智能网联环境下快速路入口匝道改进协同合流模型
2023-07-14肖代全康圣洋徐学才申振武
肖代全,康圣洋,徐学才,申振武,袁 泉
(1.华中科技大学 土木与水利工程学院,湖北 武汉 430074;2.深圳市城市交通规划设计研究中心股份有限公司,广东 深圳 518057;3.武汉华科全达交通规划设计咨询有限公司,湖北 武汉430074;4.清华大学 车辆与运载学院,北京 100084)
0 引 言
随着我国机动车保有量的持续增加,交通供需矛盾愈加尖锐。快速路入口匝道在高峰时段常发生拥堵,已成为快速路拥堵的主要诱因。因此,疏解快速路堵塞的主要思路是解决入口匝道拥堵问题。快速路匝道控制和主线可变限速是早期解决入口匝道拥堵的主要手段,随着车联网技术的发展,一定范围内车辆间的信息实时共享成为可能,协同合流控制成为解决入口匝道拥堵的新手段。为减少入口匝道车辆汇入对主线车流的影响,各国对匝道控制进行了大量研究,使匝道控制从早期的定时控制发展到当前的启发式控制、最优控制及协调控制。
针对主线可变限速控制,已有的研究主要分为两类:以S. SMULDERS[1]、E. van den HOOGEN等[2]、E. J.HARDMAN[3]为代表的一类强调均匀化效应,即通过限速减小速度差,实现更稳定和更安全的交通,目的是改善空气质量和提高安全性;以CHIEN Chengchih等[4]、H. LENZ等[5-6]等为代表的另一类则是强调通过限速来减少流量,从而防止交通拥堵的产生。
在协同合流层面,日本学者A. UNO等[7]最早提出虚拟车队的概念,即将匝道上的车辆投影到主线上,把合流问题转化成虚拟车队的跟车问题;WANG Yunpeng等[8]采用虚拟车队研究了匝道上不同合流情况对主线车流的影响,研究表明:与车队汇入主线相比,单辆车汇入主线对主线车流影响更小;CAO Wenjing等[9]建立了一个基于加速度、速度和距离的非线性优化模型(惩罚函数最小化为目标),用以预测匝道车辆合流效果;XIE Yuanchang等[10]将匝道合流控制描述为一个非线性优化问题,以10 s为间隔,采集VISSIM车辆信息,构建了车辆合流过程中瞬时速度最大的非线性优化模型;刘畅等[11]通过构建入口匝道的车辆最优车速控制模型,对各相邻车辆到达合流点的时间进行了设计,最终实现协同合流。
综上,在主线可变限速以及匝道控制方面,已有研究较为成熟,效果较好。但在快速路入口协同合流控制方面,现有研究多是单一考虑协同合流过程中的跟车或者换道问题,鲜有同时考虑跟车和换道。
为了减少车辆在合流过程中停车观察及启动加速造成的延误,均衡快速路内外车道交通量,避免快速路车流集中在内侧车道而造成匝道车流无法汇入,笔者应用智能网联环境下的合流区车辆实时控制,研究基于主线外侧车道与匝道协同合流,兼顾主线车辆间的协同换道过程,采用虚拟车队对协同合流过程中的跟驰和换道模型进行改进。
1 建模过程
1.1 场景设置
图1为单个入口匝道协同合流工况示意,对研究场景做以下设定:

图1 单个入口匝道协同合流工况示意Fig.1 Schematic diagram of collaborative merging conditions for a single on-ramp
1)快速路为单向双车道,设计速度为80 km/h。
2)在入口车流合流过程中,协同合流主要针对快速路主线外侧车道和入口匝道车流。
3)入口匝道为单车道,匝道车流的行驶速度可以与主线车流的相同。
4)入口匝道为无控制匝道,无控制环境下匝道车流到达合流点后寻找主线间隙进行合流。
5)交通流组成为:Q大车∶Q中车∶Q小车= 1∶1∶8。
6)车联网环境下车辆间的实时通讯没有延迟。
1.2 协同换道的改进
1.2.1 基于虚拟车队的协同合流过程
虚拟车队的本质是将匝道上的车辆投影到主线外侧车道上,把合流问题转化为主线外侧车道上的虚拟车队跟车问题。图2为基于虚拟车队的纵向合流示意。

图2 基于虚拟车队的协同合流示意Fig.2 Schematic diagram of collaborative merging based on virtual platoon
当匝道车辆到达匝道检测点Sr、主线车辆到达主线检测点Sf时,启动协同合流控制,即把匝道车辆B投影到主线的外侧车道上形成虚拟车辆B′,此时匝道车辆B与主线车辆A、C之间的协同合流问题转化为主线外侧车道上车辆A、B′与车辆C的跟车问题,车辆C的前车不再是本车道上的车辆A,而是虚拟车辆B′。
纵向控制的核心是根据设定的规则,控制车辆A、B′和C,当匝道车辆B通过合流点时,虚拟车队A-B′-C转化成实际车队A-B-C。
1)虚拟车辆的生成
笔者采用时间规划法来解决虚拟车辆的生成问题。当车辆到达控制区时,通过车联网技术获得车辆的实时信息,即可计算出车辆到达合流点O的时间。图3为合流区匝道车辆及主线外侧车道车辆到达合流点时间的时间轴。图中:tA、tB、tC…分别为车辆A、B、C…到达合流点O的时间,时间轴上距离坐标原点0越近,表示到达合流点的时间越短,在虚拟车队中的序号越小。

图3 时间轴示意Fig.3 Schematic diagram of time axle
时间轴进行实时更新,若合流控制区检测到车辆D驶入,则把tD添加到时间轴上,合流过程中与前车的最小安全间隔dsafe在时间轴上表示为最小安全时距Δt,并有
dsafe=v·Δt
(1)
式中:v为车速,m/s。
当匝道和主线车速一致时,最小安全间隔dsafe为定值。
当控制区有多辆车进行合流时,虚拟车辆在时间轴上的排序可能位于主线车辆之前,也可能位于主线车辆之后,但是不论何种情况,均是匝道车辆位于中间的特殊形式。笔者以匝道车辆排序在主线两辆车之间的情况为例进行分析。匝道车辆B的运动方程如式(2)、式(3):

(2)
(3)
式中:xB(t)、vB(t)、aB(t)分别为匝道车辆B的行驶距离(m)、速度(m/s)及加速度(m/s2)。
匝道车辆B行驶过程中还需满足安全性和舒适性要求:
amin≤aB(t)≤amax
(4)
(5)
式中:amin、amax分别为匝道车辆满足安全行驶的最小、最大加速度,m/s2;χa为车辆满足舒适性要求的加速度变化率,m/s3。
2)虚拟车队的生成
图2中匝道车辆B到达匝道检测点Sr时开始合流控制,此时刻记为t0;匝道车辆B到达合流点O时结束合流控制,此时刻记为tend。
采用虚拟车队进行合流控制的目的是:在匝道车辆B到达合流点O前的tvirt(t0≤tvirt≤tend)时刻,使主线上合流车辆A、B、C在主线外侧车道上形成虚拟车队A-B′-C,并且在[tvirt,tend] 期间保持虚拟车队行驶,直到tend匝道车辆B经过合流点O,虚拟车队A-B′-C转化成实际车队A-B-C。
在[t0,tvirt] 期间,合流控制的目的是:调节控制区车辆A、B、C的速度,使得在tvirt时刻车间距满足虚拟车队的要求,即:
tC-tB=tB-tA= Δt
(6)
以安全距离的形式来表示,即:

(7)
dAB′=vB(tvirt)·Δt+LA
(8)
式中:|SrO|、|SfO|分别为匝道、主线检测点至合流点的距离,m;LA、VA(t)分别为主线车辆A的长度(m)和行驶速度(m/s);dAB′为虚拟车辆B′与前车A之间的跟车距离,m,dAB′随时间而变,如式(9):
dAB′(t) = |vA(t)-vB(t)|·t
(9)
同理,匝道车辆B与主线后车C在tvirt时刻满足最小安全间隔要求,表达式与式(7)类似。
tvirt时刻主线车辆A、C满足式(10)、式(11):
tC-tA= 2Δt
(10)
dAC=dAB+dBC=vB(tvirt)·Δt+LA+
vC(tvirt)·Δt+dB
(11)
式中:dB为主线车辆B至合流点的距离,m。
1.2.2 考虑换道效益的协同换道过程
快速路上行驶的车辆换道过程包括横向和纵向运动两部分,快速路设计车速较高,换道过程的横向运动距离即为车道宽(3.75 m),纵向运动距离为车辆换道过程中的行驶距离。考虑到换道过程持续时间较短,一般人工驾驶环境下换道过程持续2~3 s,车联网环境下假设车辆换道在1 s内完成,因此,笔者研究时不考虑车辆的横向运动,文中所述的速度和加速度均指纵向运动方向的速度和加速度。
1)单车换道决策
工况1 基于安全准则换道。当快速路上的车辆产生换道需求,首先判断换道过程安全,然后进行换道行为。基于安全准则换道采用可接受间隙模型。图4描述了包含4辆车的换道情景。

图4 可接受间隙示意Fig.4 Schematic diagram of gap acceptance
目标临界间隙d是为了保证换道车辆n在换道过程中不与目标车道的前导车a和跟随车b发生侧擦和碰撞的最小可接受间隙,d的大小与车辆a、b、n的车速有关。换道车辆n产生换道需求是为了追求更大的行车空间或者行驶速度,因此,有理由假定在可接受间隙模型中,车辆b、n、n-1之间的车速存在如下关系:vb≥vn>vn-1。
由跟驰理论可知,车辆的加速度和速度主要受前导车车速的影响。未换道时,车辆n的前导车为车辆n-1,车辆b的前导车为车辆a;换道完成后,车辆n的前导车变成车辆a,车辆b的前导车变成车辆n。目标临界间隙d与d1、d2存在如下关系:
d=d1+d2+Ln(Ln为车辆n的车长)。
基于假设va≥vn,换道过程中换道车辆n与前导车a之间的距离d2只需要满足最小跟车距离即可;因此只需讨论vb≥vn情况下,换道车辆n与后续车b之间的安全距离d1的计算问题。
情景1 换道车辆n匀速换道,此时,后续车辆b需要及时采取减速措施才不会与车辆n发生碰撞,因此,安全距离d1按式(12)计算:
(12)
式中:ab, max为后续车辆b的最大加速度,m/s2;δ为车辆宽度及合流角度影响程度系数,δ= 0.5~1.0 m;t为合流开始至车辆b减速到与车辆n速度相同的时间,s;其他符号同前。
情景2 换道车辆n加速换道,当换道车辆n加速到与前导车速度相同,且va≥vb时,后续车辆匀速行驶,则安全距离d1按式(13)计算:
(13)
式中:an, max为换道车辆n的最大加速度,m/s2;t为合流开始至换道车辆n加速到与车辆a行驶速度相同的时间,s。
工况2 基于效益准则换道。换道效益即换道车辆从当前车道驶入目标车道后能获得的行驶空间增加或舒适度增加,通常采用与跟驰模型类似的形式即加速度的改善Δa来量化换道效益。当换道车辆换道到目标车道后,换道效益Δa=a′-a> 0(a、a′分别为换道前、后车辆加速度),表示换道过程对换道车辆是有益的。
仅用Δa表示换道效益是完全个体最优的策略。换道行为对当前车道的后续车及目标车道的后续车均有影响:对当前车道的后续车,换道行为是有益的;对于目标车道的后续车,换道行为可能是负增益的。
MOBIL(minimize overall breaking induced by lane change)模型不仅考虑了换道对换道车辆的改善,还考虑了换道对当前车道后续车和目标车道后续车的影响。MOBIL模型表述为:
(14)

考虑到换道影响具有向后传播的特性,仅用目标车道和当前车道上一辆后续车的影响来反馈总效益是不全面的,因此,曲大义等[12]在MOBIL模型基础上研究了多辆后续车的影响,将效益函数拓展为
(15)
式(15)考虑了换道对后续全部车辆的影响,但实际应用中没必要全部考虑,例如:若换道车辆的当前车道后续车和目标车道后续车有20辆,计算车辆n换道过程需要考虑后续第20辆车,但是这个过程中可能第5辆车又有换道需求,且车辆n对第20辆车的影响没有第5辆换道车的影响大。为了简化运算,同时考虑到换道行为是为了追求更好的效益且对当前车道有利,笔者对式(15)进行简化得到效益函数表达式如式(16):
(16)
式(16)考虑了对换道车辆n、当前车道后续车f以及目标车道3辆后续车bj(j= 1、2、3)的影响。
换道车辆n换道决策为:在满足安全准则的前提下,若按照式(16)计算出的换道效益u大于给定的效益阈值Δa,即u> Δa,决策为换道;否则,继续保持原车道行驶。
2)协同换道决策
换道车辆依据安全准则和效益准则决策出下一时刻驾驶行为为换道时,周围车辆也可能做出同样的决策,此时,车辆间需要协同完成换道决策。设定协同换道的条件是只允许外侧车道向内侧车道换道。笔者基于以上限定条件,研究两辆车之间的协同换道决策。
工况1 换道车辆n与前导车n-1的目标换道间隙相同,如图5(a),当目标间隙足够大时,车辆n-1及车辆n可以协同合作一起完成换道;当目标间隙只能允许一辆车换道时,车辆n-1及车辆n之间存在博弈。此时,协同换道决策逻辑是换道效益最大者获得优先权。

图5 换道车辆n与前导车n-1的目标换道间隙相同或相邻Fig.5 Schematic diagram of same/adjacent lane-changing gap between leading vehicle n-1 and object vehicle n
工况2 换道车辆n与前导车n-1的目标换道间隙相临,如图5(b),如果车辆n-1及车辆n同时换道,可能导致目标车道的密度局部增大,使得整体效益不是最优;对于换道车辆n而言,如果车辆n-1换道成功,则换道车辆n再执行换道的效益可能不如保持原车道行驶的效益高,因此,该情况下需要通过协同换道决策决定下一时刻车辆的行为,保证换道效益最大化。
通过比较换道效益的大小赋予车辆换道顺序,以上两种情况下协同换道决策思路如下:
Step1当换道车辆n与车辆n-1的单车换道效益满足un≥Δa,un-1≥Δa时,换道效益最大的获得优先换道权,即u=max (un,un-1)的车辆先执行换道。
Step2当获得较高优先权的车辆完成换道后,重新计算另一个车辆的换道效益,若满足换道效益大于给定换道效益阈值(u≥Δa)时,该车可执行换道。
鉴于协同换道情况较为简单,且车联网环境下换道时间比人工驾驶环境下短,可视为瞬间(1 s)完成,因此重复Step1~Step2即可决策出两车协同换道的换道顺序,并保证换道行驶总是较保持原车道行驶效益更大。
1.2.3 采用虚拟车队的改进协同合流控制模型
采用虚拟车队的改进协同合流控制模型囊括了协同合流控制区所有车辆的跟车行驶和换道行驶。采用时间规划法生成虚拟车辆,把车辆A、B、C之间的协同合流控制问题转化成虚拟车队A-B′-C的跟车控制问题,如图6。

图6 采用虚拟车队的协同合流控制示意Fig.6 Schematic diagram of collaborative merging control based on virtual platoon
1)虚拟车队的跟车控制
协同合流控制场景下,确定换道车辆的加速度时需要考虑前导车的加速度及换道车辆与前导车之间的距离和速度差,即
an(t) =f(an-1(t), Δxn(t), Δvn(t))
(17)
式中:an(t)、an-1(t)分别为t时刻换道车辆n及前导车n-1的加速度,m/s2;Δxn(t)、Δvn(t)分别为t时刻换道车辆n与前导车n-1的距离(m)、速度差(m/s)。
式(18)为车联网环境下车辆跟车控制模型的广义形式:
an(t)=Ka·an-1(t)+Kd[Δxn(t)-Ed(t)] +
Kv[vn-1(t)-vn(t)]
(18)
式中:vn(t)、vn-1(t)分别为t时刻换道车辆n及前导车n-1的车速,m/s;Ka、Kd、Kv分别为控制系数;Ed(t)为换道车辆n与前导车n-1的期望跟车距离,m。
Ed(t)不仅与换道车辆n的车速有关,还与车辆n与前导车n-1的速度差有关。换道车辆n的车速越大,该车与前导车n-1的速度差越大,所需的期望跟车距离Ed(t)就越大。笔者借鉴智能驾驶员模型(IDM)中的期望跟车距离,表达式如式(19),将其代入式(18)即为车队中车辆的控制模型(20):

(19)

(20)
式中:T为IDM中的期望跟车时距,T= 1.5 s;d为拥挤的跟车间距,m;acom为车辆舒适加速度,m/s2;其他符号同前。
当换道车辆n是车队的领航如车或者换道车辆影响范围内没有其他车辆存在时,换道车辆处于自由驾驶状态,为了形成车联网环境下的车辆全控制模型,笔者对式(20)进行进一步拓展,车联网环境下车辆仅考虑自身的控制模型如式(21):
(21)
结合式(20)、式(21),即得到采用虚拟车队的跟车控制模型(22):
(22)
2)采用虚拟车队的改进协同合流控制模型
如图6,快速路主线只能单向换道(主线外侧车道被允许向内侧车道换道),当外侧车道上的车辆产生换道需求后,可以向主线内侧车道换道以追求更大的行车空间,同时也为匝道车辆合流提供更多的机会。因此,主线外侧车道的控制模型采用改进协同合流控制模型,包括虚拟车队的跟车控制及主线两车道的协同换道控制两部分。采用虚拟车队的改进协同合流模型控制流程如下:
Step1根据时间规划法产生虚拟车辆和虚拟车队。
Step2根据式(22)计算处于合流控制区的所有车辆下一时刻的加速度a(t)。
Step3对于主线外侧车道上的车辆,继续Step4;对于匝道和主线内侧车道上的车辆,保持原车道行驶。
Step4若车辆的前导车或者后续车为匝道车辆,继续Step5;否则,保持原车道行驶。
Step5根据单车换道决策过程进行判断,若有换道需求的车辆其内侧车道满足安全准则,继续Step6;否则,保持原车道行驶。
Step6根据式(16)计算车辆的换道效益u,若u>Δan,继续Step7;否则,保持原车道行驶。
Step7若满足单车换道决策的车辆中存在换道相互影响,继续Step8;否则,保持原车道行驶。
Step8依据协同换道决策出换道车辆,换道行驶。
Step9执行车辆的控制指令,直到下一个控制时刻。
Step10重复Step1~Step10,直到控制结束。
2 仿真过程
2.1 平台搭建
采用VISSIM和Python搭建仿真平台,仿真过程中,Python作为主控程序启动VISSIM后,通过COM接口获取VISSIM中的路网、车辆、信号控制对象的属性,利用各类函数库计算出模型、算法的控制参数,再通过COM接口反馈给VISSIM中相应的子对象,实现PythonVISSIM交互的仿真平台,仿真完成后,VISSIM生成对应的评价指标文件。
2.2 交通需求
交通需求包括主线交通量、入口匝道交通量。将武汉市三环线庙山立交07:00—09:00早高峰交通量作为仿真系统的交通量输入,高峰之前的交通量与07:00时刻交通量保持一致,高峰之后的交通量与09:00时刻交通量保持一致。采集15~135 min(共2 h)的数据作为反映交通流变化趋势的评价指标数据。
快速路主线交通量如图7(a),主线交通量随着时间推移先增后减,属于典型的凸性特征,在仿真时间T仿真= 65 min开始进入高峰,T仿真= 120 min高峰结束,高峰交通量为3 200 veh/h。入口匝道交通量如图7(b),入口匝道交通量随着时间推移先增后减,在仿真时间T仿真=70 min开始进入高峰,T仿真=115 min高峰结束,高峰交通量为700 veh/h。

图7 主线及入口匝道交通量Fig.7 Traffic volume of mainline and on-ramp
2.3 评价指标选取
评价控制模型效用的指标有总体指标和指定指标两类:
1)总体指标是从路网的层面,综合反映控制策略对通行效率的提升程度,包括:服务交通量Q、平均行程时间tav、平均延误Dav和平均车速Vav。
2)指定指标反映控制策略对控制区域局部通行效率的改善效果。仿真时,笔者选择入口匝道排队长度L0、指定距离(1 000 m)的匝道行程时间t匝道和指定距离(1 043 m)的主线行程时间t主线作为指定指标。
2.4 方案设计
针对入口匝道的协同合流模型控制验试,依据搭建的仿真平台,设计了无控制(方案1)、虚拟车队协同合流控制(方案2)及虚拟车队改进协同合流控制(方案3)仿真方案,并从路网通行效率W、入口匝道排队长度L0、指定距离的行程时间t几个层面进行计算分析。
3 结果分析
3.1 路网通行效率评价
3种控制方案的仿真结果如表1。
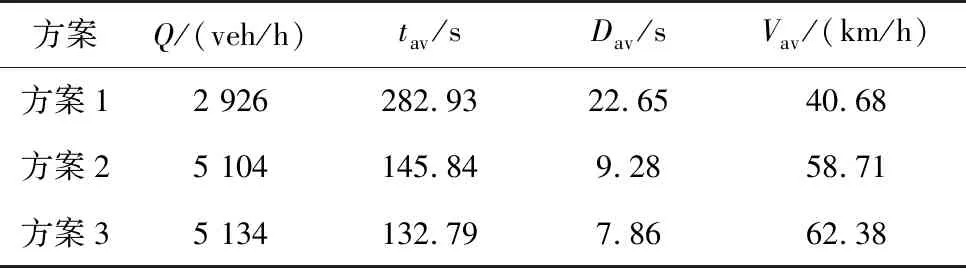
表1 路网通行效率评价
由表1可见:
1)方案1的服务交通量最小,方案2、方案3的服务交通量相当,均在5 100 veh/h以上。
2)方案1的路网平均行程时间最高,与方案1相比,方案2、方案3的路网平均行程时间分别降低了48.5%、53.1%。
3)方案1的路网平均速度最小,与方案1相比,方案2、方案3的路网平均速度分别提升了44.3%、53.3%。
4)方案1的路网平均延误最大,与方案1相比,方案2、方案3的路网平均延误分别降低了59.0%、65.3%。
综上,与无控制相比,虚拟车队协同合流控制及虚拟车队改进协同合流控制下,路网服务交通量、平均车速均得到提高,平均行程时间、平均延误均有所降低,相比而言,笔者提出的虚拟车队改进协同合流模型提升路网性能的效果更佳。
3.2 入口匝道排队长度指标评价
图8为3种方案下入口匝道排队长度L0。
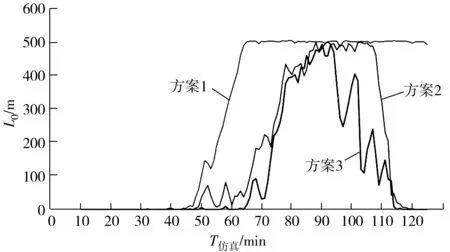
图8 入口匝道排队长度Fig.8 On-ramp queue length
由图8可见:
1)在仿真时间T仿真= 0~50 min 阶段,3种方案的入口匝道均没有车辆排队,此时,入口匝道车辆合流不受影响。
2)随着交通高峰的到来,方案2、方案3的匝道达到最大排队长度所用时间比方案1分别推迟了20、25 min;方案2高排队现象出现在T仿真= 90~110 min阶段,而方案3高排队现象仅出现在T仿真= 90 min时刻;分别在T仿真=115、110 min时刻,方案2、方案3匝道排队现象基本消散。
3)与方案1相比,方案2、方案3的匝道排队现象均有一定程度改善,相较而言,方案3改善效果更好。
4)在T仿真= 90 min时刻,3种方案下入口匝道排队长度均达到最大值。溯其原因是:T仿真= 90 min时刻,主线及匝道交通量分别为3 300、720 veh/h,入口匝道合流处车道由三车道减少为二车道,理论通行能力降低,因此T仿真= 90 min时刻,交通量超过道路通行能力,此时,主线车流具有优先通行权,匝道合流车辆只能排队等候。
3.3 指定距离的行程时间指标评价
随着车流量的改变,3种方案的匝道车辆行程时间t匝道、主线车辆行程时间t主线对比如图9。

图9 3种控制方案的匝道车辆行程时间及主线车辆行程时间Fig.9 On-ramp travel time and mainline travel time for three control schemes
由图9可见:
1)在0
2)在0
3)在0
4)在0
综上,对于匝道车辆,在交通高峰期间,与方案1相比,方案2、方案3均大幅度降低了车辆行程时间,从而提高了路网通行效率,相较而言,方案3降低更多;对于主线车辆,方案2和方案3均削弱了匝道车辆合流造成的不利影响,但方案3的主线车辆行程时间在交通高峰期间较长,分析原因是车辆换道会引起小范围的冲击波。因此,方案2、方案3均能提高路网通行效率,而方案3(采用虚拟车队的改进协同合流模型)总体上优于方案2(采用虚拟车队的协同合流模型)。
4 结 论
笔者利用智能网联环境,基于虚拟车队生成、协同换道效益分析,对协同合流过程中的跟驰和换道模型进行创新性改进,即把快速路拓展为双车道,协同合流过程兼顾协同换道,改进车辆在合流控制区的控制模型(包括协同换道和协同合流);采用Python和VISSIM搭建了交互仿真平台,设计了无控制、虚拟车队协同合流控制、虚拟车队改进协同合流控制3种方案,仿真分析了路网通行效率、入口匝道排队长度和指定距离的行程时间等指标。研究得到以下主要结论:
1)与无控制相比,虚拟车队改进协同合流控制及虚拟车队协同合流控制在入口区域的通行效率均有所提高,且前者的改善效果更好。
2)虚拟车队改进协同合流控制及虚拟车队协同合流控制均能大幅降低高峰期间车辆行程时间,同一时段,前者的匝道车辆行程时间更短。
3)虚拟车队改进协同合流控制及虚拟车队协同合流控制均削弱了匝道车辆合流对主线车流的影响;虚拟车队改进协同合流控制下,由于车辆换道会引起小范围的冲击波,主线车辆行程时间在高峰期间相对较长。
