双波长激光路面气象传感方法
2023-07-12龙俊宇吴德操罗彬彬张颖郭裕丰曹盛邓磊赵明富
龙俊宇,吴德操,罗彬彬,张颖,郭裕丰,曹盛,邓磊,赵明富
(重庆理工大学 光纤传感与光电检测重庆市重点实验室,重庆 400054)
0 引言
道路积水、结冰等情况会大幅降低轮胎与地面之间的摩擦系数,使得车辆控制困难,产生安全隐患[1-2],路面气象状况恶劣导致交通事故显著增加[3-5]。在高风险路段安装路面气象传感器,对过往车辆发布实时预警,可有效降低事故发生率,同时也能为路政人员的道路维护作业提供信息支持。
目前主流采用的路面气象传感方法是接触式测量法,包括测量电导率判断路面湿滑程度[6]、根据电容量变化检测气象状态的不同阶段[7]、通过光纤进行连续实时监测路面状况[8]等,这类方法灵敏度和精度都比较高,但需要在路基上打孔安装,灵活性较差,也容易因车辆碾压而损坏。非接触式遥测法则可避免上述问题,如VIIKARI V V等[9]利用车载雷达比较不同极化的后向散射信号,可检测到由道路上的水、冰或雪引起的低摩擦点,但探测的路面气象信息较少;DEWANGAN D K等[10]根据道路视觉信息对路面分类,提出了一种基于卷积神经网络的道路分类网络,能精确分类出弯曲、干燥、结冰、粗糙和潮湿的路面,但该方法易受照明条件影响;CASSELGREN J等[11]使用近红外相机,在三种特征波长下成像,通过图像分析识别路面气象状态,但成像设备昂贵,无法普及应用;徐松松[12]应用红外激光法分辨了多种状态,但识别率不高,无法测量积水、结冰厚度等。芬兰Vaisala公司研制的DSC111激光传感器,实现了远距离、高可靠性的路面状态判别,并可对2 mm以内的积水、结冰厚度进行测量,在市场上处于垄断地位[13]。其价格较为昂贵,相关技术也被列为商业秘密,未见公开报道。
2021年,本课题组的柳鹏[14]利用红外激光反射测量法成功完成了积水、结冰等状态的判别,以及积水厚度的测量,精度达到±0.2 mm,但针对不同的路面条件还需要进行现场积水标定,实际应用存在一定困难,且尚未实现对结冰厚度的测量。在此基础上,本文研究了基于激光与红外测温的混合路面判别方法和相对反射率零点自动校准方法,可检测更丰富的路面状态,实现无需现场标定的积水、结冰厚度测量。
1 基本原理
1.1 路面积水、结冰厚度的测量模型
本系统的光束传播示意图如图1所示。其中,D为水、冰厚度,l为单次光路程;光强为I0的光,以θ为入射角,照射到水、冰表面后,形成反射光强I0′和后向散射光强Ir′;进入水、冰表面后的光强为I1,折射角为α,由水、冰吸收的光强为Ia;到达路基表面的光经后向散射,并再次吸收,得到的光强为I2,此时在水、冰表面的反射光强为I2′;最终,到达空气中的光强为Ir。
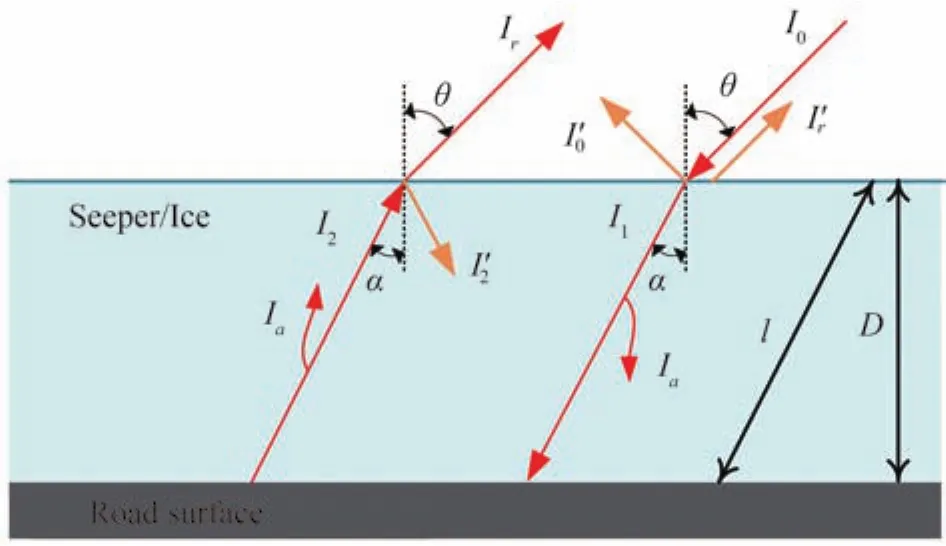
图1 光束传播示意图Fig.1 Diagram of beam propagation
根据朗伯比尔定律[15],I0与Ir满足
式中,光程l=D/cosα,h为路面的后向反射率,T1、T2为水、冰表面透射率,k为摩尔吸光系数。若在Ir方向上数米外的距离放置光源与光电探测器,为消除光束在空气传播中光强衰减对测量的影响,定义相对反射率R满足
式中,Id为探测光强,Idry为干燥路面标定光强,d为空气衰减系数,h′为干燥路面反射率,p=h/h′表示不同路面在非干燥状态下的后向反射率变动系数。由式(2)可知,水、冰厚度为
其中,
在水、冰吸光度相对适中的1 310 nm波长下[14],k不变,参数c1仅与折射角α有关,若入射角θ的设计范围为 35°~55°,则积水时α为 25°~38°,结冰时为 26°~39°,变化较小。因而,可将参数c1视为常数,通过实验室标定获得。
参数c2为D随R变化的基线漂移量,与路面反射率和入射角度有关。根据式(3),c2可使用积水/结冰厚度零点的路面反射率R0进行标定,即
但在路面含水时,水分子会填充道路孔隙,使路面变得平整。此时,路面将由干燥时的漫反射转为镜面反射为主,后向反射率会明显减弱,即p<1。经研究发现,路面吸水性越强、孔隙越多,干燥与积水状态路面的后向反射率差异越大。因此,Idry与积水/结冰厚度的零点光强并不等价,无法用其标定c2,一般需要在检测现场根据路面特性进行即时测算。
然而,现场人工标定c2十分困难,将大幅增加该方法的使用难度。由于自然降雨是一个连续变化过程,而水在1 430 nm附近具有很强的吸光率[14],使得该波长下的反射率R1430在路面潮湿-积水临界状态下可发生阶跃改变。基于该特征,同步记录此刻1 310 nm处的反射率R1310并记为R0,即可根据式(5)实现对c2的自动标定。那么,即使同一路面因为路面磨损、色彩灰度改变等原因引起c2改变,也可通过对c2的自动跟踪标定,实现传感器的长期稳定工作。
1.2 传感器结构
传感器结构如图2所示,主要包括光学系统和电路两部分。光学系统中,三个激光器使用准直镜输出平行光照射路面,其中1 310 nm和1 430 nm为探测波长,685 nm为可见光指示波长;反射光经直径为2英寸(5.08 cm)双胶合接收镜聚焦后,利用1 270 nm高通滤光片减弱环境光干扰,再通过3 mm直径InGaAs光电探测器转换为电信号;远距离红外热释传感器用于测量路面温度。电路部分主要包括激光驱动、信号调理和信号采集3个模块。其中,激光驱动使用专用恒流驱动芯片对发射光束加载频率1 kHz、占空比50%的方波调制信号,并使平均功率稳定在6 mW;信号调理电路对光电信号进行电流/电压(I/V)转换,并使用数字锁相放大器对接收信号进行解调,有效抑制外部干扰;最后由16 bit ADC将路面反射光强数字化,并和路面温度数据一同通过以太网传输到上位机进行路面气象解算。
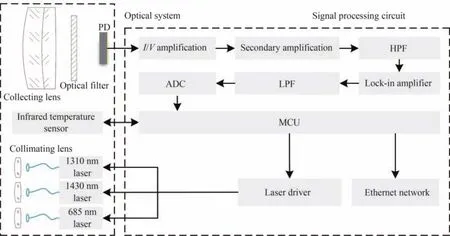
图2 路面气象传感器系统框架Fig.2 Framework of road meteorology sensor system
2 实验与分析
2.1 实验条件
实验系统如图3和4所示。传感器使用三脚架支撑,测量距离为1.5~5 m,角度调节范围为35°~55°;高度尺用于测量积水以及结冰厚度,测量精度达到0.01 mm;路面结冰使用大功率半导体制冷器(Thermoelectric Cooler,TEC)降温实现。

图3 实验系统图Fig.3 Experimental system diagram

图4 传感器实物图Fig.4 Picture of sensor
实验测试路面选用柏油和石材两种比较常见且吸水性不同的材质进行测试,如图5所示,以测试该方法的传感性能。

图5 实验路面Fig.5 Experimental road
2.2 路面气象状态检测实验
路面气象状态检测是对R1430和路面温度进行阈值判别实现的。R1430对水膜、覆冰十分敏感,将其特征与不同状态下的路面温度差异结合,可实现十分准确的状态判别。实验中,分别在柏油、石材路面下以35°、45°、55°三种角度各检测10组数据,探测器架设的垂直高度为2 m。每组数据均包含干燥、潮湿、积水、结冰以及结霜5种路面气象状态,水/冰厚度在3 mm范围内随机分布,结果如图6、7所示。

图6 不同角度下柏油路面气象状态测量数据Fig.6 Meteorological state measurement data of asphalt road under different angles

图7 不同角度下石材路面气象状态测量数据Fig.7 Meteorological state measurement data of stone road under different angles
由测量数据可知,利用R1430可分辨当前路面是否干燥。但“积水与结冰”、“潮湿与结霜”状态下由于R1430差异较小无法判别。常理可知,这4种状态下路面温度明显不同,结合非接触红外热释测温,设置如表1所示的判别阈值,则能实现这5种气象状态的准确判别。

表1 路面状态判断逻辑Table 1 Road state judgment logic
2.3 积水厚度测量实验
积水厚度测量实验中,首先需要对c1、c2参数进行标定。保持传感器垂直高度为2 m,以35°、45°、55°三个角度测量两种路面在不同积水厚度下的R1310和R1430。设置水厚增加步进为0.5 mm,量程为3 mm,得到1 310 nm波长下的反射率数据集,如图8所示。设定水膜厚度为1 mm以下,得到1 430 nm波长下的近零点反射率数据,如图9所示。基于式(3)对R1310数据集进行函数拟合,求得对应的c1、c2预测值。从图中可知,参数c1随角度和的变化并不明显,可将其视为常数,取均值为-2.720 1;c2与角度相关性也较小,但路面材质对其影响较大,需要分别设置标定值。

图8 R1310随积水厚度变化的实验数据集Fig.8 Experimental data set of the variation of R1310 with the seeper thickness

图9 R1 430随积水厚度变化的实验数据集Fig.9 Experimental data set of the variation of R1 430 with the seeper thickness
如式(5)所述,当c1已知时,c2可通过测量积水零点R0实现标定。从图9可知,水膜厚度在0.1 mm附近时,由于受到水膜吸收和后向漫反射减弱的共同影响,R1430出现了阶跃跳变。设置敏感域为[0.18, 0.20],当R1430测值进入该区域时,同步记录R0=R1310,即可完成c2自动标定。
改变传感器高度为3 m,以产生不同的光强数据,然后对积水路面进行再次测试,并设置c1取值不变,c2采用自动标定法获取,结果如图10所示。可见,随入射角由小到大,柏油路面下的最大误差依次为0.2 mm、0.15 mm和0.12 mm;石材路面最大误差分别为0.19 mm、0.19 mm和0.07 mm。由朗伯余弦定律,式(2)中的信号干扰项Ir′将随激光入射角度增大而减小,从而使测量误差降低,这与实验误差相符。但需注意的是,根据菲涅尔方程[16],当θ>60°后,由于水的镜面反射增强,透射率急剧减小,Ir也将明显减弱,受传感器灵敏度的限制,此时的测量误差会再次增大。
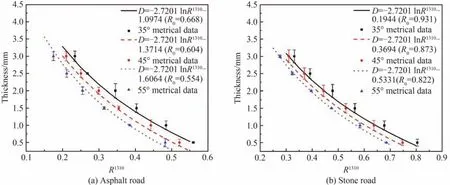
图10 积水厚度测量的误差分析Fig.10 Error analysis of thickness measurement of seeper
2.4 结冰厚度测量实验
冰厚测量实验方案与积水测量类似,但由于结冰厚度难以准确控制,采用在3 mm量程随机制冰并获取相应的R1310,再由高度尺测量结冰厚度,得到结冰路面下的c1标定数据集,如图11所示。使用式(3)拟合标定得c1的均值为-3.299 5。
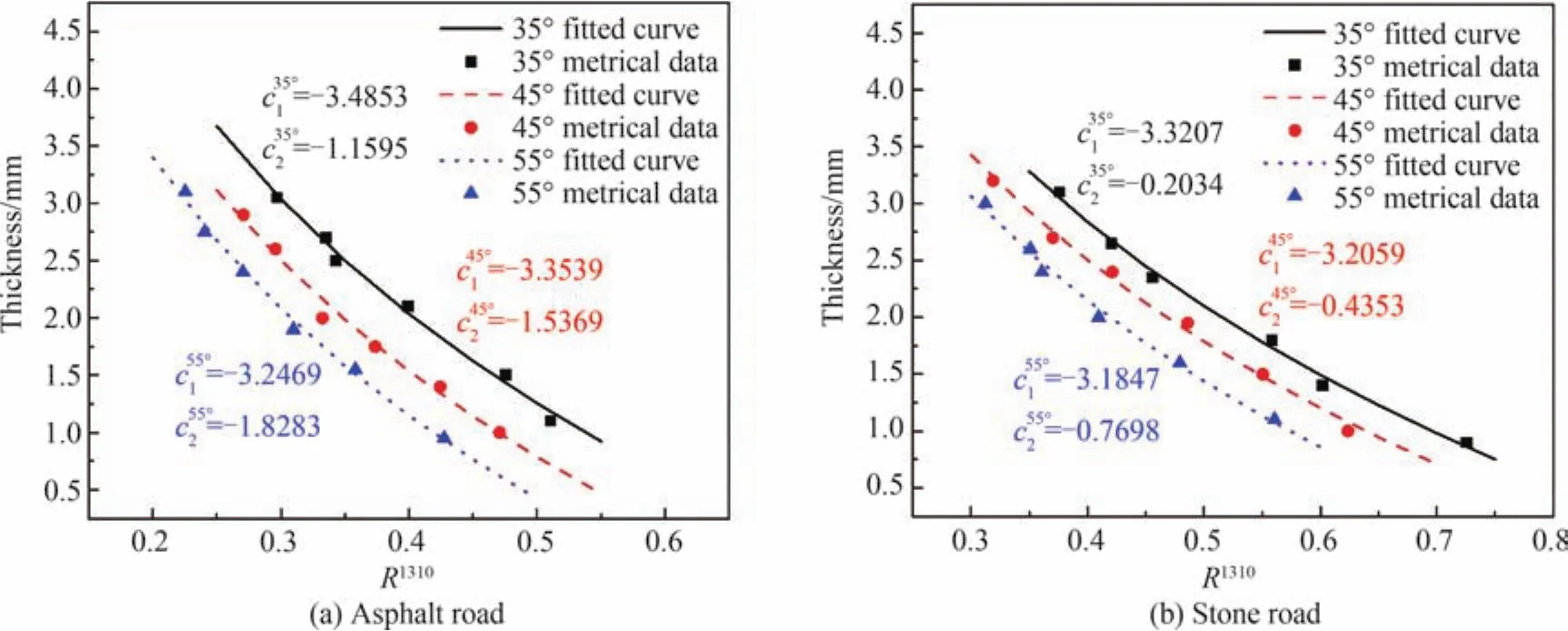
图11 R1 310随结冰厚度变化的实验数据集Fig.11 Experimental data set of the variation of R1 310 with the ice thickness
结冰状态下c2的自动标定也需要测量R0。但实验中对积水零点路面进行降温结冰时发现R1430的测值极不稳定,如表2、表3所示,将引起c2标定出现偏差。这是由于结冰后来自冰面的反射光Ir′增强,而Ir1430较弱,干扰了R1430测量。并且,实际路面也难以出现结冰临界状态。

表2 柏油路面积水、结冰零点的反射率对比Table 2 Comparison of the zero-thickness reflectivity between seeper and ice in asphalt road

表3 石材路面积水、结冰零点的反射率对比Table 3 Comparison of the zero-thickness reflectivity between seeper and ice in stone road
从表 2、表 3 中可知,由于R1310≫R1430,结冰后Ir′增大对R1310影响较小,可认为结冰前后R0基本不变。基于此,考虑在相同路面下,且测量距离和角度不变时,使用积水时的R0测值对结冰c2进行标定。
再次将传感器高度由2 m调整为3 m,使用本方法测量不同冰厚,并进行误差统计,结果如图12所示。在35°、45°、55°入射角下,柏油路面最大测量误差分别为0.17 mm、0.13 mm、0.12 mm,石材路面误差分别为0.18 mm、0.15 mm、0.14 mm。
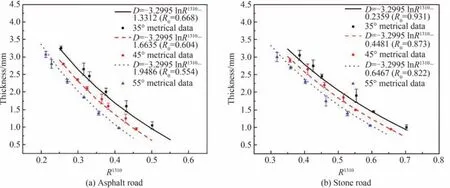
图12 结冰厚度测量的误差分析Fig.12 Error analysis of thickness measurement of ice
通过上述实验证明,在积水和结冰气象状态下,使用反射率零点标定测量方法,传感器可在3 mm量程内实现小于0.2 mm的测量误差,精度良好。
3 结论
本文主要研究一种基于双波长激光探测的非接触式路面气象传感方法,通过测量特征波长下的路面反射率,并结合红外温度检测,可实现多种路面状态的可靠识别,以及积水、结冰厚度的准确测量;通过对积水零点的自动判别实现解算模型的参数标定,解决其他方法通常需要人工现场标定的难题,提升了测量装置的易用性。实验证明,该方法的积水、结冰测量精度达到±0.2 mm,量程达到3 mm,达到与国外先进设备相似的测量能力,具有较好的实用价值。