基于滚珠丝杠传动的机床进给系统建模与分析
2023-07-27陈哲钥张建业吕张成刘浩
陈哲钥,张建业,吕张成,刘浩
(1.天津工业大学机械工程学院,天津 300387;2.天津工业大学天津市现代机电装备技术重点实验室,天津 300387)
0 前言
随着制造业的高速发展,对零部件的加工精度要求也愈来愈高,数控机床作为加工零部件和推进制造业发展升级的载体,在制造业升级中占有重要地位。数控机床进给系统是整个数控机床中由机械系统与控制系统组合的具有精确和快速执行数控指令到达指定位置的集成系统,担当着数控机床的核心部件。而滚珠丝杠传动作为数控机床进给系统最常见的传递机构,通过联轴器与交流伺服电机相连接,数控指令作用于电机编码器使得电机带动支撑在角接触轴承组上的滚珠丝杠转动,再通过丝杠与螺母间的传动比i使得工作台做直线进给运动。文献[1]指出高速运动的过程中进给系统的振动特性与高速机床控制系统的带宽有一定影响。商用数控控制器,如FANUC和西门子都要求机器设计者使机械系统的一阶固有频率比伺服响应带宽高一级,以确保驱动机构安全稳定的运行[2]。文献[3-4]通过实验得知,对于大多数技术应用,轴向模式的特征频率明显小于旋转模式的特征频率。因此,轴向模式通常被称为滚珠丝杠进给系统的一阶固有频率。由此可知,在对进给系统进行动态特性分析时,需要建立精确的动力学模型,定量分析其零部件参数及工作状态对一阶固有频率的影响,并通过仿真预测其动态特性。文献[5]通过集中质量法建立了进给系统的动力学模型,且通过共振频率的正弦扫描实验对比验证了此模型的正确性;文献[6-8]使用有限元法(FEM)和混合建模法建动力学模型,尽可能详细地描述了进给系统的动力学行为。然而,上述建模未将零部件刚度的改变以及工作状态对进给系统一阶固有频率的影响考虑进去。在伺服控制系统设计方面,KIM、CHUNG[9]提出一种离散控制器的综合伺服机构设计方法,文献[10]提出迭代学习轮廓控制器,但在伺服系统设计过程中忽略了对外部干扰的抑制以及对现有摩擦的补偿。
针对这些问题,本文作者通过Hertz接触理论和吉村允孝法,结合有效机械参数计算部件结合部刚度,并代入拉格朗日方程建立的数控机床进给系统动力学模型,将动力学模型求解结果与ANSYS有限元分析结果进行对比,并定量分析部件参数及工作状态对数控机床进给系统振动一阶固有频率的影响。考虑到机械系统与控制系统之间的耦合作用,为使进给系统能快速精准到达数控指令预期的指定位置,基于MATLAB软件中的Simulink模块建立含有摩擦影响的伺服系统控制模型,对于进给系统位置和速度跟踪响应出现的不利情况,采用前馈补偿进行有效的改善。
1 刚度计算
1.1 固定结合部
吉村允孝通过对大量机床结合部进行实验研究得出:平均接触压力相同的两固定接触的物体,其结合部单位面积内的动态特性数据是相同的[11]。当螺栓连接和过盈配合结合部压力分布均匀时,结合部等效刚度的基本积分公式为
K=∬kidxdy
(1)
式中:ki是法向单位面积接触刚度。
1.2 滚动结合部
Hertz接触理论被广泛应用于研究相互接触的两弹性体间接触变形和接触应力。假设两材料均匀和各向同性且满足胡克定律的物体,在外力F的作用下相互接触,并且两物体接触表面光滑、接触面尺寸与物体的曲率半径比值趋近于无穷小量,则两物体在接触过程中的弹性变形δ可表示为
(2)
式中:Kh和a是Hertz系数;u1、u2为两接触体的泊松比;E1和E2是两接触体的弹性模量;∑ρ为接触点的综合曲率;P为法向接触力。
以滚珠丝杠为例计算结合部的刚度,在轴向力F的作用下滚珠丝杠螺母副结合部受力如图1所示。其中滚珠与滚道之间的法向压力为P,α为滚珠与滚道接触点的压力角,φ为滚珠丝杠的螺旋升角,Z为滚珠数目。受力分析可得:
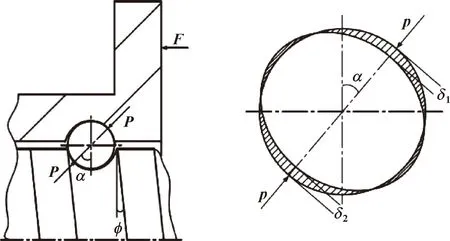
图1 滚珠丝杠螺母副结合部受力分析
F=PZsinαcosφ
(3)
由Hertz接触理论得到的弹性变形:
(4)
(5)
(6)
式中:db为滚珠直径;d为丝杠公称直径;f1、f2为密合度。
由滚珠丝杠螺母副的几何关系可知丝杠螺母相对丝杠的轴向位移为
δ=(δ1+δ2)/sinαcosφ
(7)
则滚珠丝杠结合部的轴向刚度可以表示为
Kn=F/δ
(8)
角接触轴承组等其他滚动结合部可根据式(2)—(8)计算,因篇幅关系不再阐述。
2 动力学建模与分析
2.1 动力学建模
在伺服电机的旋转运动通过以滚珠丝杠为传动元件转化为工作台的直线运动的数控机床进给系统中,整个进给系统传动链的刚度可以等效地视为丝杠及其支撑元件为了抵抗驱动力作用下进给方向所受力与变形的比值。为了更好地研究进给系统的动态特性,使建立的动力学模型更加符合实际状态,并且准确地预测进给系统的动态性能,现将床身和轴承座简化为刚体。由于丝杠螺母副和轴承副在进给过程中作为关键的动力传递与转换的构件,且丝杠作为细长杆,在轴向简谐力的作用下产生一定的变形与振动,会在数控加工时影响伺服系统的定位精度,从而影响零部件所需的加工精度,因此不能将其简化为刚体。作者把螺栓连接的丝杠螺母、螺母座、导轨滑块、工作台视为整体,通过丝杠螺母中点将材料均匀连续、各向同性的丝杠划分为两段,并将螺母与丝杠两端的轴承副简化为弹簧-阻尼系统。根据上述简化条件,数控机床进给系统在简谐外力作用下的简化动力学模型如图2所示。
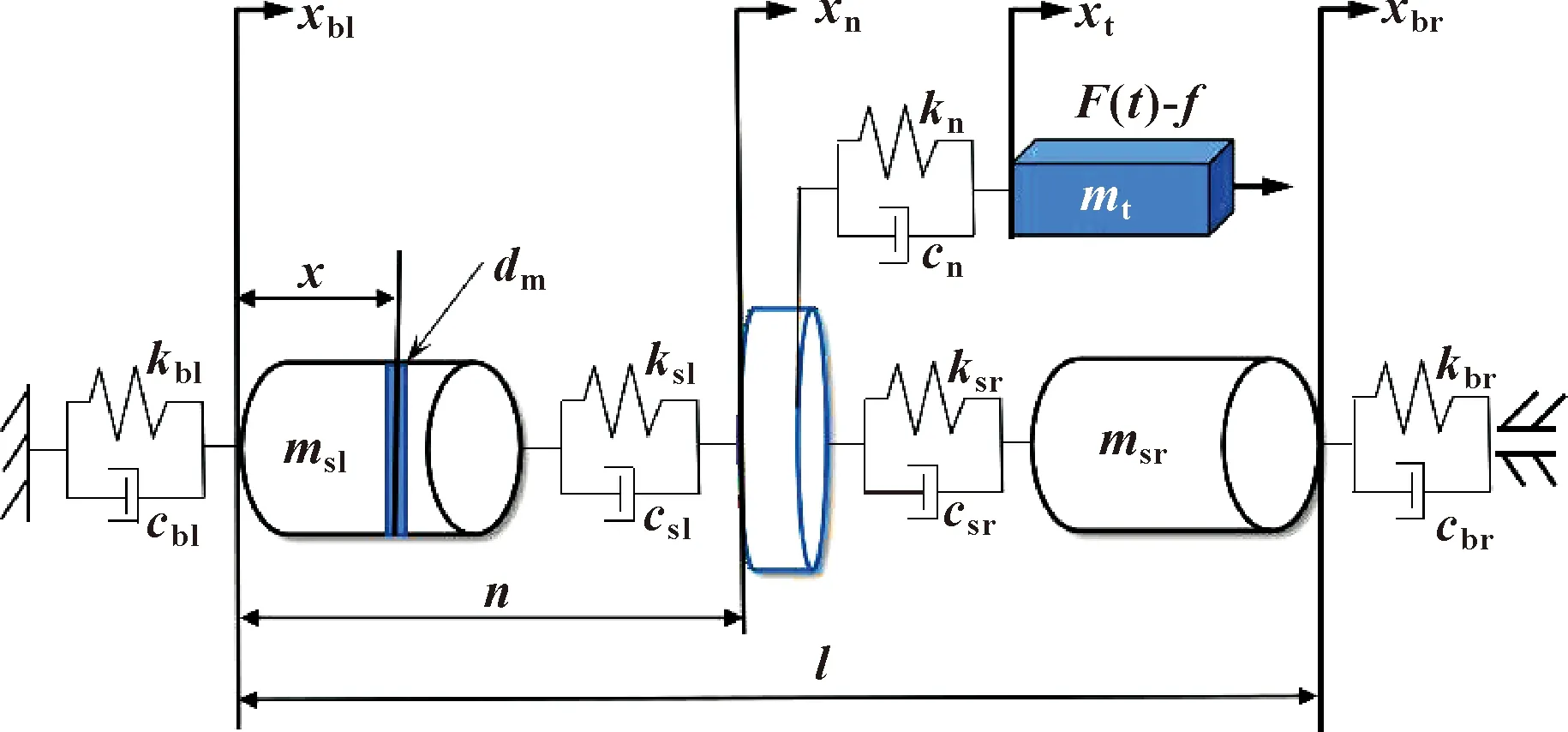
图2 动力学模型简化
图中:kbl、cbl分别为左端轴承副(包括联轴器、电机轴)刚度系数和阻尼系数;F(t)为简谐力;f为摩擦力;msl、msr分别为左、右段丝杠质量;l为丝杠总长;n为t时刻左端丝杠长度;xbl为丝杠左端位移;ksl、csl、ksr、csr分别为与工作台位置有关的左、右段丝杠刚度和阻尼系数;xn为螺母位移;mt为工作台质量;xt为工作台位移;kn、cn分别为螺母及螺母座结合部刚度和阻尼系数;kbr、cbr分别为右端轴承副刚度和阻尼系数;xbr为丝杠右端位移。
由于螺母使得丝杠左右两段的运动受力情况不同,因此在计算动能时选取微元dm,其位移为
(9)
则左段丝杠的动能为
(10)
右段丝杠的动能为
(11)
式(10)—(11)中:
msl11=msl22=msr11=msr22=msl/3
msl12=msr12=msl/6,msl=n×ms/l
工作台动能为
(12)
整个进给系统的总动能为
(13)
在对动力学模型简化的过程中,由于两端轴承副与螺母简化为弹簧-阻尼系统,丝杠被视为弹性杆件,因此数控机床进给系统的总势能可以表达为
(14)
系统的耗散能计算可将整个进给系统的阻尼假设为与速度成正比的黏性阻尼得:
(15)
取L=T-U将上式代入第二类拉格朗日方程
(16)
式中:广义坐标q为
q=[xblxnxtxbr]T
广义力F为
F=[0 0F(t)-f0]T
将计算得到的系统动能T、势能U、耗散能D代入式(16),得到系统运动的微分方程为
(17)
将式(17)整理成矩阵形式得:
(18)
式中:M为惯性系数矩阵;C为阻尼系数矩阵;K为刚度系数矩阵。
2.2 一阶固有频率求解
由于进给系统的位置精度与闭环带宽通常受到一阶固有频率的限制,除特定阻尼机制结构外,在现实结构中,由于一般机构的阻尼比ξ非常小,且对机构的固有频率影响微乎其微[12],因此,式(18)可以表示成无阻尼自由振动方程
(19)
假设系统进行简谐运动,则有
x=Xsin(ωnt+φ)
(20)
对式(20)求导
(21)
将式(20)、(21)代入式(19)得齐次线性方程组
(22)
要使得方程组有非零解,需要特征方程等于零,即X的系数行列式等于零,求得ωn就是进给系统的固有频率。
现拟用HIWIN公司R40-10B1-OFSW行程为1 250 mm丝杠的某机床进给系统为研究对象,通过刚度计算和原有参数,可得动力学模型参数见表1。
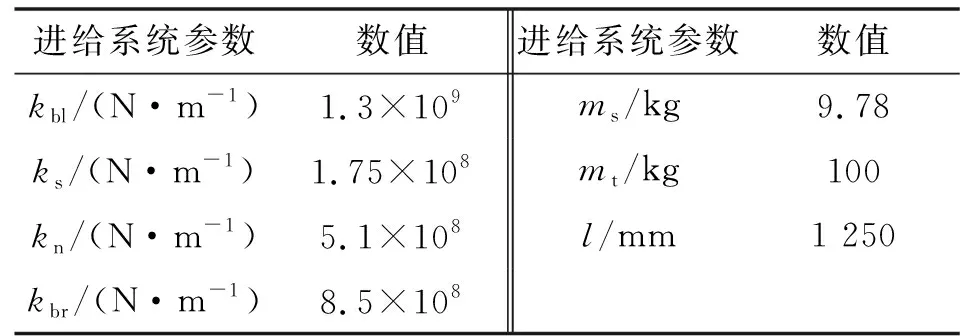
表1 进给系统刚度及结构参数
当工作台位于丝杠中间位置时,将表1数值代入动力学方程用MATLAB求解轴向一阶固有频率,与ANSYS软件中的Workbench模块有限元分析的结果进行对比,结果见表2,基于有限元分析一阶振动模态见图3。
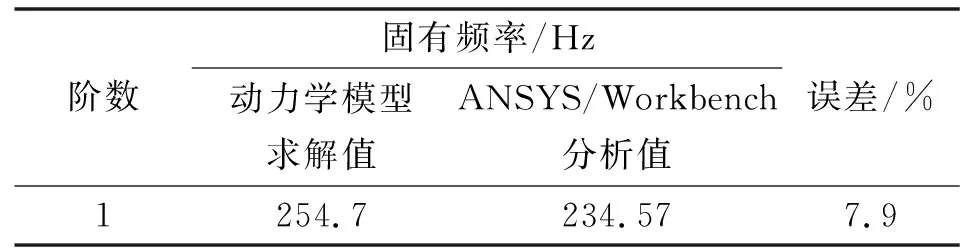
表2 进给系统一阶频率对比

图3 有限元一阶振动模态
可以对比出动力学模型计算与有限元分析误差为7.9%,在一个比较合理的范围,说明通过赫兹接触理论和吉村允孝法,结合有效机械参数计算部件结合部刚度,并通过拉格朗日方程建立数控机床进给系统的动力学模型可以比较精确地预测数控机床进给系统的动态性能,同时造成误差的主要原因在于模型处理方式不同。
由于进给系统刚度以及结构参数对一阶固有频率有一定影响,下面将定量分析这些参数的变化对进给系统一阶固有频率的影响。
针对进给系统各结构参数之间的耦合关系,数控机床在加工的过程中,进给系统一直在做进给运动。在工件装夹与切削的过程中,工作台位置与质量时刻发生着变化。图4、图5采用控制变量法分别分析了工作台质量和工作台位置变化对进给系统一阶固有频率的影响。
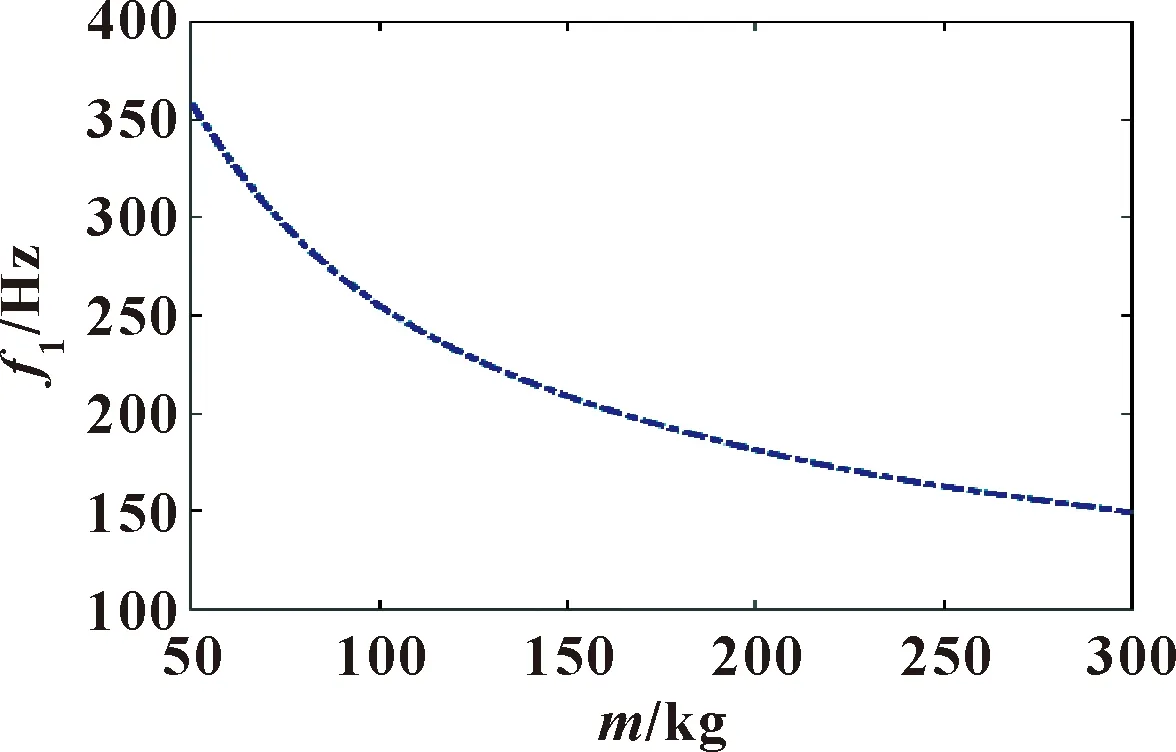
图4 工作台质量m对一阶固有频率f1的影响
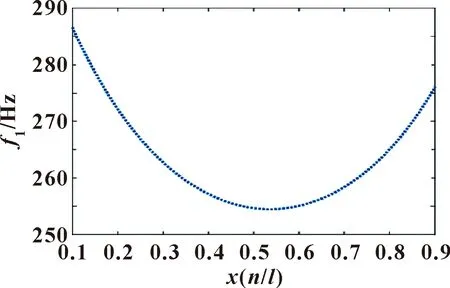
图5 工作台位置x对一阶固有频率f1的影响
在对工作台质量变化进行分析时,为了分离出各结构参数变化对固有频率的影响,只改变工作台质量,其他参数视为常数。由图4可知:工作台质量mt在50~300 kg间变化,进给系统一阶固有频率从358.3 Hz下降到147.6 Hz,且在原有质量(100±10)kg的时候,一阶固有频率为242.7~268.9 Hz,变化率为10.3%。
保持部件刚度和工作台质量不变,仅单独改变工作台位置,从图5可知:最低频率出现在工作台运行到丝杠中间的位置,且当进给运动从近电机端向远电机端时,进给系统一阶固有频率变化规律呈现出先降低再升高的趋势。
保持工作台质量与位置不变,当且仅当单独改变部件刚度,从图6可以看出:在部件刚度逐渐增大的过程中,进给系统一阶固有频率也在逐渐增大;当刚度增大到一定值时,频率增大趋于平缓。对比滚珠丝杠螺母副和轴承副刚度增大固有频率的变化率,可明确得出滚珠丝杠螺母副刚度变化对一阶固有频率影响较大。其主要原因是滚珠丝杠相对于整个进给系统来说是细长杆件,是整个进给系统中最薄弱的环节,在轴向简谐力的作用下易发生变形和振动,因此,滚珠丝杠螺母副刚度变化对其一阶固有频率影响比较大。

图6 部件刚度对一阶固有频率的影响
3 伺服环境下进给系统仿真分析
为准确得到数控机床进给系统中机械系统和控制系统耦合作用下,工作台的实际速度与位移对数控指令的跟踪性能,在第2章动力学模型的基础上,添加利用矢量变换的方法建立交流永磁同步电机(PMSM)线性解耦下类似于直流电机的数学模型,并设计伺服系统三环电流环、速度环、位置环。为探讨摩擦力对进给系统伺服响应的影响,在机电耦合模型中加入与速度相关的黏性摩擦模型[13]。
PMSM由于具备低转矩脉冲、高效率、高精度、高能量密度的特点,广泛应用于机加工设备和电驱设备的大范围调速和定位系统中。假设在复杂电磁耦合下电机定转子满足三相定子绕组间隔120°、不计转子和永磁体的阻尼、不计涡流和迟滞的损耗,PMSM可通过矢量变换的方法将定子上a、b、c三相交流转换为定子α-β二相交流再变换到d-q二相直流,其公式原理如下:
(23)
通过MATLAB软件中的Simulink工具箱建立PMSM采用id=0矢量控制策略的PID控制+前馈控制的三环伺服系统机电耦合仿真模型如图7所示,其Subsystem中封装了电流环、摩擦模型及机械系统。模型中Kd为速度环放大系数、Ku为电压放大系数、Kv为速度环反馈系数,PID控制器中Kp、Ki、Kd分别为比例、积分、微分系数,伺服控制参数取值见表3。
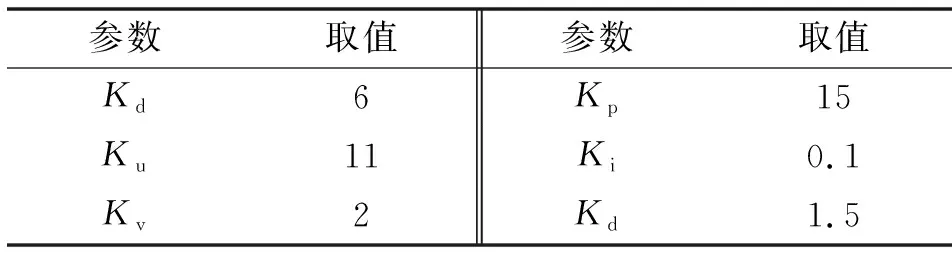
表3 伺服控制参数
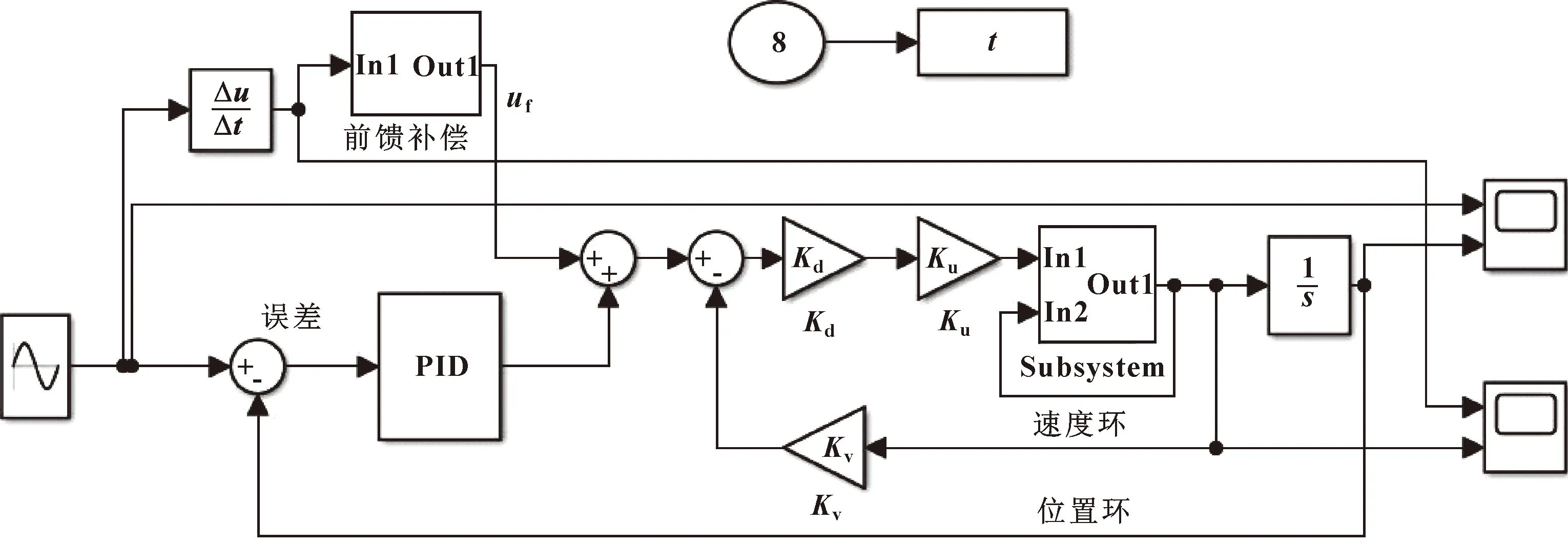
图7 进给系统机电耦合模型
拟以叠加的正弦信号作为伺服环境下数控机床进给系统的输入指令,以电动机的角速度、丝杠的角位移和工作台位置作为反馈信号,得到进给系统在有无摩擦补偿下的仿真结果。图8在没有摩擦前馈补偿的情况下,明显看出:位置跟踪易出现“平顶”的现象;而速度跟踪下,特别是速度过零的附近区域,出现明显的“死区”现象。这2种现象对精密零部件的加工精度有着重大影响,甚至有着报废零部件的可能。图9在使用PID控制+前馈控制的情况下,对摩擦影响进行一定补偿,“平顶”和“死区”现象得到了明显改善,从而提高了进给系统在作进给运动时的精准性,保证了加工精度。
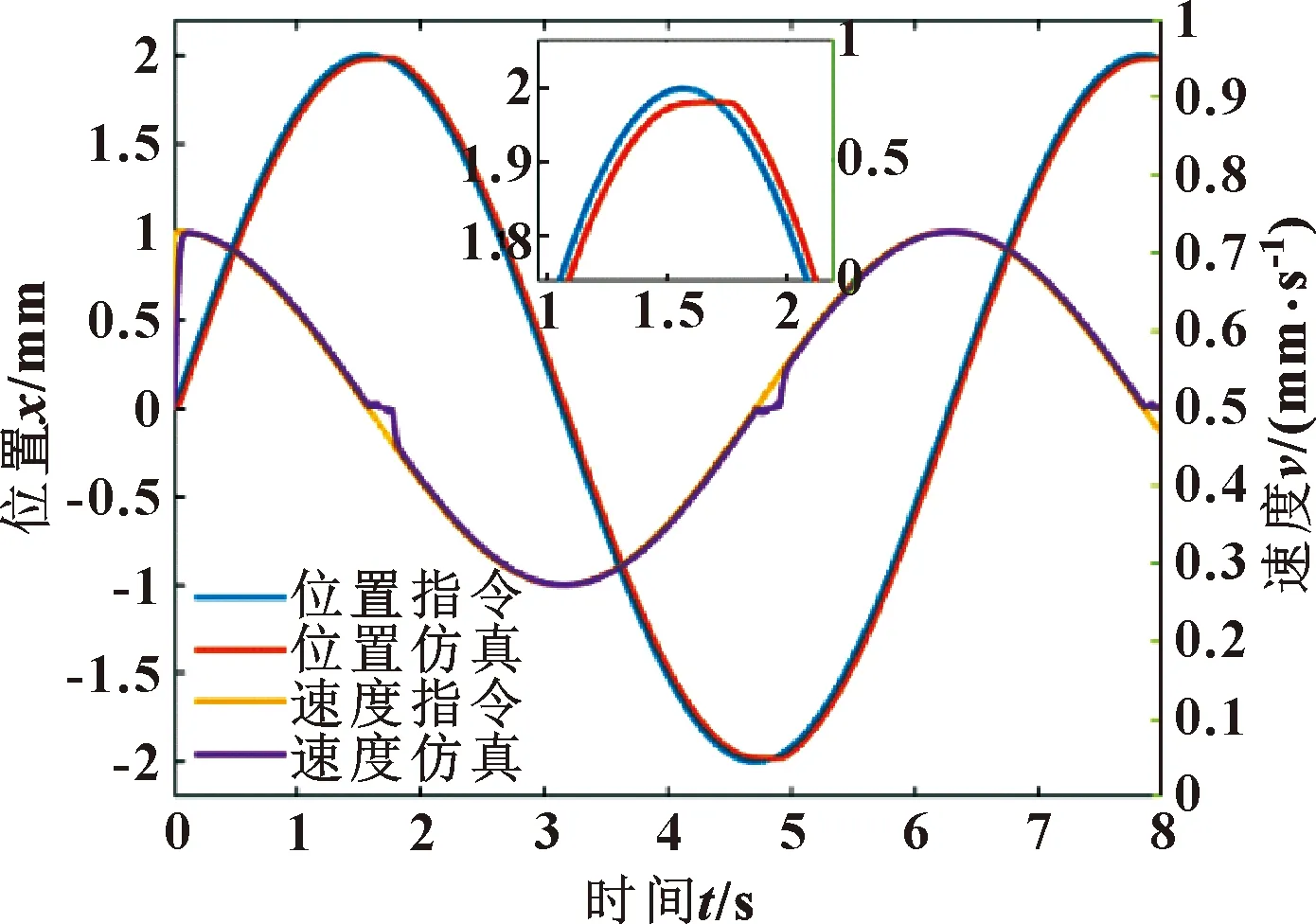
图8 无摩擦补偿下速度、位移响应
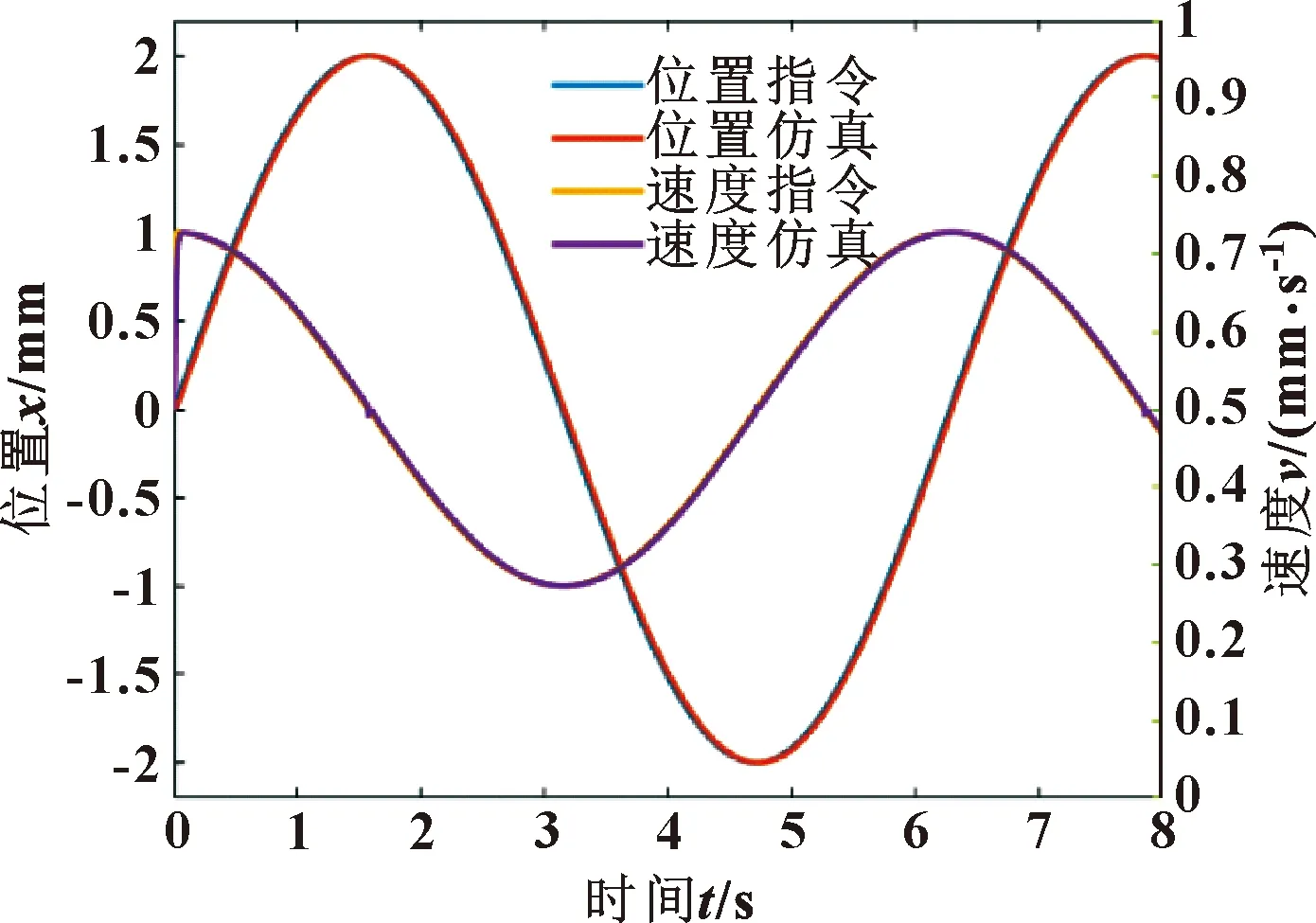
图9 摩擦补偿下速度、位移响应
4 结论
(1)基于滚珠丝杠传动的机床进给系统,通过赫兹接触理论与吉村允效法阐述零部件动力学刚度参数的计算,并代入拉格朗日方程,建立了零部件刚度改变以及工作状态改变对进给系统一阶固有频率影响的进给系统动力学模型。
(2)动力学模型一阶固有频率求解与ANSYS分析对比验证,误差在7.9%,确保了动力学模型的准确性。定量分析频率的影响因素得出:随着工作台质量增大,固有频率降低;固有频率随部件刚度增大而增大;当工作台位于丝杠中间位置时固有频率最低。所建动力学模型为进给系统动态特性优化提供理论指导。
(3)用MATLAB/Simulink工具箱建立了进给系统的机电耦合模型,通过PID控制+前馈控制改善了进给系统“平顶”和“死区”现象,为摩擦力影响下滚珠丝杠传动的机床进给系统运动控制与动态误差补偿提供了参考。
