基于动态背景场沙尘覆盖度指数的Himawari-8沙尘判识及强度估算方法
2023-07-26李彬孙小龙蒋姗姗卢士庆李云鹏李静
李彬, 孙小龙*, 蒋姗姗, 卢士庆, 李云鹏, 李静
(1.内蒙古自治区生态与农业气象中心, 呼和浩特 010051; 2.高分辨率对地观测系统内蒙古数据与应用中心, 呼和浩特 010051;3.通辽市气象局, 通辽 028000; 4.满都拉气象站, 包头 014000)
沙尘作为吸收性气溶胶对太阳辐射有较强的吸收作用,加热大气改变大气稳定度及其与云微物理的相互作用从而减少云量抑制降水。同时,作为环境污染物,对人类健康有一定危害。而且对社会经济发展,生态文明以及水循环等一系列活动有着直接或间接的影响。沙尘天气一般在春季爆发,对中国北方大部地区的生产和生活有较大影响[1-2]。
地基观测资料的限制使得沙尘气溶胶的研究还有很大的不确定性,而且沙尘爆发一般具有较大的影响范围,一般发生在自然条件恶劣的地区,而这些地区地基观测站点少且分散,给监测、预报和研究沙尘暴带来很大困难。而卫星遥感监测范围广、波段多的优势可以弥补这些不足,因此,针对沙尘遥感监测人们开展了许多研究,发展了许多算法。
目前,科学家在利用卫星资料识别沙尘爆发方面主要通过多通道组合,主要是可见光、近红外通道及热红外通道。Ackerman[3]较早提出分裂窗插值识别沙尘,利用红外亮温(brightness temperature,BT)监测沙尘,为以后的沙尘定量识别提供了思路。Xu等[4]利用中分辨率成像光谱仪(moderate-resolution imaging spectroradiometer,MODIS)第3和第7波段构建归一化差值沙尘指数 (normalized difference dust index,NDDI)来判识沙尘。詹奕哲等[5]结合成熟的红外分裂窗差值监测沙尘及卫星导风技术。Romano等[6]利用基于可见光和红外波段的多通道方法对二代气象卫星MSG(meteosat second generation)所搭载的旋转增强型可见光及红外线成像辐射计(spinning enhanced visible and infra-red imager,SEVIRI)的数据进行了沙尘识别。罗敬宁等[7]对多通道沙尘光谱特征进行分析,利用风云三号卫星的近红外1.6 μm、中红外3.7 μm以及热红外分裂窗进行了一次全球沙尘的实例监测。Di等[8]提出一种包含可见光、中红外、热红外波段的增强粉尘指数(enhanced dust index,EDI)来进行INSAT-3A/D卫星的沙尘监测。
研究表明红外分裂窗在沙尘识别上具有较大优势,特别是在高反射地表和夜间,因此红外亮温差(brightness temperature difference,BTD)也经常被用于沙尘的监测。延昊等[9]利用热红外亮温差(T11 μm~T12 μm)针对NOAA/AVHRR资料进行沙尘监测。Zhang等[10]利用BTD进行了MODIS数据的沙尘监测,并利用辐射传输模式建立了不同光学厚度、BTD、BT11 μm与有效粒子半径的查找表。Chaboureau等[11]利用BTD对沙尘和卷云的区域气象预测模型进行了评估。Schepanski等[12]采用8.7、10.8 、12 μm三通道亮温差对撒哈拉沙漠地区的沙尘源区进行了分析。Huang等[13]也利用雷达资料提出了微波极化亮温差 (microwave polarization temperature difference,MPTD) 微波极化指数 (microwave polarization index,MPI)来识别云下沙尘,取得了一定效果。Kluser等[14]结合BTD与时间序列方法进行沙尘监测,Sang等[15]在BTD的基础上引入了亮温比(temperature difference ratio,BTR)来消除地表温度变化造成的影响。也有研究利用地物比辐射率特征(比辐射率是指物体的辐射出射度与同温度下黑体辐射出射度的比值),结合热辐射波段特征,讨论了沙尘暴发时比辐射率在热红外波段处的变化来识别沙尘[16]。比辐射率在云和沙尘混合的区域识别效果较差,因为水汽云在11 μm的散射能力强于12 μm,而吸收能力弱于12 μm,表现出与沙尘相似的比辐射率特征,特别是弱沙尘区域[5]。Yang等[17]利用NPP/VIIRS的3.7、11、12 μm的BTD组合进行沙尘判识。
可见光波段难与沙漠戈壁等亮地表区分;热红外波段对强沙尘的判识效果较好,但对于弱沙尘则效果较差;微波传感器目前多搭载于极轨卫星,数据存在时间和空间分辨率都较低的局限,无法对沙尘发生发展进行实时有效的监测预警。因此如何利用高时空分辨率数据进行更加有效的沙尘识别是当前主要的研究方向。
Himawari-8是世界上第一颗可拍摄真彩色图像的静止气象卫星,观测频率提高到每10 min一次,对沙尘天气过程及动向的持续观测性能也显著提升,从真彩色图像上还能解译其他图像中与云层混杂的沙尘、弱浮尘。因此,研究者针对Himawari-8沙尘监测也开展了许多研究,而利用亮温差BTD是目前应用最广泛的监测方法。She等[18]利用Himawari-8的3.9、8.6、11、12 μm的BTD组合进行沙尘判识,并针对亮、暗地表进行了阈值区分。邱昀等[19]利用Himawari-8热红外BTD判识沙尘并结合地面气象数据及激光雷达进行了三维动态观测。李彬等[20]结合热红外BTD及可见光灰度熵方法对Himawari-8纯沙尘及混合性沙尘进行了判识。刘方伟等[21]通过对典型地物及沙尘光谱特性和多波段亮温差分析,提出组合阈值进行沙尘监测。以上方法阈值的确定多以强度较大的沙尘暴进行经验统计得到,且在不同场景(如昼夜)下的不确定性较大。Himawari-8的11 μm与12 μm的BTD随时空变化有明显差异,单一阈值容易产生漏判。张海香等[22]基于Himawari-8的11 μm和12 μm的BTD背景场,提出基于动态阈值的沙尘判识方法。Legrand等[23]也曾利用红外亮温粉尘差异指数(infrared dust difference index,IDDI)来识别沙尘。但是此方法本身也存在着一些不足,对强度大持续时间长的沙尘效果较差,动态参考阈值的确定也是制约因素。
一次持续时间长,影响范围大的沙尘过程一般都伴随着不同强度的沙尘,而局地沙尘过程通常强度较弱,而沙尘起始阶段的弱沙尘对沙源识别具有重要意义;特别是在干旱半干旱地表判识较为困难,且云沙混合区及沙漠戈壁易发生误判[24-25]。因此,现使用Himawari-8卫星数据提出一种新的基于动态亮温差背景场的沙尘覆盖度指数对不同地表条件及强度下的沙尘进行判识,并据此进行了沙尘强度估算。
1 数据介绍
Himawari-8是日本气象厅的第二代静止气象卫星,有16个通道,分布于可见光-近红外-热红外,搭载高级成像仪(advanced himawari imager,AHI)能扫描区域包括:Full Disk(全球范围)、Japan Area(两个日本地区的范围)、特定区域(两个范围)、地标性区域(两个范围)。用于拍摄全球范围和日本地区的扫描范围是固定的,其他的两个特定区域和地标性区域是可以灵活调整的,不论是哪种拍摄模式,时间分辨率最少都能达到10 min,分辨率0.5~2 km。
本文中使用了2017—2019年春夏季发生于中国内蒙古及其周边地区的几次典型的沙尘天气过程,所用数据的日期和时次如表1所示,结合目视解译与地面观测对方法进行了分析验证。研究中所使用影像范围为北纬41°~54°、东经97°~127°和北纬41°~54°、东经110°~127°。为了分析方法对强度较弱沙尘过程的监测效果,选取了三处典型干旱半干旱区域弱沙尘天气事件,即2019年4月15日、2019年3月27日、2019年4月20日,分布标记为S1、S2和S3。2017年5月3日的沙尘过程波及的范围较大,有不同强度分布,因此利用这一天的数据对本文算法在大范围进行了分析和验证。地面观测数据来自全国综合气象信息共享平台和地方气象台站观测的天气现象。分析过程中,还使用了2020年全球30 m地表覆盖精细分类产品V1.0,MODIS的植被指数NVDI产品(MYD13A3)、MODIS的气溶胶光学厚度产品(MCD19A2)及SRTM的DEM数据,分辨率均统一为1 km。

表1 实验所用Himawari-8卫星影像列表Table 1 List of dates of Himawari-8/AHI date used for training
2 判识方法
2.1 云、水体、冰雪检测
由于云、水体、冰雪会对判识所需底图及待判识图像归一化等处理产生影响,因此首先需要对数据中的上述目标物进行掩膜处理。具体方法如参考了葛邦宇等[26]针对Himawari-8的算法。
2.2 热红外亮温差底图
对于长波红外辐射而言,它们在空中组成类似云的物质表面,足以改变长波发射辐射的分布。在波长11 μm和12 μm的热红外波段,水汽的吸收存在较大差异。沙尘气溶胶折射率虚部的差异会影响沙尘的大气辐射,导致亮温差ΔT<0[9]。近红外和中红外波段,对于强沙尘的识别效果较好,对于弱浮尘,受到地表反射辐射影响较大,识别效果较差。热红外分裂窗利用两个通道的差异来识别,这种对强弱沙尘都存在。BTD方法还可以有效剔除大范围连续云区。因此,本文中使用BTD值构建亮温差背景场底图,其表达式为
BTD=T11 μm-T12 μm
(1)
Himawari-8作为一颗静止气象卫星具有全天时观测能力,而地表温度具有日变化特征,因此不同于极轨卫星数据,静止卫星观测亮温和亮温差也具有一定日变化特征。本文中利用2019年4月2日08:00—17:00的晴空数据生成了各时次的亮温差产品,并依据中国科学院空天信息创新研究院发布的2020年全球30 m地表覆盖精细分类产品提取了城市、农田、林地和沙地(包含沙漠和戈壁)四种典型地物在各时次的亮温差值(10个代表性像元的平均值)得到其日变化规律,如图1所示。

图1 不同地物BTD值日变化Fig.1 Diurnal variation of BTD for different land covers
可以看出,四种地物类型均表现出先升后降的特征,一般都在中午前后到达最大值,在晨昏时间为最小值。植被覆盖较高的林地的日波段最小,植被稀疏的沙地日波段最为剧烈,日较差近3 K。 为了研究BTD在不同季节之间的变化,我们选取了能表征地表状态变化的植被覆盖度指数(fractional vegetation cover,FVC)来进行分析比较。从图2可以看到BTD的分布与植被覆盖度之间没有特别明显的规律性,其中还可能受到海拔和纬度的影响,但是在植被覆盖度低的区域,BTD的高值也有较为集中的分布,而在植被覆盖度高的区域也有BTD低值的集中分布。
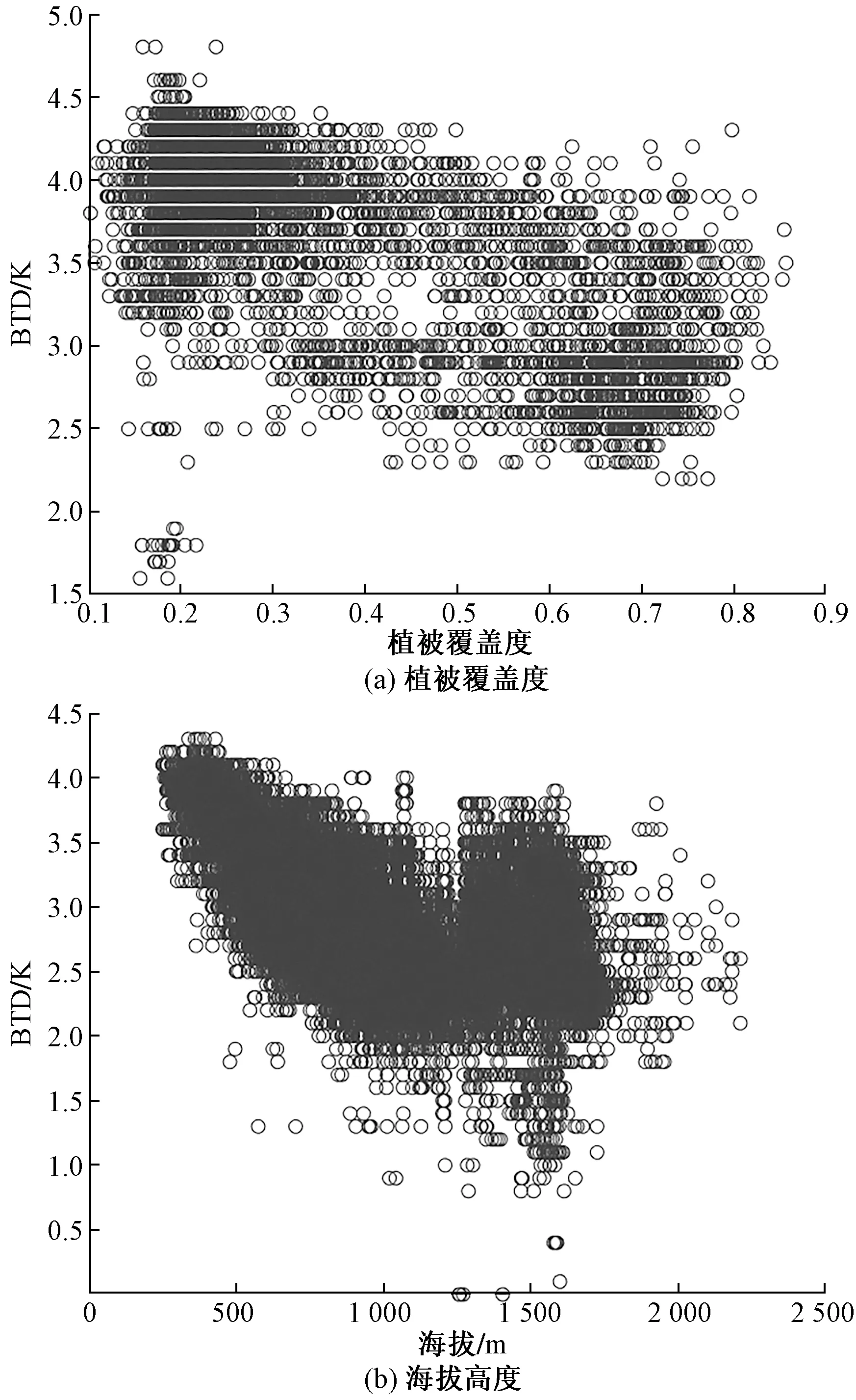
图2 植被覆盖度和海拔高度与BTD值分布散点图Fig.2 Scatter plot of BTD with fractional vegetation cover and altitude
She等[18]在研究中发现当海拔低于3 000 m时,BTD值通常大于2.5 K。本文中选取了研究区内海拔2 500 m以下的样本进行统计,结果基本一致;在1~2.5 K也有分布,总体随着海拔升高BTD值呈现下降趋势,受植被状态、纬度等影响在高海拔 区也有BTD高值的分布。基于以上分析,BTD值分布在不同区域、不同时段具有较大的不确定性,因此背景场的构建需基于动态。
构建背景场。基于上述对于BTD在不同时间,不同植被覆盖度及海拔等分布规律的讨论,需要针对判识区构建动态背景场。构建晴空亮温差背景场是整个沙尘监测的重要一步,背景场的纯净程度将决定沙尘判识的准确性,特别是对一些强度较弱的沙尘。
首先对云、水体、冰雪等进行掩膜处理。掩膜处理后选择同一时刻的多天数据,保证判识区域内的每一个像元为晴空背景,并把多天的数据合成为一个最小值矩阵,设为背景场矩阵。表达式为
(2)
式(2)中:n为构建动态背景场的参考数据的个数,本文算法选取待判识日期前7~10 d的数据,保证期间植被状态改变不大,其中有沙尘天气的要剔除;i、j为像元的行列号;ΔT为亮温差值。如图3所示为2019年4月下午16:00的亮温差背景场合成图。可以看出在不同地区表现出较大差异,在高海拔的林区BTD值较低,在低海拔的城市区和沙漠戈壁等地区BTD则相对较高。
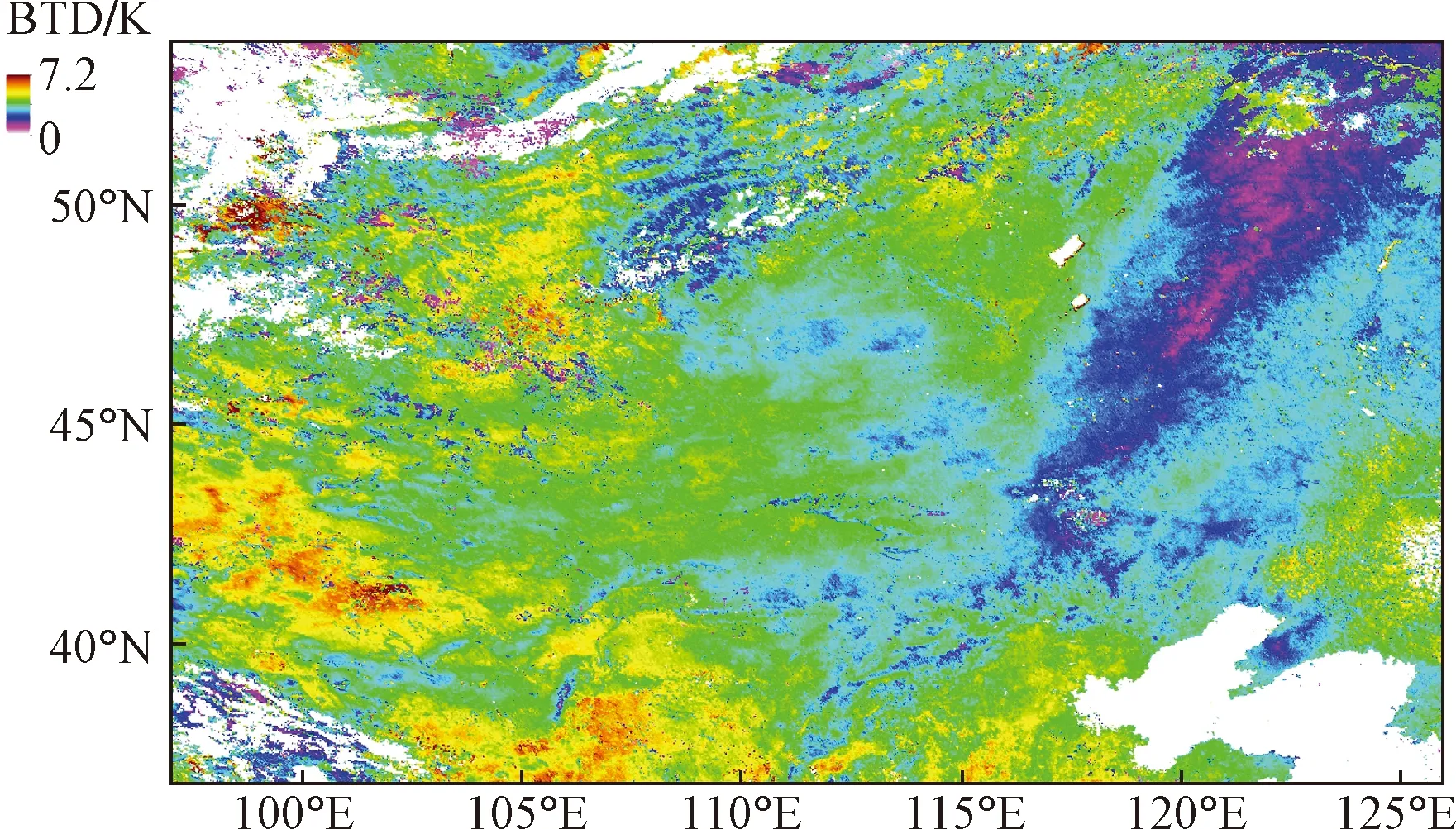
图3 2019年4月16:00亮温差背景图Fig.3 Background of BTD at 16:00 on April,2019
2.3 沙尘覆盖度指数(FDCI)
目前大部分沙尘监测都是基于亮温、亮温差等阈值进行的,而由于卫星观测的这些参量在不同时间、地表状态、海拔等具有较大差异,因此使用固定阈值存在局限,使用动态阈值也具有较大波动性。因此提出一种基于动态背景场的沙尘覆盖度指数来进行沙尘判识,该方法既能通过构造动态背景弥补亮温等变化产生的固定阈值局限,也能通过指数化的方法将判断阈值进行固定化,避免动态阈值选取的不确定性。
基于11 μm和12 μm的热红外波段亮温差建立动态背景场,并对该背景场进行归一化。由于BTD的值域差别较大,且存在负值,归一化之后可以把数值统一为0~1,这样便于进行指数化的计算。归一化公式为
(3)
φnorm0=1-φnorm
(4)
式中:φ和φnorm别为归一化前后的变量值;φmax、φmin和φmean分别为变量BTD的最大值、最小值和平均值。由于BTD负值越小的沙尘强度越大,为了让归一化值与之对应,用1减去φnorm得到最后的φnorm0值[27]。图4所示为一次沙尘过程中BTD<0的像元分布情况和其归一化φnorm0的分布情况,归一化后二者呈现出镜像分布。
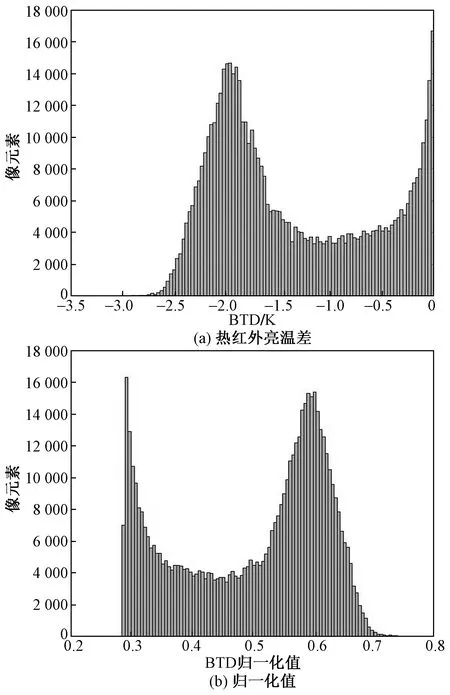
图4 一次沙尘过程热红外亮温差及其归一化值分布Fig.4 Distribution for BTD of heavy dust and its normalized value
在遥感生态评估业务经常使用植被覆盖度FVC来表征植被的生长状态,Wang等[28]也提出积雪覆盖指数(fractional snow cover,FSC)来进行积雪的判识。沙尘覆盖度指数也是基于以上思想,利用该指数来反映像元沙尘覆盖的程度,并据此判断是否为沙尘。 将待判识数据的BTD与背景场的BTD分别进行归一化后,再计算沙尘覆盖度(fractional dust cover index,FDCI)指数值,公式为
(5)
式(5)中:φnorm0,det为待判识像元的归一化值;φnorm0,back为像元背景场归一化值;φnorm0,max为沙尘归一化值统计分布中的最大值,这里取0.75。
经过实验统计发现,将该阈值设定为大于0.2能够覆盖绝大部分沙尘区。图5、图6所示为从2017年5月3日、2019年3月27日、4月15日、4月20日、3月26日和2018年4月29日的六次沙尘过程中结合地面观测选取不同强度的沙尘像元FDCI值的分布情况。其中有6.8%的值小于0.2,59.3%在0.2~0.6之间,33.9%大于0.6。不同强度沙尘FDCI和BTD的分布情况表明,强度较弱沙尘的亮温差值有约90%大于0,而FDCI值则绝大部分大于0.2。
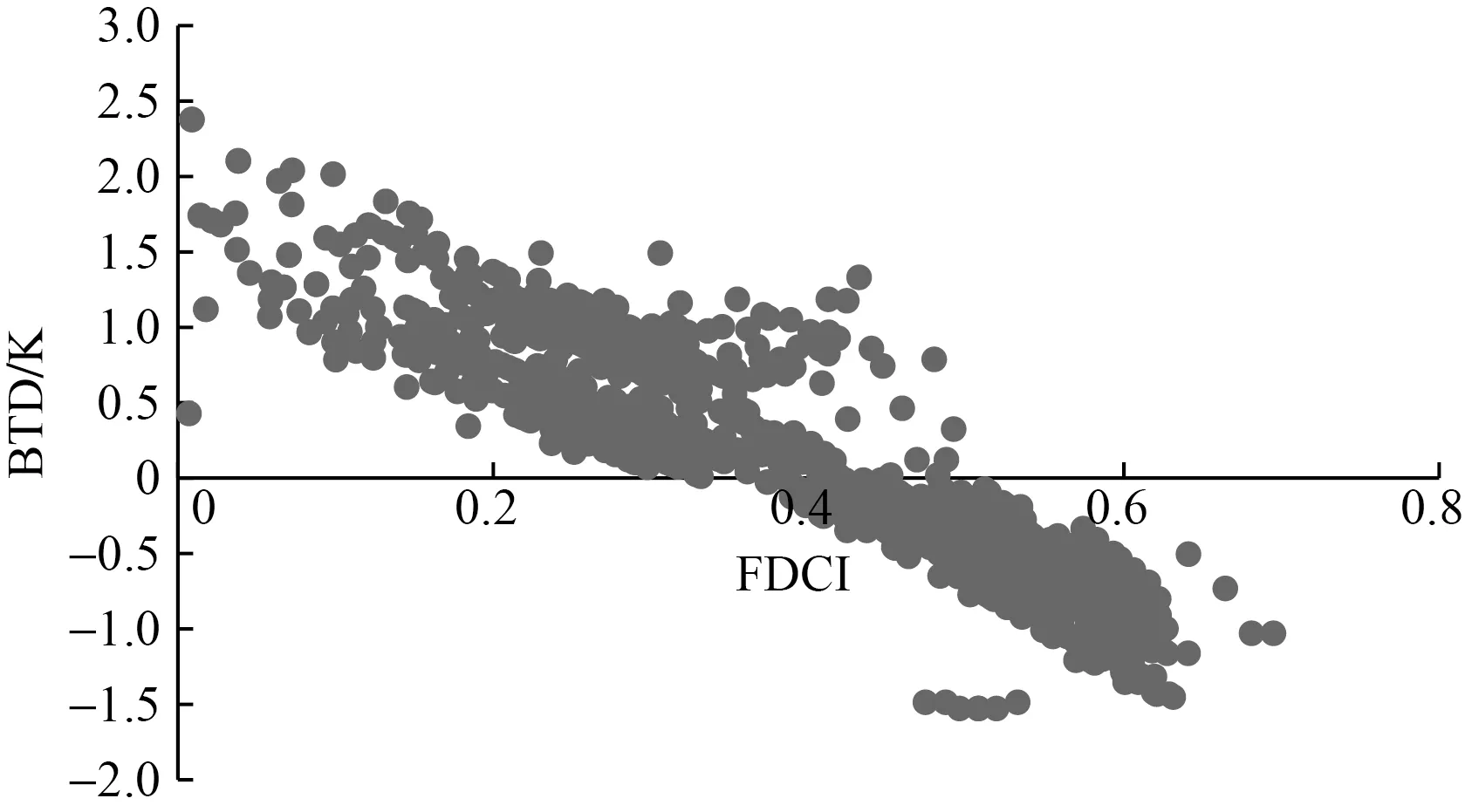
图5 7 166个弱及中等强度沙尘像元FDCI和BTD分布Fig.5 Distribution of FDCI and BTD of 7 166 thin and moderate dust pixels
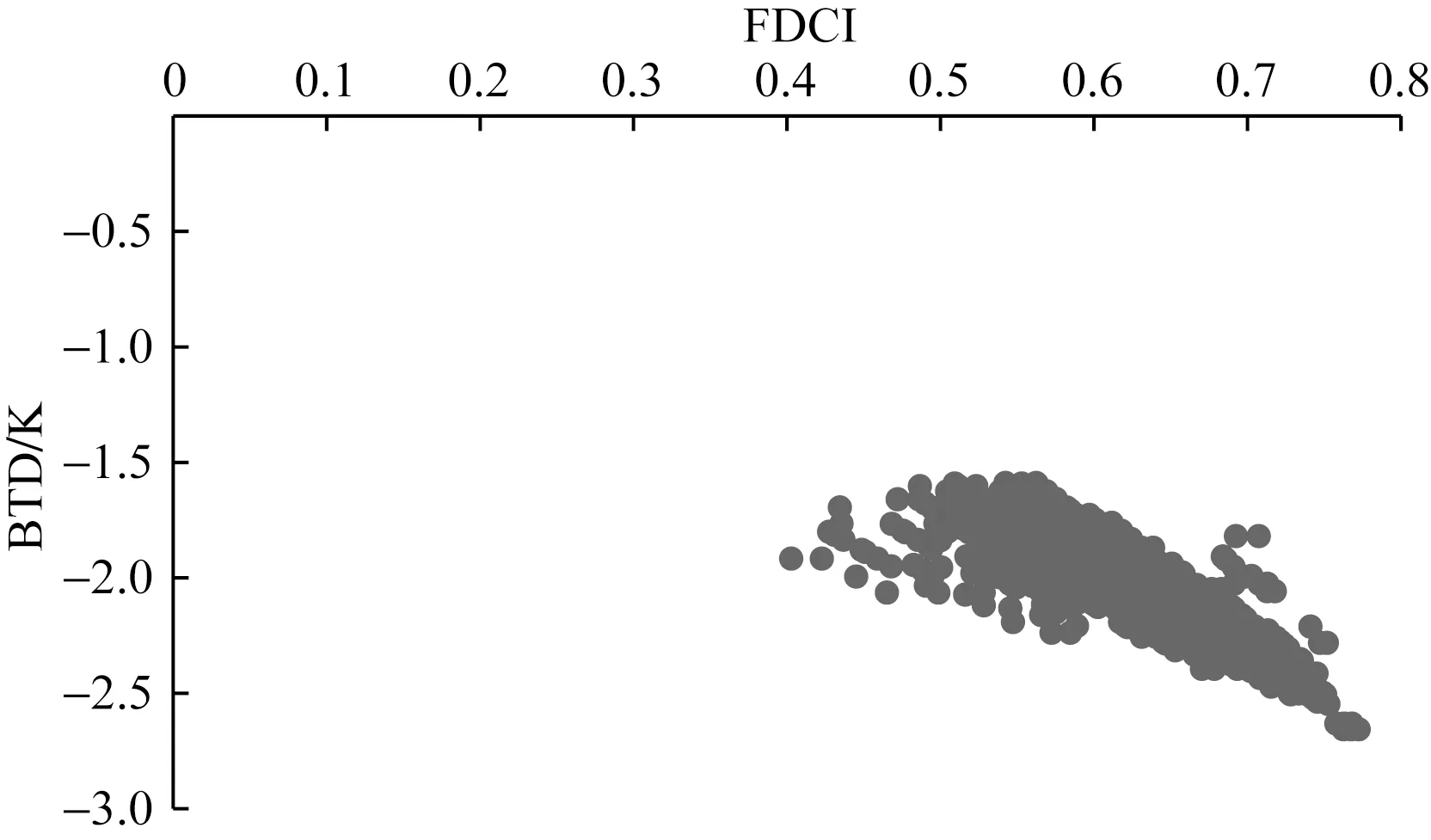
图6 9 980个强沙尘像元的FDCI值和BTD值分布Fig.6 Distribution of FDCI and BTD of 9 980 heavy dust pixels
为了分析FDCI对不同强度沙尘的区分效果,分别选取了100个弱沙尘和300个强沙尘(主要是目视解译的纯像元)像元的FDCI进行统计,得到如图7所示的箱线图。可以看出强沙尘的FDCI区间为0.4~0.8,集中分布于0.55~0.65,算法对此类沙尘的区分作用明显。弱沙尘的FDCI区间为0.1~0.4,集中分布于0.2~0.3,与强沙尘的FDCI分布具有一定连续性。因此FDCI指数对于不同强度沙尘区分效果明显,特别是对弱沙尘。
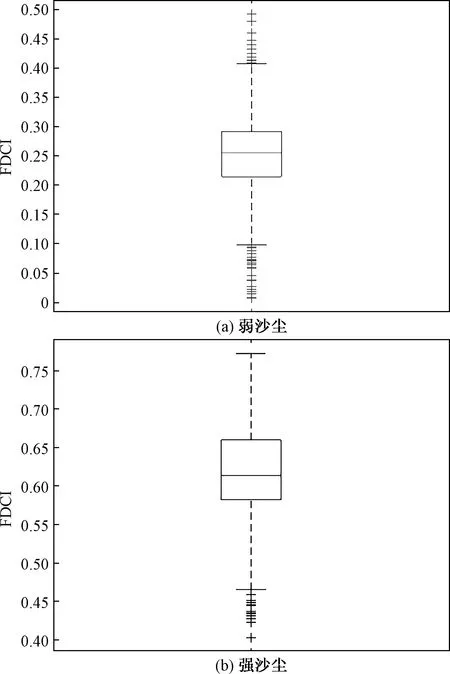
图7 弱沙尘与强沙尘的FDCI分布箱线图Fig.7 Boxplot of FDCI for thin dust and heavy dust
2.4 孤立区的剔除与填充
由于沙尘天气过程通常都会呈现出连续分布特征,极少出现孤立分布,因此这些零散孤立区域很大可能是误判,应予滤除。如图8所示,要进一步滤除这些误判的孤立像元,只需将不连续的细碎区域滤除,保留具有连续特征的沙尘区即可。
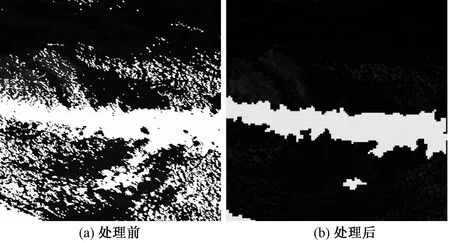
图8 灰度熵处理结果Fig.8 The results before and after using entropy of brightness
本文中采用基于图像灰度熵的团块目标检测方法。该方法假设n×n的窗口内像素灰度分别为a1,a2,…,an,则该窗口内的灰度熵H定义为
(6)
(7)
灰度熵(0≤H≤1)反映了窗口内像素灰度的差异程度,值越大表明窗口内能量的空间分布越均一,当窗口内所有像素灰度值相同时,图像灰度熵为1;反之,表明灰度差异大。
首先将经过RDI(reflectivity difference index)判识之后的结果转化为二值图像,并设定3×3像元的窗口进行灰度熵检测[20]。这样窗口内的灰度熵值就只有0和 1两个值,将值为0的窗口判断为非沙尘区,反之为沙尘。
另外,在一片连续的沙尘区中也会有受到云干扰而被漏判的像元,对于这类像元应该进行补充判识。本文中对待填充区域(云覆盖区)首先进行边缘提取,然后逐一判断区域边缘像元是否为已判识沙尘像元,如果全部为沙尘像元则说明该区域为连续沙尘区中的漏判部分并予以填充。
2.5 基于FDCI的沙尘强度指数(EDII)
沙尘强度作为沙尘气象监测的重要指标也是遥感定量反演的主要对象,一般是在沙尘判识结果的基础上进行参数估算。不同研究者从需求角度出发,有不同的强度等级划分标准。2006年国家标准《沙尘暴天气等级》(GB/T 20480—2006),规定了沙尘天气过程等级,将沙尘天气强度等级划分为5个等级:浮尘、扬沙、沙尘暴、强沙尘暴、特强沙尘暴。 遥感反演沙尘强度主要依据反射率、亮温和光学厚度几个指标,罗敬宁等[29]利用1.6 μm波段构建了可比沙尘强度指数,随后又利用11 μm和12 μm亮温差和1.6 μm波段反射率建立了FY-3的沙尘强度指数。Di等[8]利用INSAT卫星数据提出一种增强型沙尘指数(enhanced dust intensity index,EDII),该指数综合了归一化的反射率、亮温及光学厚度。公式为
(8)
式(8)中:A=1,B=10,C=0.1;R1.6表示1.6 μm波段反射率,R0.47表示0.47 μm波段反射率。AOD由延昊等[9]利用SBDART辐射传输模式模拟的沙尘BTD(11~12 μm)与0.55 μm光学厚度之间的关系计算得到。公式为
(9)
但是上述方法计算沙尘强度主要适用于强度较大的沙尘天气,而弱沙尘通常对于地表有一定透明度,地表信息对沙尘的光谱信息存在干扰,导致算法对于强度弱的沙尘适用性较差,计算强度一般偏大。
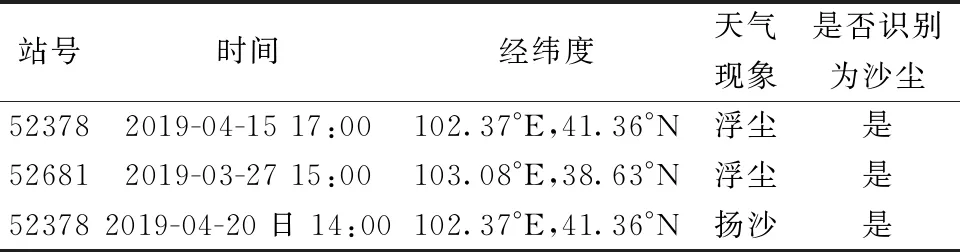
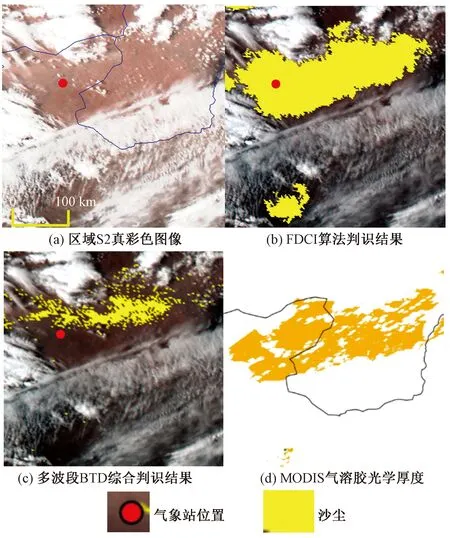
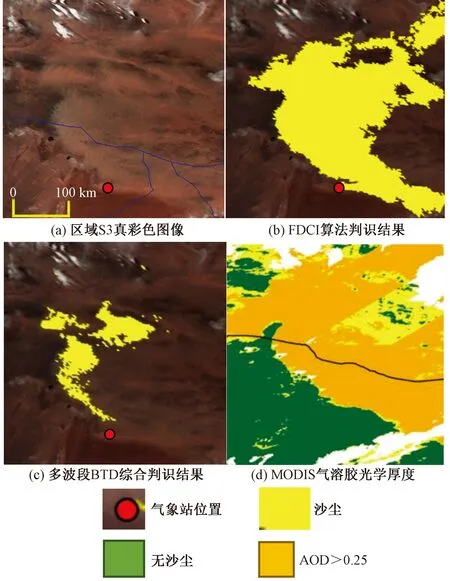
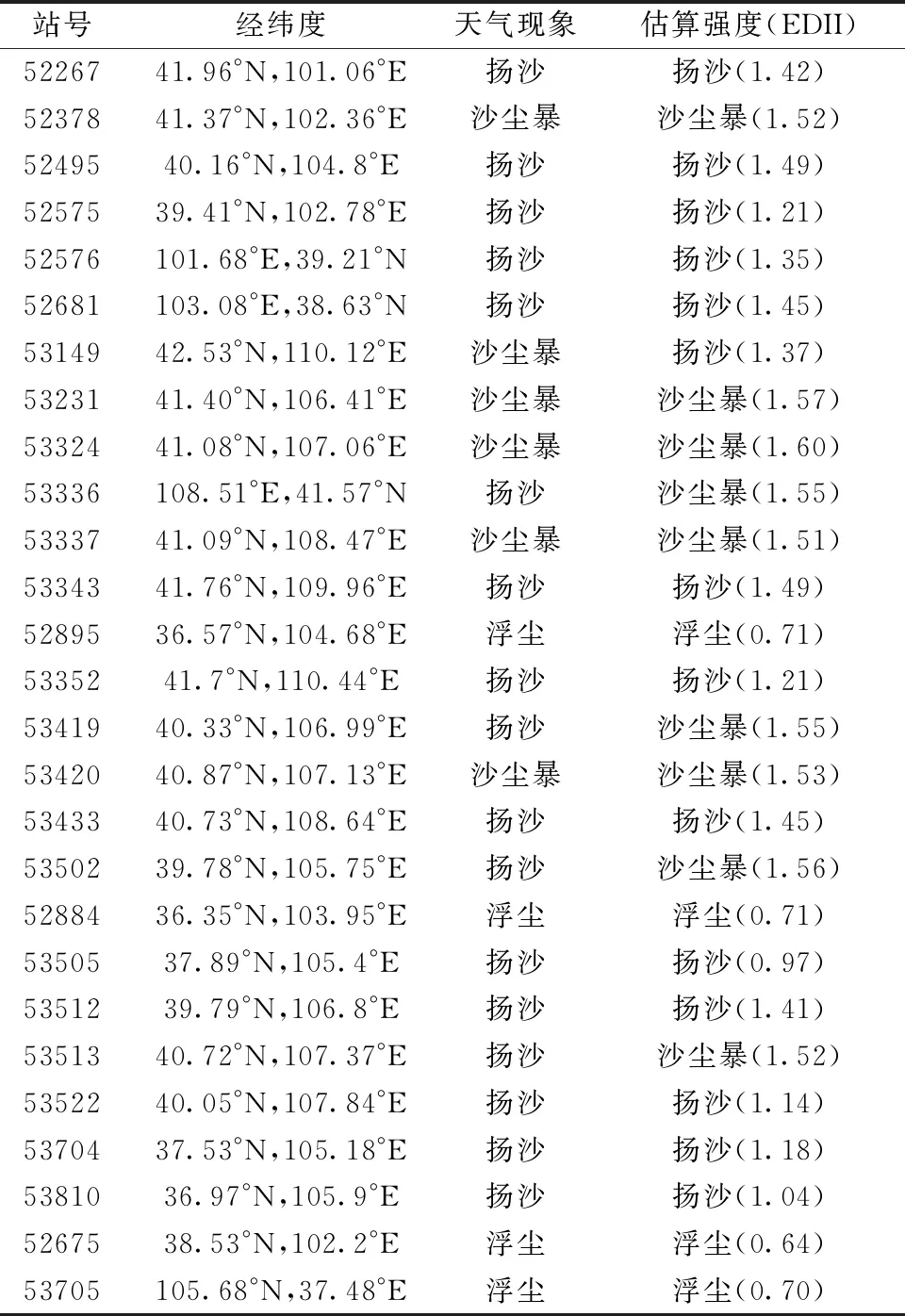
因此对于强度较大的沙尘使用式(8)进行计算,对于强度较弱的沙尘(0.2 EDII=1.67e-0.25VIS+0.47 (10) 式(10)中:VIS为能见度,km。能见度计算根据余娟等[30]高斯曲线优化的能见度与气溶胶光学厚度转换模型。公式为 (11) 式(11)中:τα为气溶胶光学厚度;M为月份参数,当观测月份大于6时,M取值为月份减6,反之加6。a、b、c为模型经验系数。 本节主要对前文所述实验数据和区域,首先针对弱沙尘利用FDCI进行识别,同时也在相同区域使用多波段分裂窗亮温差[18]方法进行判识,并将结果进行比较分析。图9~图11分别为区域S1~S3对应的真彩色影像、FDCI算法判识结果、多波段BTD所得结果。最后在大范围区域内进行判识及沙尘强度估算,并与观测数据进行对比验证。 图9 区域S1真彩色图像与两种方法的判识结果Fig.9 True color image of area S1 and detective results by two methods 区域S1为一个典型的弱沙尘与强沙尘都存在的过程,从图9(a)的真彩色图像可以明显看出上方的沙尘强度较弱,能一定程度得辨识出地表,这样强度的沙尘结合沙漠地表使得判识难度大大增加,导致BTD方法不能对此类情况进行有效识别。如图9(c)所示,BTD所得结果没有判识出该区域的沙尘。如图9(b)所示,FDCI方法则准确地识别出了区域内这段强度较弱的沙尘,且两者对下方强度较大沙尘的判识结果基本一致。表2中包含了气象站的经纬度和当时次所观测的天气现象,可以看出观测与判识结果一致。 表2 不同时间地面气象观测与算法识别结果Table 2 Observation on the ground and detective results by FDCI of various time points 由图10(a)的真彩色图像可以看到区域S2为一个典型的沙尘与积云混合状态,碎积云分布细碎而分散,一般由对流生成。沙尘区的下部及边缘处的沙尘较薄,因此BTD综合判识方法未能对此类情况进行有效识别,如图10(c)所示。FDCI方法则有效地识别出了区域内这些强度较弱的沙尘,图10(b)所示。 图10 区域S2真彩色图像与两种方法的判识结果Fig.10 True color image of area S2 and detective results of two methods 从表2中观测的天气现象与判识结果一致。为了在面上进一步验证算法的准确性,还使用了MODIS的气溶胶产品进行比对。如图10(d)所示,通过添加的地理边界线可以看出判识结果与气溶胶光学厚度AOD大于0.25的区域(橙色)基本一致,MODIS的气溶胶产品将沙尘区内的积云进行了最大程度的滤除,因此出现了一些孤立区,本文算的予以了填充。 根据阿拉善盟气象台2019年4月20日发布的气象信息,4月20日8时49分至13时57分阿拉善盟额济纳旗拐子湖地区出现扬沙天气,区域S3即为这次局地性沙尘过程。 由图11(a)可以看到沙尘区西部的厚度较大,其他部分则多呈现絮状分布,加之沙漠地表的干扰导致多波段BTD几乎不能识别,如图11(b)所示。而本文方法识别出的区域与MODIS产品AOD值大于0.25[图11(d)中的橙色区域AOD>0.25,黄色区域AOD>0.12],绿色区域为无沙尘AOD<0.12)有较高一致性,红圈即为拐子湖站所在位置。 图11 区域S3真彩色图像与两种方法的判识结果Fig.11 True color image of area S3 and detective results of two methods 通过对三个典型的沙尘过程的判识结果的分析可以发现,相比传统方法在弱沙尘识别上的局限性,本文算法在各种不同强度条件下的沙尘判识中取得了较理想的效果,提升了沙尘遥感判识的准确性和适用性。 为了进一步论证判识及强度算法的适用性,选取了2017年5月3日16时30分的一幅影像进行综合判识,并用进行沙尘强度估算。2017年5月3日发生了一次持续时间长、波及范围广的强沙尘过程,主要是由一个较强的冷涡和蒙古气旋共同影响所导致的,影响了中国内蒙古及北方大部分地区。如图12所示为真彩色图像和本文算法及沙尘强度的估算结果。表3列出了2017年5月3日17时的27个地面气象站观测的天气现象与本文算法识别的结果,这27个站均识别有沙尘,有浮尘、扬沙、沙尘暴三种不同强度类型的观测。本文根据能见度标准划分的沙尘强度等级与EDII值进行对应,给出EDII值对不同类型沙尘的强度等级划分:浮尘:0.4≤EDII≤0.8;扬沙:0.8 图12 2017年5月3日16时30分影像与本文方法沙尘识别结果及沙尘强度估算结果 Fig.12 The images of 16:30 on May 3, 2017 and detective results and intensity by the method in this paper 表3 2019年5月3日17时站点观测与算法识别结果Table 3 The results by observation and method of 17:00 on May 3, 2019 可以看出22个站的地面观测与判识及估算结果一致,有5个站沙尘强度的估算结果与地面观测有偏差。其中53 149观测为沙尘暴,估算为扬沙;53 336、53 419、53 502、53 513观测为扬沙,估算为沙尘暴。从这5个站的结果可以看出,误差中高估是主要的,原因可能是沙尘过程往往存在含沙量垂直分布不均的情况,在高空输送较强时上层含沙量较高,地面含沙量相对较低,造成地面观测较卫星估算结果偏低。通过与地面观测结果比较可以发现,本文算法明显优于传统BTD算法,特别是对弱沙尘,伴随着积云的沙尘,云系边缘沙尘等情况。对于这些复杂条件下的沙尘,传统方法都表现出了一定的局限性,而本文方法则能够进行有效识别和较高精度的强度估算。 由于卫星观测参量在不同时间、地表状态、海拔等具有较大差异,因此使用固定阈值存在局限,使用动态阈值也具有较大波动性。采用Himawari-8卫星数据,提出一种针对性的识别方法,基于动态亮温差底图引入了沙尘覆盖度指数FDCI。该方法既能通过构造动态背景弥补亮温等变化产生的固定阈值局限,也能通过指数化的方法将判断阈值进行固定化,避免动态阈值选取的不确定性。 结果表明该指数在一个较确定范围内对不同强度沙尘都可以进行有效判识,并能提升对弱沙尘的识别效果。在此基础上本文还构建了沙尘强度指数EDII模型,其中对2017年5月3日沙尘强度的地面验证表明,位于观测区的27个站中有22个站的地面观测沙尘强度与估算结果一致,具备业务应用价值。适用于各种地表及强度条件下的沙尘监测,该方法是对分裂窗亮温差法的有效改进。将为中国新一代静止气象卫星FY-4B(已发射,在轨测试中)的沙尘遥感业务提供更多有益参考。由于国产卫星在通道设置、辐射定标等方面存在一定差异,因此国产卫星的适用性研究仍需做针对性研究。 但是,对于一些极弱的地面性浮尘天气,卫星监测条件下的FDCI对其敏感性低,仍有较大的判识难度;另一方面,在大范围复杂云系影响下判识的准确性也会受到影响。大范围沙尘过程有时会有一些云系与沙尘混合的情况,使整体亮温值降低、亮温差值变大,对沙尘判识结果造成一定影响,特别是一些薄云下的沙尘,容易被当云掩膜处理掉。此外,由于强沙尘过程常涉及夜间判识,而本文基于FDCI构建了EDII的沙尘强度,但夜间没有能见度,因此并未对算法夜间的适用性进行检验。研究过程中发现方法对于沙尘强度存在一定的高估,在以后的研究中或可结合激光雷达CALIPOSO垂直结构做进一步修正的探究。3 结果与分析

4 结论与讨论