VMD模糊熵和SVM在柱塞泵故障诊断中的应用
2023-07-27励文艳赵立红
韩 露,程 珩,励文艳,赵立红
(1.太原理工大学新型传感器与智能控制教育部和山西省重点实验室,山西 太原 030024;2.太原理工大学机械工程学院,山西 太原 030024)
1 引言
柱塞泵由于其工作环境、工作压力的原因,其振动信号呈现出非线性非平稳的特性,故障特征不易提取。文献[1]提出EMD分解,将信号按照自身特点分解为几个IMF,每个IMF都具有真实的物理意义。文献[2]提出了基于EMD包络谱分析的柱塞泵故障检测方法,将信号经过EMD分解后求出前几个主要IMF的包络谱,通过对包络谱的分析,判断柱塞泵的工作状态。
EMD分解虽然克服了传统小波分解及小波包分解的需要预设小波基等问题,但也存在着模态混叠等问题,对故障诊断结果造成影响。文献[3]在轴承的故障诊断中加入了峭度分析用于确定带通滤波参数,然后解调后得到故障特征频率,实现了轴承的早期故障诊断,验证了采用峭度分析的特征提取方法在故障诊断中的可行性。文献[4]将VMD应用在风电机组故障的诊断中,利用VMD对低频信号的鲁棒性强的特点对信号进行分析,分析数据表明VMD 可以有效抑制风电机组冲击信号所产生的模态混叠,通过结果验证了VMD在故障诊断中的可行性。
文献[5]利用模糊熵可以准确地度量时间序列的复杂度的特点,将模糊熵应用于滚动轴承进行故障诊断,利用模糊熵对时间序列变化的敏感性,将信号经VMD分解,计算IMF的模糊熵作为特征向量进行故障识别,准确率可达100%,验证了模糊熵在故障诊断中的可行性。
文献[6]为了克服常用的BP神经网络算法所产生的易陷入局部最小值等因素,分别采用了传统遗传算法与自适应动态调整权值和阈值区间的多子代遗传算法。
结果表明,多子代遗传算法具有更高的学习精度和更快的收敛速度。但应用时,BP神经网络的优化过程较为繁琐且需要掌握优化算法的先验知识。文献[7]使用优化算法对SVM的参数进行优化,将其应用在轴承的故障诊断中成功提高了故障诊断准确率。
为了提取柱塞泵的故障特征,克服EMD所产生的模态混叠现象,提出了一种基于变分模态分解(VMD)模糊熵和支持向量机(SVM)相结合的柱塞泵故障诊断方法,采用VMD对柱塞泵振动信号进行分解,提取其模糊熵作为特征向量输入多分类支持向量机进行故障识别,经过实验验证了VMD模糊熵和SVM相结合的方法在柱塞泵故障诊断中的可行性。
2 算法简介
2.1 变分模态分解
VMD[8]通过预设K值来确定IMF分解的个数,然后自适应地匹配各IMF最佳中心频率和有效带宽,最后获得求解变分问题的最优解。VMD主要包括对信号的构造及求解两部分。
2.1 .1 构造及求解
(1)变分问题是将输入信号f(t)分解为K个模态函数Un(t),并对各个模态Un(t)应用hi lb ert变换求解,然后与预估中心频率e-iωnt进行混合,其中ωn为各IMF中心频率,当各Un(t)之和等于输入信号x(t)的约束条件时,变分问题如下:
(2)使用拉格朗日乘子γ和二次惩罚因子α对式(1)进行改造,得到的新的拉格朗日函数为:
对式(2)进行迭代求解,迭代次数为k,定义好收敛条件,并使用傅里叶等距变换,将迭代后的结果转为频域,解得:
2.1.2 VMD算法步骤
②根据式(3)、式(4)、式(5)更新Un、ωn、γ;
③重复上述步骤,直到满足迭代求解停止条件,即:
式(6)中ε为阈值。经过以上分解步骤,VMD分解后得到k个IMF分量。
2.2 模糊熵
模糊熵[9-10]是一种针对信号复杂度进行度量的方法,信号的复杂度越大,模糊熵值越大。
(1)对于给定的N维时间序列[u( 1) ,u( 2 ),…,u(N)],定义相空间维数m(m<N- 2),重构相空间X(i):
其中,
(2)定义窗口向量X(i)和X(j)的最大绝对距离为dm
ij,即:
(3)定义函数∅m:
(4)定义模糊熵:
当数据集N有限时,模糊熵表示为:
2.3 支持向量机
支持向量机是一种新的机器学习方法,目的是寻找一个最优的超平面来对样本进行分割,分割的原则是间隔最大化。
(1)如图1(a)所示,在进行线性分类时,一个样本集:
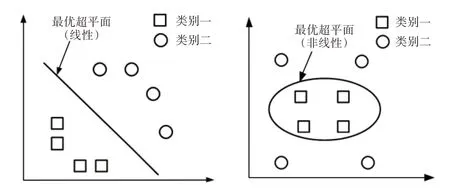
图1 最优超平面示意图Fig.1 Schematic Diagram of Optimal Hyperplane
该样本集存在分类超平面wx+b= 0能够将样本按照正确的方式划成两类,这时称样本集是线性可分的。
(2)在进行常见的非线性分类时,如图1(b)所示常用的方法是将原输入空间的样本映射到高维的特征空间中,然后在高维空间中构造最优分类超平面,最后实现非线性的分类。
西北大灾荒曾经持续约有三年,遍及四大省份,当时二十三岁的斯诺,本是到东方来寻找 “东方的魅力”的。但在绥远,他有生以来第一次看到人们因为没有吃的而活活饿死。有许多人本可以不死的,但许多土地荒芜,集中在官僚地主手中,赋税繁重,商贩囤积粮食,军阀干扰赈济物资的运输。当共产党出现在西北时,受到广大群众的拥护,因为他们带来了希望和自由。共产党在西北推行了一系列经济改革措施,例如重新分配土地,取消高利贷,取消苛捐杂税,消灭特权阶级。这些改革无疑都是考虑到农民自身的利益需求,改善农民的生活水平,他们在谈到苏维埃时用的是 “我们的政府”。
3 仿真分析
考虑到柱塞泵工作时的振动信号为非线性非平稳信号,许多常见信号处理方法对该类信号效果不明显。
故本节加载一段非线性非平稳信号来进行仿真,通过短时傅里叶变换、小波变换、EMD分解、VMD分解四种方法对仿真信号进行分析,并比较时频分辨性能,目的是为了寻找针对此类信号合适的信号处理方法。
仿真信号x(t) 由两段不同频率的余弦波组成,30Hz频率发生在(0~1)s,50Hz 频率发生在(1~2)s。信号函数表达式如下所示:
式(14)中,t1ϵ 0~1s,t2ϵ 0~2s。采样频率为1000Hz。
对式(14)采取以上四种方法进行分析,得到四种方法下的时频谱图,如图2所示。图(2)显示,四种信号处理方法均能在其时频谱图中观察到原始信号中存在的两个频率分量,但时频谱的细节存在较大差异。

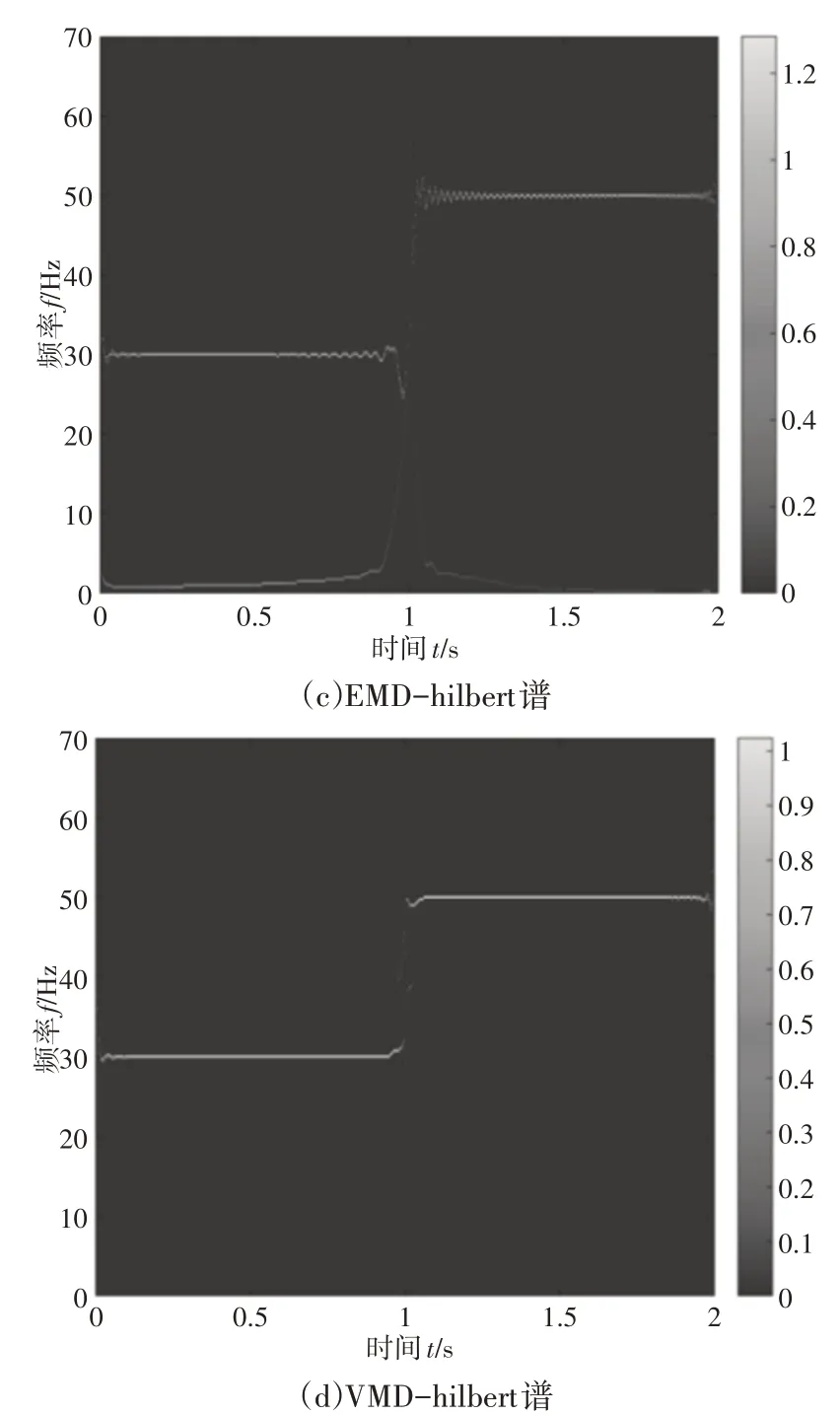
图2 四种处理方法的时频谱Fig.2 Time Spectrum of Four Processing Methods
图2 (a)中,信号经过短时傅里叶变换过后的时频谱的两个频率显示频带较宽,1s处的频率突变节点较为模糊,且50Hz段信号的时频谱发生了明显的前移现象,时频分辨率很低,经验证对该类信号作用效果不强。图2(b)中,信号经过小波变换后的时频谱效果从图中直观来看要优于短时傅里叶变换,但其时间突变节点也较为模糊,且高频段频带过宽,难以确定准确频率,时频谱整体表现出小波变换在低频处时间分辨率较低,高频处频率分辨率较低的特点,经验证对该类信号作用效果也不强。图2(c)中,信号经过EMD分解并重构,采取Hilbert变换后得到的Hilbert谱中可以清晰看出两个频率的频带,频率分辨率较高,对频率突变点的描述也更加准确。虽然由于数据长度及出现频率突变,对Hilbert谱产生了一些低频干扰频率,但是对于Hilbert谱中具有良好的时频分辨率的效果来看可忽略不计,经验证对该类信号比较适用。图2(d)为信号经VMD分解并重构得到的时频谱,为和EMD做对比,故选取hilbert 变换。VMD-Hilbert 谱中,两组频带均较窄,频率分辨率较高,1s处的频率突变点较为清晰,经验证对该类信号比较适用。综上所述,EMD分解和VMD分解对非线性非平稳信号均具有很好的分析能力。
4 实验研究
4.1 实验搭建
为了验证基于VMD模糊熵和SVM故障诊断方法的可行性,搭建的实验平台采集柱塞泵的振动信号,如图3所示。
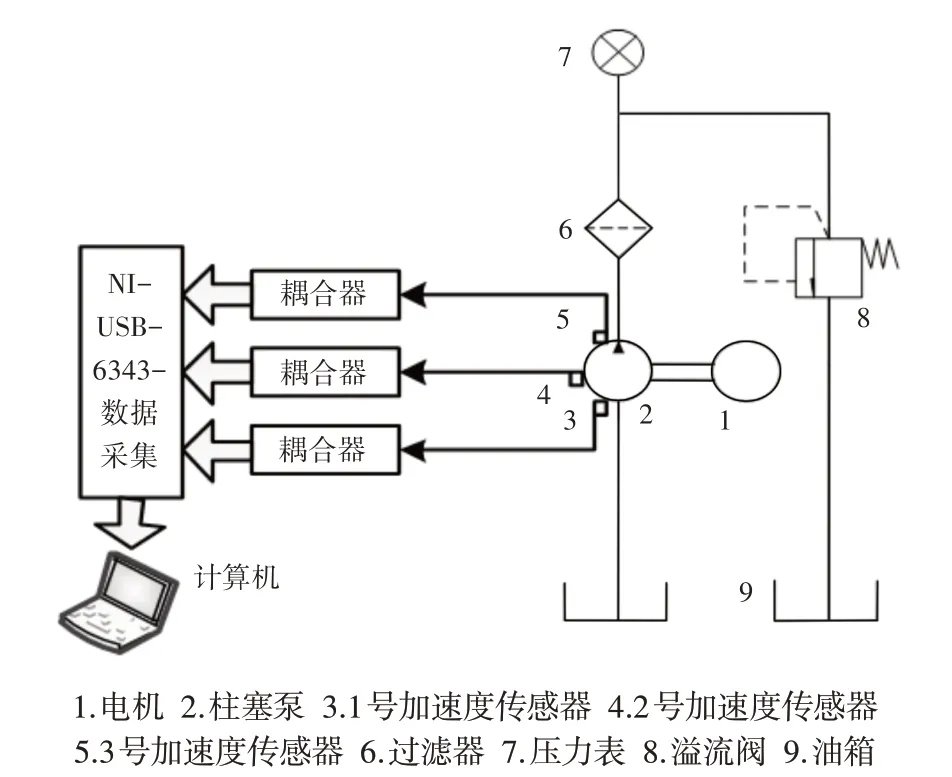
图3 柱塞泵实验系统原理图Fig.3 Schematic Diagram of the Plunger Pump Experimental System
实验对象为斜盘式轴向柱塞泵A10VSO45,柱塞数为9,压力为15MPa,电机转速为1480r/min。
三个加速度传感器位置,如图4所示。其加速度传感器各方向,如表1所示。

表1 加速度传感器方向展示Tab.1 Direction Display of Acceleration Sensor
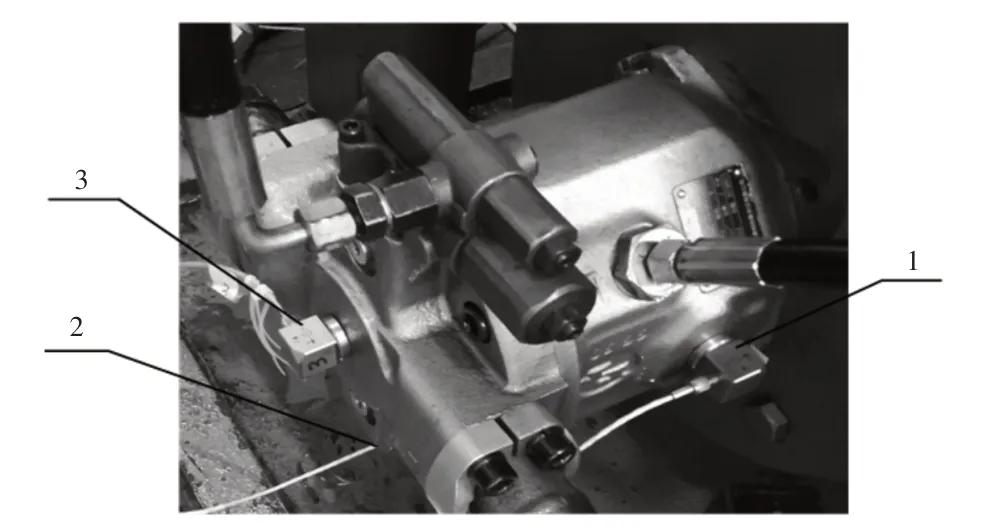
图4 加速度传感器测点图Fig.4 Acceleration Sensor Measurement Points
采用三轴加速度传感器采集泵壳体产生的振动信号。加速度传感器型号为KISTLER(8795A5)。
4.2 数据采集
实验首先用正常状态采集振动信号,然后采用故障部件替换正常部件的方法人为模拟故障状态,最后共采集正常,滑靴磨损,松靴,柱塞磨损四种状态的振动信号。
设置采样频率为24kHz,采样时间1.5s,在计算样本时,每个样本截取0.5s的数据进行分析,数据分析点为12000点,每种状态采样40组信号。
信号经传感器、耦合器、数据采集仪存储于计算机中。应用MATLAB平台对信号进行算法编程及分析,四种状态频域图,如图5所示。
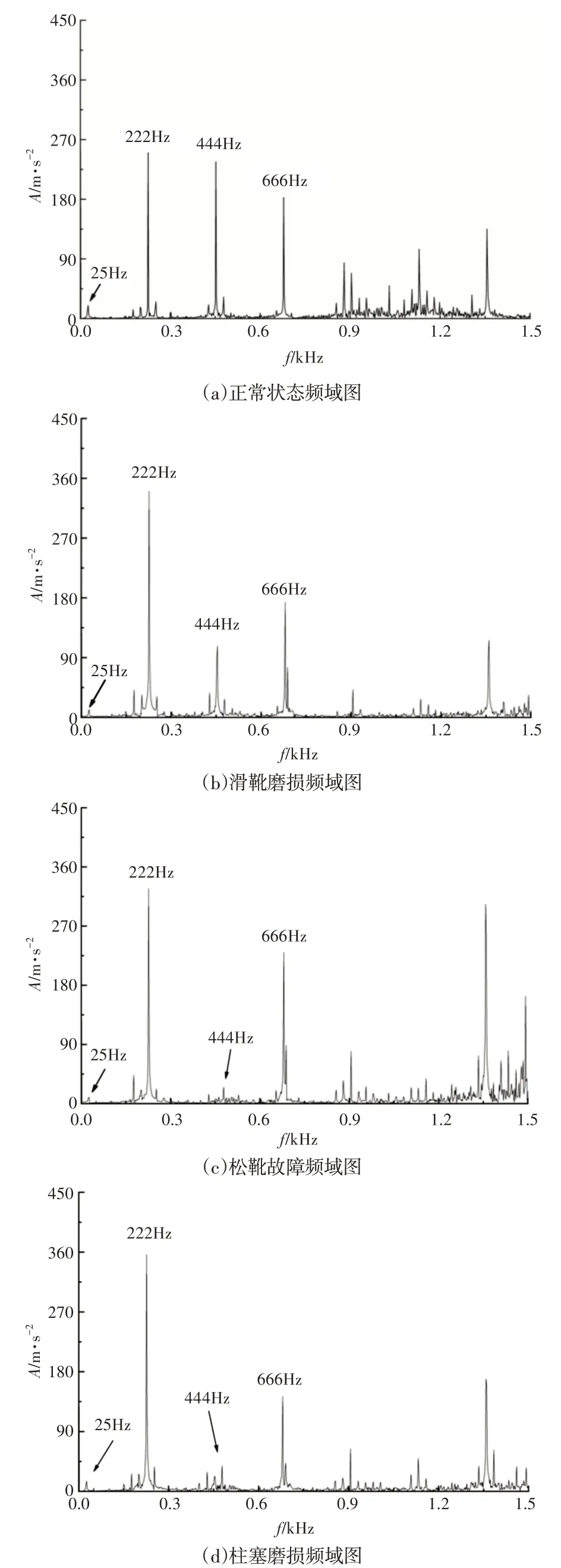
图5 四种状态下频域图Fig.5 Frequency Domain Diagram in Dour Dtates
四种状态均可以看出柱塞泵基频25Hz、供油脉动频率222Hz及其倍频,采用传统的傅里叶变换观察频谱的方法无法区分柱塞泵故障。
5 故障特征提取
5.1 信号分解
经上文仿真验证,EMD和VMD均可应用于非线性非平稳信号。为验证EMD 和VMD 的优劣,通过实验数据来进行区分。VMD分解认为,信号是由不同频率的子信号组成的,VMD受到参数K的影响较大,K值直接决定了分解得到的IMF个数。K值过大,会产生过分解,K值过小,会产生欠分解,均会影响IMF包含的信息。为了确定K值,提出了基于峭度分析的IMF个数确定方法。由于篇幅有限,下面以滑靴磨损信号为例,介绍K值的确定方法,取0.5s的滑靴磨损信号经VMD分解后各IMF的中心频率,如表2所示。
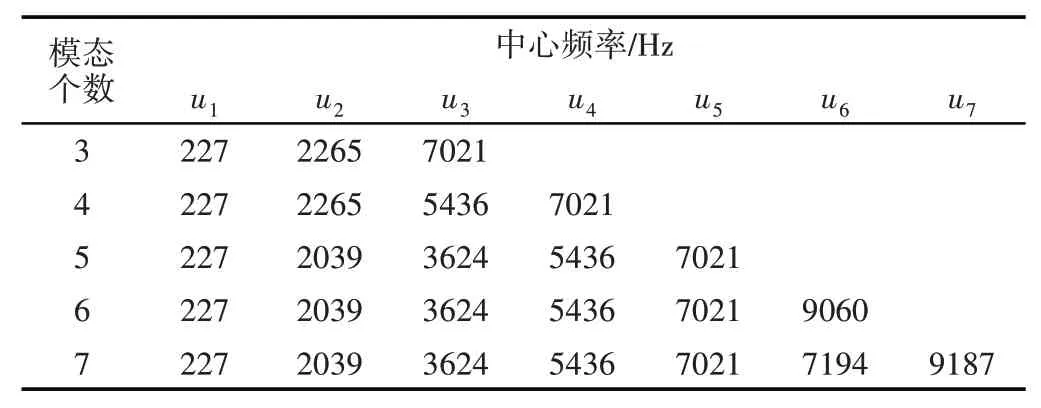
表2 不同K值的中心频率分布Tab.2 Center Frequency Distribution of Different K Values
当K取5时,各IMF之间虽然均围绕中心频率分布,但丢失了高频模态,出现了欠分解现象;当K取7时,u5与u6中心频率接近,产生了过分解;K取6时,各IMF的中心频率值均匀增长,未丢失高频模态以及未产生模态混叠,故VMD参数K确定为6。
由于EMD方法自身分解的特性,易产生模态混叠,严重影响故障诊断的准确率。为验证VMD相较于EMD在抑制模态混叠方面的优势,取0.5s滑靴磨损信号经过VMD 和EMD 分解,时域及频域图,如图6所示。

图6 VMD分解模态分量时域及频域图Fig.6 Time Domain and Frequency Domain Diagrams of VMD Decomposition Modal Components
由图6可知,两种信号分解方法均对具有非线性非平稳特性的柱塞泵振动信号具有自适应性,可将原始信号分解为若干子信号,故两种方法均可应用于柱塞泵的信号分解。
但观察各个IMF后得知:信号经VMD分解后,各IMF均围绕某一个中心频率,未产生模态混叠;信号经EMD分解后,在IMF1位置处产生了模态混叠,各频率交错在一起。
结果表明,VMD分解可以抑制EMD产生的模态混叠,在信号分解方面具有优越性。
5.2 特征提取
故障的特征向量可以表达出故障发生时的状态信息,其选择的优劣直接决定了故障分类的精度。VMD分解得到的IMF包含了不同频段的信息,为了度量不同IMF的信息丰富程度,引入峭度值来分析IMF。
峭度是无量纲参数,对冲击信号较为敏感,常用于机械故障诊断。当柱塞泵故障不断加重时,振动信号峭度值随之增大[11]。故峭度值可以作为衡量故障严重程度的指标。不同状态下信号峭度值计算结果,如表3所示。
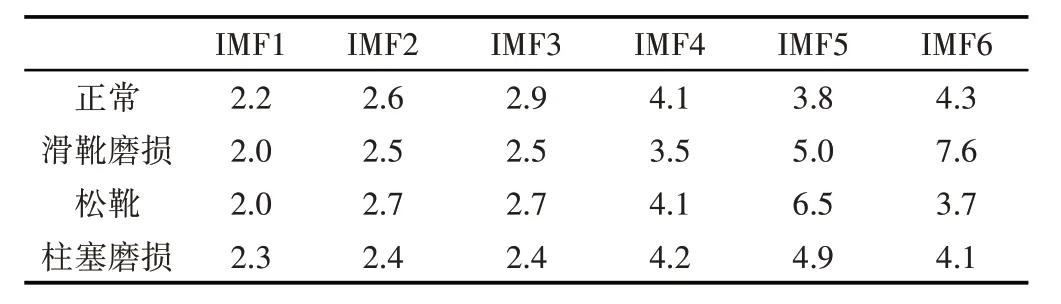
表3 IMF峭度值Tab.3 IMF Kurtosis Value
对分解后的6个IMF进行峭度分析,计算峭度值较大的3个IMF的模糊熵作为特征向量。
6 结果分析
6.1 SVM故障识别
将模糊熵作为特征向量,每种状态共40 组样本,随机选取25组作为训练集,15组作为测试集,将每种状态下的模糊熵输入到SVM进行故障识别。考虑到核函数及相关参数对模型性能的影响,采用RBF核函数,利用交叉验证的方法搜寻最佳的参数惩罚因子(参数c)和RBF核函数中的方差(参数g)。采用寻优后的最佳参数组合来训练模型。分类结果,如图7所示。1、2、3、4分别代表正常、滑靴磨损、松靴、柱塞磨损。

图7 SVM分类结果Fig.7 SVM Classification Results
诊断结果显示,故障诊断准确率达到了98.3%,其中一个正常信号被误诊为松靴信号。
6.2 诊断精度对比
为了验证VMD模糊熵相较于EMD模糊熵分类精度,将其分别输入SVM进行诊断。为了验证SVM的分类优势,将其与常用的BP神经网络进行对比。
为了避免偶然性,每种实验方法结果均取运行20次后的平均值,诊断结果,如表4所示。

表4 方法准确率对比Tab.4 Comparison of Method Accuracy
结果表明,所采取的VMD 模糊熵-SVM 相较于EMD 模糊熵-SVM准确率具有更高的准确率,证明了VMD的优越性;所采取的VMD模糊熵-SVM相较于VMD模糊熵-BP神经网络具有更高的准确率,证明了SVM的优越性。故所采取的VMD模糊熵与SVM相结合的故障诊断方法在液压泵的故障诊断上具有一定的可行性。
7 结论
(1)VMD作为一种新的信号分解方法,经验证不但在处理非线性非平稳信号中具有优势,而且可以消除传统方法EMD所产生的模态混叠;模糊熵对时间序列复杂度的变化具有较强的敏感性,利用峭度分析,选取VMD分解后IMF的模糊熵作为特征向量可以准确地提取出故障特征。
(2)结合VMD和模糊熵各自的优势,采用SVM对故障进行故障识别识别,准确率可达98.3%。将VMD模糊熵-SVM分别与EMD模糊熵-SVM、VMD模糊熵-BP神经网络对比,验证了VMD模糊熵-SVM方法的优越性。
(3)VMD与模糊熵相结合的方法在提取柱塞泵故障特征中效果显著,为故障诊断提供了一种新的方法,可以应用到其他旋转机械的故障诊断中,具有一定的工程实际意义。