内埋式武器舱舱门随动机构动力学仿真与优化分析
2023-07-25蒲克强王振东刘明辉
蒲克强 王振东 刘明辉
作为拥有极高隐蔽突防能力的攻击型飞行器,隐身无人机已经成为世界各军事强国重点研究的装备。传统外挂式武器会大大增加无人机的飞行阻力,影响无人机作战的机动能力,增加无人机雷达截面积,不利于无人机隐身性能的优化。无人机采用内埋式武器舱装载弹药,飞行阻力明显减小。同时,无人机机体表面的尖锐、突出、缝隙、边缘等形状数量大大减少,有利于满足无人机隐身性的需求,内埋式武器舱势必成为高隐身性无人机武器装载设备的主流发展方向。然而,内埋式武器舱的运动机构等设计较为复杂,是武器舱研发的技术难点。
目前,美军X-47B无人机采用了内埋式武器舱,我国内埋式武器舱舱门技术处于研究和试验阶段。国内众多学者对内埋式武器舱技术进行了大量研究,有学者基于分析软件,建立了多体仿真模型,对舱门机构中的曲杆的疲劳寿命进行仿真分析;一些学者对联动舱门机构的运动干涉问题进行复现,并提出相应解决措施;其他学者对内埋式武器舱进行随机振动分析和试验,地面振动台的振动试验结果证明了有限元计算结果的准确性;另外一些学者制造了与真机尺寸相同的武器舱地面试验件,测量舱门的铰链力矩,并验证校准方法和数据处理方法的可行性。
随动机构的工作原理
武器舱舱门由主舱门和随动舱门组成。技术人员设计随动舱门,目的是减小主舱门最内侧的悬臂段长度,减小舱门与侧壁间的运动间隙值。武器舱机构由驱动机构和随动机构组成。驱动机构由液压系统驱动,带动主舱门旋转;主舱门旋转带动随动机构运动,随动机构运动带动随动舱门旋转,从而实现整个舱门的开启与关闭。本文以武器舱舱门的随动机构为例,介绍该机构的工作原理。
驱动机构带动四连杆机构运动,四连杆机构带动随动舱门运动,实现随动舱门的开启与关闭。
通过研究总体设计要求,本文提出一种武器舱舱门的设计约束。
1.如果轨迹2与侧壁区相交,新的侧壁区位置与轨迹2之间需保留15mm的距离。
2.随动舱门沿轨迹2运动且运动到完全打开的位置,与主舱门沿轨迹3运动且运动到完全打开的位置之间应保留5mm间隙。
3.线段AB和BC的夹角不超过180°,且AB+BC>CD+DA。
4.考虑结构厚度,轨迹4与主舱门之间的间隙应保留5mm。
5.主舱门运动角度>120°,而实际需求是100°。
线段AB的长度由旋转作动器确认为40mm。根据约束条件,本文对随动机构的位置和长度进行求解。舱门关闭时的尺寸图详见图2。
机构刚体分析
随动机构由连接主舱门的弯曲接头、曲杆,连接随动舱门的旋转接头,连接固定壁板的固定接头组成。
为获取运动过程的力矩函数、运动函数以及各部件之间的轴销力,本文分析方案布置及运动关系的合理性,并对整个随动机构进行刚体分析。
在已设计的机构模型基础上,本文选取单组舱门的随动机构(舱门共6组,其余5组与本文选取的单组舱门相同)进行多刚体动力学分析,首先假设固定接头、曲杆、弯曲接头、随动旋转接头均为刚体(后面写的是4个机构件),获得4个机构件的几何尺寸和质量特性,各机构件间的轴销通过运动副进行模拟。技术人员将各机构件的材料性能数据输入LMS软件,材料性能数据详见表1,各机构件均由铝合金制成。
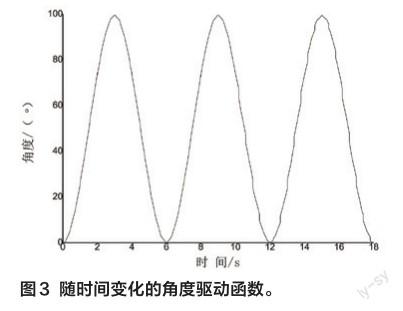
本文在弯曲接头和主转轴轴心的铰接位置施加3个运动周期的驱动函数,驱动函数如图3所示。
本文对随动机构施加三点力矩,以模拟随动机构上的气动载荷。主舱门和随动舱门上的铰链力矩分别传递到弯曲接头和随动旋转接头上。
舱门的驱动机构作用在单组作动器上的驱动力矩如图4所示。总驱动力视为单组的6倍,其方向与铰链处的力矩方向相反。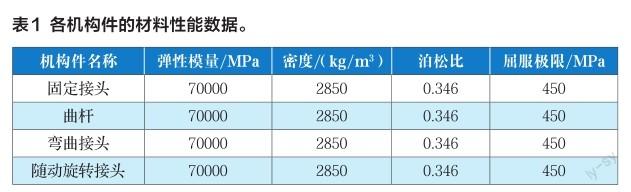
在设计随动机构时,本文根据工程经验将随动舱门的偏转角度控制在88°以内,这是为了尽量减小随动舱门开启所占据的侧壁空间,以保证侧壁缘条的宽度,留出足够的装配尺寸和侧壁刚度,同时保证主舱门和随动舱门开启时,两者之间的距离达到最大值,尽可能保证主舱门和随动舱门在运动时无干涉隐患。
弯曲接头与曲杆、曲杆与随动旋转接头、随动旋转接头与固定接头之间通过螺栓进行联结,形成整体结构件。本文对该整体结构件进行刚体计算,机构连杆间的轴销力相同。单个轴销力在主舱门闭合时的数值最大,轴销力最大值为1350N,按螺栓在孔内的接触面积计算,轴销载荷约3.5MPa,载荷较小。
刚柔耦合分析
在分析刚柔耦合前,本文需确认刚性和柔性零件的界定,弯曲接头、曲杆、随动旋转接头作为传动杆件,是柔性零件,驱动转轴和固定接头为刚性零件。本文利用刚柔耦合分析软件对上述柔性零件和刚性零件进行模型简化分析,简化模型去掉了舱门结构,主舱门结构的质量几何特征等效附加到弯曲接头上,随动舱门的质量几何特征等效附加到随动旋转接头上。
有限元模型是动应力分析的基础。为获得柔性零件的准确载荷历程,本文对各杆件进行网格划分及柔性化处理。
曲杆应力和变形分析
在LMS软件中,本文以多点耦合(MPC)单元相互连接的形式,表征曲杆连接孔的特性,同时建立4面體网格,网格数量9148,将网格模型导入LMS软件进行柔性化处理,并设置连接和求解器。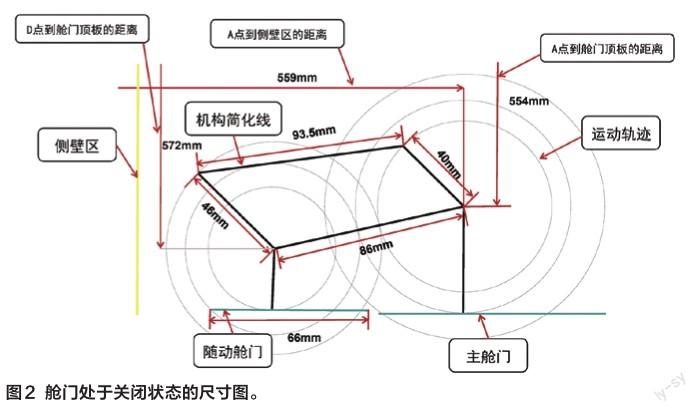
本文对曲杆的准确载荷历程进行求解,得到的结果是,曲杆最大应力出现的时间是舱门开启0.03s的初始时刻,最大应力位置出现在曲杆弯曲处的内侧,最大应力为235MPa。曲杆最大变形位移也出现在舱门开启0.03s的初始时刻,最大变形值为0.456mm,变形位置出现在联结曲杆与随动旋转接头的螺栓的下边缘。
由曲杆应力和变形分析可知,曲杆设计的安全裕度较大,曲杆变形较小,应力水平较适中。曲杆结构设计相对合理。
因弯曲接头和随动旋转接头为主舱门和随动舱门的简化分析结构,弯曲接头和随动旋转接头的柔性分析对舱门设计的参考意义不大。主舱门和随动舱门的耦合分析,仅作为通用分析方法供参考。
弯曲接头、曲杆、随动旋转接头刚柔耦合分析
本文对弯曲接头、曲杆、随动旋转接头3个传动杆件进行刚柔耦合综合模型分析,建立耦合模型。
前文分析结果显示,曲杆最大应力为235MPa,曲杆最大变形值为0.456mm。因弯曲接头和随动旋转接头的柔性缓冲均相应减小,耦合模型最大应力和最大变形值出现的位置和时间均未发生改变。由此可见,如果弯曲接头及随动旋转接头载荷分摊到整个舱门壁板上,弯曲接头上的实际载荷应小于当前分析值。
曲杆与弯曲接头的孔端载荷曲线因柔性化后,柔体特征会出现局部尖峰,属正常现象,本文可不做考虑。
弯曲接头的最大应力为926MPa,随动旋转接头的最大应力为23.5MPa。因这两种接头均为舱门的简化模型,载荷分布差异较大,精确的载荷需带入整体模型后才能被分析。由分析结果可知,随动旋转接头载荷较小,达到了结构减重的目的。
随动机构优化设计
本文根据舱门工作原理,对随动机构进行设计,并以应力、应变、变形值作为目标值,在保证不影响舱门开闭的前提下,对机构尺寸进行优化,以达到机构减重的目的,从而获得最优的特征尺寸。
根据上述刚柔耦合分析结果,本文利用经过LMS软件优化的模块对机构尺寸进行优化,对未简化的曲杆进行优化分析,并对曲杆参数进行优化设计,将分析结果作为输入参考,设置优化参数并进行计算。本文已知曲杆最大应力为235MPa,曲杆最大变形值为0.456mm,以前文计算所得的應力和应变为取值目标,设置目标优化参数。
通过优化参数递交求解,本文得到曲杆最大应力为343MPa,最大变形值为0.674mm,最大应力和最大变形出现的时间变为舱门开启0.02s的初始时刻,且曲杆的变形值未对机构运动产生干涉。优化前后的曲杆参数如表2所示。
由优化后的结果分析可得,曲杆零件较简单,优化后的参数不影响曲杆设计,但上筋条孔位间距优化后是16mm,会造成曲杆在运动过程中出现少量干涉,故曲杆设计仍选用20mm的上筋条孔位间距。曲杆重量由0.122kg减到0.09kg,减少了0.032kg,即重量减轻了26%。优化后的参数能够满足曲杆的正常运动要求,优化的结构方案及分析方法可行。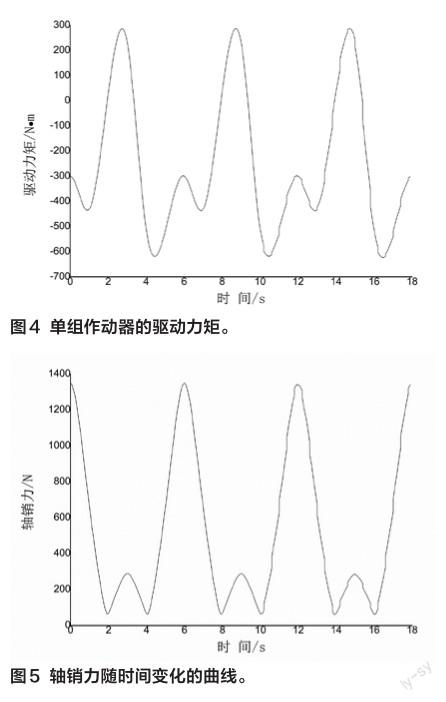
结束语
本文根据约束条件,对随动机构运动方案进行合理设计,结合LMS软件对所设计的随动机构进行动力学分析和优化,验证了运动方案的合理性。本文取得如下收获。
一是从武器舱结构工程应用出发,根据设计要求和设计约束,本文对随动机构进行合理设计,并对机构进行刚体分析和刚柔耦合分析,分析机构运动卡滞的风险,保证机构运动的可靠性。
二是本文对柔性化后的机构的特征尺寸进行优化,在满足运动功能及性能要求的前提下,机构减重效果显著。
三是本文提出的动力学分析方法可以应用于折叠部件、起落架、副翼、伞舱等无人机运动机构的分析与评估,工程实用性广。