乒乓发球机器人手臂末端位置误差补偿研究
2023-07-27黄炜皓陈静文任鹏博
陈 怡,黄炜皓,陈静文,任鹏博
(1.常州大学怀德学院,江苏 靖江 214500;2.华南理工大学,广东 广州 510641;3.北京师范大学未来教育学院,广东 珠海 519087)
1 引言
最近几年以来,机器人快速进入人类生活中[1],但是智能水平比较低,通过机器人可以更好为人类服务,全面提升智能水平。乒乓球发球机器人是一个典型的实时、智能系统,主要包含智能控制以及传感器等多项核心技术,是展开系统集成以及技术水平的良好应用,研究乒乓球发球机器人在体育智能化领域具有重要的意义[2-3]。乒乓球是我国的国球,因此乒乓球在我国属于十分常见的运动,乒乓球发球机器人主要用于运动员的日常训练中,研究其手臂末端位置误差补偿方法具有重要意义。
国内相关专家针对机器人手臂末端位置误差补偿方面的内容展开了大量研究,例如文献[4]构建曲线运动轨迹偏差和运动学模型,分析机器人在运动过程中产生的轨迹,通过最小二乘算法根据运动轨迹特点确定机器人手臂的最优运动学参数,完成误差补偿。
文献[5]利用Denavit-Hartenberg方法建立机器人在过程中的手臂运动学模型,获取压脚压紧力与手臂末端平移变形量之间存在的关系,结合孔位信息完成离线补偿。文献[6]提出了一种全梯度标准粒子群优化反馈(FGSPSO-BP)神经网络的工业机器人末端位姿补偿模型。通过提出的运动学逆变换、基于全梯度下降法的FGSPSO-BP两种算法,并利用神经网络的方法,实现了对机器人各实际关节角度值的补偿。文献[7]以IRB1410型串联机械臂为研究对象,采用理论分析、仿真分析与实验验证相结合的方式,研究分析和补偿机械臂末端位置误差,解决了机械臂连杆柔性、关节柔性等非线性变形的综合影响,导致其末端位置发生偏离而产生误差的问题。
文献[8]提出了一种基于神经网络的末端位置误差补偿方法,将两种不同类型的参数误差等效视作伪误差,通过神经网络来逼近伪误差造成的末端位置误差曲线,建立末端位置误差与绳索长度之间的映射关系,并在关节空间中进行位置误差补偿。
但上述几种方法,在补偿误差后,精度均不高,效果不佳。因此,针对误差补偿精准度的问题,以乒乓球发球机器人手臂为研究对象,设计了一种机器人手臂末端位置误差补偿的方法。
经大量实验测试结果表明,所提方法可以获取更加满意的误差补偿结果。
2 方法设计
2.1 乒乓球发球机器人手臂末端位置误差建模和影响分析
乒乓球发球机器人在工作过程中会因为各式各样不同的因素产生运动误差,进而对机器人手臂末端位置精度产生影响,产生误差的因素主要包含以下几种类型,分别为:
(1)加工误差
在乒乓球发球机器人工作过程中,会因为各个部件的加工工艺进而导致生产误差的存在。
(2)装配误差
在组装机器人的过程中,会因为一些安装步骤引发安装间隙和偏差,进而导致装配误差的存在。
(3)形变误差
乒乓球发球机器人在工作过程受到力的冲击,导致机器人的关节和连杆结构发生形变,进而引发形变误差。
(4)仪器测量误差
主要是因为机器人控制器在测量监控数据中由仪器测量精度引发的误差。
通过以上分析客户,导致乒乓球发球机器人手臂末端产生位置误差的原因有很多种,所以需要对影响运动精度的因素整合处理,全面降低构建误差模型中的参数。
微分运动变换在机器人的运动学研究中占据十分重要的地位,当乒乓球发球机器人随机一个关节的几何参数发生微小变化时,需要将微小变换转移到目标参考系或者基准坐标系中。
设定机器人任意一个连杆的位姿矩阵为S,则相对基准坐标发生微分变换后的位姿矩阵可以表示为式(1)的形式:
式中:Trans( dx,dy,dz)—在基准坐标上x轴、y轴和z轴上的微小移动距离dx、dy和dz;Rot(k,dθ)—微小转动角度;I—实际和理论坐标两者之间的偏差。
针对基准变换坐标系而言,设定经过转换之后的坐标A,则对应的变换矩阵Trans(d)可以表示为式(2)的形式:
通过右手法获取围绕矢量轴转动角度的一般性变换矩阵Rot(k),θ,具体表达形式,如式(3)所示。
式中:kx、ky、kz—不同的矢量;
θ—机器人手臂的旋转;
versθ—θ对应的取值范围。
根据转换关系获得下式:
式中:δx、δy和δz—不同坐标轴对应的微分变换算子。
乒乓球发球机器人在制造和安装过程中主要受到环境等因素的影响,因此运动过程机器人手臂末端位置受到干扰容易产生误差。为了提高误差补偿效果需要构建乒乓球发球机器人手臂末端位置误差模型[9]。
以下主要通过MD-H法和微分变换原理建立模型,优先通过不同运动学参数获取对应的齐次变换矩阵。
当各个参数存在比较小的误差时,乒乓发球机器人的实际相邻连杆之间的变换关系以及理论之间的变换关系也会存在一定的误差,最终导致末端位置坐标也存在误差。
由于各个连杆机构之间均存在几何参数误差,通过微分运行变换原理可以获取实际以及理论变换矩阵两者之间的关系fAi,如式(5)所示。
ΔA—连杆i的微分变换矩阵。
通过式(6)获取微分运动变化矢量和几何参数之间的数学函数关系hi:
式中:c—元素的位置矢量;
βi、αi—微分运动变化矢量;
ai—姿态矢量变化规律。
由于乒乓发球机器人的误差补偿对象是末端位置,所以需要采用式(7)获取连杆i对应转换关系:
式中:n—末端连杆数量;(p×n)x,y,z、(p×o)x,y,z和(p×a)x,y,z—不同角度的末端位姿。同时,为了更好完成误差补偿,需要将各个连杆产生的误差相加,进而获取总误差。
2.2 乒乓球发球机器人手臂末端位置误差补偿
分析乒乓球发球机器人手臂末端位置误差的正态分布情况,通过最小二乘法可以快速求解最优参数。
针对存在大量噪声的测量数据,在辨识过程中可能会出现不收敛甚至发散的情况。所以,可以将观测值和估计值两者的平方和D表示为式(8)的形式:
通过2.1小节的乒乓球发球机器人手臂末端位置误差模型可以准确反映机器人末端位置误差和运动学参数两者之间的关系,为后续误差补偿研究奠定坚实的基础。为了有效提升机器人手臂末端位置误差,通过运动学参数来增加运动学模型的准确性。根据末端位置坐标坐标测量设备激光跟踪仪获取机器人末端位置的实际值,将其设定为最小二乘法样本观测值。设定共有m组数据,则对应的参数辨识模型可以表示为式(9)的形式:
式中:Δqm—样本点对应的位置坐标值;um—雅克比矩阵。
为了确保得到最优解,需要设定采集样本的数量。由于乒乓发球机器人属于冗余机器人,所以各个运动学参数之间存在冗余关系,需要求解雅克比矩阵对应的奇异矩阵,更加准确辨识运动学参数分解。以下需要分解处理奇异值,通过初等行变换,获取线性相关和对应奇异值之间的关系。删除运动学参数中线性相关变量,同时剔除雅克比矩阵中的列,进而获取去除冗余参数的乒乓球发球机器人手臂末端位置误差模型,
最小二乘法的参数辨识流程,如图1所示。
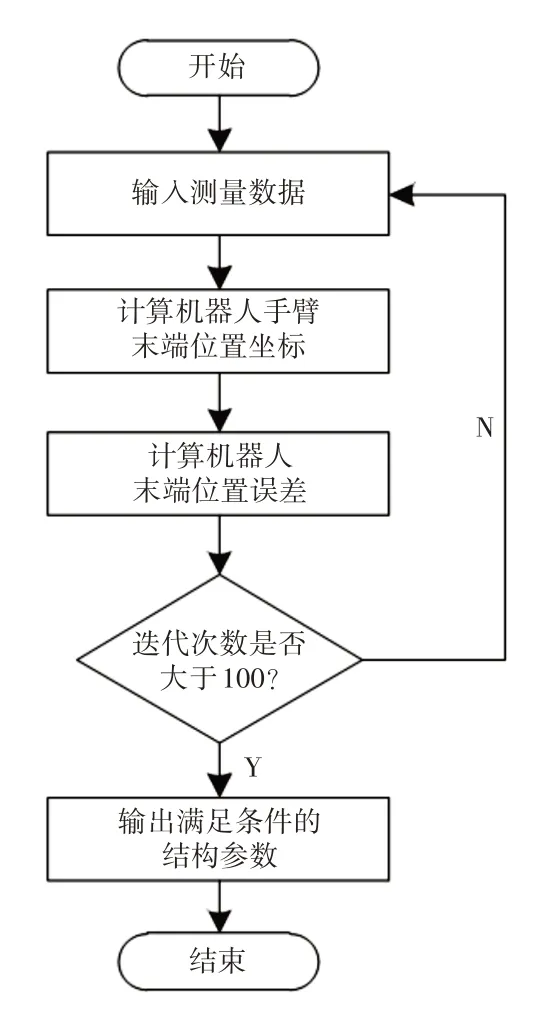
图1 基于最小二乘法的运动学参数辨识流程图Fig.1 Flow Chart of Kinematic Parameter Identification Based on Least Squares Method
上述误差模型只体现了轨迹误差受参数静态误差的影响产生的变化,机器人属于动态性能,因此在误差补偿过程中需要考虑末端负载、机器人系统整体自重等因素产生的影响,以上因素的存在会导致模型的建立变得十分困难,无法统一对全部模型展开补偿。
优先对乒乓球发球机器人工作空间实行网格划分处理[10],参考点选取立方体在网格中对应的顶点,机器人在参考点的误差可以通过测量仪器测量得到。通过机器人的逆变换矩阵可以获取机器人在不同顶点的关节空间误差Δϕi,j,如式(10)所示。
在运动过程中机器人的控制点处于立方体内部,不单一位于某个顶点。因此,获取的乒乓球发球机器人手臂末端位置误差具有连续性,以下将关节距离权重设定为评价函数的插值误差补偿方法,通过式(11)给出控制点和立方体顶点之间的关节空间距离权重ωi:
式中:β—控制点数量。
根据上述分析结果,通过下式计算不同控制点对应关节的误差值Δϑi,j:
将得到的控制点处不同关节点的误差值,补偿到理论姿态,将补偿应用到机器人运动规划的关节转角中,最终实现手臂末端位置误差补偿ρ(i,j):
3 实验与仿真分析
3.1 实验环境及设备概况
为了验证所提乒乓球发球机器人手臂末端位置误差补偿方法的有效性,选取乒乓球发球机器人作为研究对象,实验环境及设备如下:
系统环境:Microsoft Windows7专业版,Intel(R)Core(TM)i5-3470 CPU@3.20GHZ;
软件环境:MATLAB E2014a;
硬件设备:SONY摄录-体机。体机参数类型:产品类型:自带硬盘的高清的摄像机;传感器类型:Exmor R CMOS;最大像素:420万;快门描述:1/6~1/1000s。
开发语言:MATLAB;
乒乓球发球机:世霸龙发球机。包装尺寸:(88×41×36)CM;消耗功率:30W;额定交流电压:(100~240)V;额定功率:50W;额定频率:50/60Hz;出球频率:(35~90)/min;出球速度:(4~40)m/s;出球落点:全台不定点;乒乓球直径d=0.04m。
遥控器:电子控制器。
3.2 实验步骤
本实验研究发球机器人手臂末端定位误差问题,并给予补偿,达到减小机器人手臂末端定位误差,实验步骤如下:
(1)首先通过乒乓球发球机器人多次发球,设定采集样本的数量,并采集发球机器人手臂末端点轨迹,如图2所示。本次实验设置采样样本数量为300 次,采样频率即发球频率为每分钟(30~90)次,采样时间为10min,分别从三个维度(x、y、z)对机器人手臂末端点轨迹进行补偿,发球机器人手臂末端点轨迹,如图2所示。

图2 发球机器人手臂末端点轨迹Fig.2 End Point Trajectory of Serve Robot Arm
(2)其次将发球机器人手臂末端位置产生的数据,输入构建的发球机器人手臂末端位置误差模型中,再根据公式进行相应的转换,得出总误差。
(3)补偿获得的总误差,对在不同的位置的误差进行补偿前和补偿后对比。
3.3 实验结果
在乒乓球发球机器人完成训练之后,获取到的机器人手臂末端在x、y、z三个维度,不同位置点补偿前后的结果,如图3所示。
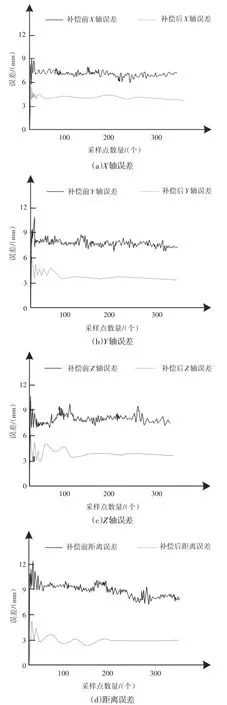
图3 乒乓球发球机器人手臂末端位置误差补偿前后测试结果分析Fig.3 Analysis of Test Results Before and After the Error Compensation of the Arm End Position Error of the Table Tennis Serving Robot
分析图3可知,通过所提方法可以实现不同方向的乒乓球发球机器人手臂末端位置误差补偿,且补偿效果十分稳定,相比补偿前,误差得到明显的下降。
为了进一步验证所提方法的优越性,分析补偿前后的精度变化情况及补偿耗时,该分析采用对比实验的形式,对比方法分别为所提方法、文献[4]方法和文献[5]方法。详细的实验测试结果,如表1和表2所示。

表1 位置误差补偿前后各个方法精度测试结果对比分析Tab.1 Comparative Analysis of the Accuracy Test Results of Each Method Before and After Position Error Compensation
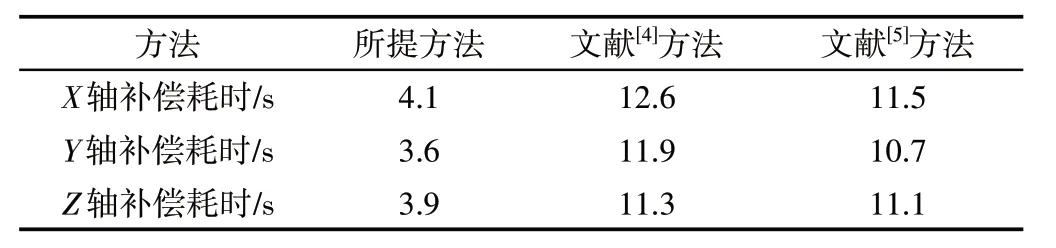
表2 位置误差补偿耗时测试结果对比分析Tab.2 Comparison and Analysis of Time-Consuming Test Results of Position Error Compensation
根据表1 测试结果可知,所提方法补偿后最大误差为5.6mm,并且补充后方差和均值较低,仅为0.000102mm 和3.0mm,而文献[4]方法和文献[5]方法补偿后的最大误差分别为8.7mm 和9.0mm,补偿后方差为0.00182mm 和0.00195mm,并且均值达到了4.2mm和4.5mm,三种方法相比可知,所提方法补偿后最大误差降低了3.1mm 和3.4mm,并且方差和均值均降低了0.0017mm和1.2mm以上,由此可知,所提方法的误差补偿效果高于对比方法,该方法有效提高了补偿效果。
根据表2测试结果可知,所提方法补偿最长耗时为4.1s,在Y轴的补偿时间达到了最低,该值仅为3.6s,而文献[4]方法和文献[5]方法补偿最长耗时分别为12.6s和11.5s,最低耗时也达到了11.3s和10.7s,通过对比所提方法的最高补偿耗时和文献方法的最低补偿耗时可知,所提方法的补偿耗时降低了6.6s以上,因此,验证了所提方法的误差补偿效率高于另两种方法,说明应用该方法的乒乓发球机器人的工作效果更好。
所提方法取得较好的应用效果是因为该方法通过MD-H法和微分变换原理建立乒乓球发球机器人手臂末端位置误差模型,并通过最小二乘法可以快速求解最优参数,增加运动学模型的准确性。
4 结束语
针对机器人手臂末端位置误差和误差补偿问题,针对机器人运动学基础理论展开研究,提出一种乒乓球发球机器人手臂末端位置误差补偿方法。经实验测试结果表明,所提方法可以有效降低位置误差,获取满意的补偿结果。
所提方法仍然存在不足,后续将针对以下内容展开研究:
(1)后续可以将机器人的姿态误差变化加入研究过程中,进而展开更加全面的误差分析以及补偿。
(2)虽然所提方法分析不同了参数误差对精度产生的影响,在后续研究过程汇总可以通过误差因素增强末端定位精度。