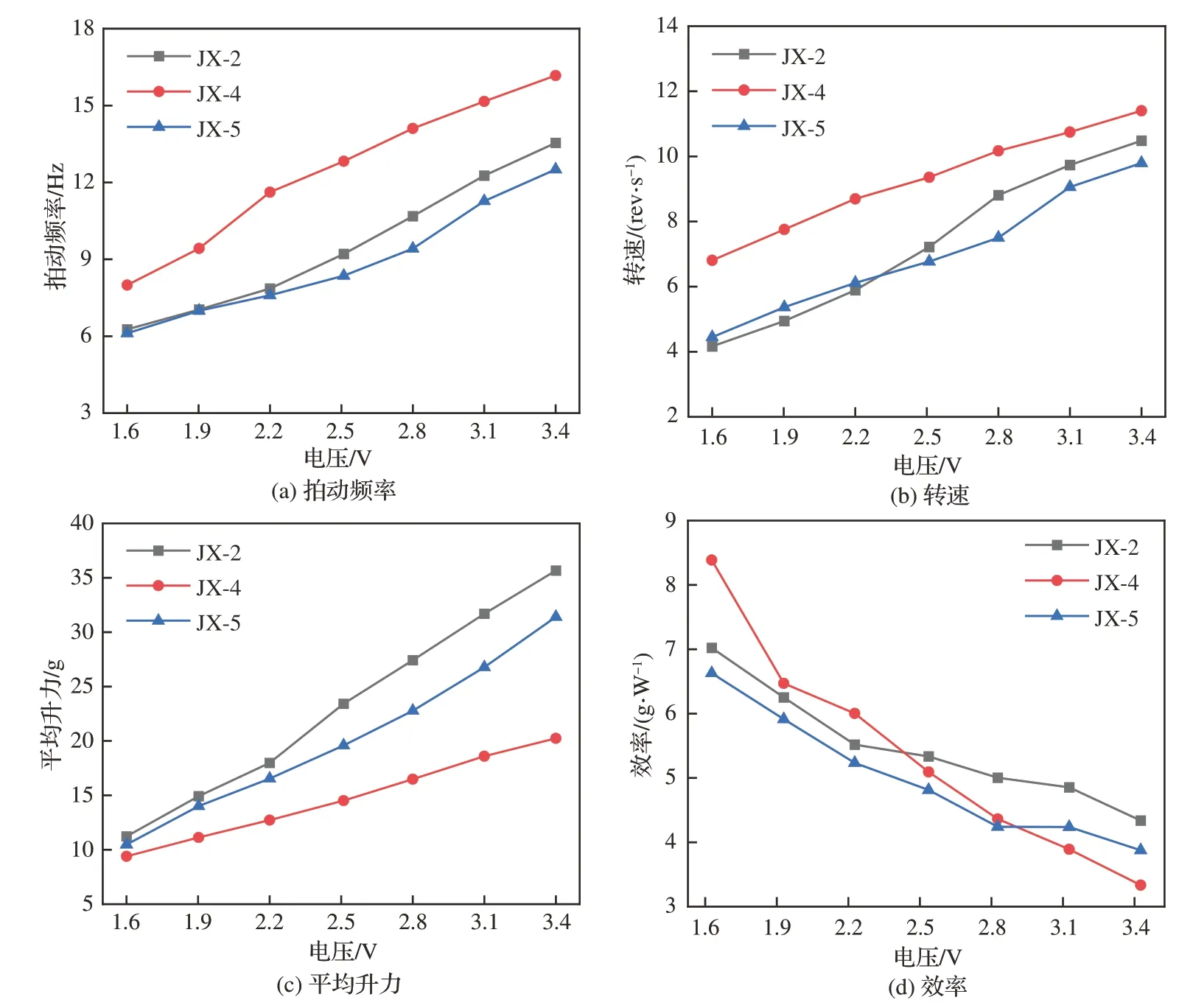
图14 弦向刚度对拍动频率、转速和气动性能的影响Fig.14 Effect of chordwise stiffness on flapping frequency, rotary speed and aerodynamic performance
如图14 (c)所示,尽管JX-4 翼的拍动频率最大,转速也大于JX-2 和JX-5 翼,但产生的平均 升 力 却 最 小,与JX-2 翼 相 比,JX-4 和JX-5 翼弦向刚度的增减使平均升力减小。这主要是因为弦向刚度减小的JX-4 翼的弦向柔性变形改变了扑旋翼扭转角使平均攻角减小,功率更多的用于提高扑旋翼的推力而导致拍动频率和转速提高,按照能量守恒原理,用于产生升力的功率减少导致升力下降,但转速的提高可能导致气动效率提高。如图14 (d)所示,JX-4 翼在输入电压1.6 V 时的升力效率高达8.4 g/W,明显高于JX-2 和JX-5 翼,但随着输入电压提高,JX-4翼的升力效率最终减小到低于JX-2 和JX-5 翼。结果表明,随着输入电压和拍动频率的提高而相应增加扑旋翼弦向刚度有利于平均升力和效率的提高。
图14还表明,到目前为止的矩形扑旋翼实验中,JX-2 翼产生的平均升力和效率仍然最大。与蜻蜓翅纵横交错的翅脉相比[29],JX-2 翼的次梁分布简单,对后缘和翼梢的翼膜支撑刚度较小。因此,在JX-2 翼基础上添加辅助次梁加强对翼膜的支撑,研制了改变结构布局的扑翼实验 件JX-6、JX-7 和JX-8 翼,继 续 通 过 实 验 分 析提高翼膜支撑刚度对扑旋翼运动和气动特性的影响。
2.1.3 翼膜支撑刚度
在相同的输入电压下,JX-6、JX-7 和JX-8翼的拍动频率、转速、平均升力和效率实验结果如图 15 所示。图15 (a)和图15 (b)显示,提高翼膜支撑导致扑旋翼的拍动和转速结果基本一致,但均低于JX-2 翼。如图15 (c)和图15 (d)所示,JX-6、JX-7 和JX-8 翼的气动结果也相近,当电压小于2.2 V 时升力和效率低于JX-2 翼;随着输入电压的升高,JX-2 翼的升力和效率与这3 种翼接近。当电压提高到3.4 V 时,JX-7 和JX-8 翼的平均升力和效率才略大于JX-2 翼,例如JX-8 翼的平均升力和效率(39.0 g,4.9 g/W)比JX-2 翼(35.7 g,4.3 g/W)分别提高3.3 g 和0.6 g/W。结果表明,提高翼膜后缘的支撑对扑旋翼的拍动频率、转速、升力和效率没有明显影响,加强翼梢膜的支撑更利于扑旋翼的气动性能提升。

图15 翼膜支撑刚度对拍动频率、转速和气动性能影响Fig.15 Effect of membrane support stiffness on flapping frequency, rotary speed and aerodynamic performance

图16 翼梢刚度和形状对拍动频率、转速和气动性能的影响Fig.16 Effects of wingtip stiffness and shape on flapping frequency, rotary speed and aerodynamic performance
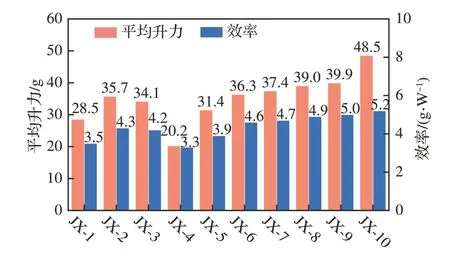
图17 输入电压3.4 V 时10 种扑翼实验件气动性能对比Fig.17 Comparison of aerodynamic performance of 10 flapping wing models with input voltage of 3.4 V

图18 扑翼刚度分布和翼梢形状对气动升力和效率的影响Fig.18 Effects of flapping wing stiffness distribution and wing tip shape on aerodynamic lift and efficiency
JX-8 翼气动性能在3.4 V 时比JX-2 翼有所提升,考虑到矩形扑旋翼提高翼梢的翼膜支撑对气动性能的有利作用以及蜻蜓翅梢后弯形状和对翅梢膜的支撑,在JX-8 翼基础上添加翼梢辅助次梁和剪裁翼梢膜制作了翼JX-9、JX-10、JX-11和JX-12,通过实验分析翼梢刚度和形状对气动性能的影响。
2.1.4 翼梢刚度和形状
在相同输入电压下,JX-8、JX-9、JX-10、JX-11 和JX-12 翼的运动和气动特性实验结果如图 16 所示。从图 16 可见,在实验覆盖的输入电压范围内,翼JX-9 和JX-8 的拍动频率和转速相 近,均 低 于JX-10、JX-11 和JX-12 翼。例 如在输入2.5 V 电压时,JX-10 翼的拍动频率(11.0 Hz)和 转 速(9.1 rev/s)分 别 比JX-9 翼(7.8 Hz,5.9 rev/s)提高41.0%和54.2%。这说明仅增强翼梢刚度对扑旋翼拍动频率、转速及升力的影响可忽略,但采用仿生翼梢后掠形状同时增强翼梢刚度的扑旋翼产生的拍动频率、转速和升力有明显提高,其中仿蜻蜓翅梢后掠角34°的扑旋翼(JX-10 翼)产生的拍动频率、转速和升力最大。

从图 16(d)可见,当输入电压大于2.2 V 时,JX-9 翼的平均升力和效率略高于JX-8 翼,在输入电压1.6~3.1 V 范围内,JX-10 和JX-11 翼的平均效率显著高于其它翼,JX-12 翼效率只在1.6~1.9 V 和2.4~2.8 V 时略高于JX-9 翼,但JX-10、JX-11 和JX-12 翼的效率均在电压大于2.8 V 后明显下降。在整个实验输入电压范围内,JX-10 翼具有最佳的气动性能。例如,在电压2.8 V 时,JX-10 翼的平均升力(36.5 g)和效率(6.0 g/W)比JX-8 翼(25.6 g,4.8 g/W)分别提高42.5%和25%。
2.1.5 刚度分布和翼梢形状与气动性能的关系
矩形扑旋翼JX-1~JX-10 在输入电压3.4 V(接近电机3.7 V 额定电压)时的平均升力和效率的测量结果如图 17 所示。对比JX-1~JX-5 这5 种扑旋翼实验件的气动性能结果表明,JX-2 翼的平均升力(35.7 g)和效率(4.3 g/W)最高,已经大于本实验采用的FWR-MAV 样机的总重量(30.1 g)。基于JX-2 改进结构布局和翼梢形状得到的JX-6~JX-10 翼的气动性能继续提高。相比JX-6~JX-9 翼的实验结果,最终改进研制的JX-10 翼的气动平均升力和效率提高到48.5 g 和5.2 g/W,比原始扑旋翼JX-1(28.5 g,3.5 g/W)分别提高了70.1%和48.5%,比气动性能最低的JX-4 翼(20.2 g,3.3 g/W)提 高 约140% 和57.5%。
为进一步分析扑翼刚度分布和翼梢形状对扑旋翼气动性能的影响,选取扑翼在20%、45%、75%和95%展长位置的展向和弦向弯曲刚度的平均值作为扑翼展向和弦向的等效刚度。从图 18 可知,扑翼弦向等效刚度(1 130 N·mm2)一定,随着展向等效刚度从13 600 N·mm2(JX-1翼)增加到29 400 N·mm2(JX-2 翼)后继续提高到38 500 N·mm2(JX-3 翼),展向刚度与弦向刚度比值(展弦向刚度比)由12 提高至26 后增加到34,气动性能先提高后降低,展弦向刚度比为26的JX-2 翼气动性能最高。将JX-2 翼弦向等效刚度 分 别 降 至650 N·mm2(JX-4 翼)和 增 加 到1 850 N·mm2(JX-5 翼),展弦向刚度比分别提高至45 和降到15.9,展弦向刚度比为26 的JX-2 翼的气动性能依然最高。这说明通过改变翼梁尺寸优化扑翼的展向和弦向刚度对于提高扑旋翼的气动性能相当重要。
通过加强对扑翼后缘和翼梢膜的支撑可将JX-2 翼的弦向刚度从1 130 N·mm2提高到2 450 N·mm2,展弦向刚度比由26 降至12,得到JX-9 翼的平均升力和效率分别达到39.9 g 和5.0 g/W,气动性能进一步得到提高。进而,仿蜻蜓翅梢后弯形状制作的JX-10 翼的平均升力和效率(48.5 g,5.2 g/W)比JX-9 又分别提高8.6 g和0.2 g/W。结果表明,通过优化刚度分布提高扑翼后缘和翼梢膜的支撑及采用仿蜻蜓翅翼梢形状可进一步提高扑旋翼的气动性能,展弦向刚度比为12 且具有仿蜻蜓翅梢后掠角34°的扑旋翼JX-10 气动性能最佳。
2. 2 仿生扑旋翼的气动特性分析
2.2.1 仿生扑旋翼FS 的气动结果
基于扑旋翼刚度分布和翼梢形状对气动性能的影响分析,研制改进的仿蜻蜓翅扑旋翼(FS)如图6 所示。在1.6~3.7 V 输入电压下FS 翼的拍动频率为6.1~17.5 Hz,由此产生的平均升力和效率的实验结果如图19 所示。

图19 FS 翼在不同拍动频率下的平均升力和效率测量结果Fig.19 Average lift and efficiency measurements of FS wing at different flapping frequencies
图19(a)表明仿生扑旋翼FS 的平均升力随着拍动频率呈线性增加,与矩形扑旋翼的变化趋势相同。在输入电压3.7 V 时的拍动频率为17.5 Hz,所产生的平均升力达到52.9 g,达到了FWR-MAV 模型总重量(30.1 g)的1.75 倍,表明了FWR-MAV 模型实现负载垂直起飞的可行性。图 19(b)表明,仿生翼FS 效率随着拍动频率的增加从9.0 g/W 下降到5.2 g/W,这主要是因为较高的拍动频率需要克服更大的惯性力从而需要更多的功耗导致效率下降。与之前单电机驱动的扑旋翼样机实验研究相比[12,26-28],在相同的拍动频率下,采用双电机协同驱动及扭转角可被动变化的仿生翼FS 可产生更大的平均升力和效率。
2.2.2 仿生翼FS 与矩形翼JX-10 的气动性能对比
将仿生扑旋翼FS 与矩形扑旋翼JX-10 在1.6~3.7 V 输入电压范围内产生的拍动频率、转速、平均升力和效率结果进行对比如图20 所示。从图 20(a)和图 20(b)可见,在输入电压小于2 V 时,略轻的JX-10 翼比FS 翼的拍动频率略高,但随着输入电压增加,FS 翼的拍动频率逐渐高于JX-10 翼,并且随着电压增加这种趋势更加明显。同时,在相同输入电压下,FS 翼的转速始终高于JX-10 翼。例如,输入电压3.7 V 时,FS翼的拍动频率(17.5 Hz)和转速(15.4 rev/s)比JX-10 翼(15.3 Hz,13.0 rev/s)分 别 提 高 约14.3%和18.4%。结果说明,弦向刚度相对大和具有仿生翼FS 比矩形扑旋翼产生的推力更大。

图20 FS 翼与JX-10 翼拍动频率、转速和气动性能对比Fig.20 Comparison of flapping frequency, rotary speed and aerodynamic performance between FS wing and JX-10 wing
图20(c)表明,随着输入电压增加,仿生FS翼与矩形JX-10 翼的平均升力的差值先增大后减小。例如,在输入电压2.0~3.4 V 下的FS 翼平均升力略高,其中在电压3.4 V 时FS 翼的平均升力(49.6 g)比JX-10 翼(48.5 g)高1.1 g,但在电压3.7 V 时,JX-10 翼的平均升力(56.4 g)比FS翼增加了3.4 g。图 20(d)表明,在输入电压低于3.7 V 时,FS 翼的效率明显高于JX-10 翼。例如在输入电压1.9V 时,FS 翼的效率(8.7 g/W)比JX-10 翼(6.1 g/W)高2.6 g/W,但在输入电压大于2.8 V 后明显下降。在电压3.7V 时,FS 翼的效率(5.2 g/W)与JX-10 翼(5.1 g/W)几乎相等。结果说明,通过矩形扑旋翼在结构分布和形状上向仿生翅的演变可大幅提高扑旋翼的气动升力,但随着电压和升力的提高,如何保持扑旋翼的气动效率尚有待进一步研究。
2. 3 扑旋翼的动态力分析
为理解扑旋翼产生高升力和效率的机理,对仿生翼FS 和矩形翼JX-10 扑旋运动产生的总力(包括升力和惯性力)进一步分析。FS 翼和JX-10 翼在相同输入电压(3.7 V)或相同拍动频率(15.3 Hz)时拍动产生的总力随时间的变化(取0.25 s)实验结果如图21 所示,其中0 s 时刻的力对应扑翼从最下端开始上拍运动的起始点。因测量结果包括了拍动机构和扑旋翼的惯性力以及产生的气动力,故称为总力。
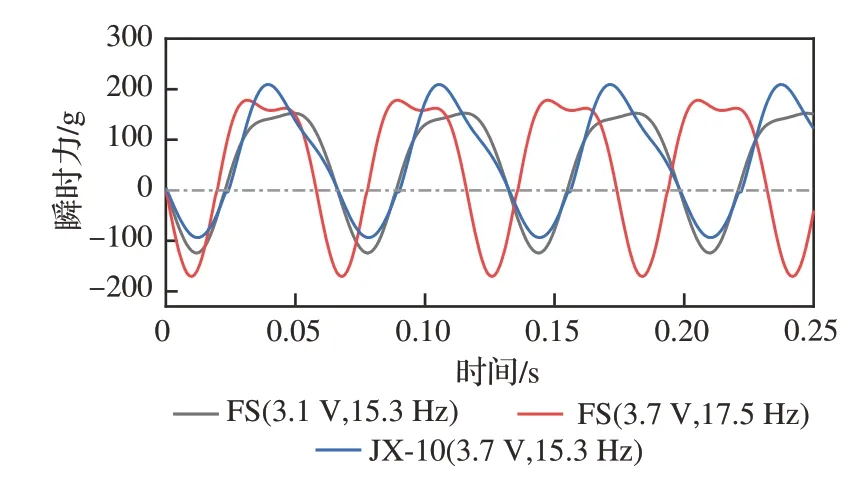
图21 FS 翼与JX-10 翼的动态力Fig.21 Dynamic force of FS wing and JX-10 wing
从图 21 可见,在拍动频率15.3 Hz 时,FS 翼的瞬时总力正、负峰值分别为146.2 g 和-124.2 g,平均升力约46 g。与FS 翼相比,相同拍动频率下,JX-10 翼有相对大的力正峰值(209.2 g)和较小的力负峰值(-93.7 g),故平均升力(56.3 g)比FS 翼大10.3 g。在相同的输入电压3.7 V 下,JX-10 翼的拍动频率比FS 翼略低,而瞬时力的正峰值比FS 翼(178.1 g)大31.1 g,负峰值比FS 翼(-170.8 g)小77.1 g,因此其平均升力(56.3 g)略大于FS 翼的平均升力(52.9 g)。此时,JX-10 翼的升力效率也与FS 翼几乎相同。值得注意的是,仿生翼FS 在下拍的短暂瞬间产生的升力曲线具有双峰值特征,尽管双峰值可以使相对大的正升力维持相对长的时间而有利于提高平均升力,但最大升力值的减小抵消了部分平均升力;而矩形翼JX-10 产生的具有单峰特征的最大正升力明显更大,同样使平均升力提高。
根据图 21 显示的结果和前期研究中采用CFD 方 法 对 扑 旋 翼 和 蜻 蜓 翅 的 流 场 分 析[24,31-32]可对仿生翼FS 和矩形翼JX-10 产生高升力的机理做进一步分析。前缘附着涡是仿生扑翼在小雷诺数下相比固定翼和旋翼的气动升力系数有显著提高的主要因素之一,扑旋翼和蜻蜓翅类似,在上拍过程中以大攻角拍动以减小负升力,在下拍时则以较小攻角或负攻角拍动,伴随着下拍时的加速运动气流在翼前缘上表面形成前缘涡并短暂附着,扑旋翼产生的气动升力达到峰值。于此同时,翼上下表面的压差不可避免的产生翼尖涡,前缘涡随着扑旋翼的拍动和转动向翼后缘和翼梢移动,导致前缘涡与翼尖涡在下拍的前1/4 周期内在接近翼梢处连为一体(见文献[24]中图14 和文献[31]中图 15~图 16),对前缘涡附着的稳定性和时间以及扑旋翼的平均升力均有所提高,这是小展弦比扑翼高升力系数的另一个主要因素。因此,扑旋翼的翼梢形状对前缘涡与翼尖涡的耦合及提高升力尤为重要。与具有翼梢固定后掠角度的矩形翼JX-10 相比,具有连续后掠翼梢形状的FS 翼更有助于前缘涡与翼尖涡的耦合及长时间附着,使气动升力和效率进一步提高。
将图 21 中的FS 翼和JX-10 翼在输入电压3.7 V 时测出的总力变化曲线做傅里叶变换(FFT),得到图 22 所示的总力信号频谱图。由图 22 所见,FS 翼和JX-10 翼总力的频谱均存在明显的双峰值,JX-10 翼的峰值对应的频率为15.3 Hz 和30.5 Hz,FS 翼的峰 值 对应的频 率 为17.5 Hz 和34.9 Hz。
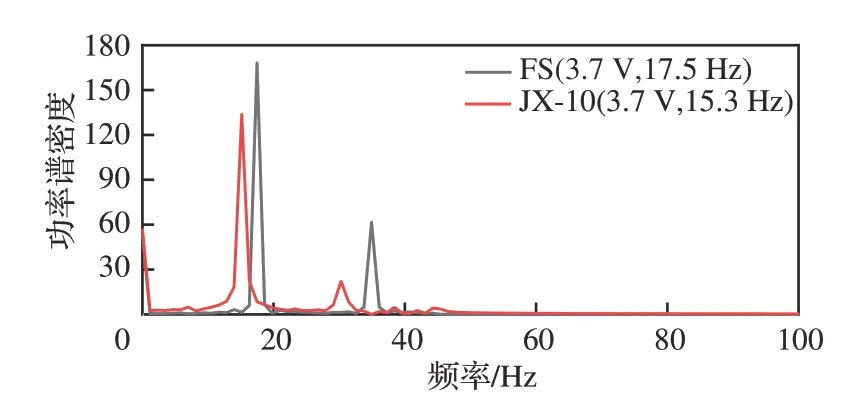
图22 FS 翼与JX-10 翼对应3.7 V 的动态力频谱分析Fig.22 Spectrum analysis of dynamic force for FS wing and JX-10 wing in case of 3.7 V
频谱分析结果显示,2 个翼的第2 阶频率是基频的一倍,基频的功率谱峰值数倍于第2 阶频率对应的峰值。由图 22 和图 20(a)的结果可见,JX-10 翼和FS 翼的基频均与各自输入的拍动频率相同,也是2 个翼各自产生的气动升力和惯性力变化的频率。另外,在扑翼下拍的半个周期中,扑翼的运动由加速变为减速,惯性力由正变负;在上拍的后半个周期中重复加减速过程,但惯性力由负变正。由于实验模型的电机通过图 1所示的齿轮和传动连杆机构驱动扑翼运动,随着扑翼的惯性力在下拍过程中由正变负,相应的气动升力也由大变小,电机的输入力矩由正变负,传动连杆的受力由推力变为拉力,对连接电机底座的机体的作用力也由负变正。在完成上下拍动的一个周期内,该惯性力对机体产生的作用力的变化频率是拍动频率的一倍,这是图 22 中出现第2 阶频谱的原因。与该高阶频谱相关的机电效率是另一个正在研究的问题。
3 结 论
通过迭代对比实验的方法定量研究了与传统仿昆虫扑翼的拍动模式和气动特性明显不同的扑旋翼的刚度分布和翼梢形状对其悬停飞行模式运动、气动升力和气动效率的影响,提出了一种气动性能大幅提高的仿生扑旋翼,为扑旋翼的优化设计提供了研究思路,对于推进仿生微型飞行器的应用起到促进作用。得出以下主要结论:
1) 当拍动频率>10 Hz 时,提高弦向刚度和增强翼梁对翼后缘和翼梢膜的支撑有利于提高扑旋翼的推力和转速,优化展向刚度与弦向刚度的比值并采用仿蜻蜓翅梢后掠形状可大幅提高扑旋翼的气动推力、升力及效率。实验结果表明,展弦向刚度比值为12 且采用仿生翼梢后掠角34°的矩形翼(JX-10)的气动性能最佳。
2) 具有仿蜻蜓翅梢连续后掠角外形的扑旋翼(FS)的气动升力和效率比翼梢后掠角固定的JX-10 翼有进一步提高。例如FS 翼在输入电压2~3.5 V 范围内的平均升力均大于JX-10 翼,气动效率则在1.6~3.5 V 均明显大于JX-10 翼;但在3.7 V 电压时JX-10 翼的升力略大于FS 翼,而气动效率接近相等。另外,在输入电压2.8 V 时,JX-10 翼和FS 翼对应的拍动频率分别为12.2 Hz和13.8 Hz,而两个仿生扑旋翼产生的平均升力分别达到了36.5 g 和42.2 g,效率达到6.0 g/W 和7.1 g/W,表明输入电压>2.8 V 时采用JX-10 翼或FS 翼均可使扑旋翼实验模型(重30.1 g)实现负载垂直起飞。
3) 通过优化刚度分布和翼梢形状的矩形翼JX-10 和仿生FS 翼均使下拍过程的正升力峰值增加而上拍过程的负升力峰值减小进而提高平均升力。两个扑旋翼的惯性力和气动力变化频率与各自的拍动频率保持一致,而本实验模型中电机驱动力的变化频率是扑旋翼拍动频率的一倍。
