国外舰载无人机着舰引导技术浅析
2023-07-25张茂宋平
张茂 宋平

随着现代战争逐渐呈现无人化作战趋势,以及海上综合作战能力不断提高,舰载无人机已成为一种必须发展的装备。舰载无人机部署在航空母舰、驱护舰、两栖舰等舰艇上,搭载不同的任务载荷执行监视、侦察、目标指示、通信中继、战场毁伤效果评估、辅助探潜等任务,能够有效提升海军舰艇编队的作战能力。
在着舰过程中,舰载无人机会面临舰面湍流、甲板晃动等复杂多变的环境,虽然着舰用时较短,但着舰过程发生的事故却占飞行任务总事故的 80%左右,而精确着舰引导技术可极大提升无人机在着舰过程中的安全性,是实现无人机上舰的关键技术,也是舰载无人机发展需要重点研究的技术。由于技术门槛高,目前世界上装备舰载无人机的国家仅有美国、法国、奥地利等国家,美国X-47B舰载无人机在航母上实现了自主着舰,突显了成熟的着舰引导技术,美国“火力侦察兵”系列、奥地利“坎姆考普特”系列等舰载无人直升机也成功运用了着舰引导技术。国外着舰引导技术对我国舰载无人机的发展具有重要的参考意义。
着舰引导技术
着舰引导技术可以持续提供精确的机舰相对位置、姿态参数等信息,生成基准下滑轨迹,测量或计算轨迹跟踪误差等数据,引导无人机准确到达指定位置。国外舰載无人机主要使用雷达、卫星、光电、视觉等着舰引导系统进行着舰。
雷达引导技术
国外雷达引导技术相对成熟。美国内华达山脉公司(Sierra Nevada)研制的“无人机通用自动回收系统”(UCARS)已成功引导“火力侦察兵”无人直升机自主着舰(见图1)。法国DNCS公司采用雷达引导技术成功研发了D2AD舰载无人机自动着舰引导系统,该系统在“拉斐特”级护卫舰上已完成着舰引导试验。加拿大CL-227/327无人机采用应答式3毫米波雷达引导技术实现了自动着舰。
雷达引导系统采用二次雷达机制,由舰载雷达和机载二次雷达应答机组成,可实时测量无人机与舰船的相对位置。舰载系统获得雷达原始数据后,通过数据稳定处理、坐标变换等方法,得到准确的机舰相对位置信息,雷达引导系统依据机舰相对位置信息,实时规划一条理想下滑轨迹,并算出无人机位置与理想下滑轨迹之间的偏差,结合舰船甲板的运动数据,对偏差数据进行补偿,然后通过数据链将补偿后的偏差数据上传至机载飞控系统,飞控系统的轨迹引导律对偏差数据进行解算,得到引导指令,该引导指令通过飞行控制律计算后,转化为位置、速度、姿态控制指令,控制指令被输入舵机,舵机控制无人机完成自动近舰与着舰。
雷达引导系统可在云层较低、能见度较差的环境下使用,具备较强的目标探测跟踪能力和较好的隐蔽性,不易被敌方干扰,作用距离可达数十千米。但是,雷达引导技术也有缺点,即定位精度不高。受限于雷达的安装位置,在近距离引导无人机着舰时,雷达引导系统常存在盲区,全过程引导效果欠佳。此外,雷达引导系统的价格较高。
光电引导技术
目前,国外舰载无人机着舰所采用的光电引导系统主要有法国DNCS公司研制的SADA甲板自主引导系统、美国DRS公司研制的基于光电引导技术的进近着舰虚拟成像系统,这两种系统均已成功引导舰载无人机自主着舰。光电引导系统是一种基于多源光电传感器技术的引导系统,综合使用高精度激光跟踪测距单元、高灵敏度红外热成像单元以及高分辨率电视摄像机等设备,完成偏差数据测量,系统的精准控制能力可消除偏差,实现无人机安全着舰。在光电引导系统中,激光跟踪测距单元跟踪舰载无人机,实时测量无人机的飞行速度、方位角、高低角、机舰距离等信息,红外热成像单元和高分辨率电视摄像机获取无人机的图像和影像信息。
由于作用距离较短,光电引导系统适用于舰载无人机精确进近及最后着舰阶段。它具有定位精度高、抗电磁干扰性强、隐蔽性强,可在无线电静默条件下工作等优点,主要利用光电设备引导无人机着舰,因此天气适应性不高,在恶劣天气条件下可能无法正常工作,因此通常与其他引导系统结合使用。
卫星引导技术
卫星引导系统主要采用实时动态载波相位差分定位技术对机舰相对位置进行解算,解算精度可达厘米级。国外舰载无人机卫星着舰引导系统已广泛应用,例如美国JPALS联合精密进近着陆系统,X-47B舰载无人机在该系统引导下,已完成自主着舰;法国希瑞纳公司(SIREHNA)ADS自主着舰系统实现了5级海况下的无人机自主着舰;奥地利S-100“坎姆考普特”无人直升机使用基于差分GPS的卫星引导系统完成了自主着舰。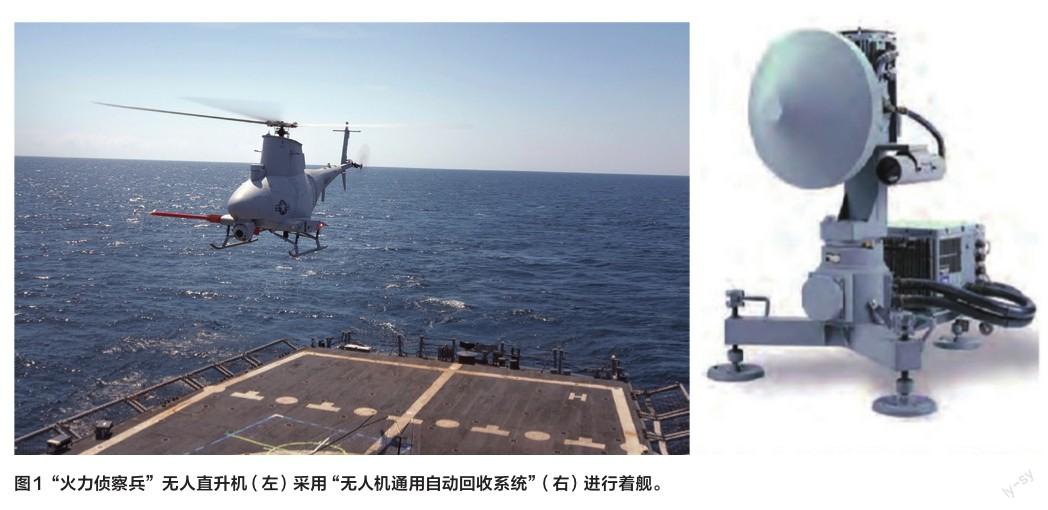
卫星引导系统由舰载基准站和机载移动站构成。其中,舰载基准站包括卫星接收天线和卫星接收机;机载移动站主要由卫星接收天线和卫星接收机组成。当系统引导无人机着舰时,舰载卫星接收机通过舰载卫星接收天线接收卫星信号,并将多个卫星的伪距、载波相位等测量信息通过数据链发送至无人机机载移动站,机载移动站的数据处理模块将收到的舰载测量数据和机载卫星测量数据构建差分观测方程,然后数据处理模块根据差分观测方程,解算出无人机与舰船的原始相对位置数据,经坐标变换后,得到准确的机舰相对位置数据,卫星引导系统根据机舰相对位置信息,实时规划一条理想下滑轨迹,并算出无人机位置与理想下滑轨迹的偏差,结合甲板运动补偿数据,生成着舰引导参数,从而引导无人机自动着舰。
卫星引导系统具有组成相对简单、尺寸小、成本低、使用不受时间地点限制等优点,定位精度比雷达高,对近距离目标的定位具有更为明显的优势。但是,它易受电磁干扰,不适合战时使用,在引导过程中,接收卫星数量的变化有时会导致位置解算值出现一定程度的波动,所以通常与惯导系统组合使用。
视觉引导技术
视觉引导是系统通过视觉传感器实时搜索并获取位于舰船甲板上的合作目标图像信息,利用图像实时处理技术对合作目标的特征信息进行提取和匹配,完成位置和姿态解算,从而获得无人机相对于舰船甲板的位置和姿态,通过数据链,将机舰相对位姿信息发送给机载飞控系统,以引导无人机精准着舰。视觉引导系统有两种架构,一种是视觉传感器和图像处理器等设备安装在无人机上,采用该架构的系统可将处理后的着舰参数直接发送给机载飞控系统,以引导无人机着舰,但图像处理器性能会受机载设备重量的限制;另一种是视觉引导系统安装在舰上,舰载视觉引导系统将处理后的着舰参数信息通过无线数据链传送至机载飞控系统,以引导无人机着舰,采用该架构的系统利用性能强大的舰载图像处理器对复杂图像进行处理,但无线数据传输会有一定的时延。
图像处理算法的实时性和准确性是视觉引导取得成功的关键要素,直接影响定位精度。由于舰载无人机视觉引导系统对图像处理技术要求非常高,目前仍处于理论研究和工程试验阶段。舰载无人机视觉引导技术无疑是新兴技术,具有抗电磁干扰性强、隐蔽性高、使用灵活等诸多优点,在引导无人机着舰时,能获取大量外界信息,拥有良好的发展前景。
各种着舰引导系统对比
通过上述着舰引导技术分析,本文总结各种系统的优缺点和适用范围,如表1所述。
由表1可知,单一着舰引导系统在使用中具有较大的局限性,全过程引导的适用性较差,不能充分满足舰载无人机精确自主着舰的需求。在着舰引导过程中,舰载无人机经历不同的阶段,舰载固定翼无人机着舰引导过程可细分为平飞、下俯、下滑、进入和着舰五个阶段;而舰载旋翼无人机具有空中悬停、低速飞行、无需在起降场地滑跑等特征,其着舰引导过程与固定翼无人机有所不同,大致分为进场下滑、悬停跟进和快速下降着舰三个阶段。虽然两者着舰引导过程中的各个阶段截然不同,但两者的着舰引导全过程可分为两个阶段,即远距着舰进近引导阶段和近距着舰引导阶段,详见图2。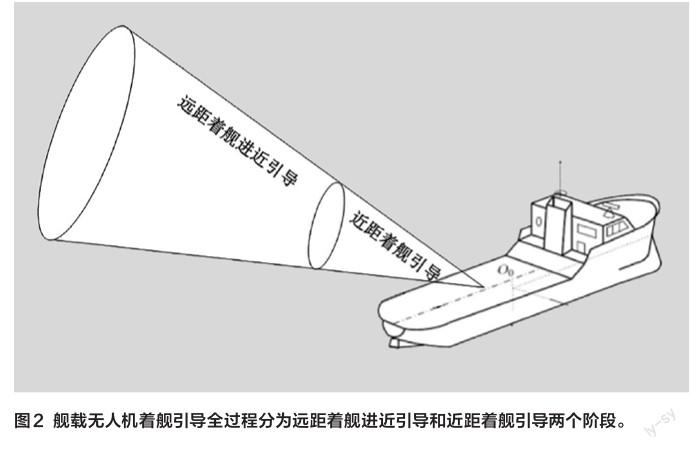

远距着舰进近引导旨在将舰载无人机引导至合适的着舰区域,在该区域内,无人机飞行航向要与舰船航向保持一致,该阶段并不需要十分精确的机舰位姿信息,适合使用雷达或卫星等远距着舰引导方法。
近距着舰引导的目的是,把舰载无人机精准地引导至舰船甲板的着舰区域,实现无人机的成功降落。因此,该阶段需要实时、精确的机舰位姿信息,且对引导信息的精确度、可靠性、实时性等指标提出了较高要求。视觉、光电、差分GPS卫星等引导系统在该阶段使用更具优势。
因此,着舰引导工作应分析每个着舰阶段的特征和每种着舰引导系统的优缺点,合理组合和应用不同的引导系统,才能保证舰载无人机安全、自主着舰。
总结与展望
着舰引导技术是保障舰载无人机安全着舰的关键技术。本文对多种着舰引导技术进行展望。
单一着舰引导技术的引导效果较差,难以满足高精度自主着舰的需求。而根据各引导阶段的特点以及各引导系统的优缺点,不同引导技术合理组合与使用,可对无人机进行逐段引导,这是一种实用性强、行之有效的引导方案。
差分GPS卫星引导技术在各引导阶段的适用性较其他引导技术拥有较好的引導效果,但由于GPS会受到美国的限制,在战时不宜使用,只有当我国北斗卫星导航系统的性能大幅提升后,卫星引导才可能成为主要的着舰引导手段。视觉引导技术是未来着舰引导领域的发展方向,因此我国应大力发展高效的图像实时处理技术。
随着多源传感器数据融合、基于深度学习的着舰环境感知等技术的不断进步,未来着舰引导技术将会向多源信息融合引导技术方向发展,舰载无人机全自主着舰的安全性和可靠性有望大幅度提高。