基于多重移位复用的轴承健康监测报警存储方法研究
2023-07-27颜丙生张柏李奇刘兆亮刘鹏飞
颜丙生,张柏,李奇,刘兆亮,刘鹏飞
(河南工业大学机电工程学院,河南郑州 450001)
0 前言
可倾瓦滑动轴承因具有高负载、低摩擦、运行稳定、可自动调节等特点,广泛应用于旋转机械。在高速重载工作环境下,任何早期轴承故障都可能会引发灾难性事故。为保证安全生产,需要开发轴承监测系统[1-5]。报警存储是系统的核心,主要用于监测异常数据和自动记录报警前后一段时间内的数据。
1986年,美国国家仪器公司(NI)提出虚拟仪器这一概念,它集现代计算机技术、通信技术和测量技术于一身[6-7]。目前国内外主要通过虚拟仪器来搭建监测系统。闫鑫等人[8]根据存储式测试方法,利用LabVIEW平台构建用于逻辑信息获取和处理的虚拟逻辑分析系统。江弘杰、贾维敏[9]通过API函数库和SQL数据库完成数据采集和存储系统设计,保障了数据存储率。DU、 DONG[10]使用虚拟仪器集成应用GPS、AHRS等构建一套道路测试系统。SHEN等[11]着眼于动态测量,设计了多通道并行动态测试虚拟仪器系统。VILLANUEVA-LPEZ等[12]基于LabVIEW开发了红外激光光谱测量系统。传统存储方式易造成缓存时间长度变化、数据丢失等问题[13],将LabVIEW与其他软件结合存在不兼容、影响系统运行等问题,需要研究其他方法完成报警存储。
针对上述问题,本文作者结合多个移位寄存器、队列和循环索引提出一种基于多重移位复用的报警存储方法,并进行实验验证。
1 系统架构
1.1 监测系统整体结构
监测系统服务于某研究所生产的径向五瓦可倾瓦滑动轴承[14],硬件整体结构如图1所示,主要由采集装置(传感器、采集卡、采集卡机箱)和显示装置(上位机)组成。通过布置多点位多类型传感器对可倾瓦滑动轴承进行实时监测。

图1 硬件整体结构
监测系统整体框架如图2所示,分为硬件驱动、信号采集、分析、存储、回放、报警、定时报表七大模块,其中存储模块分为趋势存储、手动存储以及报警存储3种。趋势存储用于趋势图的绘制,方便观察所有被测量物在工作状态下的变化趋势;手动存储是对采集过程中需要存储的信号执行手动操作,对所有原始数据进行保存;报警存储需要实现将发生报警时以及报警前后10 s内的原始数据进行自动存储。相较于趋势存储和手动存储,报警存储用于分析报警原因,要求和实现方式更为复杂。

图2 监测系统整体框架
1.2 报警存储时长计算
报警存储作为分析报警原因的重要方式之一,每次报警均需要存储单独文件。应用户需求,常规报警存储时长21 s。根据不同的报警类型,报警存储时长会发生变化。具体计算过程如式(1):
(1)
其中:T表示报警存储时长;A表示报警前时间长度(A<10取A,A≥10取10);B表示报警次数;C表示报警总间隔时长(Cn表示相邻报警间隔时长,Cn≤20,n=B-1)。由式(1)可知报警存储时长最小值为11 s,最大值由实际报警情况决定。
1.3 多重移位复用算法设计
移位寄存器可以在循环之间传递值,常见于循环两侧,位置相对。右侧接线端用于存储每次循环结束时的数据并传递到左侧接线端,作为下次循环的初始值[15]。利用移位寄存器的短暂存储特性,通过在循环左侧连续布置多个移位寄存器,扩大存储时长是多重移位复用算法的基础。算法流程如图3所示。

图3 多重移位复用算法流程
2 多重移位复用报警存储实现
2.1 数据获取
设置采样时钟内部采样数等于各通道采样率之和,信号采集所在循环每秒循环一次,根据这一特性可以控制只存储报警前后10 s的数据。如图4所示,以加速度信号数据获取方式为例进行说明。将循环左侧21个布尔型移位寄存器与“或”函数并联,发生报警时触发报存,保证常规报存触发时间为21 s;循环左侧11个数值型移位寄存器依次连接,从最下方移位寄存器中导出数据,即当前循环10 s前所采集的信号数据。

图4 加速度信号数据获取
监测系统发生报警后,报存触发,此时10 s前加速度信号数据通过队列进入存储所在循环,执行报警存储。21 s后,加速度信号数据对应报存刚触发10 s后数据,通过队列进入存储所在循环,报存完成。发生连续报警且间隔小于20 s时,报存触发时长与式(1)计算一致。报警前监测系统运行不足10 s时,对应加速度信号数据输出为0,报存触发时长虽为21 s,但是前期无数据存储,实际存储时长仍与式(1)一致。
2.2 数据存储
数据获取和数据存储处于不同循环,如图5所示,采用生产者消费者结构中的元素入队列和出队列实现数据传输。将不同类型、不同状态的数值、数组、布尔等捆绑成簇,将簇输入元素入队列,元素出队列后解除簇捆绑得到各类数据。数据遵循先进先出的原则,当内存被挤满时系统就会报错,可以防止数据丢失。数据采集和存储速度需要把握,最好的状态就是完全同步[16]。

图5 队列传输
存储格式采用TDMS,它以二进制数据类型进行存储,读写速度快、占用硬盘空间小。图6是报警存储子VI控制TDMS文件的条件结构。将“creat”和“close”均与图4“alarm”关联,触发报警后,“alarm”执行真,2个条件结构均执行真分支。创建TDMS文件,不执行TDMS关闭,数据进行存储;报警结束后,“alarm”执行假,2个条件结构均执行假分支,TDMS关闭,报警存储结束。

图6 数据存储执行方式
在后续程序调试过程中报警存储出现报错,原因是触发报警后,“creat”短时间内触发条件恒为真,同一个文件每秒都会被打开一次,占用一定运行时间。以默认采样率为例,每秒存储29 400个数据点,数据量庞大,数据存储速度低于数据采集速度,导致程序报错。针对这一问题,提出“左二右一法”来确保在报警存储过程中同一TDMS文件仅打开一次。如图7所示,修改报警存储“creat”触发条件,将左边第一个寄存器连接“与”函数,第二个寄存器取“非”后连接“与”函数,初始附加“F”,输出结果连接“creat”,右边移位寄存器通过队列连接“alarm”输出结果。报警触发后,左边第一个移位寄存器输出“T”,第二个移位寄存器取“非”后也输出“T”,“与”函数输出为真,“creat”触发条件为真,创建TDMS文件,开始进行报警存储。1 s后,“T”经左边第一个移位寄存器传递到第二个移位寄存器,取“非”输出“F”,“与”函数输出为假,TDMS文件不再打开,执行第一次创建的文件输出。报警结束后,通过 “close”控制TDMS文件关闭,报警存储完成。存储文件以当前时间命名,便于实验人员及时找到所需报警信息。

图7 三种存储方式
3 实验验证
图8是实验测试现场,为验证多重移位复用报警存储的适用性,将7块NI采集卡插入机箱,通过网线与主机进行数据传输,加速度传感器连接至NI-9234采集卡0通道,设置该通道振动烈度报警值为10 mm/s。分别验证3种状况下轴承监测系统报警存储的对应结果。

图8 实验测试现场
(1)常规报警
在监测系统正常运行一段时间后(超过10 s),对桌面施加一定激励,振动烈度大于10 mm/s触发报警,10 s后停止采集。进入数据回放界面,根据文件名称找到该报警存储文件进行数据回放。箱体振动趋势回放结果如图9所示,趋势图中每秒取一个数据点,可以看到报警发生在15:12:19,报警前后各有10个数据点,趋势图从15:12:09持续到15:12:29,对应21个数据点,持续21 s,符合常规报警存储要求。

图9 常规报警
(2)连续报警
在对桌面施加第一次激励后,10 s内对桌面施加第二次激励,触发连续报警。图10是连续报警箱体振动趋势数据回放结果。可知:2次报警间隔8 s,第一次报警前和第二次报警后各有10 s数据,整个报警存储持续30 s,与式(1)计算结果一致,符合连续报警要求。

图10 连续报警
(3)系统运行不足10 s发生报警
在监测系统运行10 s内对桌面施加一定激励,触发报警,趋势回放结果如图11所示。可知:在系统运行8 s后触发报警,报警存储持续18 s,报警前自动存储8 s数据,与式(1)计算结果一致。
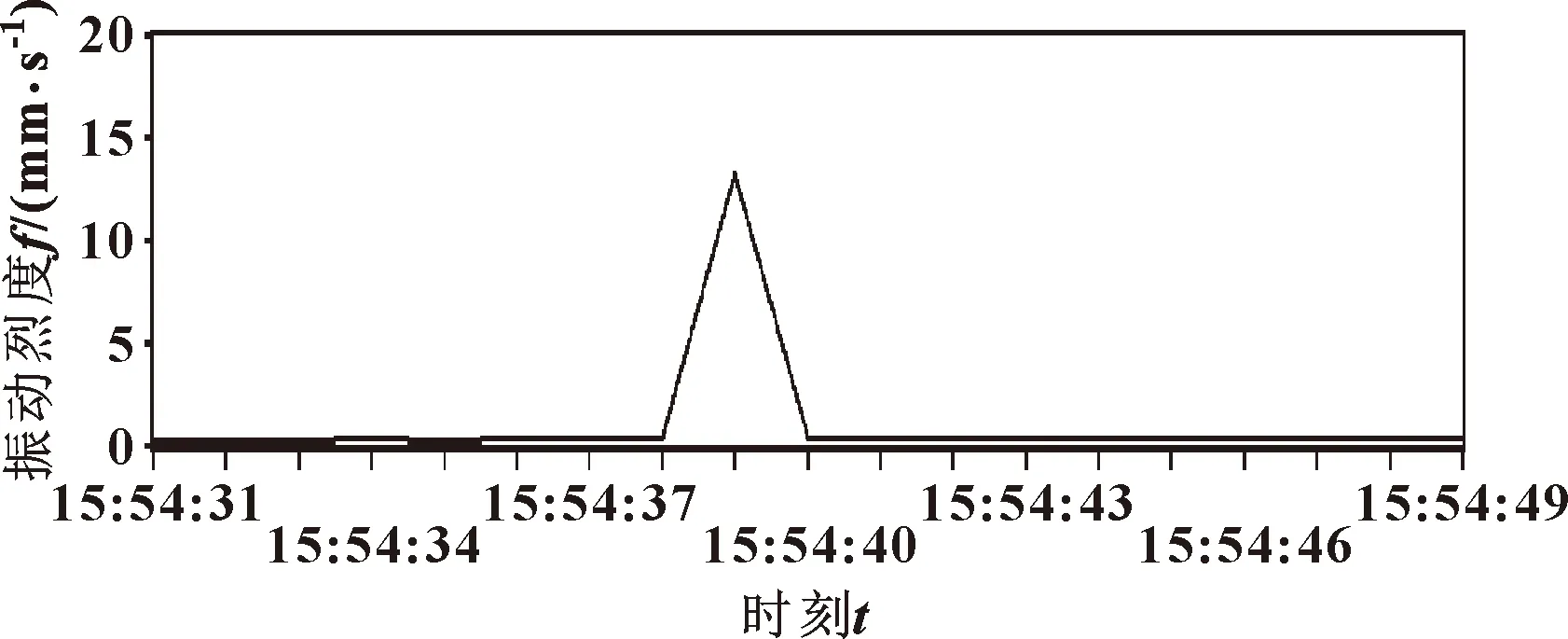
图11 系统运行不足10 s发生报警
通过对3种报警类型存储结果进行数据回放分析,结果表明多重移位复用报警存储符合用户要求,存储时长在不同报警类型下均与式(1)一致,数据完整。
4 结论
(1)以可倾瓦轴承实验台为研究背景,在其监测系统基础上,开发出基于多重移位复用的报警存储方法。解决了传统报警存储缓存时间长度随采样率变化、缓存数据丢失、单次报警等问题,满足用户实际需求,目前该系统已成功用于某车间性能监测。
(2)多重移位复用报警存储无需调用其他软件,无软件兼容问题,不影响监测系统整体运行,适用于多数虚拟仪器测试系统。
