基于蓝光外腔半导体激光器的水下调频连续波激光测距
2023-07-12马超峰姜琦吴映梁伟
马超峰 ,姜琦 ,吴映 ,梁伟 ,3
(1 中国科学技术大学 纳米技术与纳米仿生学院,合肥 230026)
(2 中国科学院苏州纳米技术与纳米仿生研究所,苏州 215123)
(3 安徽大学 光电信息获取与控制教育部重点实验室, 合肥 230601)
0 引言
近年来,自主式水下机器人(Autonomous Underwater Vehicle, AUV)已成为海洋探索及水下作业的重要手段,一种低功耗、轻量化的水下激光测距系统对小型AUV环境感知有着重要的意义[1-4]。现有的水下激光雷达大多是基于脉冲飞行时间(Time Of Flight, TOF)[5-6]进行测距,典型的脉冲长度12 ns,峰值功率约为333 kW,探测距离约26 m,测距精度小于0.6 m。但是其体积庞大,功耗较高,通常使用飞机、船舰等作为负载平台[7-8],不适合AUV等小型平台的应用。此外,基于TOF的激光雷达之间也会存在干扰。后向散射也是水下脉冲激光雷达面临的一个巨大挑战[9-10],后向散射降低了测距的对比度和分辨率,强烈的后向散射会极大的限制探测系统的动态范围,甚至淹没目标信号导致检测到虚假的目标[9]。常用的抑制水下后向散射的方法有距离选通技术[11]和同步扫描技术[12],但是上述两种方法存在一定的距离死区,且测量速度非常慢。目前,针对自动驾驶应用的近红外波长激光调频连续波(Frequency Modulated Continuous Wave, FMCW)激光雷达[13-15]已日渐成熟,然而,至今还鲜有关于水下调频连续波激光雷达的研究报道。水下调频连续波激光雷达具有比TOF雷达更大的动态范围,可以输出与距离成比例的连续的频谱信号。FMCW激光雷达的距离分辨率只与激光器的调频范围有关,因此可以用较低带宽的探测器达到较高的距离分辨率[14]。此外,由于相干探测的本振光对输出的放大作用,相干探测的灵敏度非常高,因此FMCW激光雷达对激光器输出功率要求相对较低,可以使用体积小功耗低的半导体激光器实现,非常适合对尺寸、重量、功耗等要求非常高的应用。
单纵模窄线宽可调频激光器是调频连续波激光雷达的前提,由于水对光的吸收损耗[16-17]会导致信号衰减从而缩短探测距离,因此需选用位于海水“透射窗口”[1]、衰减系数较小的蓝绿激光。由于蓝光波长较短,所需的分布反馈周期很小,近红外波长常见的DFB单频窄线宽激光器所需的半导体刻蚀工艺在蓝绿波长极难实现,目前还没有商业化的蓝绿波长DFB激光产品。有研究人员尝试在DFB结构中埋入相移光栅,实现了波长450 nm的单模激光输出[18]。该激光器线宽约3 GHz,相干长度不足0.1 m,无法满足数米以上的FMCW测距需求。有学者利用钛宝石激光器腔内倍频技术实现455.5 nm激光输出,线宽1.8 MHz,连续扫频范围3.4 GHz[19]。该激光器虽然可以满足FMCW水下测距的性能要求,但是其结构复杂,体积庞大且稳定性较低。本文采用商用405 nm蓝光FP激光二极管组成外腔半导体激光器(External-Cavity Diode Laser, ECDL),相干长度大于10 m,在1 kHz扫频周期下可实现无跳模连续扫频范围1.5 GHz。使用该ECDL激光,搭建了调频连续波测距装置,进行水下测距实验,测距频率1 kHz, 平均测量偏差小于0.051 m。
1 基本原理
1.1 调频连续波测距原理
调频连续波激光测距的基本原理如图1(a)所示,信号发生器产生三角波调制信号,通过改变注入电流对激光进行频率调制。光源发出的调制激光经过分束器(Beam Splitter, BS)分为两部分,一部分作为探测信号发射到目标物体上,另一部分作为本振光与反射回来的光发生干涉,混频后得到两信号的拍频信号,此拍频信号的频率包含着目标距离和速度等信息。因此,将拍频信号进行快速傅里叶变换(Fast Fourier Transform, FFT)等相关处理,即可计算出目标距离等信息[13]。

图1 调频连续波激光测距原理示意图Fig.1 Schematic diagram and principle of FMCW signal analysis
图1(b)中实线为本振光信号的角频率波形,虚线为回波信号的角频率波形,点划线为混频生成的拍频信号的角频率波形。采用三角波调制信号,其周期为2Tm,在上升阶段,本振光信号的角频率为[13]
式中,ω0为起始频率,B为三角波的调频范围,α为三角波调制斜率。当两束光发生干涉时,得到的混频信号强度可表示为[13]
式中,I0和V分别是拍频信号的平均强度和对比度。τ是调频光从BS输出到待测点再返回的传播时间,为
式中,n为传播介质的折射率,c为自由空间中的光速。从而可以得到拍频信号的角频率为
在频率调制的上升段和下降段,其拍频频率绝对值是相等的且都为ωb,因此可以得到目标距离为[14]
FMCW激光测距的距离分辨率为[14]
由式(6)可知,在调频范围B和周期Tm一定的条件下,拍频信号的频率与距离成正比,测量拍频信号的频率即可计算出距离l,同时从式(6)可以看出FMCW激光测距的距离分辨率只取决于调频范围,因此理论上,提高激光光源的调频范围B可以提高理论测距分辨率。
1.2 重采样
FMCW激光雷达测距对激光的调频线性度有着很高的要求。在实际应用中,激光器的频率通常并不是随调制信号线性变化的[20],直接测量拍频信号的频率也不是恒定值,这会导致FFT后的信号频谱展宽,降低测距的信噪比以及测量精度。因此需要解决调制非线性带来的影响,并调控中心波长使线性扫频范围尽可能宽。
这个问题可以通过在频域对干涉信号瞬时等光频间隔采样[21],而非等时间间隔采样来避免。通常使用方法是通过一个辅助的马赫-曾德尔干涉仪监控频率随时间的变化,其延时光纤的长度必须保持不变,并且延迟光程差至少大于主干涉仪光程差的2倍。两个干涉仪拍频信号由ADC同步采样,将辅助干涉仪信号的每个峰值和谷底的时间点作为触发,对主干涉仪的拍频信号进行重新采样。由于调制非线性对两个干涉仪的影响是相同的,重采样的信号中不包含非线性的相位噪声,因此可以很大程度上消除非线性频率扫描引起的误差,文献[21]对重采样的原理及对分辨率的影响做出了详细分析。
提取辅助干涉仪拍频信号的峰谷值位置点,其光频间隔为Δω=π/τr,其中τr为辅助干涉仪的光纤延时。由于τr为恒定值,峰谷值点之间的光频间隔不变。重采样得到的拍频信号可表示为[21]
式中,Im0、Vm分别为主测量干涉仪拍频信号的平均强度和对比度,τm为主测量干涉仪的传播时间。实际情况中式(2)的α包含随时间变化的非线性项,导致拍频信号频谱展宽,而重采样后的拍频信号为理想的余弦采样函数,其中不包含调制非线性的部分,因此重采样技术可以优化干涉信号的频谱展宽,提高测距精度。对其进行FFT运算获取其频谱,代入式(3)、(4)可得待测目标距离为
其中,n1为延时光纤折射率,n2为传播介质折射率,L为延时光纤长度,N为采样点总数,P为频谱峰值点数位置。
2 实验装置
2.1 蓝光单模可调光源
调频连续波激光雷达的精度、分辨率和测量范围等性能与光源的参数密切相关。根据FMCW激光测距原理,激光器的相干长度必须大于测距范围的两倍[22];并且激光器的调频范围越大,距离分辨率越小。单纵模无跳模窄线宽激光输出是实现调频连续波测距的前提。
如图2所示,本文采用一种最为简单的外腔半导体激光结构[24-25],该外腔半导体激光器由半导体激光、准直透镜、30%反射镜以及隔离器组成,相较Ti宝石激光器[19]具有结构简单、体积小等优点,其中光源使用中心波长405 nm的商用FP多纵模半导体激光二极管,纵模间隔约50 pm,发光功率可达20 mW以上。激光二极管输出的光束经准直透镜发射到反射镜上,30%的反射光沿入射光路反馈回激光二极管。激光二极管原有的多纵模,在外腔反馈时具有不同的反馈相位,从而形成不同的相干反馈增益并进而产生单频输出,此外由于外腔显著增加了激光的等效腔长和品质因子,激光的线宽也得到了压窄。实验中发现,要获得单模激光输出需要选取合适的反射率,反射率太低会导致反馈光太弱,无法形成有效的外腔反馈选模;反射率太高会降低激光器的出光效率,同时对激光二极管也会有一定的损害。另外,激光的线宽和调频范围与外腔的腔长有关,因此需要合理地调节反射镜的位置以满足线宽与调频范围需求[25]。

图2 蓝光外腔半导体激光器Fig.2 Blue light external cavity semiconductor laser
图3所示为固定注入电流下,有无外腔反馈的激光光谱及扫频干涉信号对比,图3(a)中蓝色线为未加反射镜的FP光源输出光谱,当调节30%反射镜垂直于出光光路形成外腔反馈后,由于外腔反馈对激光器具有选模和压缩线宽的作用[24],并且通过位移反射镜选取合适的反馈相位,可形成如橙色线所示的单纵模单频激光输出,中心波长408 nm。本实验采用10 m延时光纤搭建光纤干涉仪,图3(b)展示了对激光注入电流进行三角波调制时,在加反射镜形成外腔前后的干涉信号对比。其中蓝色线为未加反射镜的FP光源调频输出的干涉信号,由于此时的输出为多模激光,激光总有效相干长度较短无法形成高对比度的干涉信号。橙色线为有反射镜时的激光调频干涉信号,可以看出单模激光可以形成高对比度的干涉现象,说明外腔半导体激光器的相干长度远大于10 m光纤光程,对应的激光线宽约为或优于MHz量级[22],因此其测距性能优于已报道的DFB激光器[18]。

图3 蓝光FP激光在有和无外腔反馈时的光谱和干涉仪信号对比Fig.3 Comparison of the optical spectrum and the interference signal of the diode laser with and without external feedback
2.2 测距装置
本文所设计的基于调频连续波激光测距的系统框架如图4所示。实验系统主要包括:光学测量系统、数据处理电路、水下测试环境。其中光学系统部分由单模可调谐的激光光源、用于测距的空间光干涉仪以及用于重采样的辅助光纤干涉仪组成。

图4 测距系统原理图Fig.4 Schematic diagram of ranging system
实验光学测量系统如图4(a)所示,通过信号发生器产生1 kHz的三角波调制信号对光源的注入电流进行调制,使用辅助干涉仪测量激光无跳模连续调频范围约1.5 GHz。输出的激光经过BS分成两束,90%进入测量干涉系统,另一路进入辅助干涉系统。测量干涉仪系统中,激光经过偏振分束器(Polarization Beam Splitter, PBS)分成96∶4两路,4%一路发射到反射镜上作为干涉仪的本振光;96%一路经过自由空间发射到被测目标上,输出光功率9.5 mW,假设目标不改变入射光偏振方向,本振光路和探测光路的1/4波片可使得反射的本振和探测光信号在PBS1分别透过和反射形成合束。本振光和信号光经过光轴夹角22.5°的1/2波片及PBS2后分别分为偏振正交的两束光,相位相差180°,分别进入光电探测器(Photodetector, PD)形成平衡探测[23]。由于PD1和PD2的信号相位相差180°,通过平衡探测器中的差分放大电路后共模部分抑制相消,差模部分放大,因此采用平衡探测可有效抑制拍频信号中的直流分量提取交流分量,从而将干涉信号放大。辅助干涉仪系统中,激光经50∶50光纤耦合器(Optical Coupler, OC)分为两束,其中一束经过10 m延时光纤后与另一束混频,产生的混频信号由光电探测器输出。数据处理电路部分主要以FPGA作为控制,通过ADC将测量干涉系统中的探测信号与辅助干涉系统中的探测信号同步采集,通过以太网发送到上位机进行信号的重采样与傅里叶频谱分析。
实验水下测试环境如图4(b)所示,通过在2 m长水箱中添加Mg(OH)2粉末调节水的混浊度,得到了衰减系数1.2 m-1[17]的水下测试环境,水的折射率约为1.33[3]。测距系统为同轴系统,水箱入光口选用直径10 mm透射率99%的光学窗口平面,水箱两端放置反射镜通过多次反射延长实验测试距离,在不同位置放置反射率95%的反射镜作为探测目标物,模拟海水环境进行水下测距。
3 实验结果与分析
实验中,先直接对探测到的拍频电压信号进行傅里叶变换,以对数坐标展示其频谱功率的相对大小,由于目标距离与干涉信号的频率成正比,可通过式(5)将FFT频谱转换为距离坐标,直观体现拍频信号与测量距离的分布关系,得到的频谱如图5(a)所示。由于激光器频率调制非线性的影响,可以看出拍频信号频谱发生了严重展宽,此时目标距离的测量精度非常差[21],信噪比也下降。图5(b)展示了采用辅助干涉仪对拍频信号等频率间隔重采样后的傅里叶频谱,可以明显看出拍频信号的展宽得到了很好的修正,信噪比也有了显著提高,可以更精确地检测出频谱峰值的频率,从而准确获得目标物体的距离信息。实验验证了等频率间隔重采样对调制非线性影响的抑制具有显著的效果。

图5 重采样前后FFT频谱对比Fig.5 FFT spectrum comparison before and after resampling
利用重采样技术对不同位置目标进行测距实验,将目标物在水下逐次移动0.5 m进行距离探测。图6所示为不同位置探测目标的干涉信号傅里叶频谱,从图中可以看出在不同的探测距离下回波信号均有大于10 dB的信噪比。随着探测距离的增加,干涉信号的强度和信噪比逐渐降低,测距误差也会随之增加,系统的最大可验证探测距离约为5 m,此时拍频信号频率约为580 kHz,信噪比约为15 dB。

图6 FMCW测距结果Fig.6 FMCW ranging results
实验在绝对距离1.5 m~5 m的范围内逐点测量5次取平均值,得到的测量距离分别为1.524 m、2.009 m、2.551 m、3.024 m、3.469 m、4.039 m、4.550 m和5.023 m。从图7中可以看出目标测量距离与实际距离呈良好的线性关系,在不同的测量距离下最大拟合偏差为0.051 m。

图7 实际距离与测量距离关系Fig.7 Relationship between actual distance and measured distance
理论上FMCW激光测距的距离分辨率只取决于调频范围,从式(6)可计算得到距离分辨率为0.075 m。实际测量中,重采样过程会减少采样点数,从而降低FFT频谱分析的精度;同时待测目标物体的位置由钢卷尺测量得到,也会引入<1 cm的测量误差。图8展示了3 m距离下的十组测量结果,其中最大测量误差为0.08 m,计算得到平均误差为0.027 m,均低于FMCW理论距离分辨率。
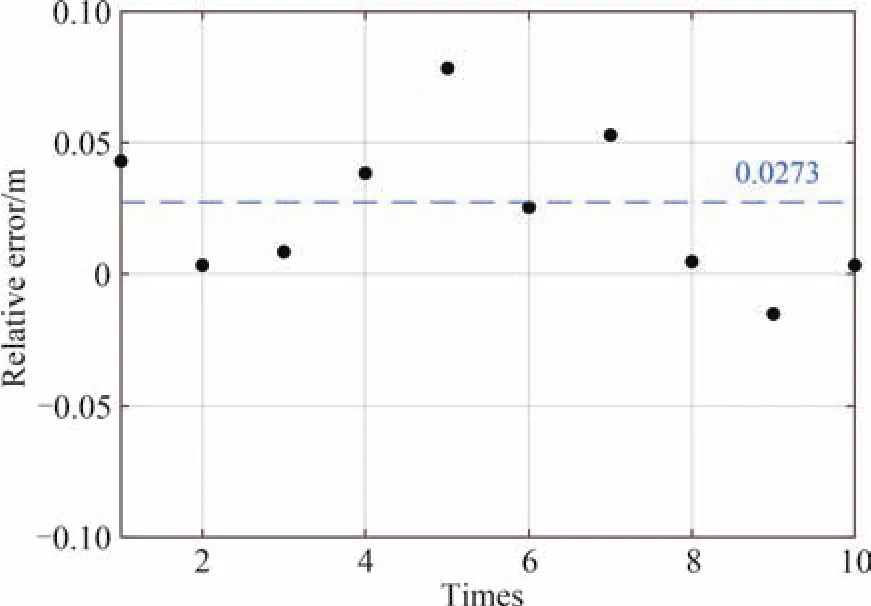
图8 距离测量误差Fig.8 Distance measurement error
4 结论
本文提出并实现了基于调频连续波原理的水下蓝光激光测距。采用自行设计组装的可调谐外腔半导体激光器,实现了波长408 nm无跳模连续扫频范围1.5 GHz,相干长度大于10 m光纤的蓝光激光输出。相较于其他结构外腔蓝光激光[24-25]具有结构简单、体积小等优点。实验搭建调频连续波激光测距系统,在1.2 m-1衰减系数的水下对从1.5到5米间的反射目标进行了测距实验,最大测量偏差0.051 m,测量信号信噪比>10 dB。实验证明水下蓝光调频连续波激光测距系统具符合理论预期的高分辨率的测距性能,并具有低功率、体积小、成本低等优点。为水下作业的小型无人机平台提供一种低功耗、轻量化的环境感知测距方案。
