北斗L/C 双波段导航信号调制方式及性能评估
2023-07-28倪育德易茉涵刘瑞华
倪育德,易茉涵,刘瑞华
中国民航大学 电子信息与自动化学院,天津 300300
目前L 波段(1 164~1 610 MHz)集中了卫星导航系统的大量信号[1],这些信号的中心频点完全重合或非常接近,各系统间的射频干扰不可避免,引起导航信号的兼容性问题[2]。北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)在现有L 波段资源中的占有率明显处于劣势[3],开发新频段是解决上述问题的主要手段。
在2000 年召开的世界无线电通信大会期间,C 波段中的CN频段(5 010~5 030 MHz)被分配给导航卫星下行信号使用[4]。CN波段信号具有很多优点,其中较少的频谱干扰和较低的电离层误差尤为显著,但总共20 MHz 的带宽对发射信号功率有着非常严格的限制。
与单一频点的卫星导航相比,多频系统可以缩短模糊度初始化时间,有效提高定位精度及可靠性,已成为高精度卫星导航的发展方向[5]。然而,当前多频卫星导航仍局限于L 波段内多频。尽管单独使用C 波段信号难以超越L 波段信号的导航性能[6-8],但C 波段与L 波段的大间隔双频段联合使用不仅可以提高信号伪码测距精度和授时性能,消除频变误差,还可以增加卫星导航服务的多样性,引入新业务[9]。此外,当部分频点受到干扰时,多频信号仍可正常工作。可以预测多波段导航将成为下一代高精度卫星导航系统的关键技术之一。
2008 年,欧洲宇航防务集团的Schmitz-Peiffer 等总结了C 波段基线信号结构的决策过程[10],提到Galileo 研究小组曾将升余弦(Raised Cosine,RC)和 最 小 频 移 键 控(Minimum Shift Keying,MSK)等众多信号列为C 波段候选导航信号,但RC 时域波形并不具备恒包络特性,经高功率放大器后很容易造成非线性失真,而MSK 无法满足C 波段严格的兼容性约束。同年,该研究小组成员在全面分析C 波段全球导航卫星系统(Global Navigation Satellite System,GNSS)信号调制后,提出将高斯最小频移键控(Gaussian Minimum Shift Keying,GMSK)作为Galileo 导航系统精度与鲁棒服务以及公共特许服务的信号基线[11]。GMSK 虽然具有较好的频谱抑制能力,但高斯滤波器加大了接收机处理复杂度,且无法实现跟踪性能最优。在对C 波段导航展开研究的同时,国外也有许多学者提出L/C双波段导航的可能性。2002 年,慕尼黑联邦武装部队大学的Irsigler 等分析了C 波段用于卫星导航的优缺点,并在结论部分设想未来或许可以将C 波段和L 波段信号进行结合[12];2008 年,欧洲航天局分析了未来GNSS 卫星携带L 波段和C 波段载荷的潜在优势,以及将这2 个波段信号在硬件上结合的可实现性[10];同年,慕尼黑工业大学的Henkel 等将L 波段和C 波段进行联合编码和载波相位线性组合,有效抑制电离层延迟误差[13]。
国内对C波段导航的研究起步稍晚。2012年,清华大学的朱亮等针对北斗系统C 波段信号设计问题,提出基于椭圆球面波函数的信号设计方案[14];2016 年,上海交通大学的刘美红将最小频移键控脉冲二进制编码符号(Minimum Shift Keying-Binary Code Symbol,MSK-BCS)调 制用于C 波段导航[15];2019 年,华中科技大学的夏轩提出一种基于相位调制的高谱效恒包络调制技术[16],通过将I、Q 支路相对时延和码片波形联合优化来降低信号带外功率。近年来,国内也有一些研究将目光聚集在多波段导航。2014 年,上海交通大学牛满仓对L、C、S 频段GNSS 系统内和系统间信号进行兼容评估[17],并分析了MSKBCS 在C 频段、一般化二进制偏移载波调制在S 频段的兼容性表现;2018 年,哈尔滨工程大学的孙岩博等[18-19]建立L、S 和C 波段多频测量值组合模型,设计连续相位调制(Continuous Phase Modulation,CPM)在不同波段中的实现方案。
可以看出,国外C 波段导航的理论体系较为成熟,但对L/C 双波段导航的研究很少,研究的公开报道都停留在2010 年以前,且并未深入到调制方式的研究;国内虽有双波段导航的研究报道,但调制方式还在初步探索阶段,仍有大量挖掘空间。
信号调制方式可分为有记忆调制和无记忆调制。目前L 波段GNSS 调制方式均为无记忆的,主要有二进制相移键控(Binary Phase Shift Keying,BPSK)、正交相移键控、二进制偏移载波(Binary Offset Carrier,BOC)及其衍生方案和复用BOC 调制技术。无记忆调制中相邻码元的跳变会引起信号的相位突变,导致信号功率谱旁瓣较大,难以满足C 波段导航严格的带外功率限制[20]。而有记忆调制中的CPM 调制由于相位连续、旁瓣衰减快、频带利用率高等优点成为L/C双波段导航信号调制的首选。
2002 年,加拿大韦仕敦大学的Tasadduq 和Rao 将正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)引入CPM[21],利用CPM 的相位相关性降低OFDM 的误码率。目前,有关OFDM-CPM 联合调制技术的研究大多集中于接收机性能优化,如降低误码率、峰均比等,还未发现有关卫星导航使用该调制方式且进行导航性能评估研究的公开报道。
鉴于GNSS 信号主要集中在频谱资源紧张的L 波段,其带内干扰和带外发射会对同波段信号与服务的工作质量产生较大影响,L 波段无线频谱兼容性问题十分突出;C 波段与微波着陆系统(Microwave Landing System,MLS)频段和射电天文业务(Radio Astronomy Service,RAS)频段相邻,易产生频谱干扰,因此C 波段导航信号功率必须具有较少的频谱泄露和较低的带外辐射,其狭窄的带宽更是对信号的频带利用率有着极高要求。因为目前L 波段调制方式已经固定,若要在L/C 波段上增加新调制信号用于双波段导航,为降低多模接收机的设计复杂度,探索一种频谱性能更佳的通用调制方式更具现实意义。OFDM 信号各子载波之间的正交性允许子信道的频谱相互重叠,可以最大限度利用频谱资源;CPM 的相位连续性使信号带外辐射低,对邻道干扰较小,频谱利用率高,因此二者结合的OFDM-CPM 联合调制方式无疑与L/C 波段信号的频谱要求十分契合。在性能方面,OFDM 具有优良的抗多径衰落能力;CPM 相位连续的特点使相邻OFDM 符号之间具有相关性,降低了OFDM-CPM 系统的误码率,其恒定包络可使功率放大器工作在饱和状态,功率利用率更高;该联合调制方式可以灵活调整子载波的功率和频点分布,易与其他系统兼容,具备多波段和多频点的部署能力。因此本文提出将OFDM-CPM 联合调制应用于L/C 北斗卫星导航系统。
根据OFDM-CPM 信号功率谱特性,初选出调制指数h=0.5、关联长度L 与OFDM-CPM 符号 数 一 致 的“OFDM-CPM(15)”和“OFDMCPM(10)”信号,分别作为BDS L 波段和C 波段的导航信号,然后对其基础导航性能指标,如兼容性、码跟踪精度、抗多径性能等进行评估,最后通过仿真结果对比分析得出所选信号的优势,为未来BDS L/C 双波段导航信号体制的设计提供新的选择。
1 OFDM-CPM 信号模型及L/C 波段导航信号初选
1. 1 CPM 调制
CPM 调制是一类参数可配置调制方案的总称,具有包络恒定、相位连续、功率和频带利用率高等优点,尤其适用于采用非线性功率放大器的卫星导航系统[22]。
CPM 的时域表达式为[23]
式 中:E 为符号能量;T 为符 号 周 期;fc为 载 波 频率;φ0为初始相位; α=[ αi]=[ α0,α1,… ]为发送的M 进制的信息序列;φ(t,α)为t 时刻携带信息的载波相位函数。
φ(t,α)第n 个符号间隔的表达式为
式 中:αi∈{±1,±3,…,±(M-1)},M 为 进 制数;hi为调制指数,一般取有理数,令hi=p v(p,v为互质整数);q(t)为相位脉冲函数。
q(t)是一个连续单调函数,即
式中:L 为关联长度;g(t)为频率脉冲函数。虽然g(t)是不连续的,但对其积分q(t)却是连续的,这也决定了调制信号相位φ(t,α)的连续性。
如果对所有的i,均有hi=h,即调制指数对所有符号是固定的,则称该CPM 为单一调制指数CPM(Single-h CPM);反之,若调制指数从一个符号到另一个符号发生变化,则为多重调制指数CPM(Multi-h CPM)。若无特殊说明,CPM一般都指Single-h CPM。
1. 2 OFDM-CPM 联合调制
OFDM-CPM 联合调制系统实现框图如图1所示。图1 中,bi(i=0,1,…)是传输速率为1 Tb的输入比特序列,经过串并转换后成为数据块ak,p,每个数据块的大小和子载波数均为N,数据块个数(也称“符号数”)为M。
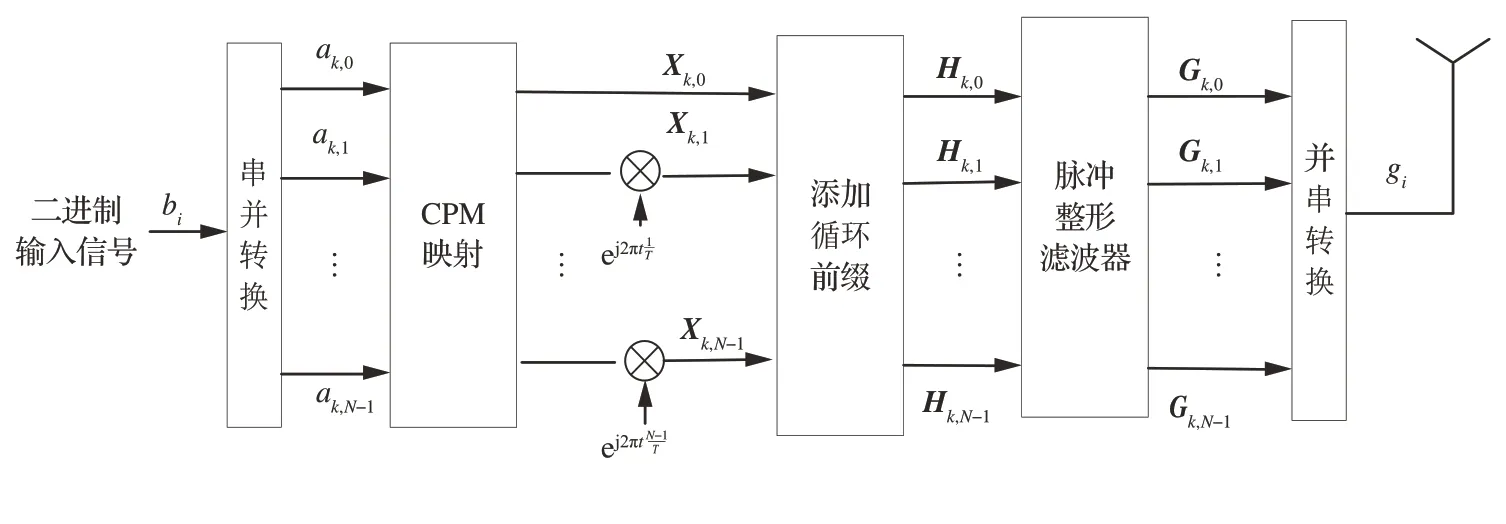
图1 OFDM-CPM 联合调制系统Fig.1 OFDM-CPM combined modulation system
ak,p的定义如下
式中:k=1,2,…,M 表示第k 个OFDM-CPM 数据块;p=0,1,…,N-1 表示此数据块中的子载波序号。
ak,p经过CPM 映射器的预调制后转化为复数信号ck,p,其中CPM 预调制器的定义如下
式中:h 为CPM 映射器的调制指数,0<h<1;φ0为初相,一般情况下可置0。
由CPM 映射器的定义可得以下结论:信号相位θk,p是当前信号以及之前所有的信号共同累加的结果,使得CPM 信号相位具有连续性和记忆特性,为接收信号的准确解调提供了依据;所有的复数星座点ck,p均在单位圆上,即信号幅度是恒定不变的。
ck,p经 过 快 速 傅 里 叶 逆 变 换(Inverse Fast Fourier Transform,IFFT)后得到XM,N,表达式为
为最大限度消除符号间干扰,还需在每个OFDM-CPM 数据块之间插入保护间隔,其长度一般要大于无线信道的最大时延扩展,这样一个符号的多径分量就不会对下一个符号造成干扰。然而在这种情况下,由于多径传播的影响,会产生信道间干扰(Inter-Channel Interference,ICI),即子载波之间的正交性被破坏,不同子载波之间产生干扰。为了消除ICI,OFDM-CPM 符号需要在其保护间隔内填入循环前缀信号,这样就可保证在FFT 运算时间长度内,多径时延造成的影响不会延伸到下一个符号。
将XM,N转 换 为M 行,N 列 矩 阵,以Xk,p中 第i个 数据块Xi,p为例
式中:xi,p为第p 个子载波传输的信息。
添加循环前缀如下
式 中:hin,m为从第n 个子 载 波xi,p提 取 的 第m 个 数据;Tg为保护间隔长度。
所有的Hk,p并行传输,即
Hk,p进入脉冲整形滤波器,即
式中:L 为关联长度;T=NTb是OFDM-CPM 的符号间隔。
当关联长度L=1 时,OFDM-CPM 为全响应信号,输入的数据序列只影响当前信号周期内的相位变化;当L>1 时为部分响应信号,当前输入数据序列不仅影响当前符号的相位,还将影响接下来的L-1 个符号的相位。因此关联长度L与符号数有关,最大值与符号数一致。
1. 3 L/C 波段OFDM-CPM 信号初选
OFDM-CPM 信号并不是指单一的某个信号,而是一个庞大的信号族。通过选择不同的调制指数h 和关联长度L 可以获得不同子类的OFDM-CPM 信号,根据不同系统性能要求选取最佳调制参数组合。鉴于L/C 波段对频谱兼容性要求较高,应优先选择功率谱滚降较快、旁瓣幅度较小的信号。
OFDM-CPM 基带信号归一化功率谱密度GOFDM-CPM( f)为
式中:N 为子载波数;gi为Gk,p进行并串转换后的比特序列;fp为第p 个子载波频率。
图2 展示了调制指数h 对OFDM-CPM 信号功率谱特性的影响。由于h 的取值范围为0<h<1,在进行大量实验对比之后,初筛出h 为0.25、0.5 和0.8。可以看出,h=0.5 时信号的功率谱密度旁瓣幅度最低,因此选取h=0.5 作为OFDM-CPM 信号的调制指数。
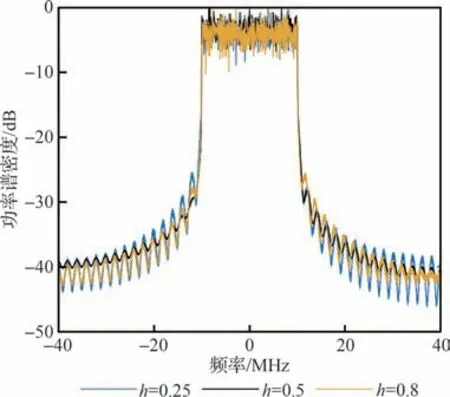
图2 调制指数h 对OFDM-CPM 信号功率谱特性的影响Fig.2 Influence of modulation index h on power spectrum characteristics of OFDM-CPM signals
图3为关联长度L 对OFDM-CPM 信号功率谱特性的影响。当h=0.5 时,选取关联长度L 分别 为1、5、10、64(64 是 所 设OFDM-CPM 符 号数)的信号功率谱密度进行对比。L 越大,信号功率谱旁瓣越低、振荡越小,当L 达到最大值64 即与所设OFDM-CPM 符号数一致时,功率谱滚降最快、旁瓣振荡幅度最小,因此选取L=64 作为OFDM-CPM 信号的关联长度。

图3 关联长度L 对OFDM-CPM 信号功率谱特性的影响Fig.3 Influence of correlation length L on power spectrum characteristics of OFDM-CPM signals
基于上述关键参数对功率谱特性影响的分析,初选出h=0.5、L=64 的OFDM-CPM 信号,但相比其他候选信号是否具有优势,还要评估基础导航性能指标。
目前用来评估GNSS 信号的基础导航性能指标主要集中在兼容性、码跟踪精度和抗多径性能等方面。不论对于L 波段还是C 波段,兼容性均具有最高优先级。L 波段频率跨度大,卫星导航服务信号众多,频谱重叠严重,因此在兼容性方面主要考虑带内兼容性;C 波段仅有20 MHz带宽,且与MLS 频段和RAS 频段相邻,因此在兼容性方面主要考虑带外兼容性。码跟踪精度和抗多径性能都是影响测距精度的重要因素,二者并列于兼容性之后。
2 L 波段候选信号导航性能评估
如果一个卫星导航系统能够同时播发2 个不同频率的载波信号,而且其中一个载波频率是另一个的整数倍,那么更易于修正电离层延迟、探测整周跳变,减小精密单点定位误差[9]。根据3.1 节C 波段兼容性评估,选定C 波段载频为5 022.93 MHz,且 将其1/4 即1 255.733 MHz 作为L 波段载频。此频率刚好位于BDS B3 频段(1 250.618~1 286.423 MHz)内,靠近Galileo E6 频段(1 260~1 300 MHz)。而BDS 在B3 频段 播发BPSK(10)信号,Galileo 在E6 频段播 发BPSK(5)和BOCc(10,5)信号,其中BPSK(m)和BOC(n,m)分别表示扩频码速率为m×1.023 MHz 以及副载波频率为n×1.023 MHz的BPSK 和BOC 信号;若BOC(n,m)采用正弦或 余 弦 副 载 波 信 号,则 记 为BOCs(n,m)和BOCc(n,m)。
一般情况下,GNSS 生产商将信号主瓣宽度作为接收机参考带宽。与BPSK(m)调制信号相同,OFDM-CPM(m)的带宽为伪码码率的2 倍,即2×m×1.023 MHz。对于BOC(n,m)调制,最小带宽等于伪码码率和副载波信号频率之和的2 倍,即2(m+n) ×1.023 MHz。鉴于此,L 波段接收机带宽选为30 MHz。
根据1.3 节L/C 波段OFDM-CPM 信号初选,将h=0.5、L=64 的OFDM-CPM(15)作为L 波段候选导航信号,并与BPSK(5)、BPSK(10)和BOCc(10,5)进行导航性能对比。
BPSK 基带信号归一化功率谱密度GBPSK( f)为
BOCc(n,m)信 号 归 一 化 功 率 谱 密 度GBOCc( f)为
图4展示了4个候选信号的功率谱特性。由图可知,在4 个候选导航信号中,OFDM-CPM(15)信号功率谱旁瓣衰减速度最快,旁瓣幅度最低,在频带内具有最高的频谱集中率。

图4 L 波段4 个候选信号功率谱特性Fig.4 Power spectrum characteristics of 4 candidate signals in L-band
2. 1 兼容性
2007 年,国际电信联盟(International Telecommunication Union,ITU)制定了《卫星无线电导 航业务(Radio Navigation Satellite Service,RNSS)系统间干扰估算的协调方法》(ITU-R M. 1831)[24],将有效载噪比衰减作为GNSS 信号干扰评估协调的主要参数。然而有效载噪比衰减受卫星布局、用户位置和信号体制等多个因素影响,运算量大,计算复杂,无法得到快速解算。
频谱分离系数(Spectral Separation Coefficient,SSC)是有效载噪比衰减的重要组成部分,用于表示干扰信号与目标信号之间的频谱耦合程度,因此SSC 通常作为GNSS 信号兼容性的分析手段[25]。SSC 值越大,表示信号之间的频谱重叠程度越大,干扰信号对目标信号的影响越大。SSC 值即κls表达式如下
式中:接收机前端等效低通带宽Br为30 MHz;Gl( f)和Gs( f)分别为干扰信号和有用信号的归一化功率谱密度。
码跟踪谱灵敏度系数(Code Tracking Spectral Sensitivity Coefficient,CT_SSC)用于 评 估干扰信号对有用信号码跟踪性能的影响[26],定义如式(16)所示。在该式中,CT_SSC 比SSC 在分子和分母上多了一个sin2(πfΔ),该函数项中分子的物理意义是匹配干扰信号的频谱,能够反映出易受干扰的频谱区域;分母的物理意义是,选择目标信号的频谱用于码跟踪。与2.2 节所述信号本身的码跟踪性能不同,CT_SST 反映的是干扰信号对目标信号码跟踪性能的影响,也就是说,CT_SST 是属于分析不同信号间的兼容性指标之一。CT_SSC 越小,干扰信号对目标信号码跟踪精度的影响越小。
式中:Δ 为超前与滞后相关器的间隔,为0.1 chip。
L 波段4 个候选信号的SSC 值如表1。对于干扰信号BPSK(5)、BPSK(10)和BOCc(10,5)而言,有用信号为OFDM-CPM(15)时的SSC 均最小,且当OFDM-CPM(15)作为干扰信号时,与BPSK(5)、BPSK(10)和BOCc(10,5)信号的重叠程度也最小,其中与BPSK(10)兼容性最好。可见OFDM-CPM(15)的带内兼容性优于其他3 个候选信号。

表1 L 波段4 个候选信号的频谱分离系数Table 1 Spectral separation coefficients of 4 candidate signals in L-band
表2展示了L波段4个候选信号的CT_SSC值。有用信号为BPSK(5)、BPSK(10)和BOCc(10,5)信号时,在所有干扰信号中OFDM-CPM(15)的CT_SSC 值最小;相较于其他有用信号,干扰信号BPSK(5)、BPSK(10)和BOCc(10,5)对OFDM-CPM(15)信号码跟踪精度产生的影响均最小。因此OFDM-CPM(15)相较BPSK(5)、BPSK(10)和BOCc(10,5)具有更优良的带内兼容性。

表2 L 波段4 个候选信号的码跟踪谱灵敏度系数Table 2 Code tracking spectral sensitivity coefficients of 4 candidate signals in L-band
2. 2 码跟踪性能
民用航空主要使用伪码测距。扩频伪随机码的测距精度通常称为码跟踪精度,取决于码元宽度,它直接表征了导航系统的测距性能。伪码精确跟踪是伪距测量的前提,因此,在导航信号体制设计过程中就必须考虑码跟踪误差带来的影响。码跟踪性能理论上能达到的最佳跟踪精度由克拉美罗下界(Cramer-Rao Lower Bound,CRLB)给出,而CRLB 与Gabor 带宽紧密相关。
2.2.1 码跟踪误差
当仅考虑高斯白噪声干扰时,相干超前-滞后处理(Coherent Early-Late Processing,CELP)码跟踪环的码跟踪误差标准差为[27]
式中:c 为3×108m/s;BL为码环噪声单边带宽;Ti为相干积分时间;Br为接收机前端等效低通带宽;Δ 为超前与滞后相关器的间隔;Gs( f)为信号归一化功率谱密度;CsN0为载噪比(Cs为信号在无穷带宽上的功率,N0为高斯白噪声功率谱密度)。
2.2.2 Gabor 带宽
高斯白噪声条件下,当且仅当CELP 码跟踪环使用非常小的相关间隔Δ 时,其码跟踪误差方差可接近克拉美罗下界。同时,考虑到BLTi的权值远小于1,忽略BLTi的影响,在相关间隔Δ 趋于零的条件下,利用等价无穷小的性质,克拉美罗下界可近似表示为
Gabor 带宽定义为
显然在同等码环带宽、积分时间和载噪比前提下,Gabor 带宽可作为衡量GNSS 信号码跟踪误差下限的重要指标。Gabor 带宽越大,码跟踪误差下界越小,码跟踪精度越高。
图5 展示了L 波段4 个候选信号的码跟踪性能,其 中Ti=1 ms,Δ=0.1 chip,BL=1 Hz,CsN0=20~50 dB·Hz,图5(a)和图5(b)的Br分别为30 MHz 和0~50 MHz。
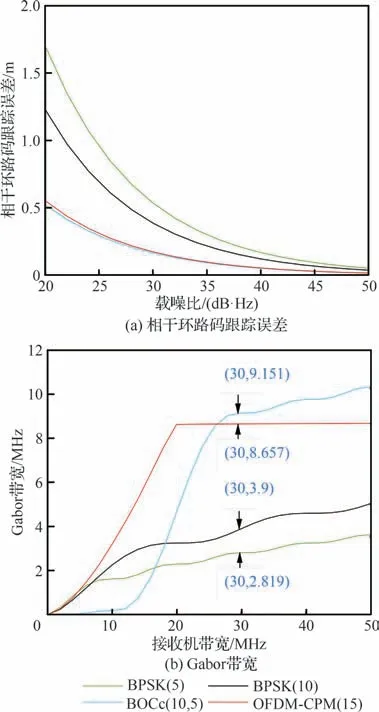
图5 L 波段4 个候选信号的码跟踪性能Fig.5 Code tracking performance of 4 candidate signals in L-band
由图5(a)可知,相干环路码跟踪误差随着载噪比增加逐渐减小,并最终趋于0。由式(17)可知,在BL、Ti、Br、Δ 和CsN0相同的情况下,信号码跟踪误差仅与Gs( f)有关。码跟踪误差最小的信号为BOC(c10,5),OFDM-CPM(15)次之,但几乎与BOCc(10,5)相当,BPSK(5)码跟踪误差最大。由此可以看出,正是OFDM-CPM 优越的功率谱特性使其在码跟踪误差对比中表现突出。
由图5(b)可知,在50 MHz 范围内,当Br增大时,除BPSK(10)信号的Gabor 带宽出现阶梯式增长,其他3 个候选信号Gabor 带宽均随Br的增加逐渐增大,并在最大值处趋于平缓。接收机带 宽为30 MHz 时BOCc(10,5)信 号的Gabor 带宽能达到9.151 MHz,在所有4 个候选信号中居于首位,而OFDM-CPM(15)信号的Gabor 带宽仅比BOC(c10,5)的低了0.494 MHz,位居第二,表明OFDM-CPM(15)信号具有良好的码跟踪性能。
2. 3 抗多径性能
多径误差是卫星导航的主要误差源之一,在时间和空间上均不呈相关性,不能采用差分技术给与消除。因此,研究不同信号调制结构下的抗多径性能成为导航信号设计中的重要一环。多径误差包络和平均多径误差是国际上导航信号评估多径抑制性最常用的2 项指标。
2.3.1 多径误差包络
多径误差包络是在不同多径延迟下多径效应所引起的最大测距偏差,反映了某一多径延迟所对应的最大多径误差。
当只有一条多径信号存在时,相干码跟踪环路的多径误差包络为
2.3.2 平均多径误差
平均多径误差是多径误差包络随多径延迟变化的累积平均值,反映的是某一时延范围内多径误差的整体情况。
平均多径误差与多径误差包络之间存在如下关系
图6 对比了L 波段4 个候选导航信号在单条多径信号条件下的抗多径性能,其中,Δ=0.1 chip,Br=30 MHz。
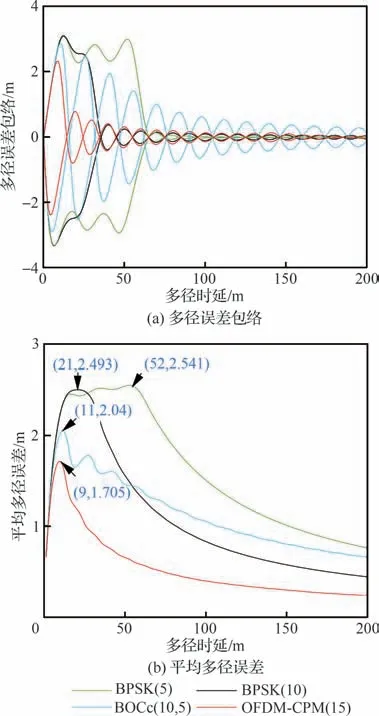
图6 L 波段4 个候选信号的抗多径性能Fig.6 Anti-multipath performance of 4 candidate signals in L-band
从图6(a)可以看出,几乎所有候选信号的多径误差包络都在多径时延为10 m 左右时达到最值,之后随着多径时延的增大该误差包络迅速回落,并逐渐收敛于一个较小值。其中OFDMCPM(15)信号多径误差包络幅度最小,收敛速度最快。
图6(b)给出了平均多径误差随多径时延的变化情况,每个候选信号平均多径误差都在0~60 m 多径时延范围内到达峰值,之后随着多径时延的增大逐渐趋近于0。为量化候选导航信号的抗多径性能,图中给出了候选信号平均多径误差的峰值坐标。显然,OFDM-CPM(15)信号抗多径性能最优,其平均多径误差峰值为1.705 m,分别低于BOCc(10,5)、BPSK(10)和BPSK(5)信号峰值0.335 m、0.788 m 和0.836 m。
综上,BOCc(10,5)信号码跟踪精度最高,但兼容性和抗多径性能并不出色。而BPSK(5)信号虽然带内兼容性表现良好,但码跟踪性能和抗多径能力相比其他候选信号的差。与目前L 波段候选信号相比,OFDM-CPM(15)信号在带内兼容性和抗多径性能方面均表现最优,码跟踪精度仅次于BOCc(10,5)信号,但差距甚小。因此与目前L 波段候选信号相比,OFDM-CPM(15)信号更适合作为BDS L 波段导航信号。
3 C 波段候选信号导航性能评估
C 波段仅有20 MHz 带宽,为最大限度利用频谱资源,C 波段候选信号码速率皆为10×1.023 MHz。Galileo 系统曾考虑将MSK(10)、GMSK(10)和BOCs(5,5)作为C 波段的候选信号,因此选取h=0.5、L=64 的OFDM-CPM(10)信 号 与BPSK(10)、MSK(10)、GMSK(10)、BOCs(5,5)信号进行导航性能对比分析。
3. 1 兼容性
C 波段下行导航信号工作频段为5 010~5 030 MHz,邻频为RAS 频段(4 990~5 000 MHz)、C 波段上行信号频段(5 000~5 010 MHz)以及MLS 频段(5 030~5 150 MHz),因此在兼容性方面,主要评估C 波段导航信号与这3 个频段的带外兼容性,评估指标为功率通量密度(Power Flux Density,PFD)和带外发 射(Out-of-Band Emission,OOBE)功率。
首先介绍PFD 相关兼容性标准。根据ITU规定,位于5 010~5 030 MHz 波段内的导航服务属于次要服务。2020 年,ITU 重新出版了《无线电规则》,第1 卷的第5.443B 款提出[28]:为了不对5 030 MHz 以上频段的MLS 造成有害干扰,在5 010~5 030 MHz 频段内运营的卫星无线电导航业务系统(空对地)的所有空间站,于5 030~5 150 MHz 频带内的地表总PFD,在150 kHz 频带内不得超过-124.5 dBW/m2。
在MLS 频带内的PFD 计算方法如下
式中:EIRP 为卫星的等效全向辐射功率;大气衰减Latm为0.5 dB;d 为地球表面接收机与可见星间的距离;G( f)为C 波段信号功率谱密度。
然而,相比MLS,位于4 990~5 000 MHz 的RAS 对外界电磁干扰更为敏感。2015 年,世界无线电通信大会通过的第741 号决议规定[29]:为了不对4 990~5 000 MHz 频带内的射电天文业务造成有害干扰,C 波段信号功率通量密度须满足
式中:Nsat为射电天文望远镜天线波束内所能观测到的最大可见星数。
假设Nsat=10,则C 波段下行导航信号在RAS波段内的PFD 值不得超过-196.5 dB·W/m2[6]。
C 波段卫星下行导航信号在RAS 频段内的PFD 值表示为
另外,C 波段信号的OOBE 值也是衡量兼容性的重要指标[6],定义为
式中:积分区间分别为RAS 频段、C 波段上行信号频段以及MLS 频段。
Galileo 系统在设计C 波段导航信号时,选择了5 019.861 MHz 作为载波频率,但考虑到RAS的兼容性约束比MLS 的更为严格,若将C 波段导航信号的载波频率适当右移,理论上可在一定程度减小对RAS 的干扰。一般来说,码速率和载波频率为同一频率源产生,若载波频率为码速率的整数倍,会有效提高设计的灵活性。目前GNSS信号体制采用的码速率大多为1.023 MHz 的整数倍,主要有1.023、2.046、5.115、10.23 MHz。5 022.93 MHz 不仅能够满足与上述不同码速率的整数倍关系,还相对C 波段中心频点5 020 MHz向右偏移了2.93 MHz。
若EIRP 为48.8 dBW[30],d 为21 528 km,大气衰减Latm=0.5 dB,则可得到表3 和表4 所示的载波频率分别为5 019.861 MHz 和5 022.93 MHz时,C 波段5 个候选信号在不同服务区间内的OOBE 和PFD 值。

表3 C 波段5 个候选信号在不同服务区间内的OOBE 值Table 3 OOBE values of 5 candidate signals in different service intervals in C-band

表4 C 波段5 个候选信号在不同服务区间内的PFD 值Table 4 PFD values of 5 candidate signals in different service intervals in C-band
由表3、表4 可知,无论载波频率位于5 019.861 MHz 还是5 022.93 MHz,所有C 波段候选导航信号在MLS 服务频段内均能满足PFD值低于阈值-124.5 dBW/m2的要求;然而在RAS 频段内,所有候选信号均不能满足PFD 值低于阈值-196.5 dBW/m2的要求,且在大量仿真之后发现,无论频点选为何值,均无法满足这一要求。若频点以5 022.93 MHz 为基准继续往右偏移1.023 MHz 的整数倍,对RAS 频段内的PFD 只有细微影响,但偏移后的频点不能满足与前面所述不同码速率的整数倍关系,因此依旧选取5 022.93 MHz 作为C 波段候选导航信号的频点。此外,目前几乎无法仅仅通过信号设计来解决RAS 频段内PFD 值不满足要求这一难题,只能借助星载滤波器较强的带外限制来解决。相较5 019.861 MHz,载波频率处于5 022.93 MHz时,C 波段候选导航信号在上行信号区间的平均OOBE 降 低 了3.345 9 dBc,在RAS 频 段 内 的PFD 平均值也低了0.929 2 dBW/m2,说明载波频率选为5 022.93 MHz 不仅能在一定程度上缓解对RAS 的干扰,同时能大幅降低对C 波段上行服务信号的干扰。因此,本文C 波段导航信号的载波频率选为5 022.93 MHz。
可以看出,在5 个C 波段候选信号中,OFDM-CPM(10)信号在RAS 频段的OOBE 和PFD 值以及在MLS 频段的OOBE 值均仅次于GMSK(10)信号,其中在RAS 频段的OOBE 和PFD 值分别仅相差0.401 7、0.400 5 dB·W/m2。由于RAS 频段内的约束条件十分严苛,从目前研究的公开报道来看,大多建议通过增加滤波器解决这一难题,而GMSK(10)正是通过高斯滤波器的加入,才使得其上述带外兼容性性能稍优于OFDM-CPM(10)。 因 此 不 附 加 滤 波 器 的OFDM-CPM(10)信号在RAS 频段内位居第二的兼容性,可在一定程度上减小非理想滤波带来的信号失真程度和星载滤波器设计复杂度。而在C 波段上行信号区间,OFDM-CPM(10)信号具有最低的OOBE 值。因此,综合考虑,OFDMCPM(10)信号具有优良的带外兼容性。
3. 2 码跟踪性能
图7 展示了C 波段5 个候选信号的码跟踪性能,其中Ti=1 ms,Δ=0.1 chip,BL=1 Hz,CsN0=20~50 dB·Hz,图7(a)和 图7(b)的Br分 别 为20 MHz 和0~40 MHz。
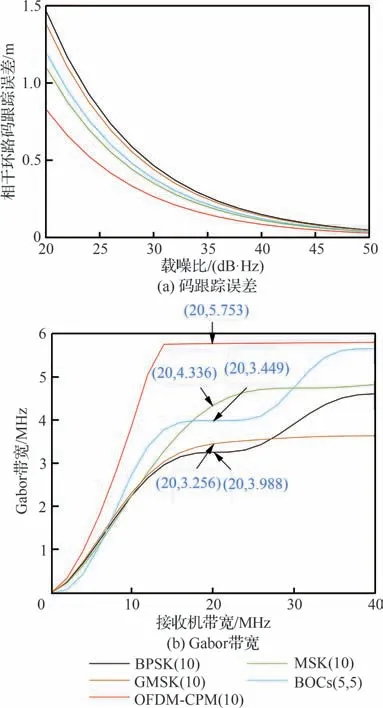
图7 C 波段5 个候选信号的码跟踪性能Fig.7 Code tracking performance of 5 candidate signals in C-band
由图7(a)可知,相干环路码跟踪误差随着载噪比增加逐渐减小,并最终趋于0。码跟踪误差最小的信号为OFDM-CPM(10),最大的为BPSK(10)。
由图7(b)可知,在40 MHz 范围内,当Br增大时,BPSK(10)和BOCs(5,5)信号的Gabor 带宽出现阶梯式增长,其他候选信号Gabor 带宽均随Br的增加逐渐增大,并在最大值处趋于平缓。接收机带宽为20 MHz 时,OFDM-CPM(10)信号的Gabor 带宽能达到5.753 MHz,在所有候选信号中居于首位,优于位居第二的MSK(10)信号1.417 MHz。
3. 3 抗多径性能
图8对比了C 波段5 个候选导航信号在单条多径信号条件下的抗多径性能,其中,Δ=0.1 chip,Br=20 MHz。

图8 C 波段5 个候选信号的抗多径性能Fig.8 Anti-multipath performance of 5 candidate signals in C-band
从图8(a)可以看出,几乎所有候选信号的多径误差包络都在多径时延为20 m 左右时达到最值,之后随着多径时延的增大该误差包络迅速回落,并逐渐收敛于一个较小值。在0~30 m 内,OFDM-CPM(10)信号多径误差包络幅度最小。
图8(b)给出了平均多径误差随多径时延的变化情况,每个候选信号平均多径误差都在0~50 m 多径时延范围内到达峰值,之后随着多径时延的增大逐渐趋近于0。为量化5 个候选导航信号的抗多径性能,图中给出了候选信号平均多径误差的峰值坐标。显然,OFDM-CPM(10)信号抗多径性能最优,其平均多径误差峰值为2.513 m,分别低于MSK(10)、GMSK(10)、BPSK(10)和BOCs(5,5)信 号 峰 值0.420 m、0.978 m、1.130 m 和1.342 m。
通过以上分析可以看出,MSK(10)信号较BPSK(10)、GMSK(10)和BOCs(5,5)信号表现出更好的码跟踪性能和抗多径性能,但兼容性较差。通过附加高斯滤波器而实现信号产生的GMSK(10)信号在RAS 频段内带外兼容性表现最佳。而不附加任何滤波器的OFDM-CPM(10)信号在RAS频段的OOBE和PFD值与GMSK(10)信号的相差甚小,在MLS 频段的OOBE 值仅次于GMSK(10)信号,码跟踪性能和抗多径性能在C 波段候选信号中均居于首位,因此综合来看,OFDM-CPM(10)信号更适合作为BDS C 波段导航信号。
由上述分析可以得到,无论是在L 波段还是在C 波段,OFDM-CPM 信号都表现出优越的兼容性、码跟踪性能和抗多径性能。在工程实现层面,考虑的主要问题包括OFDM-CPM 接收机的复杂度以及北斗C 波段导航实现的成本等。相比在4G 通信中已成为关键技术的OFDM,OFDM-CPM 信号的产生与接收主要分别在发射端和接收端增加了“CPM 映射器”和“CPM 解映射器”。相位连续特性使OFDM-CPM 接收机具有较高复杂度,获得较简单的接收机及其实现方法一直是该领域的研究重点,目前大多采用“FFT+CPM 解映射”的架构,其中CPM 解映射可用Viterbi 算法 来实现[31]。在北斗C 波 段导航的实现方面,主要是相较于L 波段导航,C 波段导航卫星的EIRP 在最保守星地链路预算下可达48.8 dB·W[30],为降低该EIRP 值但同时保证接收机正常跟踪,就需要采用高性能天线和高质量接收机,因此,在目前技术条件约束下,北斗C 波段导航更适合用于播发军用和授权信号[14]。
4 结 论
在北斗导航系统L/C 双波段导航模式下,提出将调制指数h=0.5、关联长度L=64 的OFDM-CPM(15)信号和OFDM-CPM(10)信号,分别应用于L 波段和C 波段。通过对兼容性、码跟踪精度、抗多径干扰等基础导航性能指标的评估,得到以下结论:
1) 在L 波 段,OFDM-CPM(15)信 号 较BPSK(5)、BPSK(10)和BOCc(10,5)信号表现出更好的兼容性,码跟踪精度仅次于BOCc(10,5)信号,但二者相差甚小甚至相当,抗多径能力在4 个候选信号中最优,因此相较BPSK(5)、BPSK(10)和BOCc(10,5)信 号,OFDM-CPM(15)信号具有突出的优势。
2) 在C 波段,OFDM-CPM(10)信号能很好地兼顾C 波段的带外约束性和导航性能的要求,在一定程度上缓解与邻频RAS、MLS 和C 波段上行信号的干扰,同时在码跟踪精度与抗多径干扰方面更具优越性,较BPSK(10)、MSK(10)、GMSK(10)、BOCs(5,5)信号更具竞争力。
