可变阀驱气门运动跟踪PSO和KF改进PID控制器
2023-07-27和豪涛李高磊李金辉
和豪涛,李高磊,李金辉
(1.河南交通职业技术学院汽车学院,河南 郑州 450005;2.河南科技大学车辆与交通工程学院,河南 洛阳 471003)
1 引言
当汽车引入了可变气门技术来提升发动机性能。从可变气门的发展阶段看,相对于凸轮驱动可变机构,对于整体动力系统控制方面采用无凸轮可变气门机构可以实现下述几项优势[1-3]:(1)可以灵活选择气门驱动方式;(2)可以设置更优的可变气门空间位置;(3)能够实现对发动机压缩比的灵活调节。而对于无凸轮可变气门机构则需设置气门驱动结构与对应的控制系统。液压驱动可变气门属于一类获得广泛使用的无凸轮可变气门。液压驱动可变气门通常选择电磁阀等方式来调控液体的流入与流出过程,由此达到控制液压缸的效果,使气门保持开启或关闭状态。
文献[9]通过正交试验的方式设置了不同的气门参数,之后通过ANSYS软件仿真测试了气门落座应力,显著减小了气门落座的冲击作用。文献[10]设计了一种对凸轮进行分段设计的方法,可以同时实现充气效率、运行稳定性、接触应力方面的控制要求,同时还能够进行气门调节以及油液补偿的过程。文献[11]设计了一种凸轮驱动液压可变气门,分别测试了节流阀开度与倒拖转速引起的压力变化。文献[12]展开发了一种可根据工况进行调节的液压气门控制结构,能够连续调节气门最大升程、配气相位与开启角度,使进气门开启时间明显缩短。文献[13]构建得到可变气门正时结构与油路控制系统,达到理想的气门开启状态,提升了发动机的燃油利用率,获得更高效的动力输出。文献[14]对电液式可变气门系统开展了仿真测试并设计了优化实验,设计了一种电液可变气门测试系统,并在该系统中加入了单向节流阀来实现控制功能,使气门落地速度显著减小,从而使气门在落地过程中产生很大的振幅。
文献[15]过卡尔曼滤波对传统的PID控制进行改进,取得了很好的效果,但容易出现收敛不稳定的情况。这里在前人研究的基础上,设计了一种可变阀驱动模型之后结合热力学原理建立活塞移动位移与燃烧过程反应方程,并根据PID控制器,通过卡尔曼滤波(KF)以及粒子群算法(PSO)来达到优化PID控制器的效果。在Matlab软件中完成气门升程、速度及其加速度的仿真分析,并跟未改进的PID控制气门升程状态实施了比较。
2 液压驱动模型
2.1 可变阀驱动
这里选择的可变阀驱动结构来实现气门控制功能,如图1所示。以下是该结构的具体工作原理:当发动机启动后,经曲轴将驱动力传输至齿轮泵使其发生旋转,之后油液从油箱被输入到主泵与二级泵内,随着油压的提高来完成蓄能器的储能过程,由此获得稳定的油压力。

图1 可变阀驱动系统Fig.1 Variable Valve Drive System
通过差动移相器实现高压与低压旋转阀的控制功能,使气门分别保持开启与关闭状态。在高压旋转阀开启的状态下,气门保持开启状态,关闭高压旋转阀之后,气门到达最大升程位置时,则继续等待低压旋转阀开启。
低压旋转阀达到开启状态后,气门发生关闭,低压阀保持关闭状态,同时气门也完全关闭[10-11]。
在主泵上游形成很大的压力后,应采用二级泵进行主泵上游压力调控,实现主泵能耗的大幅降低。
2.2 液压动力学
根据牛顿第二定律得到活塞运动方程[16]:
式中:m—活塞质量;x—活塞位移参数;Fp—预紧过程作用力;
Ap—活塞截面积;Fg—气动作用力;P2—液压缸的内部压力;
f—库摩擦力;K—刚度;C—摩擦系数。
通过数学模型得到以下废气质量变化的计算式:
式中:Pcyl,mcyl,Tcyl依次对应气缸压力、废气质量、温度;Cm—影响
气流量大小的系数;Aec—气缸的横截面参数。
根据下式计算活塞移动位移:
式中:lRod—活塞杆的长度;rCS—曲柄半径;θCS—曲柄的角度。
废气排气燃烧气体温度方程,如下所示:
式中:ucyl—气体焓;hcyl—气体比热容;Q—气体流量。
假定进行排气的过程中活塞体和气缸间不发生热量传递过程,则可以得到以下的液压缸压力梯度方程:
式中:β—体积模量;QH—高压旋转阀流量;V20—液压缸中产生的死区容积;QL—低压旋转阀流量。
2.3 空气蓄能器
在液压泵工作阶段以及高压旋转阀保持关闭状态的情况下,将会引起液压系统产生更高上游压力。
在上述过程中,通过液压泵产生流量并将其储存至蓄能器内。
开启高压旋转阀的状态下,液压油持续流入液压缸内,同时引起液压系统上游压力的减小。
将蓄能器内的空气按照理想气体进行处理,则可以构建以下的气体压缩与膨胀变化表达式[17]:
式中:P1、P2—各时刻对应的压力;V1、V2—各状态下的容积。
假定供油管路不发生泄漏的条件下,可以将气体量变化表示成:
式中:Qp—泵流量。
可以将压力梯度通过以下表达式进行计算:
将液压泵流量近似表示成以下的关系式:
式中:Vd—泵排量;ηv—泵容积效率;Np—泵转速。
3 气门运动控制
3.1 气门升程运动
在不同的发动机气门升程运动轨迹下,会对气门落座稳定性也造成一定的影响,并且获得不同的汽油利用率。
增大发动机转速的过程中,进气门提前角随之增大,同时对排气门的滞后角造成推迟效果。
这就要求精确调控气门的升程参数。这里选择正排量泵来实现对压力与流量的调控功能。
关闭HPSV后,通过液压泵将液体输送至蓄能器内,此时供应压力持续提高。开启HPSV后,流体通过供给管路到达液压缸中,发动机阀门被开启,供给压力减小至最初设定值。保持恒定的发动机转速状态下,通过以下式计算气门升程:
式中:Ne—发动机转速,推导得到:
式中:rp—泵和发动机的转速比值。
考虑到泵容积效率会逐渐发生变化,因此需为液压泵设置相应的控制器来实现速度调控的功能,确保气门实际升程接近理论值。从实际角度出发发动机转速取3000r/min,气门升程取Lf=12.0mm。
3.2 PID控制器
PID控制器根据误差反馈结果,可以实现比例控制、微分与积分过程的在线调节功能,具体控制过程[14],如图2所示。

图2 PID控制图Fig.2 PID Control Diagram
进行PID控制时,根据以下式子计算误差:
式中:r(t)—理论设定参数;y(t)—实际输出结果。定义如下PID控制方程:
3.3 卡尔曼滤波
卡尔曼滤波(Kalman Filtering,KF)按照当前观测结果与估计值实现递推过程的预测与修正。定义以下的系统状态与观测方程式[12-13]:
式中:Ak—k时刻下对应的状态转移矩阵;Hk—k时刻对应的观测矩阵;Bk—k时刻对应的参数矩阵;Vk—k时刻对应的观测噪声;Wk—k时刻对应的系统噪声。
KF包括以下二个阶段:
(1)预测阶段。以下是对系统状态进行预测的方程:
(2)更新阶段。以下为更新状态估计:
以下是更新后的协方差矩阵:
以下为KF增益:
3.4 粒子群算法优化控制
粒子群算法(PSO)采用迭代的方式实现自身位置的更新,搜索获得全局最优结果。以下是对粒子速度与位置进行更新的计算式:
式中:vi(k)与vi(k+1)—第i个粒子经过k与(k+1)次迭代处理后的速度;xi(k)与xi(k+1)是第i个粒子经过k与(k+1)次迭代处理获得的位置;ω—惯性权重系数;c1与c2是位于区间[0,2]内的学习因子;r1、r2属于[0,1]之间的随机数;Pi—粒子i最佳个体位置;G—粒子种群最佳位置。
惯性权重系数对粒子进行局部与全局搜索的效率存在显著影响,为充分发挥两者的各自搜索优势,修改惯性权重系数得到:
式中:ω0—最初设定的权重系数;ω1—最终的权重系数;t—目前迭代次数;T—最大迭代次数。
气门升程通过PSO与KF进行耦合得到的PID控制流程,如图3所示。通过科尔曼滤波器来达到气门升程调控系统的干扰与噪声滤波功能,再把结果反馈至输入端,采用PSO优化PID控制器的各项参数。利用PSO以随机方式生成粒子群,再利用粒子对PID控制器kp、ki、kd进行赋值,根据控制系统模型获得最佳控制参数,并判断是否满足设计条件,当结果满足时,完成计算过程,反之进一步优化迭代,直到符合要求。
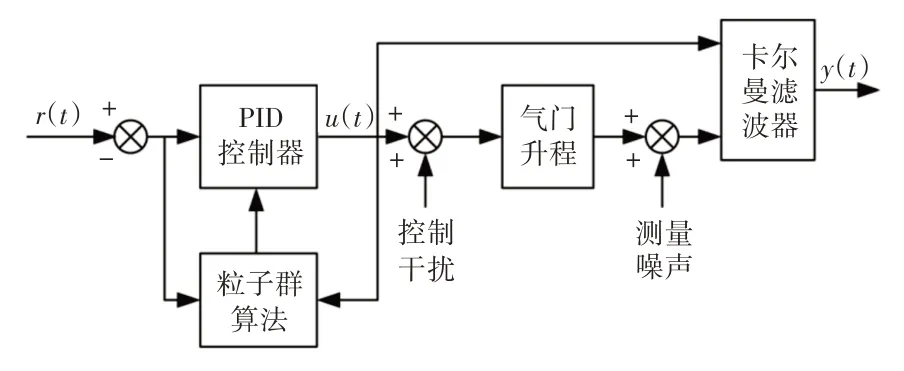
图3 气门升程控制流程图Fig.3 Flow Chart of Valve Lift Control
4 仿真及分析
为比较经过改进前后的PID 控制器性能,以Matlab 软件对气门升程、速度、加速度实施仿真测试,再跟改进前对比。在发动机转速Ne=3000r/min以及气门升程Lf=12.0mm的条件下,分别以传统与改进后的PID方法进行测试时,气门升程、速度与加速度跟踪情况,如图4、图5所示。平均误差统计,如表1所示。

表1 平均误差统计Tab.1 Average Error Statistics
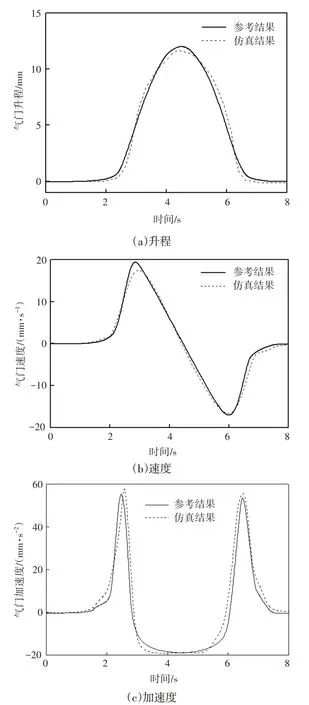
图4 PID控制下气门运行参数跟踪Fig.4 Tracking of Valve Operating Parameters Under PID Control


图5 PSO和KF改进PID下气门运行参数跟踪Fig.5 Tracking of Valve Operating Parameters with PSO and KF Improved PID
图4显示,以传统PID方法进行控制时得到了较大的气门升程、速度与加速度跟踪误差。图5显示,通过改进PID方法进行控制时,气门升程、速度与加速度都达到较低的跟踪误差,仿真结果与参考结果直接的误差更小,具体误差表格,如表1所示。由此可见,综合运用PSO以及KF进行优化时,能够实现对液压驱动系统的高效控制,不会引起气门落座的大幅波动或突变的情况,从而提升了跟踪的精度。这进一步验证科尔曼滤波器具有很好的干扰与噪声滤波功能,能够有效的对PID控制器信号进行过滤;而且粒子群算法的全局最优快速搜索能力保障了PID控制器的工作效率以及稳定性。这里设计的PID控制器充分融合了PSO和KF的自身优势,有效提高了气门升程调控能力。
相比较文献[14]的结果,这里的研究使得计算效率进一步提升,精度提高了10%左右,取得了很好的气门运动跟踪效果。
5 结论
(1)这里结合PSO 和KF的优势,设计了一种可变阀驱气门运动跟踪PSO和KF改进PID控制器。通过KF达到气门升程调控系统的干扰与噪声滤波功能,利用粒子对PID控制器赋值,完成计算。
(2)运用PSO以及KF优化能够实现对液压驱动系统的高效控制,不会引起气门落座的大幅波动或突变的情况,从而提升了跟踪的精度。