基于红外光谱成像的危险气体泄漏检测技术综述
2023-07-26曹江涛李泉成班铭刘继臻姬晓飞
曹江涛, 李泉成, 班铭, 刘继臻, 姬晓飞
(1.辽宁石油化工大学信息与控制工程学院, 抚顺 113001; 2.沈阳航空航天大学自动化学院, 沈阳 110136)
随着石油、煤炭、化工等工业的不断发展,人们在生产活动过程中会不可避免地接触到一氧化碳(CO)、甲烷(CH4)、乙烯(C2H4)、氨气(NH3)、氯气(Cl2)、六氟化硫(SF6)等可燃或有害气体。若不能在这些气体发生泄漏后及时发现并处置,就有可能酿成火灾、爆炸或人身中毒、窒息等恶性事故,使人民群众的生命财产安全产生严重损失。此外,燃料不充分燃烧、催化转化装置失效等情况会导致尾气中二氧化硫(SO2)、氮氧化物(NOx)等有害气体含量超标,对人体健康和大气环境产生不利影响[1]。由此可见,气体检测在工业生产中有着十分重要的作用,是杜绝事故、保证企业安全生产的关键,是生产人员与周边群众安全的保障。
在常用的气体检测方法中,传统的点传感器价格低廉,但有与气体发生化学反应、需频繁标定等不足之处;基于红外吸收光谱技术的检测方法能够进行无接触检测和浓度分析,具有精确度高、安全性高、维护简便等优点。而红外光谱成像技术能够在远距离、大范围地将泄漏气体可视化并进行监测,适用于广域监控,具有广阔的应用前景。现从现有气体检测技术对比、红外成像原理与硬件构成、泄漏气体图像可视化及成分浓度分析、气体泄漏自动检测算法等方面对红外光谱成像技术在气体检测方面的研究进行介绍,并对技术难点与发展趋势进行总结。
1 现有气体检测技术
用于可燃气体检测的传感器的研究最早可追溯到19世纪初的催化燃烧式传感器。经过两个世纪的发展,现在主流的气体传感器根据原理可分为催化燃烧式[2-3]、半导体式[4]、电化学式[5]和红外吸收式,其原理及优缺点如表1所示[6]。
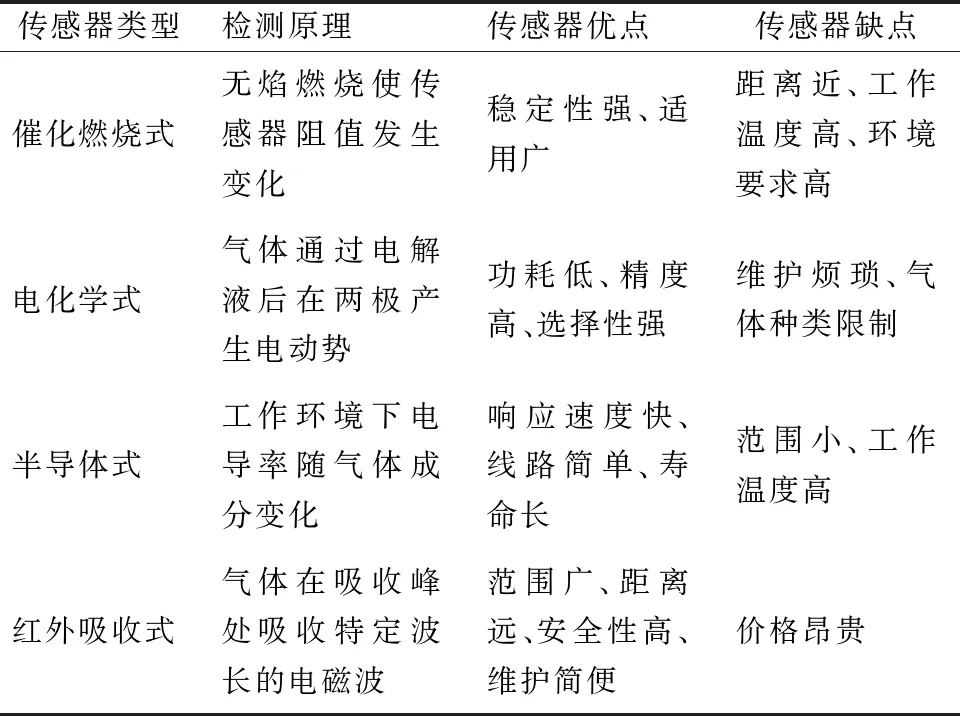
表1 气体传感器原理及特点[6]
基于红外吸收光谱的气体检测系统具有精度高、速度快、不发生化学反应等优点,能够在不接近泄漏点的情况下,准确地识别出气体的类别和浓度分布[7],缩短了反应时间,是一种效率高、维护成本低的气体检测方式。常用的红外气体传感器又可分为差分吸收光谱法、光腔衰荡法和傅里叶变换红外光谱法等。
(1)差分光学吸收光谱法:差分光学吸收光谱技术最初由Platt等于1979年提出[8]。分光器将特定波长的激光束分成两束,一束探测光束通过吸收池,另一束参考光束直接被探测器接收。被吸收池中的气体分子吸收后的光束在某些波段内有所减弱,利用光谱仪和探测器将光束的光信号转换成为电信号后,将两组信号相减以测定吸收率。该技术响应速度快、精度高,常用于空气污染物监测[9-10]。
(2)光腔衰荡光谱法:该方法使用高精度光学谐振腔以增加有效吸收程,通过测量衰荡时间来测量样品的吸光度。其结果不受光源波动的影响,是一种灵敏度显著高于传统吸收光谱的检测技术,被广泛应用于低浓度气体的测量。李青原等[11]采用光腔衰荡光谱技术实现了对病人呼气中异戊二烯的10-6级高灵敏检测。
(3)傅里叶变换红外光谱(Fourier transform infrared,FTIR)技术,是基于迈克尔逊干涉仪的双光束干涉技术,属于远距离光学遥测技术,可用于高浓度气体排放的在线监测[12]。在检测过程中,仪器的红外窗口覆盖了大部分分子波段,因此傅里叶变换红外光谱技术能够较好地应用在多组分气体的检测中[13]。傅里叶变换红外光谱技术对于空气中高浓度挥发性有机物的测量精度高、稳定性好;但是检出限高,在对空气中低浓度气体进行测量时会产生较大的误差[12]。
红外成像方法比传统点式仪表更智能,具有不与气体直接接触、报警时间短、可远距离监测、能将泄漏可视化等优点。运用计算机视觉技术对红外光谱图像进行处理,能够实现精确定位泄漏源、分析气体浓度、自动报警等功能,适用于化工园区、危险气体输送等场所的泄漏检测和气体浓度分析。下面对红外光谱成像及检测算法等关键技术进行详细介绍。
2 红外光谱成像原理与硬件简介
2.1 红外吸收光谱原理
分子吸收光谱主要是分子吸收光子能量加剧原子核振动产生的。由量子力学可以证明,分子的振动总能量为

(1)
式(1)中:υ为振动频率,Hz;h为普朗克常数;n为振动量子数,n=0, 1,2,3,…,分子处于基态时n=0。
当有光子能量(E=hν)恰好等于分子振动能级的能量差(ΔE=Δνhn)的红外辐射照射到分子时,分子将吸收红外辐射并跃迁至激发态,导致振幅增大。
另一方面,构成分子的原子电负性不同而显示出不同的极性,称为偶极子。只有当辐射频率与偶极子固有频率相匹配时,分子才能与辐射相互作用增加振动能。即只有发生偶极矩变化的分子振动才能引起红外吸收。
由上可知,对于指定分子,只有特定频率的辐射才能够激发其中基团的共振,使其吸收光子能量并产生振动跃迁[14]。如果用连续频率的红外光照射样品,由于试样对不同频率的红外光吸收程度不同,通过试样后的红外光在一些波数范围减弱,在另一些波数范围内仍然较强,形成了该试样的红外吸收光谱[15-16]。每种分子的红外吸收光谱由其组成和结构所决定,据此可以对样品进行成分分析和鉴定[17-18]。
2.2 红外光谱成像仪器
在众多红外成像技术中,红外热成像技术首先被用于检测高温/低温气体泄漏[19]。随着光学设备制造工艺的发展,窄通带滤光片逐渐普及,帮助成像仪在指定波段附近成像,增加了成像结果中红外吸收光谱的比重,使得基于红外吸收光谱的成像仪得到广泛应用。与此同时,傅里叶变换红外光谱成像仪因其能够输出具有更多信息的高光谱数据而成了多组分分析的研究热点。
2.2.1 红外热成像仪
任何温度在绝对零度以上的物体都会辐射红外线,辐射强度与物体表面温度成正相关。波长处于大气窗口内的红外线能够进入红外热成像仪,到达焦平面传感器并使其温度发生微变,进而改变其表面电阻。因此,红外热成像仪能够根据物体的红外辐射强度获取其表面温度信息,将人眼无法看见的目标表面温度分布转换成可视图像[20]。
根据以上原理,温度与背景不同的泄漏气体将在红外图像中呈现为与背景不同的亮度,进而被检测到[21]。此外,管道输送的气体通常具有很高的压强[22-23]。根据焦耳-汤姆逊效应(Joule-Thomson effect),高压气体失压时温度会降低(氢气和氦气除外)[24],这一现象使得红外热成像仪能够检测到常温高压气体泄漏。
2.2.2 红外光谱成像仪
红外光谱成像仪的成像原理与红外热成像仪相同,但在光路中加入了红外滤光片或微棱镜阵列[25],使得只有指定波长的红外光能够参与成像。当视野内存在红外吸收峰处于滤光片的通带范围内的气体分子时,感光元件所接收到的红外光线强度将减弱。若光线强度的变化大于光谱仪的灵敏度,输出图像上对应位置的亮度会降低,从而实现对气体的探测[26]。基于光谱成像技术的气云成像摄像机在极端天气下的准确度等方面具有显著优势,适用于对河流穿越、地形地质高危区域、无人值守井场等场所进行远程监控[27]。
2.2.3 傅里叶变换红外光谱成像仪
傅里叶变换红外光谱成像仪是一种基于干涉分光的光谱数据采集系统,具有光谱分辨率高、通光效率高、可凝视成像等特点[28]。
迈克尔逊干涉仪是傅里叶变换红外光谱成像仪的重要组成部分。光线进入干涉仪内部,在分束器P上被分成两束光分别在固定反射镜M1和移动反射镜M2处反射。两束光在分束器P处重新组合,最终聚焦在接收器上。移动反射镜M2时光程差d随之移动,而光束的接收强度E作为光程差d的函数,经傅里叶变换可绘制出光谱图,即多波长合成的零维图像,可视为二维图像上的一个像素。在干涉仪中加入成像透镜,并将接收器换为焦平面传感器,即为傅里叶变换红外光谱成像仪。
如图1所示,入射景物的红外辐射被迈克尔逊干涉仪空间调制,形成原始的时空序列的图像数据立方。将数据立方进行重组、校正、傅里叶变换等处理,得到光谱立方[29]。

图1 傅里叶变换红外光谱成像仪原理图Fig.1 The schematic diagram of Fourier transform infrared spectral imager
相对于傅里叶变换红外光谱成像仪,红外热成像仪与红外光谱成像仪结构简单、维护成本低,用于气体泄漏检测的相关研究较为成熟。
3 泄漏红外图像可视化及浓度分析理论
基于红外成像技术的气体泄漏检测具有效率高、适用场景广、响应时间短等优点[21],已经在手持设备领域得到了广泛的应用;此外,红外成像技术在浓度分析方向的研究也在不断发展中。
3.1 泄漏图像可视化
目前基于红外成像技术的气体泄漏检测已有较为成熟的产品[30],并在石化行业得到了广泛的应用[31]。但现阶段光学气体成像仪产品仅能做到将红外图像可视化,对气体是否泄漏需要进行主观判断,自动化程度低,无法用于自动监测。
3.1.1 红外热成像
1999年,Jach等[19]就尝试使用斯特林制冷的主动红外热成像仪对泄漏的CH4气体进行监测,验证了方法的可行性。近年来,红外热成像泄漏检测技术受到了广泛关注。Liu等[32]设计了一种红外热成像系统,能够在近距离检测到以0.2 L/min速率泄漏的异丁烯(C4H8),拍摄图像及经过指数变换和边缘抑制后的结果如图2所示(背景温度60 ℃,C4H8气体温度22.4 ℃,指数γ=2)。
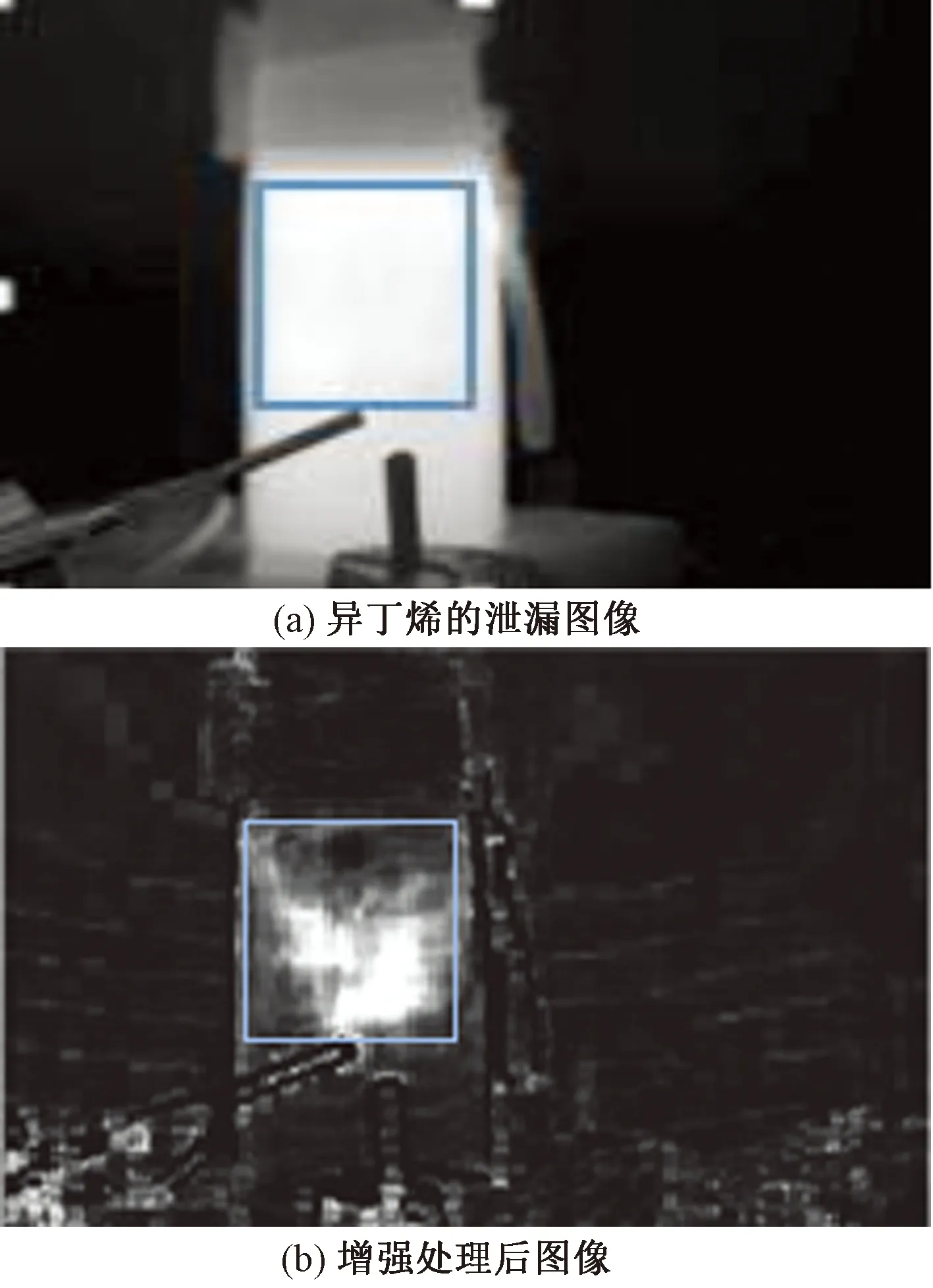
图2 红外热成像系统图像样例[32]Fig.2 Sample images of infrared thermal imaging system [32]
该方法依靠温度差来区分泄漏气体与背景,可使用在高温气体、低温气体和高压气体等场景的泄漏检测。但当气体温度与背景相近时,热成像设备难以对气体和背景进行分辨,无法应用在低压常温气体和缓慢泄漏的情景。此外,在存在蒸汽、热源等温度干扰的场景中使用会出现频繁误报的问题。
3.1.2 红外光谱成像
基于红外吸收光谱的成像设备对指定波长范围的红外光敏感,特异性地增强了相关气体对成像亮度的影响,能够有效弥补红外热成像使用场景受限的问题。
Long等[33]介绍了一种采用窄带滤光片的红外光谱成像仪,并将其用于SF6和二氧化碳(CO2)的泄漏检测。该团队拍摄的CO2泄漏图像如图3所示,其中能够看到明显的泄漏气羽。

图3 CO2气体泄漏图像[33]Fig.3 Leaking image of CO2 gas [33]
基于红外吸收光谱的成像设备具有响应迅速、抗干扰能力强、探测距离远等优点,还可以通过更换滤光片对不同气体进行检测。
3.1.3 傅里叶变换红外光谱成像
对于含有吸收峰不同的气体成分的混合气体,高光谱数据能够在多个波段同时成像,分别分析,进而获得混合气体的成分组成。因而,傅里叶变换成像光谱仪在混合气体检测领域具有特别的优势。
郑为建等[34]、杨智雄等[35]设计了长波红外时空调制高光谱成像仪装置,对乙醚(C2H5OC2H5)蒸气、甲基膦酸二甲酯(DMMP)蒸气、NH3和SF6气体进行了低空探测,实现了对气体云团种类和分布的快速识别。孙秉才等[36]使用FTIR光谱气云成像系统检出了SO2、对二甲苯(PX)蒸气、CH4等7种气体,并以云图的形式展示出了气体扩散轨迹。
上述实验成功验证了基于FTIR成像技术进行多组分气体泄漏检测的可行性,明确了其具有精度高、探测距离远的优点,但仍存在傅里叶变换处理对设备算力有一定要求的不足;文献[34-35]所使用的成像仪通过反射镜扫描的形式在线传感器上成像,对仪器精度、平台震动有一定要求,响应速度较慢;文献[36]采用扫描的方式在单像素探测器上成像,运行速度慢,分辨率低。
3.2 浓度分析理论
根据比耳-朗勃特定律(Beer-Lambert law),对于一段均质气体,入射光束原始光强I0与气体吸收后的光强I满足关系[37]
I=I0e-σNL
(2)
式(2)中:I0和I分别为光束被气体吸收前后的光强,W/sr;σ为分子吸收截面,cm2/molecule;N为被测物质的浓度,molecule/cm3;L为总的气体吸收光程长,cm。
在红外图片中,像素值代表了到达成像仪的红外线的光强I。根据式(2),可结合无气体吸收时的光强I0求出光路中气体的柱浓度,从而实现利用红外光谱成像技术对气体进行定量分析。
赵华等[38]提出,假设水平面的甲烷气体密度分布具有圆对称性,则可利用阿贝尔变换获得其在水平面上的密度分布。焦洋等[39]基于傅里叶变换光谱仪设计了一套红外被动成像系统,对SF6开展了遥测验证实验;通过非线性最小二乘算法结合辐射传输计算反演获得了目标气体的柱浓度,得出了背景谱与样品谱的温度差距越大,反演浓度与实际分布差距越大的结论。Rangel等[40]设计了一个立体相机系统对甲烷气体进行空间成像,用于检测气体的空间浓度和速度,但受设备限制,各相机拍照时间的不同步会严重影响计算结果。以上研究均表明,使用光谱成像技术测量气体浓度具备一定可行性,但由柱浓度推算点浓度需要引入其他假设或更加完善的设备,提高了测量难度。
Turcotte等[41]提出了迭代特征抑制(iterative signature suppression,ISS)方法,将预先确定气体成分的特征加入背景子空间后,使用广义似然比检验(generalized likelihood ratio test,GLRT)重新减去这一信号。该方法能够提高隐藏在气羽中高浓度组分下其他成分的检测精度。
值得注意的是,由于温度对红外成像结果影响很大,而实际场景中气体温度难以控制、环境干扰因素多,现阶段基于红外成像的浓度测量装置难以投入使用。
4 红外光谱图像的气体泄漏自动检测算法
通过光谱成像获得的红外图像数据需要经过处理才能获取气云位置、气体种类和浓度等信息。气体泄漏检测算法的基本流程如图4所示:基于传统方法的泄漏气体检测通常需要经过预处理增强图像、前景提取获得可能的目标区域、特征筛选排除干扰等操作;基于深度学习的算法较为简便,能够直接对输入图片进行检测。最后,在比较算法好坏时,需要确定一些指标对其性能进行评价。

图4 泄漏检测算法处理流程Fig.4 Procedure of leakage detection algorithm
4.1 红外图像预处理
红外成像仪(包括固定焦平面成像仪和傅里叶变换成像仪)输出的红外图像中不可避免地包含一些噪声,而且非制冷型成像仪的噪声比制冷型成像仪更强。Zhang等[42]针对图片中的噪声、网格及死点提出了一种基于形态学自适应时域滤波的增强方法,结合了递归滤波和均值滤波,能够有效去除噪声、大大提高泄漏区域的可见度。Jadin等[43]针对简单背景下气体泄漏设计了一个检测算法,先后对图像进行滤波、二值化、连通域面积筛选等操作,以判断是否存在气体泄漏,最终对自制均匀背景气体泄漏数据集的识别准确率达95%。Wang等[44]设计了一种将目标气体的空间分布显示出来的检测软件。使用小波去噪、图像阈值分割等方法识别光谱图像中的目标气体,并用伪彩色标记后显示出来。
李家琨等[7]针对红外图像噪声大、细节少等问题,分别提出了自适应小波降噪参数优化算法、最小化平方梯度差和算法,能够有效提高图像质量。Liang等[45]针对图像信噪比低的问题提出了一种实时增强算法,首先使用滤波器处理图像得到模糊图;再对原始图像和模糊图做差得到细节层;最后增强细节层,并与模糊图叠加,从而达到增强红外图像中细节的目的。
此外,近期深度学习方法也应用到红外气体的预处理操作中。针对高光谱图像中的冗余信息, Su等[46]开发出了基于无监督解混的深度自动编码器网络,采用堆叠式自动编码器学习光谱特征、变分的自动编码器用于盲源分离,能够排除异常和低信噪比数据。对于获取的图像中模糊或受遮挡的部分,Qiao等[47]提出了一个基于U-net的生成对抗网络,用于恢复受损图像;同时使用另一个经过预训练的基于VGG16的U-net网络辅助提取特征损失。
对单一均匀背景的气体泄漏图像,经过简单处理后即可获得目标气体区域。但真实场景中通常不会出现此类理想状况,其他后续处理是十分必要的。在此过程中,噪点会对检测产生干扰,丰富的气云特征能够有效提高检测准确率。因而预处理阶段主要的目的是增强细节和减少噪声,方便后续处理。
4.2 前景提取
实际应用中气体泄漏的背景十分复杂,仅经过预处理的图像无法使用简单的形态学操作直接获得气体区域,需要对背景和前景进行分割。
李珊红等[48]针对泄漏点温度变化在图像中产生的灰度值细微变化,提出了一种帧差方差法。该方法以差分图像为基础,使用方差法增大泄漏点的灰度变化,实现了对金属容器泄漏点的定位。受限于帧差的原理,该方法仅适用于视野和目标容器静止的场景。
Ohel等[49]将背景数据立方和输入数据立方分别转换成向量,使用光谱角制图值(spectral angle mapper,SAM)衡量二者相关度后,对异常向量进行K均值分类,接下来进行形态学操作排除不符合标准的对象,最终确定是否存在气体泄漏。文献[45,50-51]使用高斯混合建模分割前景,并以一些气体特征进行筛选,得到了较为准确的气体图像。上述方法主要思想是将低维光谱数据映射到高维空间,利用前景与背景不同的位置关系进行分离。但文献[50]存在一些不足:后续形态学操作仅有开滤波,无法将气云同鸟、飞机等干扰区分开;此外,对于单一气体的检测而言,使用高光谱数据会占用额外的数据带宽,增加设备的使用成本。高斯混合模型需要每个模型有相当数量的点进行训练,当前景占比较小时算法易发散,效果差;背景复杂及光照发生变化时会产生较多误报。
对于背景比较规律的场景,除直接进行背景分割外,还可以对图像进行背景重建,再与原图做差得出残差图像,获得前景物体,该技术已被广泛用于缺陷检测[52]等领域的初步分割。宋晓瑞等[53]首先获取高光谱图像的背景光谱字典,重构得到预测背景,接下来用预测背景图像与原始图像计算得到残差图像,最终利用局部RX检测算法进行异常目标检测。该算法对不同场景下异常检测的运行时间高达91~112 s,无法用于实时监测,但其耗时主要来自原始算法LRX和求取字典及编码时的循环迭代。在应用中,间隔若干帧使用一次背景重建,再利用残差图像提取前景进行后续分析能够降低数据量,提高检测速度。
4.3 特征选择
在复杂环境中,提取出的前景除气体外还包含人物、车辆等干扰,会产生误报,接下来需要应用气云所具有的特征对干扰进行剔除。常用特征有运动特征、形状特征及纹理特征,下面分别对典型算法进行详细介绍。
4.3.1 运动特征
泄漏气体与常见干扰相异的运动特征主要表现为其扩散性。从动态的角度,红外图像中的气云具有随时间扩大的趋势,而行人等干扰物的面积多为固定;从静态的角度,气体的泄漏状态达到稳定后,气体浓度在泄漏点处最高,并随着扩散而降低,因而泄漏气体在红外图像中呈现出的“亮度降低”由中心到边缘逐渐减弱。
洪少壮等[50]在前景分割后的区域增长操作中不断加大阈值,使得气云依次呈现出由大到小的连通域,与其他干扰物形成的面积基本不变的连通域不同,实现从连通域面积的角度描述气云的扩散特征并与干扰物区分。该算法在背景复杂时具有一定的局限性,适合用于无杂物的开阔场地泄漏监测。
4.3.2 形状特征
当高压气体和低压气体发生泄漏时,其在红外图像中的形状有很大区别:高压气体会呈现出锥形、而低压气体没有固定形状,仅呈现出边缘不规则性。
Wang等[54]提出了一种用于烟雾检测的锥形识别算法:提取疑似区域的长轴和短轴,当短轴将区域分成的上下两部分质心到整体质心的距离之比介于0.6和0.95之间时,认为区域为倒锥形。该算法可应用于高压气体泄漏中的锥形特征识别。
对图形的不规则性,人们通常使用圆形度进行量化。洪少壮等[50]认为行人和车辆等物体的圆形度与泄漏气体相近,无法做出准确区分,从而提出使用描述边缘弯曲程度的曲率熵对运动区域的不规则性进行度量,进而排除干扰。
4.3.3 纹理特征
同烟雾类似,红外图像中的泄漏气体也存在一些纹理特征。方向梯度直方图(histogram of oriented gradient,HOG)是通过计算局部图像梯度的方向信息的统计值来描述图像局部纹理特征的方法。洪少壮等[50]将HOG与支持向量机结合用于气体检测的纹理特征判别:将图片切为7×7个检测窗口,串联各块的梯度方向特征得到HOG特征,接下来送入支持向量机进行训练,最终有效降低算法的误报率。
翁静等[55]设计了一种利用尺度不变特征(scale-invariant feature transform,SIFT)区分气云与干扰物的热成像检测算法:先用帧间差分法获得运动目标后,使用VLFeat提取样本的SIFT特征,再使用K-means聚类算法构造特征表,根据特征在图像中出现的频率对气体与干扰进行分类。该方法测试过程贴近真实场地,精确率达86.00%,每帧图像的处理时间约3.6 s,可用于厂区监控,不适合用于手持设备或自动巡检。
实际应用中,背景和泄漏气体的复杂性限制了基于单一特征的算法的准确率,需要引入多特征级联的方式进行检测,并根据不同的使用场景手动设计不同的特征阈值;环境光照的变化也会影响算法稳定性。这些不足使得使用传统方法进行泄漏气体检测具有很大局限性。
4.4 基于深度学习的检测方法
基于深度学习的检测方法不需要手动提取特征,可直接、快速、高效地对输入图像或视频进行检测与定位[56]。
Wang等[57]提出了一种基于卷积神经网络(convolutional neural networks,CNN)的气体泄漏检测网络GasNet。在自制CH4气体泄漏数据集GasVid上总体准确率可达95%。两年后,该团队首次开发了用于气体泄漏视频检测的VideoGasNet[58],其以3D CNN为核心,二分类的准确率提高到接近100%;也可对视频中小、中、大型气体泄漏的三类自动分类,准确率可达78.2%。
上述研究致力于判定图像中是否存在泄漏气体,没有对气体进行定位,无法将检测结果用于寻找故障源头。Huang等[59]提出了基于YOLOv4的SF6气体泄漏检测算法,能够在1.5~5.5 m的距离上排除热干扰及动态水蒸气干扰,检测精度可达88%。该算法能够大致确定气体当前的扩散范围,有利于后续检修工作的开展。
对气体进行分割能够更加精准地获取泄漏气体的位置信息,锥形气云甚至有助于对泄漏点进行直接定位。 Marshall等[60]将U-net网络用于分割泄漏气体,其结构相比标准的全卷积网络(fully convolutional networks,FCN)更适合用于语义分割。受限于有限的数据量,网络有时会对天空产生误报以及出现分割区域不完整的情况。谷小婧等[61]针对气羽的各向异性特点,采用二维高斯模型下的概率函数作为嵌入空间的相似性度量,提出了一种通过聚拢像素点并学习一个斜椭圆形的带宽来分割气羽的深度网络。
在硬件支持且充分训练的情况下,深度学习方法具有更快的速度和更强的泛化能力,不需要手动设计特征,预处理操作也更加简单,具有良好的发展前景。但网络性能受训练数据影响很大,使用场景发生变化时输出结果不稳定,因而投入使用前需要使用充足的数据进行训练。另一方面,气体泄漏视频中包含十分丰富的时序信息,其中的气云运动信息可以作为检测的重要依据,但目前基于深度学习的方法多存在数据场景单一、帧间信息没有得到利用的问题,检测的精度难以保证。
4.5 评价指标
对于检测气体泄漏准确性的评价有如下几种:基于判断图像或视频中有无气体的二值化判断的准确率;由二值判断衍生出的检出率(true positive rate,TPR)、虚警率(false positive rate,FPR)、受试工作特征曲线(receiver operating characteristic curve,ROC)及曲线下面积(area under curve,AUC)用于描述检测的准确性;基于分割区域面积占比,描述分割准确程度的交叠率(intersection over union,IoU);用于评价算法速度与资源占用的检出时间(s)[60]和运行速度(帧/秒)[60-61]。上述主要评价指标的计算方法或绘制方法如表2所示。各文献使用的数据集不尽相同,因而无法直接比较其性能优劣;通常出现气体泄漏的时间远少于无泄漏状态,因而虚警率会比召回率更加受到关注;一般认为运行速度快于1帧/秒可基本实现实时检测。
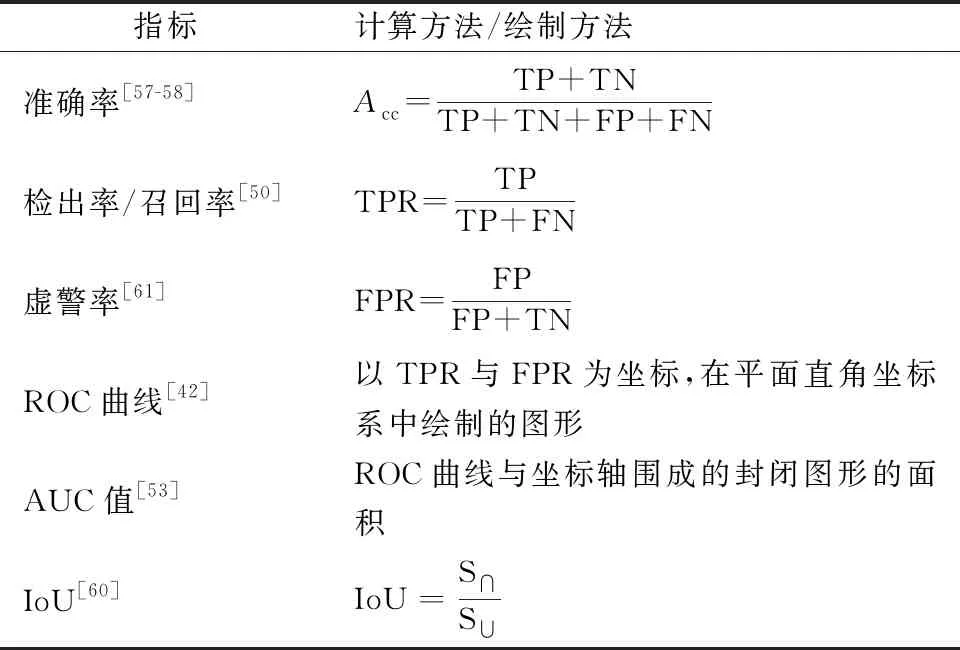
表2 泄漏气体检测算法的准确性评价指标
5 技术难点及发展趋势
现阶段用于气体泄漏检测的红外成像仪器较为成熟,但能够投入使用的检测算法还不完善,设备自动化程度低。现有的检测算法大多仅适用于特定场景,而实际应用中环境十分复杂,雨雪、雾霾、低温等条件会对检测产生干扰;气体的温度、压强等物理性质也会影响检测结果,具体的技术难点和发展趋势如下。
5.1 图像增强
受温度、背景、摄像机成像质量等因素影响,气体泄漏红外图像中的气云部分往往不够明显,直接进行检测比较困难。如何提高图像的清晰度、突出图像中的气云信息、提高检测算法的性能仍是亟待解决的问题。当前出于研究热门的图像增强网络如AWGAN[62]、RSGUNet[63]等能够对低质量彩色图像进行处理,在亮度、对比度、边缘锐化、噪声抑制等方面提高图像质量,但应用在红外光谱图像时存在如下的问题:色彩通道不匹配会导致无效节点过多、网络臃肿,降低运行效率;图像增强操作通常以凸显边缘、亮度均衡化等良好观感为目的,不仅与气云的渐变式的边缘不符,甚至有可能会弱化气云特征,以至于干扰气体检测过程。因此,根据气云特性设计对应的增强算法及网络、人工增强气云来制作用于训练网络的图像对等方法有望在红外图像预处理中发挥作用。
5.2 帧间微小运动信息获取
相对于传统算法,深度学习检测网络具有更好的鲁棒性和泛化性,能够充分利用设备性能。在手持式红外成像仪的使用中,人眼通常无法在静止的照片中找到泄漏气体的微小气羽,但能直接在运动的视频中观察到。这表明低压泄漏气体的运动信息相较于静态信息更加显著,适合用于泄漏检测,而现阶段相关研究多为单帧检测,因而通过引入循环神经网络(recurrent neural network,RNN)、时间卷积网络(temporal convolutional network,TCN)[64]、光流网络[65-66]等方法,在现有检测网络的基础上融入时序信息、动态信息作为检测辅助是未来重要的发展方向。
5.3 多源信息融合
在工厂等应用场景中,也存在一些有色气体的泄漏或因泄漏而形成的水汽、烟雾。得益于RGB相机的高分辨率和高刷新率,在可见光范围内对这些目标的检测更加方便、精确;此外,使用RGB相机可以对警报区域进行验证,可以排除干扰物、降低误报。将红外成像与可见光成像进行有效融合进行泄漏检测也是一个提高检测准确率的有效途径之一。但即使相距很近的红外摄像头和可见光摄像头,其拍摄的图像仍会有不同,配准时往往会产生位移,降低图像分辨率。如何保证融合图像的清晰度是红外-可见光融合方向研究重点之一[67]。在此研究中重点需要解决摄像头旋转、图像畸变等因素影响。此外因为多源信息往往存在异构性,研究红外信息与可见光信息等多源信息的有效融合方式,建立多源信息融合的深度学习统一框架是解决石油炼化企业、化工园区等危险气体监测的重要研究方向。