天基光学成像系统像移研究及补偿技术发展现状及趋势(特邀)
2023-07-12郝伟闫佩佩李治国程志远折文集
郝伟 ,闫佩佩 ,李治国 ,程志远 ,折文集
(1 中国科学院西安光学精密机械研究所,西安 710119)
(2 中国科学院空间精密测量技术重点实验室,西安 710119)
0 引言
随着科学技术的发展,相机已经走进每一个人的生活,尤其是智能手机的出现,让我们可以随手拍摄周围的美景,使得获取一张清晰的图像变得唾手可得。而这仅仅是对近距离静态或慢速目标而言,由于距离近、目标光学特征明显、信噪比高,所以容易获取清晰的图像。如果目标出现在几十公里乃至几百公里处,那就必须采用长焦距高分辨率相机来进行拍摄成像,相机分辨率越高,对应的每个像元的角分辨率越小,对于防抖稳像要求也就越高,这时想获得一张清晰的图像就会变得非常困难。如果此时目标还在高速运动,要想获取清晰的图像就更是难上加难,不但调光、调焦要准确到位,特别是在快速跟踪过程中,还要将动态像移控制到较小的范围内。如何保证对高速空间目标动态高清晰成像就成为当今航天领域的一大技术难题。
近年来我国空间光学技术不断突破,高分辨率载荷已成为我国对地遥感观测、空间目标观测、天文观测等领域的主要力量[1-2]。为了看清远处的场景和目标,卫星光学载荷一般为长焦距高分辨率相机,需要采用稳定指向技术将目标保持在视场内进行成像。而对于高速运动的目标,要想对其进行远距离清晰成像,既要保持稳定指向,又要消除跟踪过程中由于控制误差和平台本身的震动等因素带来的动态像移的影响。对动态像移约束为:当在积分时间内,像移>0.3像元时[3],呈现在探测器靶面上的图像可能会拖尾,甚至模糊不清,大大影响成像质量,若是点目标探测,则会影响提取定位精度,若是面目标成像,则会影响清晰度,降低分辨率。
天基平台的用途不同,光学系统的结构形式以及所用探测器的类型也各不相同,像移产生的主要影响因素及补偿方式也会不同。目前,天基光学成像从用途上可以分为对地遥感、空间天文探测、火星探测以及空间目标探测成像等四个方面。无论哪种用途,天基平台对成像质量的要求都越来越高,因此对像移补偿的要求也越来越高。本文按照天基平台的用途,主要综述四种不同的天基成像技术在像移影响因素及补偿方式方面的国内外发展现状,结合笔者的理解,给出像移研究发展方向的预测,可推动天基光学成像领域的总体发展。
1 天基成像光学系统像移概述
1.1 天基对地遥感成像像移概述
近年来,天基对地遥感技术不断发展,搭载的光学载荷分辨率已经突破0.1 m。由于对地分辨率的提高,像移产生的影响成为高分辨率对地遥感图像的重要因素,图1给出了像移对遥感图像的影响对比图。左图为无像移图像,右图为有像移图像,可以看出,像移的存在严重影响了图像的清晰程度。因此为了保证此类光学系统获取图像的成像质量,需要精确补偿像移速度,这就需要分析得到相应的计算矢模型。分辨率提高,相应的补偿精度要求也会随之提高。举例说明:2009年,美国发射了Worldview-2商业对地成像卫星,其对地分辨率可到0.46 m,该卫星采用敏捷成像方式,侧摆范围从-45°~+-45°,沿轨推扫宽度可到250 km,图2为Worldview-2拍摄的日本地震核泄漏的福岛核电站,可以看出图像质量很高。

图1 像移对遥感图像的影响Fig. 1 The influence of image motion on space remote sensing image

图2 Worldview-2拍摄的日本福岛核电站Fig.2 Worldview-2 image of the Fukushima Daiichi nuclear power plant
2014年8月,美国发射了Worldview-3商业对地成像卫星,其特点是多负载、高光谱和高对地分辨率,星下点分辨率比Worldview-2还高,可到0.31 m(全色),图3为Worldview-3拍摄的迪拜(Dubai)哈利法塔的彩色图像(地面分辨率计算约0.4 m),从图中可以清楚的看到网球场上方灯具的影子。由此可推断,无论是Worldview-2还是Worldview-3,都采用了非常先进的像移补偿手段。然而,由于对地成像领域的特殊性,国外发达国家,特别是美国,对该类技术几乎没有公开发表的文献资料[4]。

图3 Worldview-3拍摄的迪拜哈利法塔Fig.3 Worldview-3 image of the Burj Khalifa in Duba
1.2 空间天文探测像移概述
随着天文学和科学技术的发展,空间天文望远镜的焦距越来越长,角分辨率越来越高,例如:2021年底,为期近41年詹姆斯韦布空间望远镜(James Webb Space Telescope,JWST)成功发射,其焦距为131.4 m,像元 角 分 辨 率 为 0.068″[5]。 下 一 代 太 空 望 远 镜 ATLAST(Advanced Technology Large Aperture Space Telescope)的主镜口径预计为8 m到16 m,其角分辨率预计将是JWST的5~10倍。角分辨率越高,对光轴指向的稳定度就越高。然而,空间环境复杂,轨道运动和姿态变化多样,此外,帆板等运动部件的振动等,都会影响望远镜光轴的稳定指向,导致图像模糊,严重影响成像质量。因此,越来越高的天文探测需求下,对空间望远镜像移的控制也产生了更高的要求[6-7]。
1.3 火星探测像移概述
一般的航天器其轨道多为常规的近圆轨道,而火星探测器由于其应用的特殊性,需要运行在大椭圆轨道,轨道的变化导致以往适用于近圆轨道的像移补偿模型不再适用于大椭圆轨道,如何针对火星探测光学系统,分析像移影响及补偿技术,成为火星探测器研究的难题之一[8]。
1.4 天基空间目标成像像移概述
天基载荷对空间目标成像过程中,由于距离相比地基成像要近很多,目标相对运动速度较快,除了卫星姿态、平台振动产生的影响外,还要考虑跟踪过程中由于控制误差和速度稳定性等因素带来的动态像移的影响。天基空间目标光学成像系统为了获取更加清晰的目标图像,对载荷的空间分辨率要求也越来越高,对空间运动目标的运动适应范围要求越来越宽,如何抑制动态像移的影响逐渐成为获取高分辨率清晰图像的瓶颈。图4为像移对天基空间目标成像的影响对比,图4(a)为无像移图像,图4(b)为有像移图像,对比可见,像移大大降低了图像的清晰程度。

图4 像移对天基空间目标成像的影响Fig. 4 The influence of image motion on space target for space-based imaging
基于以上分析可以看出,天基平台在轨工作中,受卫星轨道变化、姿态角变化等因素的影响,以及跟踪速度误差、平台及各运动部件颤振的影响,不可避免的会产生像移。像移会导致图像分辨率降低,图像模糊,严重影响各类相机的成像效果,因此世界各国学者针对天基平台各种空间相机的像移机理及补偿技术也开展了一系列研究。但已有的研究基本都是从单独的领域去分析,没有系统全面的将天基平台像移的影响及补偿进行综合呈现。本文在简述像移影响机理及像移补偿技术的基础上,对天基成像按照用途分类,详细介绍近年来国内外在对地遥感、空间天文探测、火星探测和空间目标探测成像领域像移影响及补偿的研究进展,期望通过对国内外研究现状的跟踪分析,进一步提升对我国空间光学技术发展方向的理解,为我国航天光学技术和装备的发展提供指导。
2 像移影响机理
像移的产生会引起两方面影响,一是图像模糊,二是几何变形,其原理如图5所示。可以看出,正常的点物经过光学系统成像,由于光学系统不是理想光学系统,存在像差等影响,点物不再成点像,而是有一定直径的像斑,称为弥散斑。弥散斑中心由点物经过光学系统的几何成像确定,其归一化的能量分布称为扩散函数。若系统存在像移,则像点的位置会变化,扩散函数中心位置随之改变。曝光时间内,对每个时刻的扩散函数叠加,然后对结果进行归一化,就得到了弥散斑的扩散函数。可见,像移会使弥散斑直径增大,中心能量降低,成像清晰度下降;若有像移且像移不规则时,弥散斑的位置也可能发生变化,导致图像产生几何变形。
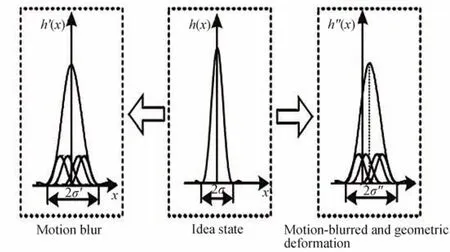
图5 模糊与几何变形Fig.5 Mechanism of motion blur and geometric deformation
能量分布用数学形式表达为:若无像移,扩散函数用h(x)表示,若有像移,则h(x)移动,像移用ε(t)表示,t时刻能量分布可用式(1)表示为
式中,δ(x)是Dirac函数;*表示卷积。
曝光时间内归一化能量分布表示为
式中,t0是起始曝光时间;te是曝光时间。
若为理想系统,考虑一维情况,δ(x)即为线扩散函数。
受振动影响,各时刻像均在运动,这里用ε(t)表示像移,则t时刻的线扩散函数为δ(x-ε(t))。最终结果是曝光时间,所有时刻的能量相加,即有
由像移引起的线扩散函数用LSFvib(x)表示。则整个系统的线扩散函数应为像移引起的线扩散函数LSFvib(x)与其它因素产生的线扩散函数的卷积,用式(4)表示为
一般,卷积宽度为两个参与卷积函数的宽度相加,LSFvib(x)有一定的宽度,与h(x)卷积会使x方向宽度增加,即弥散斑直径增大。若LSFvib(x)或不对称,或其中心位置与h(x)不重合,(这是因为h(x)一般情况下是对称函数),则LSF(x)位置会改变,即图像有几何变形。
利用图像的扩散函数等价于在曝光时间内运动函数的概率密度函数(连续)或直方图(离散)这一思路,对LSF作傅里叶变换得光学传递函数(Optical Transfer Function,OTF),OTF为复数,可以写成
式中,MTF表示光学传递函数的模量,即光学系统的调制传递函数;PTF表示光学传递函数辐角,即相位传递函数。
大多数情况下,PTF表现成像的不对称性,若有视轴扰动,则主要是点扩散函数PSF中心位置相对原点的偏移,在图像上就表现为变形,除了成像的位移外,MTF下降会更直观的反映。对于空间相机而言,MTF是空间频率的函数,它表征空间相机对目标对比度的传输能力(与空间频率对应)。因此, MTF是空间相机的重要指标。
MTF具有可传递性,多个系统串联导致的最终MTF为各系统MTF之积。基于前面的分析,像移的影响会更直接的反映在空间相机在轨的MTF下降,因此可以通过分析像移对MTF的影响,直观体现像移对空间相机像质的影响,基于以上理论基础,在研究像移对成像的影响时,国内外学者普遍采用动态MTF作为评价指标。
3 像移补偿技术研究现状
基于像移影响机理可以看出,像移的产生会使系统的MTF下降,严重影响图像质量。因此,在实际的工程应用中,必须考虑像移补偿技术,用以减小像移对像质的影响。在曝光时使探测器的移动速度和方向与物体在探测器上所成的像的移动速度和方向匹配就能实现像移补偿。但是,在曝光时使探测器进行移动存在一定的困难,需要使用其它方法实现这种相对运动,达到补偿像移的目的。
目前常用的像移补偿方法包括光学像移补偿、机械像移补偿、电子像移补偿和图像式像移补偿[9]。
光学像移补偿顾名思义,即通过移动光路中的光学元件实现像移补偿。一般可移动的元件包括:反射镜、棱镜或透镜等。这种补偿方式原理简单,且工程实现容易,在20世纪80年代初,美国在其航空相机上就进行了应用,达到了补偿效果。但一般用于像移补偿的反射镜或棱镜惯量较大,用这种方法进行像移补偿的精度、带宽都较低,限制了使用范围。
机械像移补偿通过控制焦平面运动实现像移补偿。通过解算像移速度,控制焦平面运动,消除像移。一开始,这种方法也受限于焦平面的控制,像移补偿精度和带宽较低。为了提高精度和带宽,国内及国外都有学者提出,采用压电陶瓷直接驱动焦平面组件,从而对前向像移进行一维补偿。对于二维补偿,国外学者提出,可采用二维压电陶瓷驱动焦平面移动。采用这种驱动方式可使补偿精度和带宽大大提高,但由于压电陶瓷行程小(压电陶瓷单元片最大形变量<1 μm,一般在实际使用时采用叠堆式结构,叠加输出位移,最终最多只有几十μm量级),这种方法不适用于动态凝视扫描成像系统。此外,该补偿方法不能对快速运动目标和大视场系统进行像移补偿,更适用于载机姿态变化和平台扫描运动导致的像移。
电子式像移补偿通过控制探测器的电荷转移速度等于像移速度从而实现像移补偿。这种方法主要用于使用线阵探测器TDI CCD的系统中。该方法在美国CA-260、CA-270、CA-290等型号的相机上成功应用,对于广域成像,由于探测器为大面阵,读出电荷时间长、帧频低,则无法使用这种方式进行快速运动目标的像移补偿,因此电子式像移补偿应用范围较小[10]。
图像式像移补偿通过建立像移退化数学模型,在此基础上进行图像复原,属于被动式像移补偿手段。这种方式受限于芯片计算能力,实时性较差。
以美国为代表的国家由于其在航天方面明显的技术优势,在像移补偿的相关理论研究、数学建模和工程技术等方面都很早起步,特别是美国,较早系统性地开展了包括卫星轨道运动、姿态稳定度、颤振等因素造成的像移及补偿的研究工作,并将补偿系统分为两部分:1)空间相机图像运动补偿(Image Motion Compensation,IMC),补偿卫星轨道运动和姿态变化;2)空间相机扫描镜运动补偿(Mirror Motion Compensation,MMC),补偿在一个行周期的卫星姿态抖动。这两部分的研究都是针对遥感成像系统,IMC的实现是通过设置TDI CCD的行转移周期,MMC的实现是通过控制扫描镜运动[11]。
除了美国外,日本2005年发射的新一代多功能卫星MTSAT上,采用多元并扫过采样方式,利用空间重采样技术在一定程度上解决了像移补偿问题[14]。
韩国从1999年到2013年间,发射了低轨KOMPSAT-1、2、3、5系列对地遥感卫星,此外,2010年开始,韩国开始发射高轨GEO KOMPSAT系列卫星,其第一颗GEO卫星为“通信、海洋、气象卫星”COMS,并宣称已针对COMS卫星开发了一套IMC算法,但还未经过实际应用的验证[14]。
我国在像移补偿方面的研究中起步较晚。此外,随着天基光学系统向远距离、长焦距、高分辨率方向的发展,对成像质量提出了越来越高的要求,这就使得像移补偿技术成为该领域的关键技术。空间应用不断拓展,像移对空间光学成像的影响成为国内外学者的研究热点。然而,由于空间成像的特殊应用,国外这方面的资料很少公开发表,能查到的实际工程应用中采用的像移补偿措施以及相关数学模型的资料很少。而且,基于传统的像移补偿方法,无法满足当前天基光学设备的高成像质量要求,需要寻找新的方法或运动机构来进行高精度像移补偿。
快速反射镜( Fast Steering Mirror,FSM)是一种具有很高响应速度,在光路中控制光束走向的反射镜装置,一般可采用音圈电机或压电陶瓷驱动,具有转动惯量小、定位精度高(μrad或亚μrad级)、带宽高、响应速度快等优点。基于FSM的以上特点,近20年来,随着位置传感器、控制电路、柔性支承和驱动器等技术的进步,越来越多的机构对FSM进行了深入的研究,国外学者开始将FSM应用到高精度像移补偿中,并取得了很好的效果[14]。FSM最先出现在航空载荷像移补偿中。美国Raytheon的“全球鹰”相机,利用FSM的周期性运动代替传统扫描机构的存在启动和停止的问题,且FSM的带宽远远高于传统方式,大大缩短了帧间稳定时间。
FSM除了被应用在航空相机的像移补偿中,也逐渐被用于航天光学载荷的像移补偿工程方案中。1999年加州州立大学研制了一套空间红外光学系统,在处理像移对其成像质量的影响时,在光路中分别设置一个外框架FSM和一个内框架单轴FSM,实现了扫描状态下的凝视成像。1990年,美国研制的高分辨率KH-12侦查卫星,对地分辨率可达10 cm,因此对图像的质量要求很高,对像移补偿技术的要求更高。根据所查资料显示,该系统采用了两种像移补偿方法组合,即“FSM像移补偿+软件像移补偿”结合,实现高质量成像。
国内对FSM的研究相比国外起步晚,但经过十多年的努力,一些高校、研究所在这个领域也取得了一些成果[15]。然而,还未见将FSM应用到天基近距离、快速移动目标成像系统的像移补偿领域的相关研究报道。
基于以上研究可以看出,FSM像移补偿技术虽然属于传统的“光学像移补偿方法”,但由于FSM与传统所用的反射镜在驱动方式、控制方法上都有所不同,因此同样用于像移补偿中,基于FSM的像移补偿策略就具有更明显的优势:定位精度更高、响应速度更快。
虽然国外已有将FSM应用到航天光学载荷的像移补偿工程方案中并取得了较好的补偿效果,且国内也有将FSM用于补偿动基座稳定性引起的像移影响的相关实验室验证,然而要走向成熟的工程方案,还需要在以下方面进一步研究:
1) FSM的性能与机械结构、驱动器、反馈元件等因素有关,还取决于所采用的控制策略。传统的控制理论及方法已无法满足要求,因此需要基于现代控制理论,进一步研究可应用于工程实践的FSM控制方法;
2) 将FSM用于像移补偿,需要有一个评估其补偿性能、可量化的标准。笔者认为可将MTF作为FSM用于像移补偿的评估,比较FSM补偿前后的MTF,这样更加直观高效;
3) 对于高分辨率、有高成像质量要求的光学系统,若一种像移补偿方法无法满足要求,可参考美国KH-12侦查卫星的补偿方式,将多种像移补偿方法组合,即“FSM像移补偿+图像像移补偿”相结合,满足成像要求。
4 天基对地遥感成像系统像移影响及补偿研究现状
随着空间光学遥感技术的不断发展,高分辨率可见光时间延迟积分电荷耦合器件 (Time Delay and Integration Charge Coupled Devices)TDI CCD相机在光学遥感领域得到了广泛的应用。TDI CCD的原理是:对同一目标,通过多级光敏元件进行多次积分,将较弱的信号叠加为较强的信号输出,从而获得更高的信噪比和灵敏度,提高图像质量[16-17]。由于成像方式的特殊性,理论上要求像点的像移速度与探测器电荷包的转移速度相匹配。
实际空间相机在轨成像过程中时,由于轨道运动、姿态机动、地球自转等因素的存在,不可避免地会产生像移,像移对敏捷成像的卫星载荷影响更大,因为敏捷成像会有大角度姿态机动[18-21]。TDI CCD成像过程中,随着积分级数的增加,像速失配会使动态MTF急剧下降,降低分辨率和对比度,使得成像模糊。
目前就天基对地遥感系统像移影响的研究主要集中在两方面,一是卫星姿态稳定度产生的像移对成像质量的影响,二是卫星平台在轨颤振产生的像移对成像质量的影响。
4.1 卫星姿态稳定度产生的像移对相机成像质量的影响及补偿研究现状
以美国为代表的西方发达国家很早就系统地开展了像移研究,包括建立在轨各种因素引起的像移数学模型,和针对性的研究相应的补偿技术。然而,由于对地高分辨率成像的特殊应用和意义,与此类系统相关的像移模型及补偿技术公开发表的文献资料很少。
我国对地遥感系统建设起步晚,但经过数十年努力,也已建成了气象、资源、海洋等卫星系列及其应用系统,对对地遥感系统的像移及补偿技术研究,经过国内学者的不懈努力,与发达国家的差距也不断缩小。中科院长春光机所、北京控制工程研究所、中科院西安光机所等单位一直从事天基对地高分辨率成像方面的研究工作,在像移研究及补偿方面也是国内最早开始一批的单位,积攒了宝贵的经验。王家骐院士使用齐次坐标变化方法,建立了精确的像移补偿模型[22];武星星等根据几何投影的思想,推导地球为椭球情况下,大视场空间相机在不同视场位置的像移速度和偏流角计算解析式[23];王翀等提出在像方系中观测目标点视运动的成像方法,建立像移速度场模型,分析不同成像姿态下的像移速度场在像面的分布规律[24]。这些研究,从最开始“使用简化的球体地球模型(仅考虑了平飞姿态时星下点成像一种情况,带来一定的偏差)”,到“将地球为椭球这一因素考虑进去(但忽略了姿态变化产生的影响”,再到“考虑姿态变化和指向精度对像移的影响”,可见国内学者在对天基对地遥感光学系统像移的研究中,不断迭代,修正和完善,考虑的影响因素越来越全面,建模的精度也越来越高。
随着敏捷成像在对地遥感领域的出现,到逐渐成为发展方向,飞行器轨道和姿态等参数的变化较以前的成像模式更为复杂,因此对像移补偿的精度要求更高。
2015年10月7 号我国第一套自主研发的商用遥感卫星星座吉林一号成功发射,2020年7月3日高分多模卫星成功发射,这两种卫星的成功在轨应用,使得我国在敏捷成像像移补偿方面取得了突破性的进展,下面对这两种卫星的像移补偿分别进行阐述。
吉林一号卫星主要参数见表1[25]。
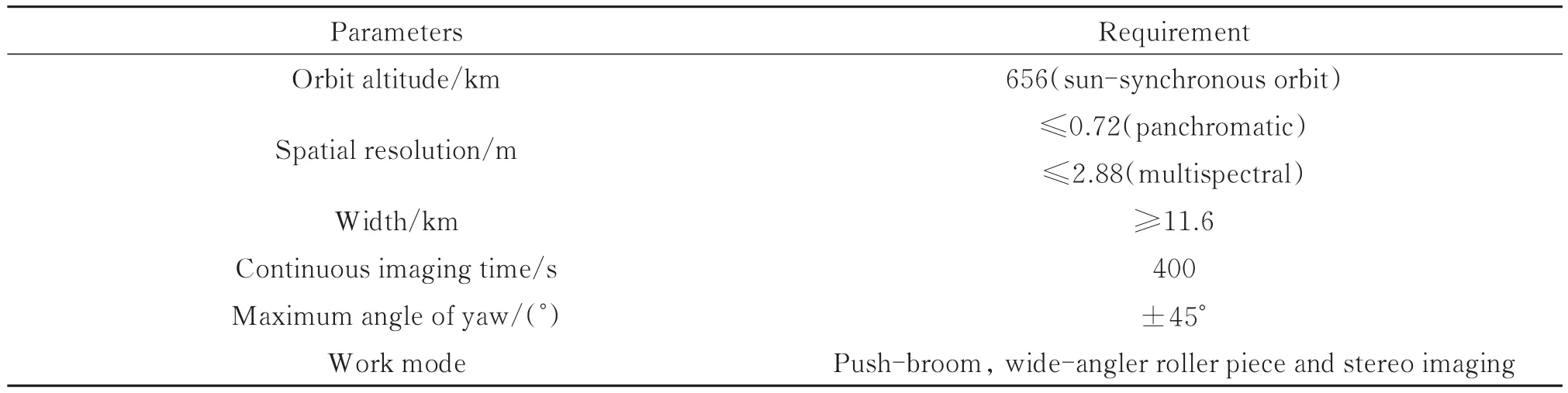
表1 吉林一号卫星参数Table 1 Technical index of JL-1 satellite
吉林一号卫星的主要载荷为轻型高分辨相机,光学系统采用同轴三反消像散的构型。系统焦距7.98 m,F数为F/13.3,焦平面通过4片TDI CCD拼接而成,确保系统获取的图像具有较高的信噪比。系统全色对地分辨率可到0.72 m,多光谱对地分辨率可到2.88 m。此外,吉林一号采用敏捷成像方式最大侧摆角±45°,为实现敏捷成像方式下的高分辨清晰成像,需要进行高精度像移补偿设计。
中科院长春光机所的徐伟在2017年的研究中[26],首先针对敏捷成像和高分辨成像模式,建立目标、卫星平台和高分辨率相机之间的关联,即建立相应的坐标系,通过光线追迹和坐标转换原理,最终得到考虑卫星姿态变化后,像面上各点的像移方程,通过求解像移方程,可得到像移量的大小。
在得到像移量之后,需要进行实时的像移补偿。上述研究团队采用“相机偏流机构调整”与“整星姿态调整”结合的像移补偿策略:拍照前,采用偏流机构调整策略,根据影像的移动速度调整焦面进行旋转,使像移量为零;进一步,通过卫星姿态调整策略,提前已知了相机与卫星的相对位置,仅靠平台机动,实现像移补偿。在轨数据显示,吉林一号卫星在轨像移补偿实现了“偏流角优于11′,像移速度优于0.3%”的补偿精度。图6为吉林一号实际在轨拍摄到的阿布扎比图像,在轨MTF的实际测量值为0.086,成像图像清晰,可见像移补偿技术已经达到了世界先进水平。

图6 吉林一号拍摄图像(阿布扎比)Fig.6 JL-1 image (Abu Dhabi)
高分多模卫星运行于太阳同步轨道,轨道高度643.8 km,同样也采用敏捷成像的方式。搭载一套高分辨率相机,相机采用同轴三反光学系统构型,焦距10.8 m,焦面采用3片TDI CCD拼接。系统全色对地分辨率可到0.42 m,多光谱对地分辨率可到1.68 m[27]。
高分多模卫星测摆角度最大为±50°,在大角度成像时,中心视场和边缘视场的像移速度存在差异。图7给出了在不同侧摆角度下,中心视场与边缘视场的积分时间差异曲线。左图为不同俯仰角,右图为不同侧摆角。俯仰角越大,不同视场积分时间的差异越明显。为了解决这一问题,研究团队给出了对积分时间分区域设置的策略。积分时间的改变对边缘视场MTF的影响如表2所示:可见对于敏捷成像,在卫星平台大角度成像时,采用积分时间分区域设置,对整体MTF改善较大。

表2 采用分片积分时间设置后,边缘图像MTF值及相机焦面的中心和边缘理论积分时间之间的差异Table 2 MTF and the difference of integral time between edge and center positions when the integral time is set separately

图7 不同成像角度下相机焦面边缘与中心视场积分时间差异Fig.7 Difference of integral time between edge and center positions of camera of focal plane under different satellite view angles
高分多模卫星的主要成像方式为主动推扫,此时姿态稳定度为2×10-3(°)/s,积分级数为48时,对图像MTF的影响较小,为0.989 7。真正影响成像质量的是像移,因为此时卫星需要姿态机动,这就导致像面上像移速度变化范围大且快。因此,在实际应用中,采用积分时间插值实时设置来解决这一问题。积分时间级数与积分时间频率之间的关系如表3所示。

表3 积分时间级数与积分时间频率之间的关系Table 3 the relationship between integral time series and integral time frequency
除以上研究外,中科院长春光机所的路朋罗等[4]以某卫星为例,基于离轴三反大视场空间相机,建立了适用于离轴系统的空间相机通用性像移速度场模型,卫星及相机参数如表4所示。仿真分析积分级数为96级时,不同MTF下降约束下,三轴姿态稳定度的要求。仿真结果如表4所示。可以看出,MTF下降约束相同条件下,对侧摆姿态稳定度要求最高;对平飞姿态时稳定度要求最低。若要保证MTF下降不大于0.05,则要求三轴姿态稳定度不大于0.001°/s。
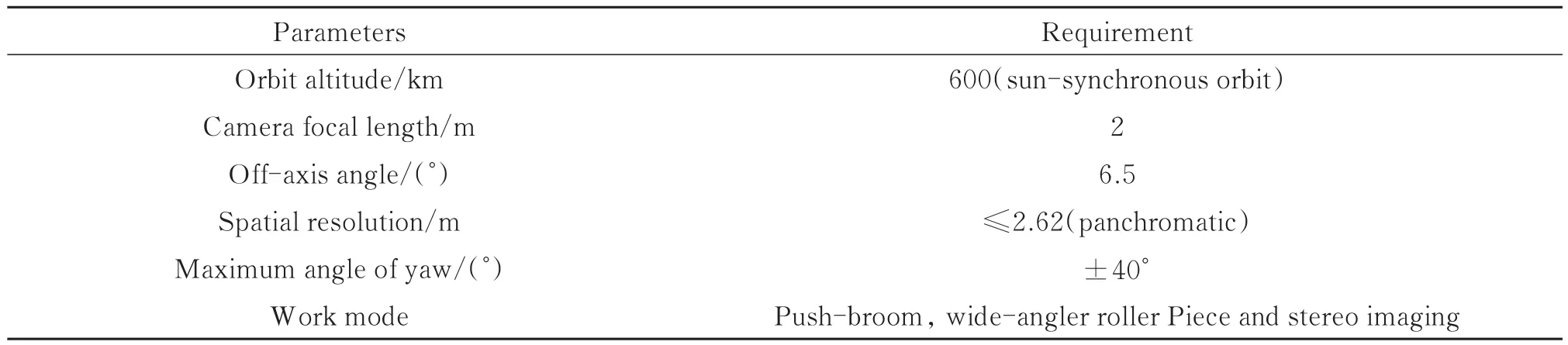
表4 卫星及相机参数Table 4 Technical index of the satellite and the camera

表5 MTF下降约束与姿态稳定度之间的关系Table 5 the relationship between MTF decline demands and attitude stability
4.2 卫星平台在轨颤振产生的像移对相机成像质量的影响及补偿研究现状
对地遥感系统在轨工作过程中,反作用飞轮、太阳帆板等运动部件会产生振动。幅度较大、频率较低的大部分振动能够被星上调姿机构补偿和抑制,但幅度更小、频率更高的振动会通过平台传递到成像系统,发生微弱的颤振,削弱平台姿态稳定度。由于高分辨率成像系统焦距长,多采用小像元尺寸的探测器,提高对地分辨率,因此其像元角分辨率都很小,颤振会导致像移的产生,降低图像质量。研究认为飞轮(振动频率20~40 Hz)和太阳帆板(振动频率1~2 Hz)的振动是颤振的最主要的来源。
欧美研究机构在平台颤振测量、颤振与像质作用关系等方面开展了系统、深入的研究,采用的手段包括计算机仿真、搭建实验平台和在轨测量等。从最初的理论探索——颤振对成像的影响用MTF来描述,到地面测试,再到计算机仿真用于指导遥感器设计,研究结果也促进了颤振隔离、抑制设备的研制,并已应用于卫星平台和遥感器的设计与制造中[28]。
2004年,BATC的MCCOMAS B K等开发了遥感分析设计评价仿真软件(Toolkit for Remote-Sensing Analysis, Design, Evaluation and Simulation),用于模拟、分析与测试遥感光学系统成像质量。在模型中,考虑实际在轨各项因素对MTF的影响,图8为该软件模拟平台颤振导致的图像降质效果[29]。
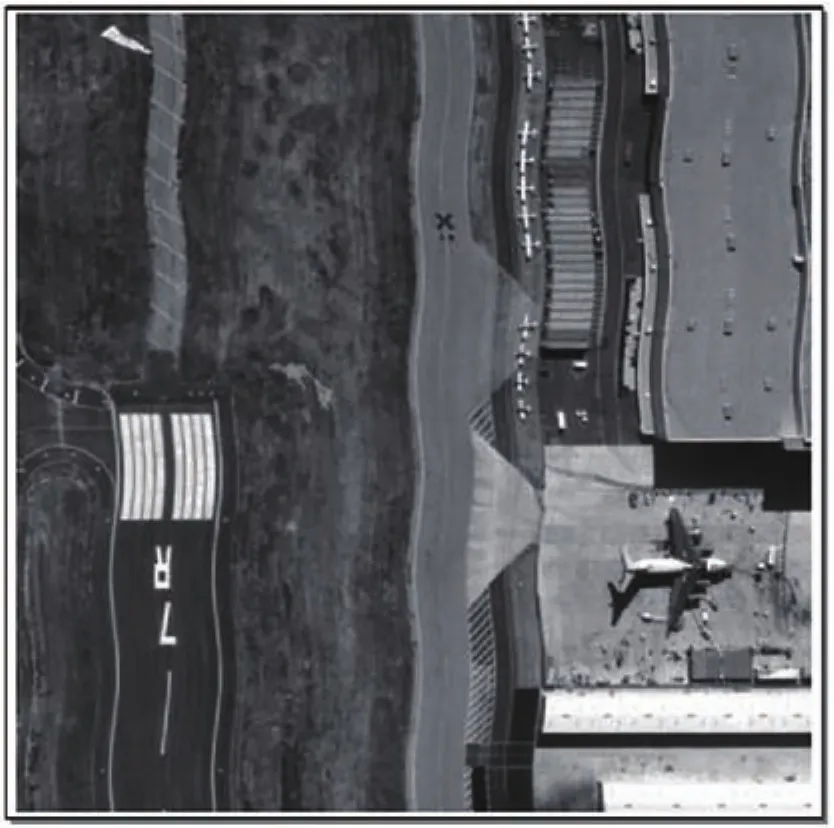
图8 平台颤振影响下的仿真遥感图像Fig.8 Influence of platform vibration on simulation image of optical remote sensor

图9 高仿真度成像像移测试平台Fig.9 Image motion testbed with high fidelity
国内从2000年开始开展卫星平台颤振对成像影响的有关研究工作,研究单位包括中科院长春光机所、中科院西安光机所、中科院上海技物所、中国空间技术研究院、北京空间机电研究所等单位。研究人员从已有研究基础出发,从像移仿真、成像链路地面测试、在轨测试等多个角度对平台颤振进行分析和验证。中科院西安光机所是我国在空间对地遥感成像技术方面最早的研究单位之一,2008年起,研制遥感五号-01、02、03星高分辨率光学载荷,对颤振对TDICCD相机的成像影响有较为深入的研究。该单位的西安光机所樊超等研究表明,随TDI积分级数的增加颤振的影响也随之增加,且仿真分析了滚动、俯仰、偏航三个方向的颤振对相机成像质量的影响,并给出像移补偿的方法:方法一是实时控制TDI CCD器件转动,保持列方向与像移速度方向一致;这种方法与前面介绍的吉林一号卫星上采用的“相机偏流机构调整”原理相似;方法二是通过控制行转移速度与像移速度相匹配,从而完成像移速度补偿[30]。
由于飞轮的扰振、整星力学结构的响应与光学系统光学增益特性均满足线性叠加的原理,2019年,中科院长春光机所的龚小雪等[31-32],建立了一种对从扰振源到成像像移的传递函数进行估算的数值分析方法,利用所得传递函数,实现同一批次飞轮工作在任意转速下所导致成像像移的预估。且将飞轮安装在高仿真度的整星样机中进行试验,获得了受飞轮微振动影响的图像像移数据像移实测瀑布图如图10所示。

图10 像移实测瀑布图Fig.10 Waterfall plot of measured image motion
在其他微振动引起的像移研究方面,国内也有研究和验证。前文提到的高分多模卫星为实现敏捷机动功能,配置了5台大力矩控制力矩陀螺(Control Moment Gyroscope, GMC)。卫星在轨运行期间,GMC和太阳翼驱动机构(Solar Array Drive Assembly, SADA)、天线驱动机构等运动部件会引起微振动。载荷对微振动的指标要求为:微动引起的相机视轴指向抖动不超过0.1像元。项目组基于卫星平台和典型光学载荷微振动抑制需求,提出“CMG群整体隔振+有效载荷隔振”两级隔振的抑制方案;分解得到微振动传递全链路(影响链路如图11所示[33])中各个环节的指标要求,梳理扰动特性,进行隔振设计,最终计算结果表明,在典型工况下,相机曝光时间内,最大像移量小于0.1像元。

图11 高分多模卫星微振动对成像质量影响链路Fig.11 GFDM-1 satellite impact link of micro-vibration to imaging quality
图12为高分多模卫星在轨拍摄的迪拜机场照片,可以看出图像轮廓非常清晰、无任何扭曲变形,道路局部放大图中飞机的细节清晰可辨,进一步表明上述微振动抑制措施有效可靠。
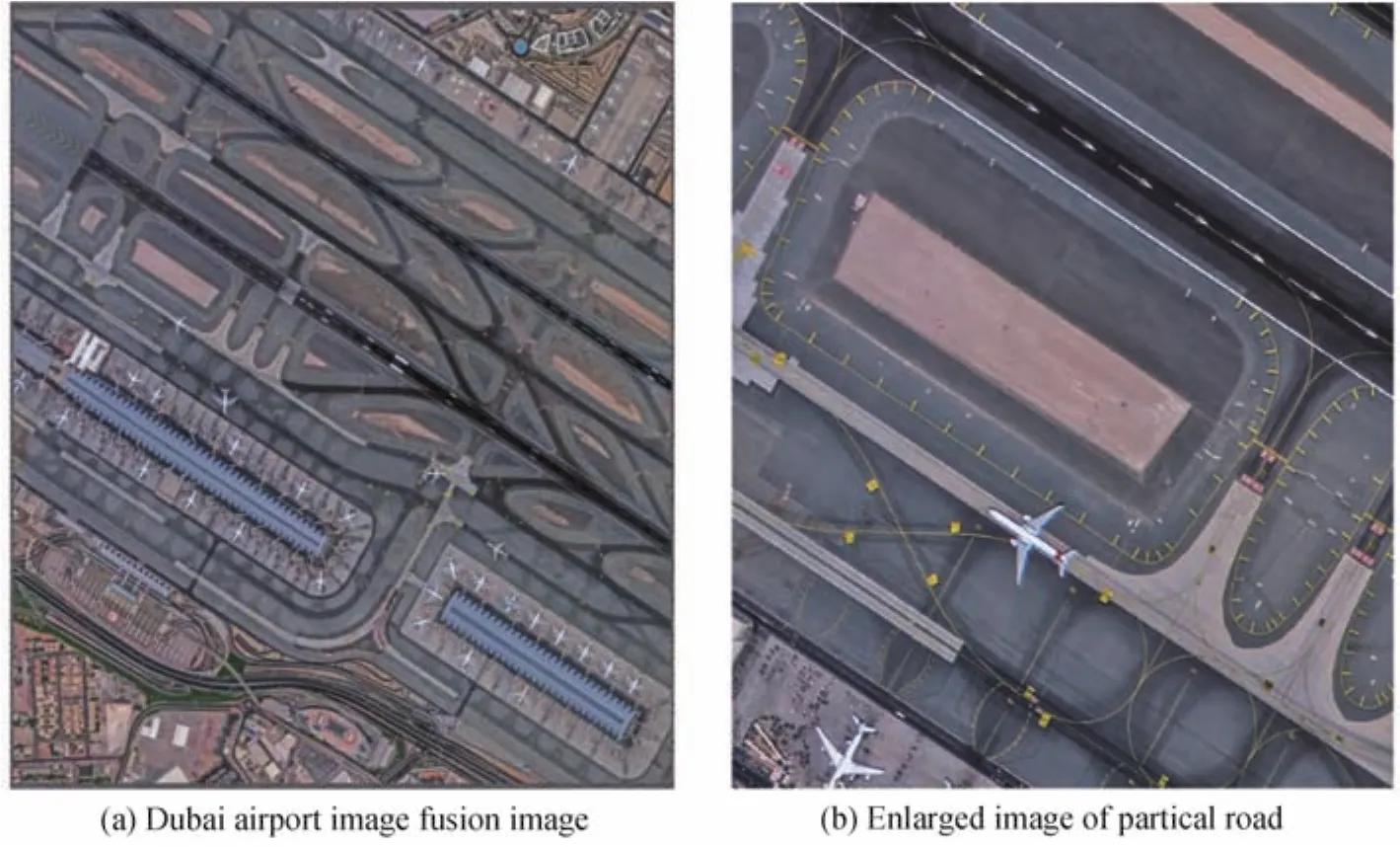
图12 GFDM-1卫星拍摄的迪拜机场Fig.12 GFDM-1 satellite image of Dubai airport photograph
基于以上研究内容可以看出,对于平台振颤引起的像移对成像的影响及补偿方面,国内外均已经打通了“理论分析-像移数学模型建立-像移模拟-实验室测试-在轨测试”全链路,特别是高分多模卫星微振动抑制设计与验证方法,可为我国后续敏捷型遥感卫星的微振动抑制设计与验证提供参考。此外,基于美国Landsat-8卫星姿态稳定性在1.7 μrad/2.5 s这一指标,可见美国已将卫星姿态稳定度产生的像移和卫星平台在轨颤振产生的像移综合考虑、综合修正,国内还未见综合研究的相关报道。最终在轨图像质量,也是卫星平台姿态稳定度和平台及运动部件在轨颤振产生的像移综合修正后的效果。因此可将二者的影响综合分析作为新的研究方向。
5 空间天文探测像移影响及补偿研究现状
空间大口径望远镜的稳像控制是一个复杂的系统工程,需要充分考虑各种扰动源,采取隔振措施抑制振动,合理设计望远镜的结构特性,考虑多级控制系统级联的设计方案。
国外很早就开展对空间天文望远镜稳像技术的研究,经过数十年的技术积累和创新已经有成熟的稳像技术应用到SOLAR-B太空太阳望远镜、哈勃太空望远镜,詹姆斯韦伯太空望远镜(James Webb Space Telescope, JWST)等在轨的空间望远镜中。
JWST空间望远镜参数如表6所示,光路图如图13所示[34]。

表6 JWST空间望远镜参数Table 6 Technical index of JWST

图 13 JWST 光路图Fig.13 The layout of JWST
JWST在轨工作过程中的主要振源是反作用飞轮,采用的稳像系统包括:1)两级被动隔振系统;2)姿态控制系统(Attitude Control System,ACS)(陀螺为速度传感器,星敏感器为位置传感器,反作用轮为执行机构),在0.1 s的观测周期内,指向精度优于7″、指向稳定度优于1″;3)精密导星控制系统(Fine Guidance Control System,FGCS)。在这三个稳像系统的共同作用下,整个望远镜系统的指向稳定度可到0.005″[34-37]。图14为 NASA 2022年公布的首批JWST拍摄到的宇宙深处全彩色照片之一。

图14 JWST 拍摄宇宙深处照片Fig.14 JWST image of deep space
ATLAST(The Advanced Technology Large-Aperture Space Telescope)是NAS规划的继JWST相机之后的大口径天文望远镜,相机口径8 m。ATLAST-8 m的稳像控制系统也是一个典型的复合轴系统,其中粗级为姿态控制系统,由刚性固联在相机上的惯导系统(包括加速度计、陀螺和星敏感器)测量相机质心的位置和姿态,采用基于动力学模型的反馈线性化算法、现代滤波和标定算法,由控制力矩陀螺实现相机2″的姿态控制精度。图15为超精密稳像系统,主要包括精密偏移图像运动传感器、FSM(由压电陶瓷驱动)和活动次镜(作为光学补偿器,采用电磁微驱动方式),通过数字PID算法实现0.001 51″的高精度稳像控制指标。为实现高精度稳像,ATLAST-8 m对GMC的振动采用了特殊处理,通过对每一个力矩陀螺的转子进行5自由度气浮,以及经由振动吸收框架将力矩陀螺安装于相机本体之上,使得传递至相机的振动幅值降低至0.000 2″[38]。

图15 ATLAST-8 m超精密稳像系统Fig.15 Ultra-precise image stabilization system of ATLAST-8 m
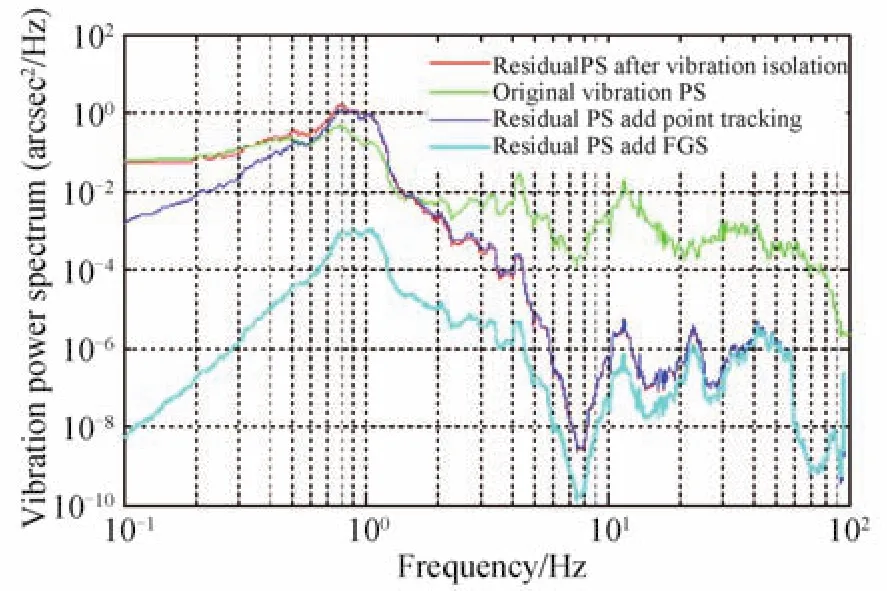
图16 经过精密稳像系统后的残余振动功率谱Fig.16 Residual power spectrum after the precision image stabilization system
目前,国内已部署不少地基大口径望远镜设备,相应的稳像控制技术比较成熟。为提高控制精度,普遍采用多级复合轴控制系统,此外一些抗扰能力较强的控制算法,如滑模变结构、自抗扰、内模等方法也得到了工程实现[39],但国内尚无在轨运行的空间大口径望远镜设备,因此在天基大口径望远镜稳像研究方面,还处于实验室仿真阶段。
中科院上海技术物理研究所的史少龙等[40]在国内外空间天文望远镜稳像技术案例和空间平台扰动源及其频谱范围和强度的基础上,提出了“隔振系统、指向跟踪系统和精密稳像系统”三级控制稳像技术方案,该技术方案与JWST望远镜稳像系统有相似之处。在其博士毕业论文中,重点针对精密稳像控制系统(关键参数如表7所示)进行了研究。关键技术包括:1)高精度亚像素质心细分算法;2)大口径FSM高精度驱动控制;3)大口径FSM系统辨识;4)大延迟、高精度闭环控制算法建模与仿真。研究过程分为仿真分析和实验室验证两个阶段。
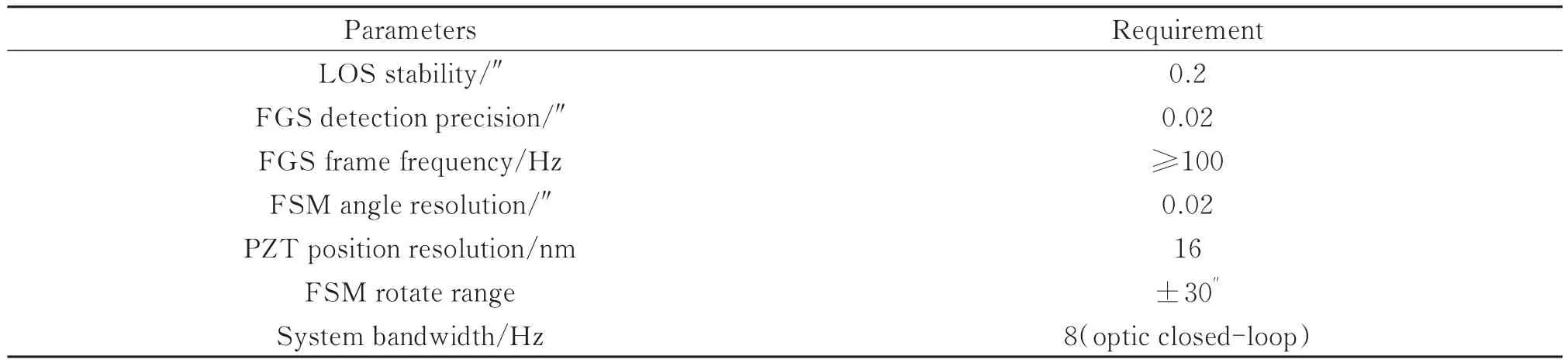
表7 精密稳像控制系统关键参数Table 7 Key parameters of FGS
仿真分析经过三级控制稳像系统后,平台的残余振动功率谱如图14中蓝线所示,最终的视轴晃动的均方根优于0.02",满足系统视轴稳定度0.2″的指标要求。
实验室验证的系统框图如图17所示。系统设计指标和验证实现指标的符合度见表8所示。从表中数据可以看出,该系统的纹波噪声和电压分辨率类比国内同类产品,均高一个数量级,为大口径FSM的高精度驱动控制提供思路。
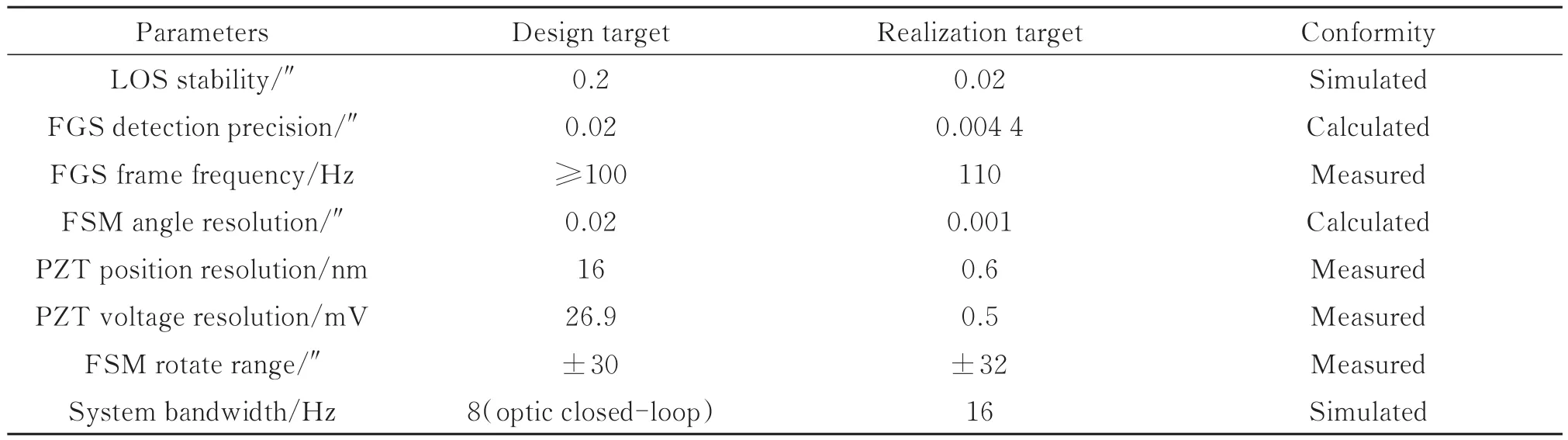
表8 精密稳像系统关键指标设计和实现符合度Table 8 Key parameters′ conformities of precision image stabilization system

图17 精密稳像验证系统框图Fig.17 The diagram of precision image stabilization verification system
6 火星探测器像移影响分析及补偿研究现状
火星高分辨率相机采用长焦距、小像元设计,使用TDI CCD 探测器件提高图像信噪比[41-43]。此外,火星轨道是大椭圆轨道,轨道示意如图18所示。当火星环绕器在轨运行时,其飞行速度和轨道高度在不断变化,这会引起相机的行转移时间、数据读出频率、偏流角和像移速度大小等都随之变化。

图18 火星轨道示意图Fig.18 Diagram of Mars orbit
首先,火星探测相机焦平面上的像移速度和火星环绕器的运行速度及轨道高度相关。需要精密的姿轨控精度来保证像质。中科院长春光机所的姬琪等[44]搭建了室内试验平台,通过地面测试设备仿真环绕器参数,通过动态目标模拟器模拟动态目标(目标可随姿轨控参数的变化而变化),相机拍摄目标,测试姿态稳定度对成像质量的影响,测试链路示意图如图19所示。MTF测试值如表9所示,从表中数据得到MTF与轨道误差的关系曲线,如图20所示,可以看出,随着轨道误差变大,MTF也下降严重。
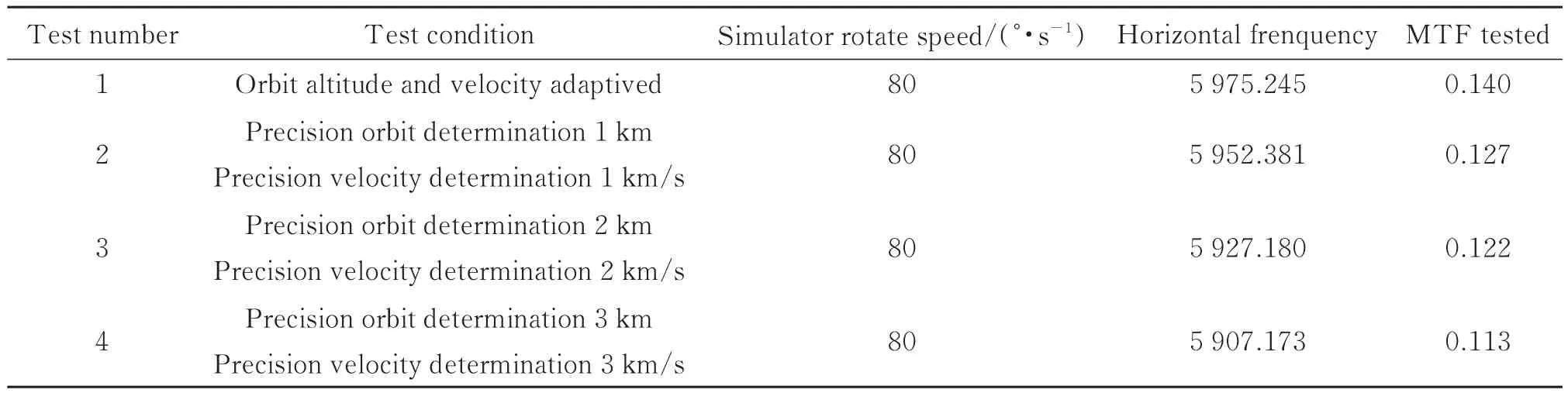
表9 MTF 测试结果Table 9 Test result of MTF
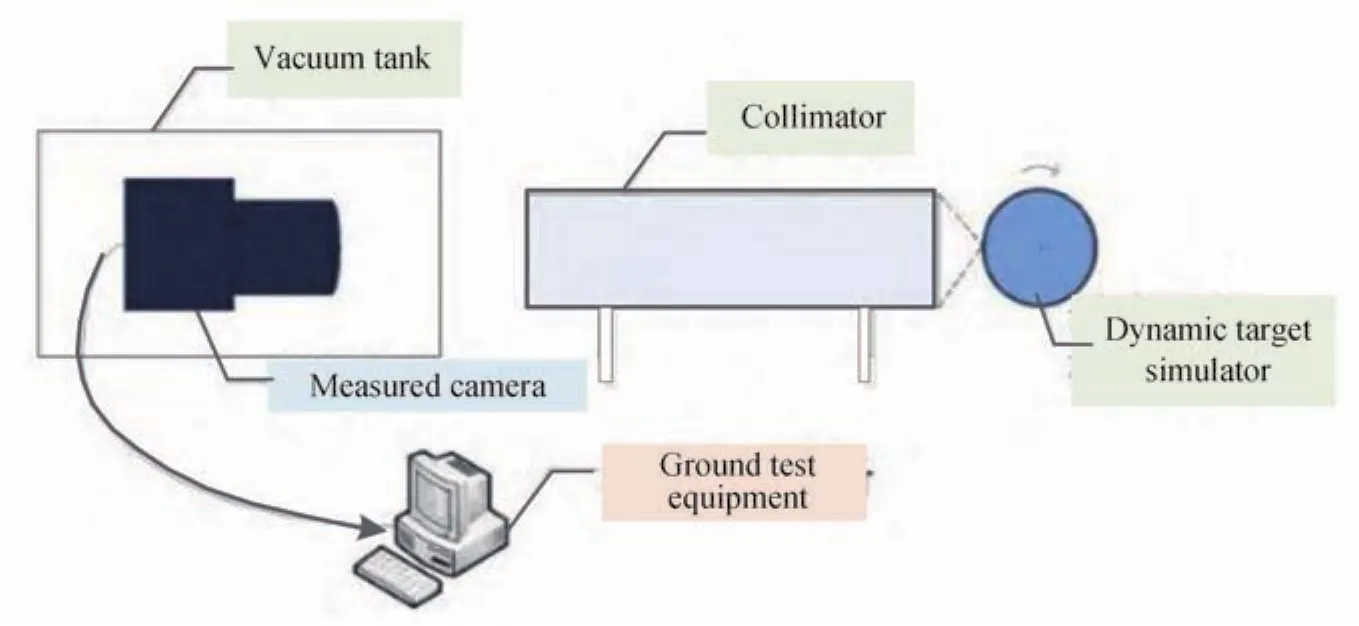
图19 测试链路Fig. 19 Test link diagram

图20 MTF与轨道误差关系曲线Fig.20 The relationship curve of MTF and orbit error
其次,轨道特性导致的像移速度矢变化也与以往的近圆轨道有较大差异。一方面,飞行器的速度被分解为环火速度和离心速度,离心速度导致像移速度变化量更快,对像移速度计算提出了实时性要求;另一方面,非星下点时,离心速度会叠加到探测器两个像移速度分量上,即沿积分方向和垂直积分方向,使得像移速度矢模型的建立更加复杂[45-50]。
基于以上问题,中科院长春光机所的闫得杰等[50]建立了火星探测像移速度计算模型,基于图19所示仿真试验平台进行了验证。结果如表10所示,可以看出表明,适配像移与计算像移下,动态MTF相差不大,表明像移速度计算模型的正确性。
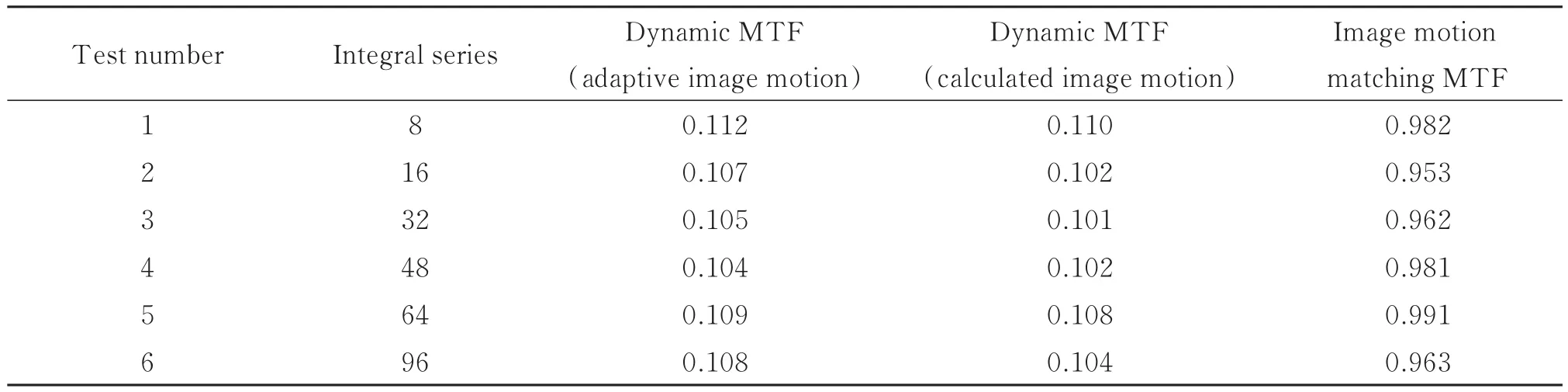
表10 动态MTF 测试值Table 10 Dynamic MTF test value
2020年7月23日,我国首个火星探测任务“天问一号”探测器成功发射,其有效载荷之一为高分辨率相机,可对火星表面进行高分辨率全色及彩色成像,将对局部重点区域进行高精度成像与详细勘测[51-52]。图21为“天问一号”在轨拍摄的火星全色图像,拍摄高度约330~350 km,成像分辨率约0.7 m,成像区域内火星表面小型环形坑清晰可见,足以证明我国在大椭圆轨道飞行器的像移研究及补偿方面处于国际领先水平。

图21 天问一号拍摄火星高清照片Fig.21 TW-1 satellite image of the planet Mars photograph
7 天基空间目标光学成像系统像移影响分析及补偿研究现状
天基空间目标光学成像系统的建设涉及众多科学技术领域,系统规模庞大,技术复杂,投资大,发展周期长,并且具有很强的政治敏感性。其技术核心在于高分辨率、高效率、高可靠性,在天基平台上对空间目标成像,距离近,且无论是平台还是目标,都在轨道上高速运动。图像获取时被摄目标与传感器之间的相对运动会导致运动模糊,产生像移。此外,天基平台自身的颤振及运动部件的微震动,也会产生像移,进而影响目标的识别以及测量的精度,因此,在建立成像系统模型时,必须加以考虑这些因素产生的像移的影响。
由于天基空间目标光学成像具有很强的政治敏感性,因此国外公开的文献中没有关于此类系统像移分析及补偿的相关内容。国内相关的研究也有限。解放军信息工程大学的蓝朝桢在其博士毕业论文中[53],对天基空间目标成像系统的像移,有如下分析:
假设曝光时间很短,我们认为被摄目标与传感器之间存在匀线性直线运动。假设图像f(x,y)进行平面运动,x0(t)和y0(t)分别是在x和y方向上相应的随时间变化的运动参数,假设T为曝光时间,结果为
g(x,y)为模糊的图像。
由傅立叶变换公式
得到式g(x,y)的傅立叶变换为
改变积分顺序,式(8)可表示为
外层括号内的积分项是置换函数f[x-x0(t),y-y0(t)的傅立叶变换。利用傅立叶变换的平移性质
得到表达式
令
G(u,v)可表示为熟悉的形式
若运动变量x0(t),y0(t)已知,传递函数H(u,v)可直接计算得到。假设当前图像只在x0(t)=at/T做匀速直线运动。当t=T时,图像由总距离a取代。令x0(t)=0,有
它表明,当u设定为u=n/a时,H就会变为0,此时n为整数。若允许y分量也变化,按y=at/T运动,则退化函数为
然而,相对匀速运动造成的模糊图像较为理想,实际在轨工作中,姿态变化导致的运动大多为变速和非直线性的,进行这些场景下图像的退化模型更为重要。此外,基于高分辨率的要求,天基空间目标观测成像越来越多的采用长焦距相机,卫星平台的各种振动对长焦距相机的成像质量有较大影响。此外,若相机放在跟踪转台上,则转台的稳定度也会造成天基空间目标成像系统光轴的变化,从而引起像移,降低图像的分辨率与可靠性。因此,可以借鉴对地遥感成像系统中卫星平台及运动部件在轨颤振产生的像移对相机成像质量的影响理论及数学模型,进行退化机理分析,建立完整的在轨动态MTF模型。此外,可进一步考虑将快反镜应用到天基空间目标近距离成像的像移补偿中。
8 总结与展望
对前述国内外天基光学成像系统像移影响及补偿技术总结,可以看出未来天基光学成像系统像移研究有望在以下几个方面取得重要进展:
1) 集成建模。基于天基设备的在轨动态成像特性理论进行建模,将姿态、颤振、相对运动等各个环节产生的像移考虑进去,基于“MTF具有可传递性,多个系统串联导致的最终MTF”这一特点,可采用系统的MTF去判断各类像移对系统成像质量的影响。
2) 建立系统级的全过程像移影响测试平台。无论是哪种用途的天基光学成像系统,卫星平台的姿态及颤振都是产生像移的主要因素,目前国内的测试设备已有真空罐、动态目标模拟器等可模拟真实在轨环境及目标的设备,但对于自身平台的姿态及颤振情况,很少有实验涉及。因此,需要将类似于卫星姿态模拟系统这种装置引入像移仿真测试平台中,进行系统级像移测试,测试结果可对集成建模的模型进行进一步修正。
3) 综合补偿。像移产生的因素很多,反映到图像质量上也是一个综合效果,因此在像移补偿的研究中,需要综合补偿,不是单一去补偿姿态或是颤振引起的像移。国外已有将快速反射镜应用到航天光学载荷的像移补偿工程方案中并取得了较好的补偿效果,在后续研究中,快速反射镜可作为天基光学成像系统综合像移补偿的一个方向。
近年来,随着我国航天事业的不断发展,空间光学技术不断突破,对天基成像系统的研究及工程应用与国外的差距也越来越小。空间光学成像系统运行在卫星平台上,不可避免的受卫星轨道变化、姿态角变化、平台颤振等因素的影响,像移不可避免。有效的抑制补偿方法需要基于对天基光学系统观测模式和性能参数的深刻理解,仅靠分析一种影响因素或是采用一种补偿方法往往难以满足成像质量的要求。通过对天基光学成像不同类型系统的像移影响及补偿技术的跟踪分析,可为天基光学成像发展提供思路和研究参考。
