外部激励下齿轮箱振动分析与动应力评估
2023-07-27张建超胡玉飞
张建超,胡玉飞,陈 湛,王 军
(1.石家庄铁道大学省部共建交通工程结构力学行为与系统安全国家重点实验室,河北 石家庄 050043;2.石家庄铁道大学机械工程学院,河北 石家庄 050043)
1 引言
齿轮箱作为高速动车转向架的关键部件之一,其可靠性直接影响着列车的运行安全[1-2]。高速动车齿轮箱箱体采用了铝合金材质,轻合金材料的应用带来了簧下结构的轻量化,但同时也出现了齿轮箱箱体结构疲劳强度不足和应力集中等问题,在一定程度上影响齿轮箱应用的可靠性,进而影响着列车的运行安全性[3-6]。高速动车在运行中齿轮箱承受着齿轮传动和轨道不平顺等极为复杂的内外激励作用,尤其是随着列车运营速度的不断提高以及轮轨关系的不断恶化,齿轮箱处于较为恶劣的工作环境中,从100km/h、200km/h到300km/h,列车时速每提升一个等级,对齿轮箱抗冲击与稳定性等方面均提出更高更严格的要求[7-9]。铝合金箱体在内外激励下出现裂纹的问题时有发生,国内某型高速动车齿轮箱油位观察孔、散热筋附近的裂纹情况,如图1所示。

图1 高速动车齿轮箱箱体裂纹情况Fig.1 Cracks in the Gearbox Case of High-Speed EMU
并且,在列车持续运行情形下,箱体已有裂纹将进一步扩展,不仅会引起齿轮箱漏油,更甚者会致使箱体部分脱落,必将严重影响着列车运营安全。
日本某高速动车齿轮箱箱体破损情况,如图2所示。因此保障齿轮箱的安全性和耐久性是非常重要的[10]。
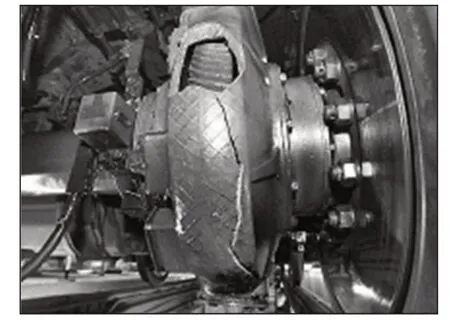
图2 日本某高速动车的破损齿轮箱箱体Fig.2 Damaged Gearbox Case of a High-Speed EMU in Japan
在齿轮箱箱体强度的研究方面,文献[11]以铁路车辆的齿轮箱为研究对象,建立了基于现场试验参数的计算模型,对齿轮箱位移、应变和应力进行了分析与评估,结果表明在现场试验载荷作用下,变速箱满足强度要求,但存在应力集中现象。文献[12]针对某高速动车齿轮箱箱体,以齿轮传动作为箱体内部激励,对齿轮箱极限工况与工作工况进行了强度的有限元分析,结果表明箱体疲劳强度满足设计要求。
文献[13]对在短路和启动两种工况下的高速动车齿轮箱强度进行了仿真分析,其结果验证了箱体在这两种工况都不会出现塑性变形和裂纹。文献[14]以齿轮传动作为内部激励,对城轨列车箱体强度进行了仿真与实验研究,结果表明在正常与超常工况下,齿轮箱箱体的结构强度满足列车运行的要求。文献[15]认为高速动车齿轮箱箱体疲劳是引发结构失效的主要原因,并结合高速动车实际运行工况,对齿轮箱进行了疲劳分析,并采用Smith原理图分析法对仿真结果进行了评价和修正。
在齿轮箱箱体动应力研究方面,文献[16]针对高速动车运用中出现齿轮箱箱体发生裂纹问题对齿轮箱进行了线路测试,认为踏面磨耗状态对于齿轮箱的动应力影响较大,并发现大小齿轮箱联结处的齿轮箱箱体底部是应力薄弱部位。文献[17]建立了齿轮箱箱体和轮对柔性的高速动车模型,以车轮多边形为外部激励对齿轮箱箱体的动应力分布形式进行了探析,结果表明轮对变形对齿轮箱箱体的应力分布具有明显影响。文献[18]建立了考虑齿轮啮合和齿轮箱箱体柔性的高速动车传动系统动力学模型,结合实际工况对齿轮箱箱体的动态特性进行了分析,结果表明车轮多边形磨损对齿轮箱箱体振动具有显著影响。文献[19]研究了多种工况下高速动车传动系统的动力学性能及其与车辆系统主要部件之间的动态相互作用,结果表明轨道激扰和车辆运行速度对传动系统的振动产生明显影响。
从上述研究中可以发现,高速动车齿轮箱箱体在服役中受到复杂的激励力,不仅包括齿轮传动的内部激励,还包括车轮多边形、踏面损伤、牵引扭矩等外部激励。虽然通过仿真计算或线路跟踪实验对齿轮箱箱体强度或动应力进行了较为深入的研究,但是对于轨道不平顺因素对箱体动应力影响相关文献并不多见。这里旨在研究轨道不平顺单一激励对齿轮箱箱体的动应力影响,以高速动车滚振实验台测出的箱体振动信号为依据,对建立的含齿轮箱的高速动车刚柔耦合体动力学模型的系列参数进行优化,进而仿真评估齿轮箱箱体在不同工况下受轨道不平顺激励所产生的振动特性与动应力分布。
2 高速动车刚柔耦合动力学模型
2.1 高速动车多刚体动力学模型建模
依据多刚体动力学理论,将单节高速动车定义为一个非线性多刚体系统,单节高速动车有车体(1个)、构架(2个)、轮对(4个)、齿轮箱(4个)、转臂轴箱(8个)、电机(4个)、C型支架(4个)、轴承(8个)、枕梁(4个)共39个刚体组成。绘制高速动车动力学模型的拓扑关系,如图3所示。

图3 高速动车的动力学模型拓扑图Fig.3 Topological Diagram of Dynamic Model of High-Speed EMU
建立整车几何外形的三维模型,将其引入UM软件中。模型的引入可以使模型更加直观化,并且避免在定义体、铰、力元时因坐标点位的错误而影响仿真结果。UM子系统库中已建立标准的参数化轮对子系统,在搭建模型过程中调用即可。在定义各类体时,多为根据所调用的几何模型,对其进行质量、转动惯量、质心坐标等参数的定义。多体系统中的铰多为对刚体施加约束的方式,从而实现在系统所需完成的运动姿态[20]。高速动车多系统的主要参数,如表1所示。

表1 高速动车系统的主要参数Tab.1 The Main Parameters of the Multi-Rigid Body System of the High-Speed EMU
该高速动车力元有一、二系弹簧、一、二系垂向阻尼、二系横向阻尼、抗蛇形减振器、转臂节点、横向止档等,其中各阻尼的减振形式根据减振类型进行定义,减振特性包括线性力、非线性力、散点特性等。
轮对系统搭建完成后,将其转化为子系统形式,并实现在转向架系统搭建过程中的轮对子系统调用工作。转向架系统搭建完毕后,将其进一步转化为子系统形式;根据实际车辆技术参数设置转向架坐标位置,最终将转向架系统与车体进行定义与联接,从而完成整车动力学模型的搭建工作。转向架系统及整车模型,如图4、图5所示。
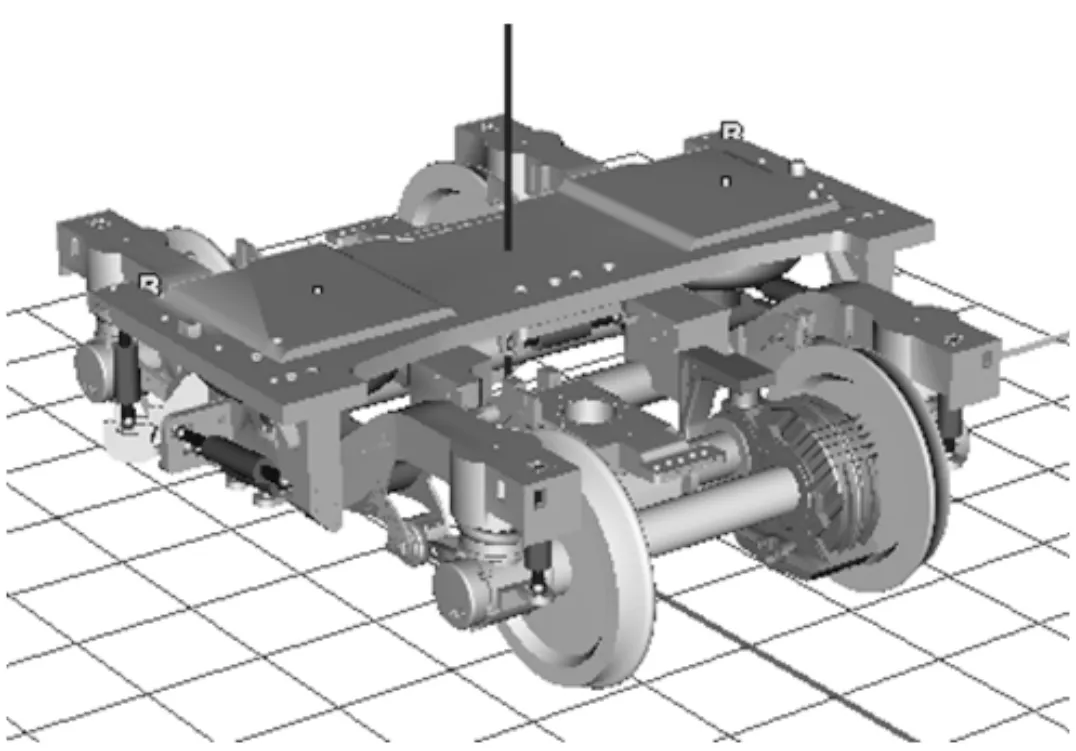
图4 转向架系统模型Fig.4 Bogie System Model
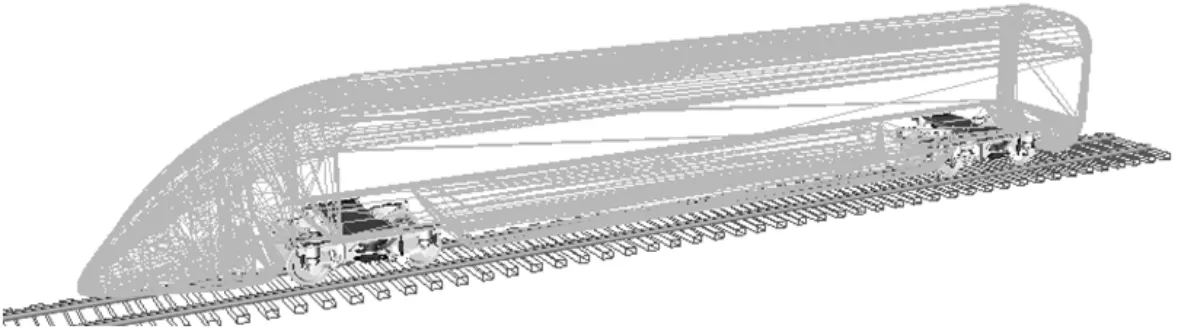
图5 整车模型Fig.5 Vehicle Model
2.2 齿轮箱柔性体导入
将建立的齿轮箱三维模型导入至有限元分析软件中,并进行相应的材料属性定义、网格划分以及刚性区域创建,最后通过命令流提取箱体的模态特征,利用有限元与多体动力学的文件转换接口生成所需的.fum柔性中间文件,在多体动力学建模界面中对柔性中间文件进行进一步转换,最终生成所需的.fss文件。以子系统模式添加至多体动力学软件中,并完成相应的约束工作。其中箱体柔性体模型,如图6所示。

图6 柔性箱体Fig.6 Flexible Box
2.3 轨道不平顺激励
高速动车在运行过程中,由于轨道不平顺的存在,使得车辆易出现异常振动,而且会降低车辆运行品质及乘坐舒适度,尤其当轨道不平顺性较为严重时,会导致轮轨接触关系严重恶化,进而影响列车的运行安全[21-22]。
我国高速铁路不平顺的功率谱[23],如式(1)所示。
式中:S(f)—轨道谱拟合函数(mm2/(1/m));f—空间频率(1/m);
A、B、C、D、E、F、G—轨道不平顺功率谱密度的特征参数。
选用的高速铁路不平顺轨道谱作为轨道不平顺激励,如图7所示。以此用于仿真计算条件与实验条件下齿轮箱箱体的振动特性与动应力评估。
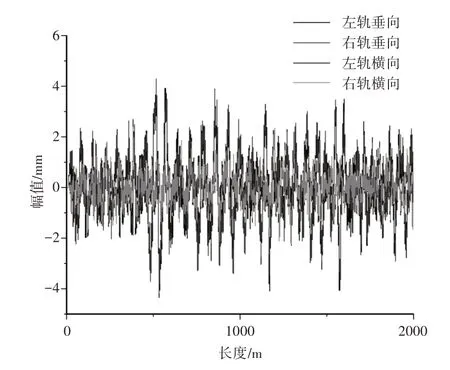
图7 高速铁路不平顺轨道谱Fig.7 High-Speed Railway Uneven Track Spectrum
3 滚振实验与模型参数匹配性调整
为使建立的动车动力学模型能够用于仿真在列车实际运营工况下的齿轮箱工作情形,利用高速动车滚振实验台测出在轨道不平顺激励下的箱体振动加速度,并以此优化所建动车动力学模型的系列参数。
3.1 实验台结构与组成
高速动车滚振实验台结构组成,如图8所示。主要包括单轮及驱动系统、模拟构架、垂向加载作动器、加载框架、轨道轮组、轨道轮激振器、轨道轮驱动系统、冲角调节装置及机座等部分。
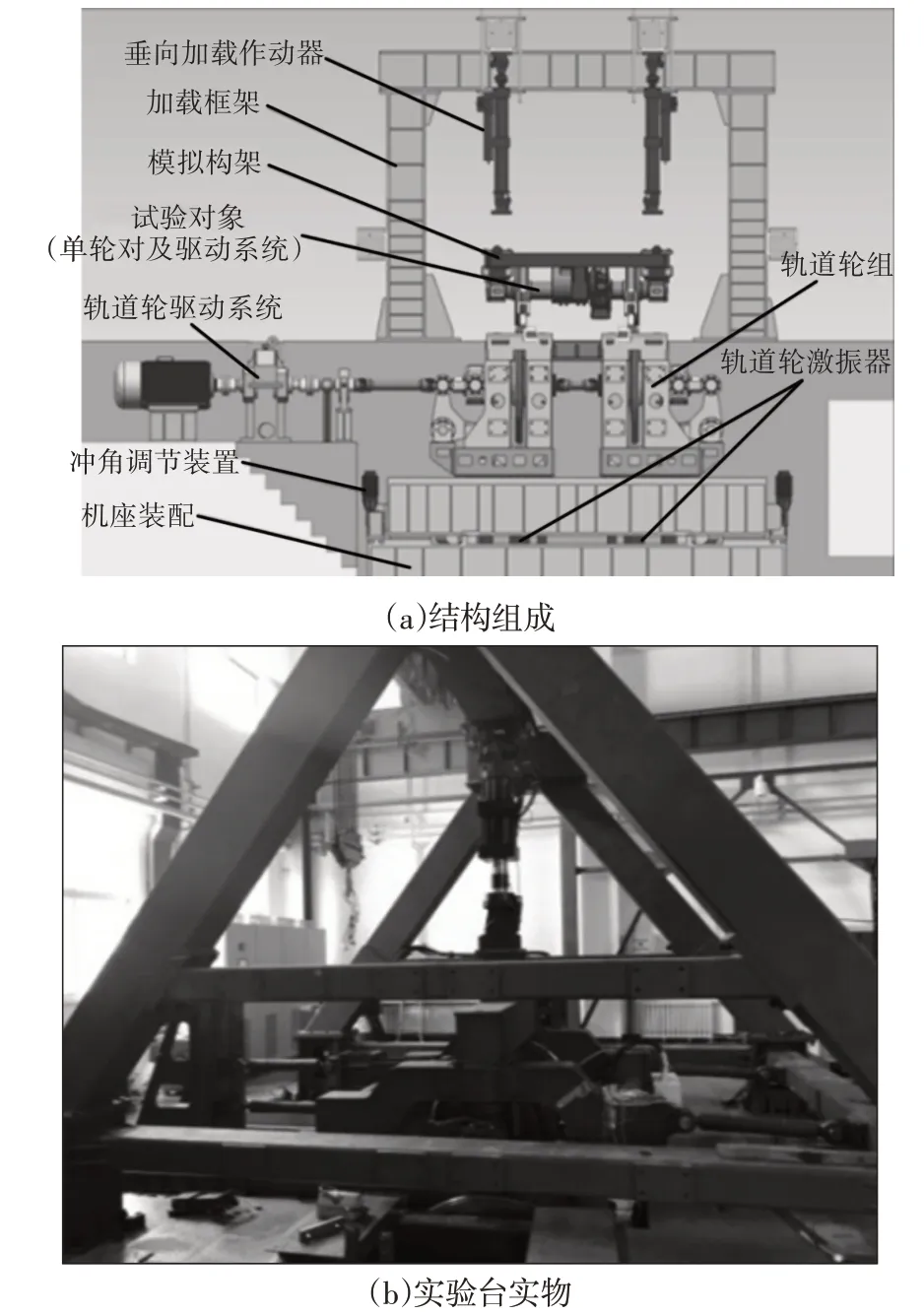
图8 高速动车滚振实验台Fig.8 High-Speed EMU Rolling Vibration Test Bench
利用试验台的轨道轮驱动转向架轮对高速旋转,并应用垂向加载作动器对转向架施加垂向载荷,其载荷大小根据实验工况设定。轨道轮激振器用于设定轨道不平顺的激励特性,并将激振频率信息传递至模拟构架,以此模拟高速动车在不平顺轨道上的高速运行。
3.2 实验方案
本次实验测试对象为某型高速动车齿轮箱箱体,设置传感器测取齿轮箱箱体的垂向振动加速度。
布置在齿轮箱箱体上的传感器测点位置,如图9所示。分别为A点(箱体小齿轮处轴承的正上方)和B点(箱体大齿轮处轴承的正上方)。


图9 齿轮箱箱体上传感器测点布置Fig.9 Sensor Measuring Point Arrangement on the Gearbox Body
为准确探析齿轮箱箱体因轨道不平顺本激励而引发的振动情形,本次实验将列车速度分为低、中、高三个速度等级,分别为100km/h、200km/h及300km/h三种匀速工况,实验采用的转向架轮对为正常无故障轮对,实验作动器垂向载荷设置为10t,选用的轨道谱作为外部激励,如图6所示。
3.3 整车模型参数匹配性调整
鉴于整车模型的参数众多,力元复杂的情况,为使所建动力学模型能够真实反映出齿轮箱的振动特性,对其模型参数进行匹配性调整,以求仿真结果与实验结果的最大程度的统一。
经参数匹配性调整后的转向架系统铰接类型、力元类型与参数,如表2、表3所示。
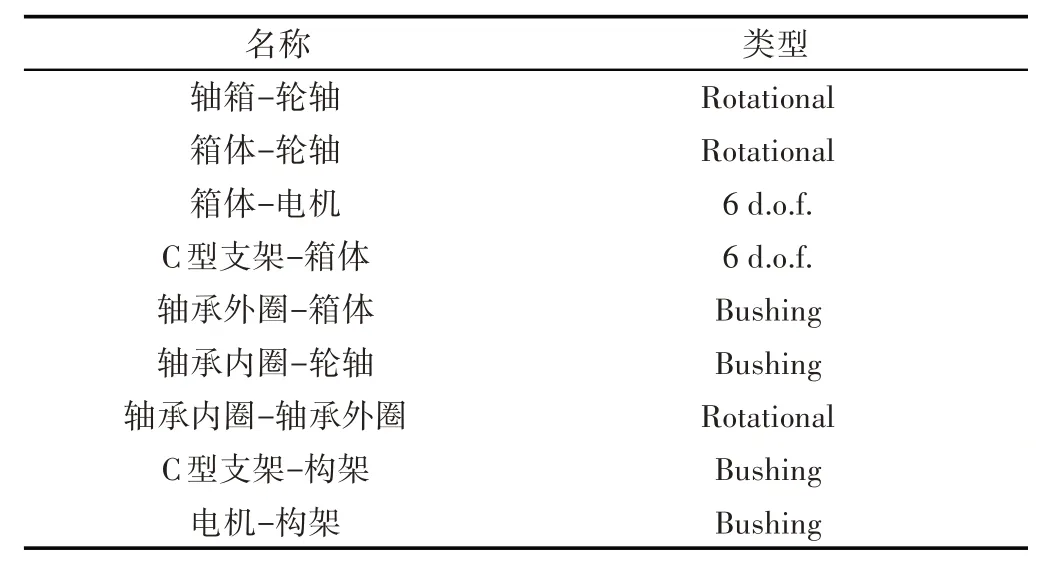
表2 转向架系统主要铰接类型Tab.2 Main Articulation Type of Bogie System

表3 转向架系统力元主要类型与参数Tab.3 The Main Types and Parameters of the Force Element of the Bogie System
3.4 实验与仿真结果
对模型铰接类型、力元数值、转臂节点刚度等多次参数优化后,对齿轮箱箱体的振动情况进行仿真研究。其中A、B测点工况与实验工况一致。可以获得100km/h、200km/h 及300km/h 三种匀速工况下A、B点实验与仿真结果的垂向振动加速度值。其中300km/h匀速工况下的A、B点实验与仿真结果的垂向振动加速度值,如图10所示。

图10 箱体A、B测点垂向振动加速度Fig.10 Time Domain Diagram of Vertical Vibration Acceleration of Box A and B
为便于分析,取上述加速度的均方根值,如表4~表6所示。

表4 100km/h工况下A、B点振动加速度均方根值Tab.4 Root Mean Square Value of Vibration Acceleration at Points A and B Under 100km/h Working Condition
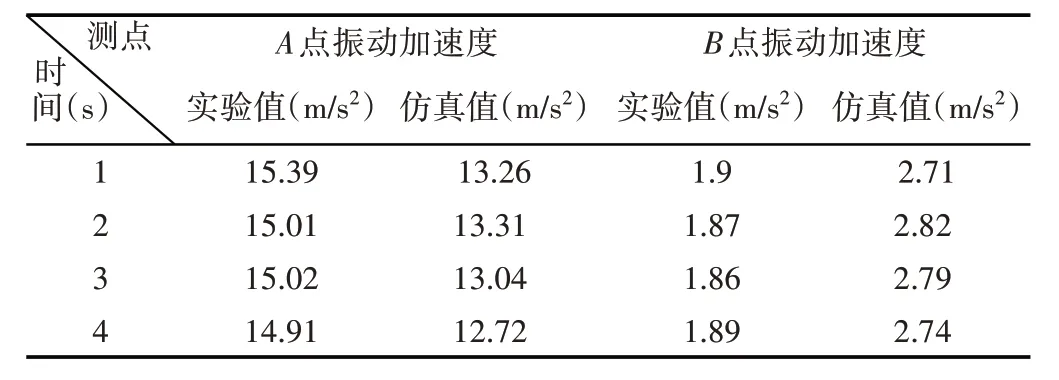
表6 300km/h工况下A、B振动加速度均方根值Tab.6 Root Mean Square Value of Vibration Acceleration at Points A and B under 300km/h Working Condition
在100km/h 与200km/h 工况下仿真结果值均小于实验值。在300km/h工况下,A、B测点垂向振动加速度均方根仿真值略大于实验值,但A、B两测点处仿真值与实验值在变化趋势上保持着较好的一致性,由此增加了仿真结果的可信度。此外,随着列车运行速度的增加,A、B两测点实验值与仿真值主体变化分别呈现出增大的趋势。
将齿轮箱箱体A、B测点处振动信号均方根绘制于点线图中,如图11所示。
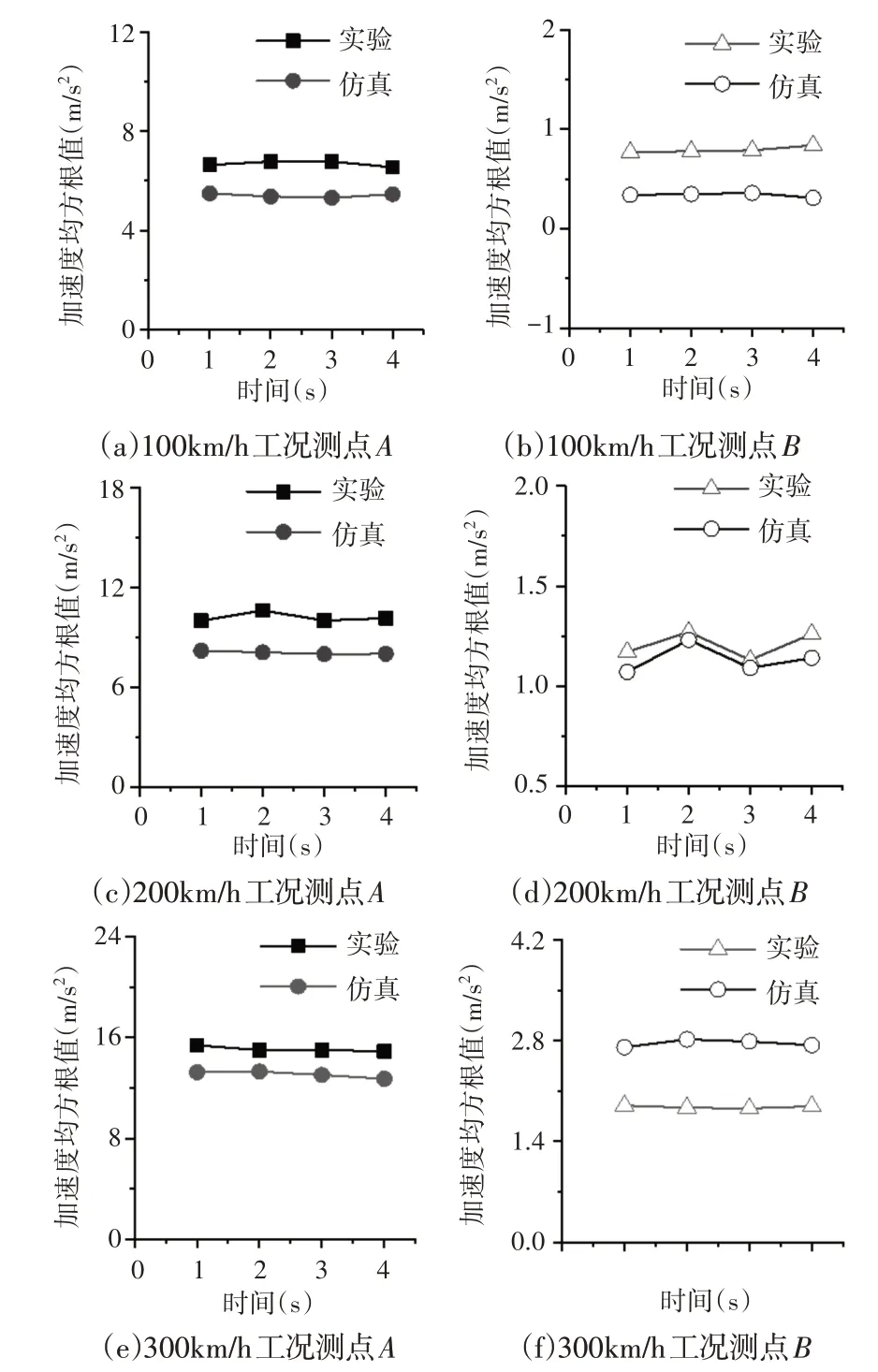
图11 箱体振动随列车速度的变化情况Fig.11 Variation of Box Vibration with Train Speed
由此可知,列车运行过程中在轨道不平顺激励下,箱体小、大齿轮处轴承的正上方的垂向振动情形分别随着速度的增加而增大。其中,A测点处实验与仿真结果值均大于B测点处的实验与仿真结果值,换言之,列车运行过程中在轨道不平顺激励下,小齿处箱体轴承正上方的垂向振动情形要大于大齿轮处。
4 轨道不平顺激励下箱体振动分析
高速动车在实际运营过程中,齿轮箱的体振动信号中所包含的频率类别较多,为便于分析齿轮箱箱体因自身固有特性而引发的箱体振动情形,本节依据齿轮箱箱体A、B测点处垂向振动实验与仿真结果,并结合齿轮箱箱体在约束情形下的模态仿真结果,对齿轮箱箱体的振动特性进行分析。在列车实际运营过程中箱体约束形式主要由大轴承和C型支架与其进行约束联结。
在箱体大轴承座孔位置采用Remote Displacement 对箱体除绕轴向转动自由度外的5个自由度进行约束,如图12所示。在C型支架一侧采用弹性支承(Elastic Support)对箱体横纵垂三向进行约束。

图12 箱体大轴承座孔处约束Fig.12 Restriction at the Large Bearing Seat Hole of the Box Body
约束条件下的箱体模态仿真结果前8阶,如表7所示。对于箱体振型结果,如图13所示。

表7 齿轮箱箱体模态仿真频率Tab.7 Modal Simulation Frequency of Gearbox Housing

图13 箱体约束模态振型Fig.13 Vibration Shape of Box Restraint Mode
由表7 和图13 可知,前8 阶箱体约束模态频带在(500~1500)Hz范围内,在各阶振型中相对较为敏感部位有小齿轮箱体处、大齿轮箱体顶部及底部,而大轴承座孔处振型表现不明显。在A、B两测点中,A测点选取于小齿轮轴承箱体的正上方,对应于振型结果的敏感区域;B测点选取于大轴承座孔箱体的正上方,对应于振型结果的不敏感区域。其中,A、B两测点在八阶振型下的变形量,如图14所示。
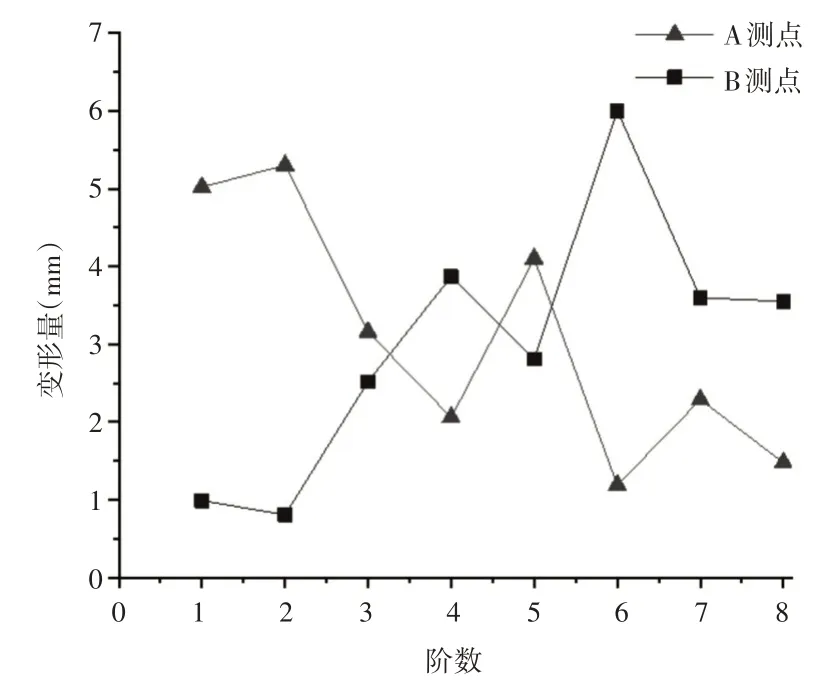
图14 八阶振型下A、B两测点的变形量Fig.14 Deformation of Two Measuring Points A and B in the Eighth-Order Mode
由图14可知A测点处在8阶振型中的第2阶、第1阶模态振型变形量最大,达到了5.30mm和5.02mm,此时对应于振型频率为760Hz与583Hz。B测点处在第6阶与第4阶模态振型中变形量达到了最大,其变形量依次为6.00mm和3.87mm,对应于振型频率为1236Hz和1039Hz。在300km/h工况下的实验与仿真结果频域加速度幅值图,如图15、图16所示。

图15 300km/h工况下测点A的频域加速度Fig.15 Frequency Domain Acceleration of Measuring Point A Under 300km/h Working Condition
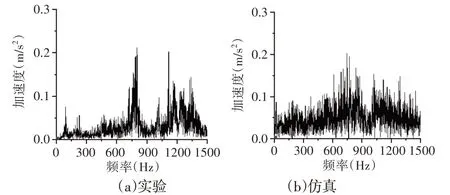
图16 300km/h工况下测点B的频域加速度Fig.16 Frequency Domain Acceleration of Measuring Point B Under 300km/h Working Condition
根据图15 可知,在A测点处(500~1500)Hz 范围内,实验结果中箱体振动频率依次为:583Hz、806Hz、957Hz、1237Hz 及1314Hz,对应于箱体模态结果中,583Hz与箱体的第1阶模态频率583Hz 相一致。1237Hz 趋近于箱体约束模态的第6 阶频率1236Hz。对于箱体振动响应较高的频段范围分布而言,300km/h工况下依次分布在(450~600)Hz、(900~1150)Hz及(1200~1400)Hz频段。由此不难得出,在300km/h 工况下,箱体发生局部共振的频段为(450~600)Hz和(1200~1400)Hz,并且其中包含箱体的共振主频点依次有583Hz和1236Hz。在300km/h 工况下的仿真结果中,箱体振动频率依次为:581Hz、1132Hz 以及1230Hz,其中581Hz 与1230Hz分别与箱体第1阶模态频率583Hz、第6阶模态频率1236Hz相近。在箱体振动响应较高的频段中,主要分布于(450~600)Hz 和(1100~1350)Hz 范围内。由此可知,在(500~1500)Hz范围内,A测点处在300km/h运行工况下箱体振动频率为583Hz与1236Hz。
根据图16可知,在B测点处(500~1500)Hz范围内,实验结果中箱体振动频率依次为:763Hz、1117Hz、1238Hz 及1396Hz。其中763Hz、1236Hz及1396Hz分别于箱体模态结果中的第2阶模态频率760Hz、第6 阶模态频率1236Hz 以及第7 阶模态频率1399Hz 相接近。箱体发生局部共振的频段为(550~900)Hz 和(1050 ~1400)Hz。在300km/h工况下的仿真结果中,所呈现的箱体振动频率主要为770Hz、908Hz、1231Hz及1449Hz,其中770Hz和1231Hz分别与实验结果中的振动主频763Hz和1236Hz成分相近,并且分别对应于箱体模态结果第2阶模态频率760Hz和第6阶模态频率1236Hz。
综上所述,A、B两测点在300km/h工况下,实验结果与仿真结果中箱体振动频率为第1阶模态频率583Hz、第2阶模态频率760Hz以及第6阶模态频率1236Hz。因此,箱体在轨道不平顺激励下处于上述频段范围内时可能使箱体引起较为恶劣的振动。
5 轨道不平顺激励下箱体动应力评估
针对箱体在轨道不平顺单一激励下的应力集中问题的探析,依据齿轮箱输出的载荷文件作为仿真工况,对齿轮箱箱体仅在轨道不平顺激励下的动应力的大小及点位分布进行评估。
设置齿轮箱箱体材料为AlSi7Mg0.3,弹性模量为6.9×1010Pa,泊松比0.3,密度为2700kg/m3[24-25]。依据齿轮箱在实际运营过程中的实际约束形式主要为C型支架的联结约束、联轴器的联结约束以及大轴承处联结约束,对齿轮箱箱体进行网格划分、载荷与边界条件的定义,如图17所示。其中变载荷施加形式以远程力Remote Force 将多刚体动力学模型中得到的X、Y、Z三个方向的分力通过Tabular Data 列表进行施加,Remote Force 施加力的作用点不在箱体上,而是位于箱体大轴承孔的中心位置,通过该施加方式能够贴近箱体的实际受力方式。在轨道不平顺激励下的三种工况(100km/h、200km/h及300km/h),求解出箱体整体的动应力大小与点位分布。仅在轨道不平顺激励下和三种运营工况下的齿轮箱箱体应力求解结果,如图18所示。
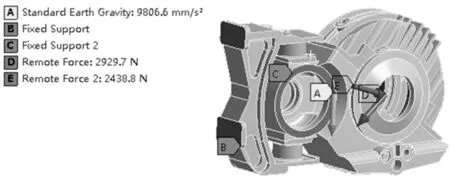
图17 载荷与边界条件的定义Fig.17 The Definition of Load and Boundary Conditions
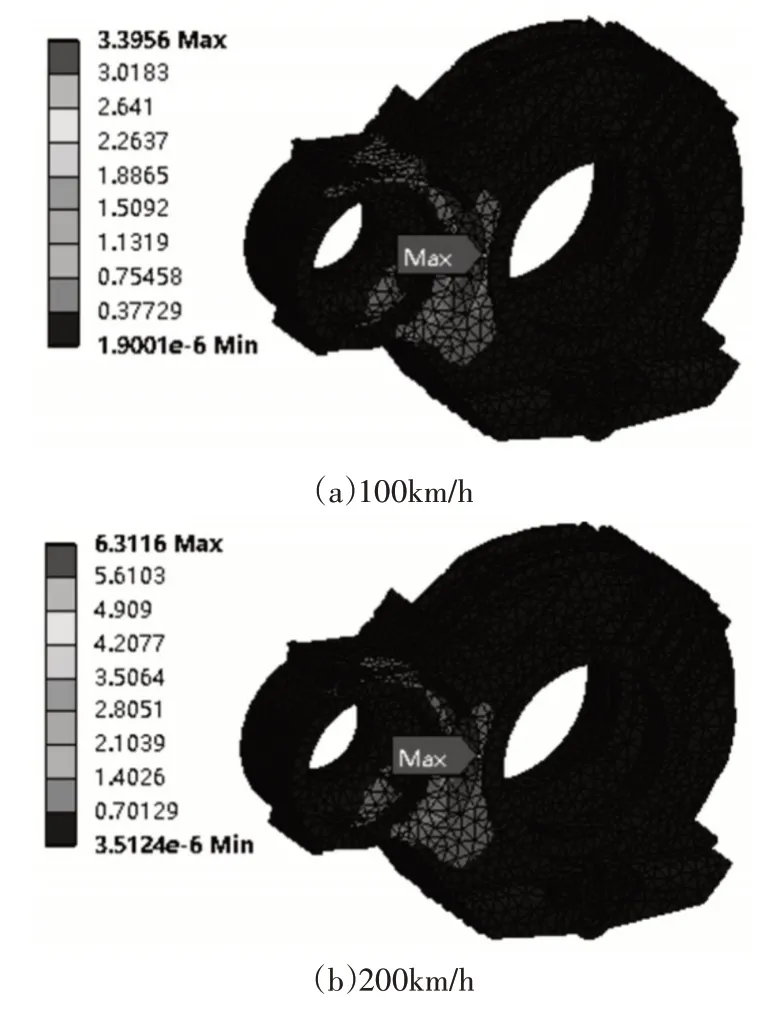
图18 不同速度工况下箱体等效应力云图Fig.18 Equivalent Force Cloud of the Box for Different Speed Conditions
箱体最大应力均发生在小齿轮箱体与大齿轮箱体过渡联接处和小齿轮箱体顶部平面位置,且最大等效应力分别为3.40MPa、6.31MPa、10.09MPa。
并且小齿轮箱体应力集中程度要高于大齿轮箱体,其中小齿轮箱体与大齿轮箱体过渡联接处为应力集中程度较高位置。
因此,齿轮箱箱体仅在轨道不平顺激励下,小齿轮箱体、小齿轮箱体与大齿轮箱体过渡联结处多为应力敏感区。
不同工况下的箱体等效应力大小变化情形,如图19所示。

图19 等效应力大小与分布Fig.19 Equivalent Force Magnitude and Distribution
由图19可知,在100km/h、200km/h及300km/h运行工况下,箱体整体等效应力平均值范围依次为(2.03~2.30)MPa、(3.87~4.29)MPa、(6.81~7.25)MPa,其中最大值范围依次为(3.04~3.40)MPa、(5.5~6.31)MPa、(10.07~10.20)MPa。
因此,随着列车速度的提升,箱体平均等效应力值与等效应力极值均有着明显提高。
综上所述,箱体仅在轨道不平顺激励下,随着运营工况的变化,齿轮箱箱体整体等效应力呈现出随着速度的提高箱体等效应力有增大的趋势。由此得出了轨道不平顺的激励作用对该铝合金箱体的冲击与振动有着一定影响,且箱体仅在轨道不平顺激励下易发生应力集中现象。
6 结论
(1)建立了高速动车刚柔耦合动力学仿真模型,通过滚振实验台对齿轮箱箱体进行振动信号采集,以箱体振动信号的采集结果与动力学模型中箱体上相同测点处的振动信号进行比对,以参数优化方式对动力学仿真模型进一步校验,也进一步验证了动力学模型能够较好地反映列车的实际运行工况。
(2)通过优化后的高速动车动力学模型在相同工况下对齿轮箱体的相同测点处采集了箱体的振动信号,经对比发现了实验结果与仿真结果中小齿轮箱体轴承正上方的振动加速度均大于大齿轮箱体轴承正上方的振动加速度,并且箱体振动频率主要为583Hz、760Hz以及1236Hz,分别对应于箱体的第一阶、第二阶以及第六阶模态。
(3)结合高速动车刚柔耦合动力学模型在不同工况下的仿真结果,进行齿轮箱箱体的动应力评估,结果表明,仅在轨道不平顺激励下,100km/h、200km/h和300km/h 匀速工况的箱体等效应力最大值分别为3.40MPa、6.31MPa 和10.09MPa,齿轮箱箱体的应力大小随着速度增大出现了增长趋势,其中应力主要集中于小齿轮箱体与大齿轮箱体过渡联结区域。由此得出了轨道不平顺性对齿轮箱箱体的振动、冲击以及应力集中具有一定的影响。