多雷达协同探测技术研究进展:认知跟踪与资源调度算法
2023-07-04刘光宏葛建军孔令讲杨建宇
易 伟 袁 野 刘光宏 葛建军 孔令讲 杨建宇
①(电子科技大学信息与通信工程学院 成都 611731)
②(中国电子科技集团公司信息科学研究院 北京 100042)
1 引言
雷达是信息感知的千里眼,具有极高的军用和民用价值,广泛应用在防空预警、遥感测绘、反恐维稳等领域[1—5]。雷达信息获取与探测技术也一直是大国竞相抢占的前沿技术,同时是信息科学的重要组成部分。随着科学技术不断进步,先进电子对抗装备的不断问世和广泛列装,雷达的生存与发展正面临日益严峻的挑战。从生存环境上看,雷达面临通信等各类民用电磁干扰以及复杂的军用电磁干扰;从探测对象上看,集群、微弱、隐身、高空、低空等多样化目标的出现也给雷达探测与识别带来困难。此外,随着人工智能、自组织系统等新技术的发展,雷达的探测对象也正在向“多节点协同的体系化形态”快速演变[6—11]。因此,发展雷达目标探测新机理与新方法以应对新环境和新目标已迫在眉睫。
为应对新环境和新目标带来的新挑战,雷达技术领域也随之涌现出了一批新的技术方向,如太赫兹雷达、量子雷达、认知雷达、频控阵雷达等。这些技术方向意义重大,但目前主要还是在围绕单装雷达进行体制和方法创新研究。而单装雷达受限于孔径尺寸、系统能耗、收发共置的探测构型及其后向散射的探测机理,在面对隐身目标、主瓣干扰等威胁时,探测性能会出现严重恶化且缺乏有效应对手段。
相对而言,多雷达协同探测技术通过联动多部雷达,形成广域分布的收发探测构型,可以打破单装雷达的固有瓶颈。该技术通过一体化的资源调度力图实现多部雷达的深度协同,能够利用多部雷达的视角、频率、极化、能量、波形等观测资源,构建更高维度的雷达信号空间,充分获取空间分集、频率分集等探测增益,并在高维空间中消减干扰的能量优势,是应对新环境和新目标,显著提升雷达性能的有效技术途径。因此,作为未来雷达信息获取与探测技术的重要发展方向,多雷达协同探测近年来引起了众多学者和研究机构的广泛关注[1,8]。
多雷达协同探测相关研究工作范围广,涵盖了系统组织架构设计、人机交互模式、大带宽通信传输、空时频高精度同步、高维信号协同处理、异质非同步信息融合、一体化资源调度等诸多方面,且相关技术路线的发展呈现出纷繁复杂的态势。其中,系统一体化资源调度方法是实现多雷达深度协同的机制保障,也是协同探测的核心技术点之一。
现有组网雷达等多雷达系统的协同机制还停留在点航迹信息融合、任务分工、任务交接等较低层次的协同,严重制约了雷达协同探测的效能发挥[9]。只有具备了资源要素级的多雷达一体化综合调度能力,才能真正实现多雷达的深度协同,支撑协同探测能力的最优生成。因此,本文重点聚焦于多雷达一体化资源调度算法,围绕雷达认知跟踪这一典型任务,梳理和总结了近年来国内外该方向的最新研究进展,旨在为后续相关研究提供参考。
2 多雷达协同探测
2.1 概念内涵
多雷达协同探测的内涵较为宽泛,目前在学术界并没有非常统一且清晰的界定,特别是与组网雷达、网络化雷达、多基地雷达、分布式雷达等概念的关系和区别存在一定模糊。在本文中,作者把多雷达协同探测定义为一种广义的雷达探测方式而非一种特定体制的雷达系统。一般来说,多雷达协同探测具备4方面要素:
(1) 探测构型呈现为多节点分布式布局形态:采用有线/无线网络级联多个射频收发参数、体制模式不尽相同的雷达节点,通过信息交互,形成空间上广域分布的协同探测构型。
(2) 基于态势输入的任务和预案生成:能够根据当前探测区域的态势信息(包括:来袭目标数量/威胁度、待搜索区域的面积/搜索数据率要求等),完成面向态势的搜索、跟踪、拦截等具体探测任务生成,同时拥有对探测任务执行预案的离线模板匹配/自适应生成能力[11]。
(3) 以具体探测任务为目标的一体化资源调度与多节点深度协同能力:在当下的系统执行预案下,围绕具体的区域搜索、目标跟踪、目标识别等探测任务,通过高效的调度机制一体化的综合管控系统整体资源,达到多个雷达节点的紧密配合和深度协同,最终实现情景形态和探测任务的动态组合、客观适变和最佳探测。
(4) 多通道高维信号与多源信息的综合处理能力:空间广域分布的多个雷达,可以接收到多通道高维回波信号,并形成信号级、信息级、情报级的多类型数据;通过有中心、无中心或者多中心的通信传输和计算存储架构,系统能够采用相参、非相参等信号处理及点航迹数据多源信息融合方法对多雷达形成的信号级、信息级、情报级数据进行最优综合处理,最终实现检测、定位、跟踪、识别、干扰抑制等雷达功能。可以看出,组网雷达、网络化雷达、多基地雷达、分布式雷达等系统的探测模式只能部分满足上述的4方面要素。
多雷达协同探测理论上可显著提升雷达的探测效能和生存对抗能力。图1示例了多部雷达协同探测飞机编队的场景。可以看出,利用空间上广域部署的射频天线可以接收到不同时间、波形、角度、频率、极化等的目标多维散射信号,大幅增加目标不同特性的观测样本,获取空间分集、频率分集等探测增益,为提升目标信噪比和改善探测性能提供基础条件。

图1 复杂电磁环境下多雷达协同对空探测示意图Fig.1 Schematic diagram of multi-radar collaborative air surveillance in complex electromagnetic environment
从应对多元化探测任务的角度看,多类型、多用途探测平台的组网为多元化探测任务的高效执行提供了硬件基础。探测平台与自适应控制算法、人工智能和指战员之间的交互,能够支撑多雷达任务规划、任务执行预案的在线生成,有效提升多元化探测任务的执行效能[11]。
从应对复杂电磁环境的角度来说,协同多部雷达可构建更高维度的信号空间,由于干扰信号很难在全信号维度及其各变换域空间完全模拟目标信号,因此这可为目标和干扰信号的区分,消减干扰的能量优势提供更好的条件。
同时,具备高效协同机制的多部雷达在面对多节点体系化形态的新型探测对象时,可以形成“体系协同”对抗“体系协同”的均势。综上,多雷达协同探测的本质是从探测构型、信号维度、系统自由度等方向,由低维度向高维度演进,符合雷达技术发展的趋势和规律[5]。
近年来,组网雷达、分布式阵列相参合成雷达、集中式多输入多输出(Colocated-MIMO,C-MIMO)雷达、分布式MIMO (Distributed-MIMO,D-MIMO)雷达等新体制雷达系统被国内外学者广泛研究,且已被证实可以获得可观的协同探测增益。从某种意义上讲,这些系统也可以被看作宏观的多雷达协同探测理念在不同软硬件条件下的中间形态表现形式。例如,受通信、同步、计算等能力的限制,早期的多雷达协同采用的是多个自发自收雷达节点的简单组网协同机制,即组网雷达系统。图2为多雷达协同探测示意图,其中蓝点和红点分别表示收发天线;不同颜色的箭头代表不同频率、极化角度等的电磁信号发射和接收路径;棕色阴影示意探测效能。如图2所示,该协同模式只利用了单部雷达发射并接收的目标后向散射信号,传输处理的往往也是信号检测后的点航迹数据级信息。相比而言,CMIMO雷达、D-MIMO雷达等则进行的是多发多收的高维信号联合处理[12,13],但同时这些系统对传输、计算和时频同步有更高要求[14,15]。

图2 多雷达协同探测示意图Fig.2 Schematic diagram of multi-radar collaborative surveillance
2.2 技术挑战
大带宽通信、高精度时-空-频基准和网络云计算等相关技术进步,已为多雷达协同的加速发展奠定了必要的硬件基础条件,但要演化出高级形态的协同探测系统,仍面临诸多亟待解决的瓶颈问题。
2.2.1 多雷达协同认知的控制闭环构建
闭环即多雷达协同探测数据、控制指令交互的回路。协同认知闭环的构建可以充分利用探测资源,实现探测平台精准、深度、实时的协同,从而有效提升探测系统威力。闭环是探测系统中一个广义的控制概念,可以从不同的角度对其进行相应的表述。如图3所示,从狭义的角度解释,协同探测闭环是由目标信号处理、多雷达数据融合、雷达资源控制调度3要素构成的“感知-处理-决策”的信号处理算法级闭环。

图3 多雷达协同认知闭环构建Fig.3 Cognitive closed-loop for multi-radar collaborative surveillance
而从广义层面来看,协同探测闭环是综合考虑探测环境、装备条件、情报信息、指挥员决策、人机智能交互等多要素融合后的协同系统级闭环[11]。系统级闭环旨在将指挥员的决策与协同探测硬件平台结合以构成信息的回路,完成对探测任务、处理模式和调度机制相关工作预案的生成,以实现人-机、机-机之间的深度协同。由于协同闭环构建的过程涉及人、环境、机器等多种要素的协调配合,制定一套通用、高效的认知闭环是协同探测系统设计的难点之一。
2.2.2 通用的多通道高维信号与多源信息处理方法
广域分布的天线可接收不同扫描时间、收发角度、波形、频率、极化等的回波信号,大幅增加了观测样本的数量和回波信号的空间维度[16,17]。要挖掘信号空间带来的探测效能增益,需要研究匹配的高维信号处理与信息融合方法。但是当下的雷达信号处理与信息融合方法并不能简单推广适用于多雷达协同探测的场景。例如,简单组网雷达只进行了点航迹数据级的协同融合处理;分布式阵列相参合成雷达、C-MIMO雷达的信号处理方法只适用于收发阵列临近布置的情况,收发天线无法充分获取目标的多角度电磁散射特性和空间分集探测增益;此外,多通道信号相参处理往往需要信号时间、相位严格同步[14]。D-MIMO雷达虽然适用于广域分布的收发阵列,但是往往也是对同频段且时间同步的回波信号进行处理,并没有考虑到由于多个雷达扫描波束时间不同步导致的波束追赶等问题。
2.2.3 具体探测任务驱动的高自由度系统全局资源调度能力
多雷达的协同和联动可提供更丰富的空间、时间、频率、极化、波形、功率等系统探测资源,但系统自由度增加的同时系统管控和调度的难度也随之增加。要充分挖掘一个高自由度系统的潜在探测能力,需要以系统任务为驱动,以全局态势为基础,对各雷达节点的可控资源进行动态的最优调度。因此,高效的系统调度是多雷达系统探测性能优化的前提,也是“体系协同”的机制保障[7]。然而,目前的雷达调度理论和方法主要还是面向多功能相控阵雷达、MIMO雷达等特定的系统来进行针对性的研究。面向多雷达协同探测的协同机制还停留在现有组网雷达的任务分工、交接等较低层次的任务级协同水平。资源要素级的协同探测调度理论和方法还在起步阶段,也是当前的重点研究方向。例如,美军于2017年提出的“马赛克”作战概念便是资源要素级协同的一种具体实践方式[7,18],利用一系列分布式、低成本、易于组织的探测单元构建一个探测性能强大、适应性强、易于隐蔽的网络化探测系统。
多雷达协同探测技术涉及了控制闭环构建、信息信号处理、调度控制机制设计等多个维度,是一个从底层处理(信号处理级闭环)到顶层应用(协同交互控制闭环)的系统性研究。针对协同探测系统的顶层架构设计、协同交互控制闭环构建等方面,已有部分工作对其进行了系统性的建模和探讨[8,11,18],例如,空军预警学院丁建江[11]从协同探测的人机智能融合闭环建模、闭环的工程化设计等方面对协同作战级闭环构建问题展开了深入研究。本文则聚焦于信号处理算法的闭环,以多雷达协同认知跟踪与资源管理问题为牵引,对多雷达协同探测瓶颈问题进行梳理和探讨。
3 多雷达协同认知跟踪算法的闭环构建
本节主要围绕图3中的信号处理级闭环,介绍多雷达协同探测的信号处理认知闭环的概念。在此基础上,以目标跟踪任务为例,总结认知跟踪与资源调度信号处理算法闭环的构建流程。
3.1 多雷达协同探测的信号处理认知闭环
不同于传统情报级组网雷达开环的信号处理,协同探测系统采用认知闭环的信号处理机制[11,19]以提升系统的环境适应性和探测能力。如图4所示,认知信号处理是一个由感知、反馈、分析、决策再到感知所形成的闭环流程。
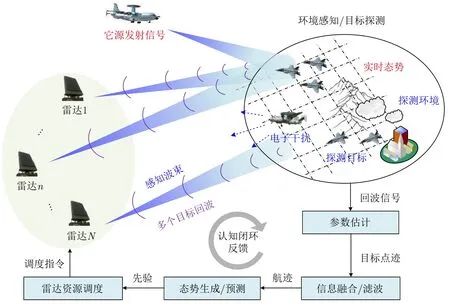
图4 多雷达协同探测的信号处理认知闭环Fig.4 Cognitive closed-loop for the signal processing of multi-radar collaborative surveillance
利用环境反馈信息调整雷达系统资源参数是实现认知闭环的关键所在。图5更具体地展示和描述了图4中认知闭环协同探测信号处理流程,具体如下:
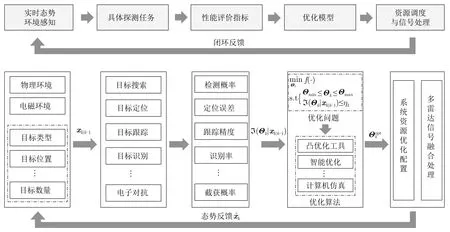
图5 多雷达协同探测及资源调度算法处理流程的认知闭环Fig.5 Cognitive closed-loop for the processing of multi-radar collaborative surveillance and resource allocation algorithms
(1) 态势与环境的参数化输入:时刻k,探测系统通过与环境交互学习,预测实时的态势信息xk|k-1。这里的xk|k-1在不同探测任务场景中有不同定义,如:在跟踪任务中xk|k-1可以是特定目标的位置、速度、角度等参数信息的预测值;
(2) 具体探测任务及其性能评价指标建模:以态势信息xk|k-1为输入,以雷达系统的收发资源Θk为基础,围绕具体探测任务构建性能评价指标Ξ与态势和资源的数学关系。以目标跟踪任务为例,雷达的收发资源Θk可以为雷达的跟踪波束分配、波束驻留时间、发射功率等,而跟踪任务的性能指标可以为目标的跟踪精度。函数本质是在特定态势信息xk|k-1下,雷达系统资源参数Θk与探测性能Ξ的数学映射;
多雷达协同探测通过不断感知和理解环境,并根据环境的变化实时地调整协同探测系统的参数配置,以实现探测性能的动态增益,由此构建了认知雷达概念中所强调的“感知-行动”认知闭环[20],其信息处理流程也符合OODA环(即由观察、调整、决策、行动,再由行动结果指导下一次观察所构成的闭环决策过程)的闭环控制概念[21]。
3.2 多雷达协同跟踪算法的认知闭环
3.2.1 认知跟踪算法及其特点
作为探测系统的典型任务之一,多目标跟踪旨在实现对跟踪目标状态(包括:位置、速度、RCS、航向等)的连续时刻估计[22],支撑战场情报/态势信息的输出。若将闭环认知的信号处理机制引入到跟踪任务中,雷达系统则可利用当前跟踪算法中获取的实时态势完成目标状态先验信息更新,同时用于指导雷达系统在下一个周期发射资源参数的优化配置,以进一步提升下一个周期的跟踪性能。
如图6所示,相比于传统跟踪而言,认知跟踪最大的特点便是其目标先验信息贯穿始终的用在信号处理和资源调度过程中,呈现出一套闭环的信号处理模式。而在传统多雷达跟踪模式中,目标先验信息仅用于跟踪状态更新,并不参与雷达的其他处理过程,整体信号处理呈现一种开环的状态。
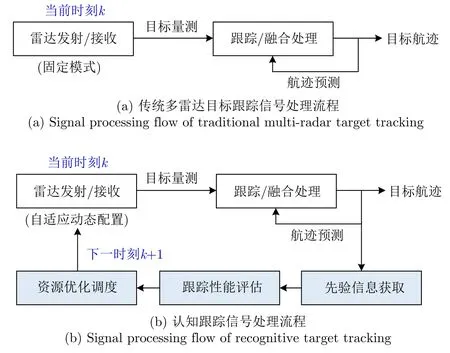
图6 认知跟踪算法与传统融合跟踪算法的区别Fig.6 The difference between traditional target tracking and recognitive tracking algorithms
接下来,本文将围绕多目标跟踪任务,以典型多雷达数据级融合跟踪算法为例,对闭环认知多雷达协同资源调度相关技术原理及流程进行详细介绍。
3.2.2 多目标跟踪场景及雷达系统描述
如图7所示,多雷达协同目标跟踪需要利用N部雷达节点合作完成对Q个跟踪目标状态值(q=1,2,...,Q)从初始时刻k=0开始的序贯估计。
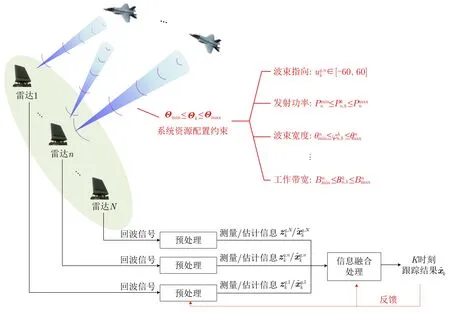
图7 多雷达协同多目标跟踪场景Fig.7 Scenario of multi-radar collaborative target tracking
在时刻k,多雷达以特定的系统资源参数Θk完成射频探测及回波信号接收处理,从而得到目标的量测数据(q=1,2,...,Q,n=1,2,...,N),这里的表示雷达n收到的关于目标q的量测;然后,雷达通过对量测数据进行融合、滤波处理后,得到目标状态的估计;最后,目标状态估计可被用于预测下一时刻状态(即计算跟踪先验信息)并反馈给跟踪信息的融合处理模块,以完成后续滤波过程。
在实际雷达系统中,受制于发射机硬件限制,其系统资源通常存在上下边界约束,即
注意,式(1)仅用于表达资源变量往往存在约束限制,而具体资源约束的需要参见对应的数学表达式。雷达系统探测资源的具体类型和边界约束值[Θmin,Θmax]在不同雷达系统中通常不同。图8为网络化MIMO雷达多目标跟踪场景意图,其中,雷达1,2,3分别发射了3,2,1个波束,实现对3个目标的协同跟踪。如图8所示,以文献[23]考虑的组网CMIMO雷达系统为例,多个C-MIMO雷达节点同时在多波束模式下进行多目标跟踪。此时,雷达系统发射机波束数量、发射功率的边界约束可分别建立为
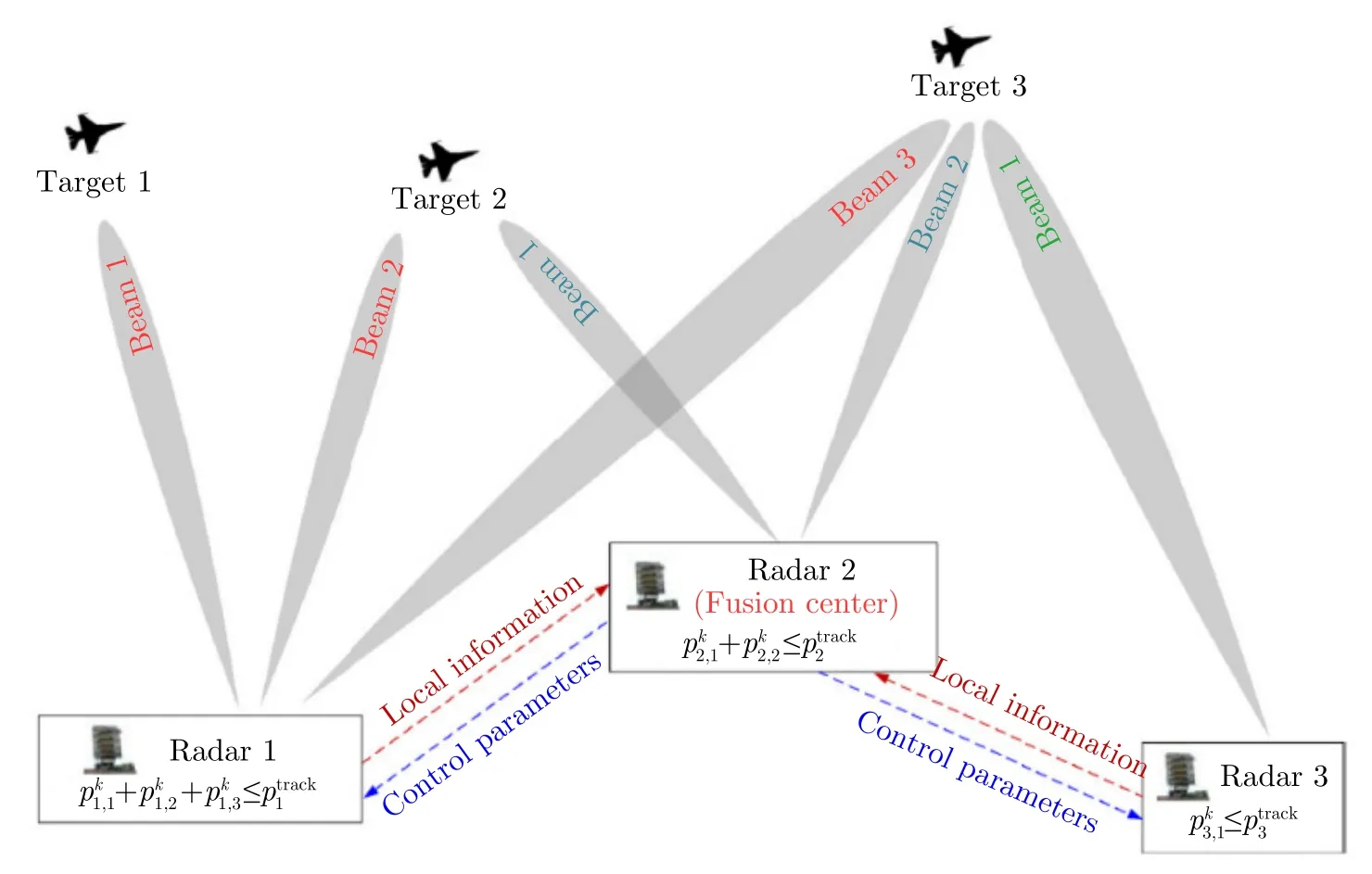
图8 网络化MIMO雷达多目标跟踪场景意图Fig.8 Scenario of multi-target tracking with netted MIMO radar
综合以上模型可看出,多目标跟踪的本质就是在雷达系统能力约束下 [Θmin,Θmax],综合一体化运用雷达系统资源Θk,实现对跟踪目标状态信息的合作估计。
3.2.3 多雷达协同跟踪模型
跟踪问题中通常使用目标状态模型(运动模型)和量测模型分别描述被跟踪目标的运动状态更新规则及量测信息的表达式[24]:
因此,误差协方差矩阵也可写成一个与雷达系统资源参数Θk相关的函数:
3.2.4 跟踪信息融合架构
(1) 集中式融合架构
如图9(a)所示,集中式融合架构中所有雷达节点与公共的融合中心相联。雷达节点将目标的原始量测(n=1,2,...,N)直接传输到融合中心,所有量测被堆叠成一个大的向量。结合先验信息和量测数据,集中式融合可通过序贯贝叶斯滤波[27,28]处理得到跟踪目标状态的估计值。

图9 多雷达协同信息融合架构Fig.9 Multi-radar information fusion architectures
(2) 分布式融合架构
3.2.5 目标跟踪性能指标
目标跟踪性能指标旨在描述或预测,在具体的资源分配及融合处理方式下,多雷达协同跟踪可获得的目标状态估计精度。常见的性能指标包括跟踪误差的预测协方差矩阵[29]、目标观测误差的互信息[30]、量测误差的克拉默-拉奥界(Cramér-Rao Lower Bound,CRLB)[31]以及后验克拉默-拉奥界(Posterior CRLB,PCRLB)[32]等。
PCRLB是目标跟踪中最为经典和常用的性能指标。其计算过程与序贯贝叶斯滤波的实现是完全匹配的,因此也被称作贝叶斯克拉默-拉奥界(Bayesian CRLB,BCRLB)[33]。从统计意义上讲,PCRLB能够给出任意无偏估计器估计误差的理论下界:
其中,p(x,z)表示关于估计状态x和量测z的函数;为目标状态的估计值;Ep{·}表示关于p的数学期望;为目标q状态估计误差的PCRLB。PCRLB给出了状态估计均方误差(Mean Squared Error,MSE)的统计下界,在给定目标跟踪的系统模型后便可直接计算或拟合出对应的跟踪PCRLB。因此,PCRLB不受单次跟踪实验的随机性及使用的状态滤波器的影响,是一个通用的跟踪性能理论下界[34]。
3.2.6 资源调度问题及其优化准则
从数学上看,多雷达协同认知跟踪资源调度的数学本质是一个以雷达系统资源参数Θk为变量的优化问题。根据任务场景和资源调度优化准则的不同,该优化问题主要可以分为两类。
(1) 任务性能最优准则
基于该优化准则,雷达系统会用尽可用系统资源,来实现跟踪性能的最优化,即实现所谓的任务性能最优。结合前述的数学符号,该优化问题可被建模为
(2) 系统资源最小化准则
基于该优化准则,雷达系统会在保证一定的探测任务性能约束条件前提下,尽可能地使得雷达系统消耗资源最少,即所谓的资源最小化准则。该优化问题可被建模为
其中,目标函数f(Θk)用于表征雷达系统资源的消耗水平;约束表示预设的对目标q的跟踪性能要求,它能够保证在最小化系统资源消耗的时候不会影响探测任务性能。
从应用角度来看,雷达系统要在有限发射资源约束下,同时执行多元化探测任务(如:多目标跟踪、检测跟踪一体化等[35]),任务间对雷达发射资源使用存在竞争。此背景下,如何设计一个可兼顾不同类型任务综合性能及雷达探测能力约束的目标函数f(·),以使资源调度方案在多任务资源竞争关系下实现综合性能最优,成为资源调度研究的关键问题。
3.2.7 闭环结构的认知跟踪流程
若在闭环认知的多雷达协同机制下引入雷达系统的资源调度模块,则可利用跟踪目标先验作为环境认知的反馈,形成面向认知跟踪的多雷达协同系统资源调度模式。该模式的处理流程如图10所示。整体的流程主要包括跟踪性能预测、系统资源调度以及数据融合跟踪信号处理3个模块,涵盖了本节上述内容所介绍的整个处理过程。
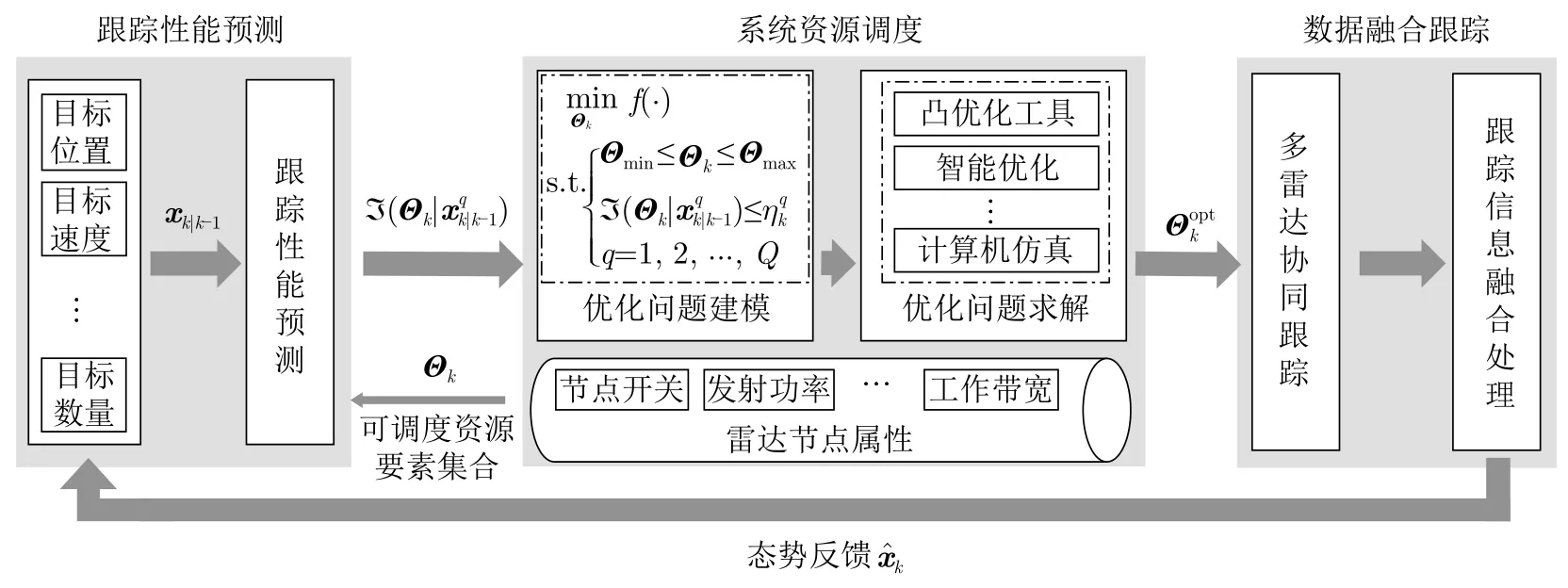
图10 资源调度为基础的雷达认知跟踪闭环的处理流程Fig.10 Resource allocation-based processing flow of the radar cognitive tracking
4 多雷达协同认知跟踪资源调度算法进展
认知跟踪是多雷达协同探测所执行的典型任务之一,而探测资源动态最优配置则从系统控制调度的维度为认知跟踪性能的提升提供了机制保障[25]。结合图10认知跟踪闭环处理流程来说,当前该领域相关工作主要涉及以下3个方面:
(1) 雷达节点属性及可调度资源要素:雷达节点属性及能力决定了可调度控制的资源要素类型。而资源要素对应了资源调度模型的优化参量及后续输出的系统资源配置结果。
(2) 数据融合跟踪架构与跟踪性能预测:数据融合与跟踪架构决定了多雷达数据的传输计算复杂度及协同跟踪性能。同样,协同跟踪性能预测指标的推导也需要考虑数据融合跟踪架构的影响。
(3) 资源调度优化问题模型与求解:资源调度优化问题的最优解对应了多雷达协同探测系统下一时刻的最优发射资源调整方案。但是由于探测环境、目标对象以及雷达系统自身的复杂性,要建立一个尽量贴合实际探测情况的优化模型往往比较复杂。此外,多雷达协同探测系统的资源要素自由度高、约束多,形成的优化问题往往是非凸的和NPhard的,因此求解往往比较困难。
上述3个方面是影响认知跟踪资源调度技术的可优化资源参数类型、信息处理模式、调度结果综合性能的主要因素。第4节将基于以上3个方面,从协同雷达节点属性及资源要素、多雷达信息融合架构与方法、目标跟踪预测性能指标、资源调度准则与模型、复杂任务场景5个角度对认知跟踪与资源调度研究工作进行系统性的梳理和总结。
从技术发展角度来讲,单/多雷达认知跟踪资源调度技术在共同发展。单雷达资源调度技术从模型是多雷达协同调度模型的基础。因此,在本文后续对多雷达协同认知跟踪进展调研中,将穿插具有代表性的单雷达资源调度工作。
4.1 不同雷达属性及资源要素下的资源调度算法进展
雷达属性涵盖了雷达节点的工作体制、系统参数、任务用途等多个维度。资源要素则是该雷达系统具体的可管控资源变量(如功率、驻留时间、波束指向、节点开关等)集合及其约束。
4.1.1 雷达属性
雷达资源调度研究经历了从传统机械扫描式雷达到相控阵雷达、MIMO雷达等多种体制雷达的发展。针对机械扫描式雷达,由于其发射参数诸如数据率、波束指向等都工作在固定模式,可调度资源自由度较低。因此,认知跟踪资源调度研究目前主要针对相控阵和MIMO等管控自由度更高的雷达系统。
(1) 相控阵雷达
相控阵雷达系统可通过改变阵子相位,实现波束的空间扫描,其节点的波束指向、驻留时间、回访时间、带宽、功率、波形等资源可进行实时调整。2017年,电子科技大学王祥丽等人[36]提出了相控阵雷达波束指向和驻留时间联合调度策略,在满足跟踪精度预设要求下,最小化了跟踪时间资源消耗。同年,西安电子科技大学Yan等人[37]以网络化反导防御应用为背景,提出了一种相控阵雷达协同跟踪目标分配与驻留时间分配算法。随后,该算法还被拓展到了目标搜索加跟踪任务场景中[38]。2021年,南京航空航天大学Shi等人[39]提出了一种联合目标分配与资源优化策略,实现了雷达波束指向、重访时间、工作带宽和驻留时间的多资源变量联合优化。
以上工作都侧重于雷达射频资源的优化调整,2021年,电子科技大学Yuan等人[40]将射频资源的优化与相控阵雷达的任务排布进行了联合考虑,提出了多目标跟踪的跟踪序列和驻留时间联合分配策略。除上述面向目标跟踪任务的资源调度工作外,针对相控阵雷达资源调度工作还被拓展至电子对抗[41,42]、感知通信一体化[43]等场景中。
(2) MIMO雷达
根据阵元构型不同,通常MIMO雷达可分为集中式MIMO (C-MIMO)雷达[44]和分布式MIMO (DMIMO)[16]雷达两类。C-MIMO雷达的多个阵元临近放置,可同时发射正交或者非正交波形,合成多个方位波束以独立执行多个探测任务[44]。相比相控阵雷达,C-MIMO可充分获取波形分集增益提升参数估计性能。2015年,Yan等人[45—47]率先建立了CMIMO雷达多发射波束功率和指向的联合分配问题,实现了多目标跟踪任务的资源动态优化,且在后续工作中进一步考虑了雷达杂波影响。2018年,电子科技大学Cheng等人[48]提出了一种自适应跟踪资源管理方法,通过配置雷达的子阵数、被照射目标和发射波形,实现了目标跟踪精度提升。
相比上述C-MIMO雷达,D-MIMO在空间中拉开收发天线阵面,能够充分获取空间分集探测增益。类似的,国内外学者也围绕D-MIMO雷达的认知跟踪开展了资源调度方法研究,包括:发射带宽[49,50]、发射波束与波形[51,52]、功率分配[53,54]、收发天线选择[55]、接收波束优化[56]等资源的动态优化。例如,2015年国防科技大学Chen等人[53]利用合作博弈优化,实现了分布式MIMO雷达的发射功率调度,提升了目标的跟踪精度。2016年,Yan等人[45]将前期提出的集中式MIMO雷达的波束指向和发射功率联合分配方法拓展到了基于集中式融合架构的组网集中式MIMO雷达系统。2020年,军事科学院的Liu等人[57]完成了针对组网分布式MIMO雷达的驻留时间优化分配。
相控阵雷达和MIMO雷达由于其资源自由度高、参数配置灵活等优点,在认知跟踪领域得到了广泛关注。其中,MIMO雷达相比于相控阵雷达还具备更高的波形发射多样性,可调度资源自由度进一步提高。总体而言,认知跟踪资源调度更利于在MIMO、相控阵雷达等为代表的高自由度、多功能雷达体制上实现。
4.1.2 资源要素
现有的资源调度工作已围绕雷达的频段[58—60]、带宽[61—63]、波形[64,65]、发射功率[45,66—68]、方向图综合[51,52]、波束驻留时间[40,69—71]、回扫周期[72]、节点开关[73—75]、节点位置[76]等多种系统资源要素开展研究。本文根据资源要素调整的实时性程度将其划分为时敏和非时敏探测资源。
(1) 时敏资源
时敏资源是指根据调度指令能够实现快速控制和调整的系统资源类型,如雷达发射功率、波束驻留时间、节点开关、阵元优化、波束方向图、波形参数等。
就目前的研究现状而言,面向认知跟踪的大部分研究工作是围绕时敏资源优化调度开展的。例如,2012年,华盛顿大学Chavali等人[77]提出了一种多目标跟踪自适应功率分配策略,实现了认知雷达发射功率动态调整。2014年国防科技大学Sun等人[78]针对MIMO雷达定位问题,通过优化节点功率,实现了定位精度提升。
除单纯发射功率优化外,部分工作还将发射功率资源与波束指向[23,79]、节点开关[75,80]、带宽[81]、子阵选择[82,83]等资源要素结合,进行了多类型综合资源优化调度。例如,2014年国防科技大学Ma等人[84]针对MIMO雷达网络目标定位场景,实现了雷达天线子阵选择和发射功率联合优化。同年,代尔夫特理工大学Katsilieris等人[85]以被跟踪目标威胁度最小作为优化目标,实现了传感器节点的优化选择。2022年Shi等人[86]针对分布式相控阵雷达网络发射资源管理问题,联合调度了各雷达功率、驻留时间、波形带宽和脉冲长度,显著改善了雷达的LPI及目标探测性能。2023年江苏科技大学Jin等人[87]利用算法博弈论方法,实现了分布式认知雷达网络的发射功率和带宽联合优化分配。
另一个研究趋势是将管控的资源从雷达节点级和波束级进一步细化到阵元级,通过管理雷达阵元开关、极化方式、发射波形等实时综合方向图,从更底层实现雷达级和波束级的管理。阵元级别的资源管理的模型颗粒度比雷达级和波束级管理更细致,建立的信号模型更精准,但其代价是优化管理的数学问题往往比波束级更加复杂。例如,2021年西安电子科技大学Sun等人[52]对C-MIMO雷达各阵元发射波形相关性矩阵进行了在线设计和管控,实发射方向图优化。同年,电子科技大学Ren等人[51]针对无线网络雷达,研究了阵元级自由度的认知跟踪资源调度方法。
(2) 非时敏资源
相比可以实时调整到位的时敏资源,非时敏资源的调整周期较长,不能实现短时间内的大幅变化。典型的非时敏资源包括雷达节点的位置、节点的组织连接网络架构等。
目前,非时敏探测资源调度的研究工作主要围绕雷达系统运动平台的位置优化进行。例如,孟令同等人[88]提出了机载相控阵雷达飞行路径优化方案,对平台飞行路径进行联合动态优化。针对多雷达的监视搜索任务,Tang等人[89]提出了一种航迹规划方案,提升了雷达针对重点监视区域的目标检测性能。
若对机载平台飞行路径与时敏探测资源进行联合调度,则可进一步提升雷达系统探测性能。例如,Lu等人[90]提出了多目标跟踪场景下的机载雷达飞行路径和发射功率资源的联合优化设计算法,有效提升了机载雷达目标跟踪性能。严俊坤等人[91]考虑了复杂动态环境中的多机雷达协同航迹优化,用于提高动态区域的动态覆盖性能。除此之外,相关的研究还涉及了多无人机平台路径规划[92]、机载平台航向优化[93]、速度和姿态变化率优化[94]等。
除上述动平台雷达位置实时规划问题外,非时敏探测资源调度问题的另一个典型案例是地基雷达的拓扑布站方案优化。2017年武汉大学Yi等人[95]在同时考虑系统检测性能和定位精度的情况下,建立了D-MIMO雷达收发天线联合部署的组合优化模型。2021年西北工业大学Liang等人[96]针对分布式雷达在二维区域的定位问题,研究了部署区域受限情况下的最优节点部署方法。2022年电子科技大学Wang等人[97]在考虑了不同区域重要性的情况下,研究了基于检测性能和定位精度的雷达节点位置优化方案。同年,空军工程大学Qi等人[98]提出了一种联合天线部署和功率分配的策略,以提高D-MIMO雷达目标检测性能。
除了上述的雷达位置资源的优化,另外一种重要的非时敏资源要素是雷达节点的组织连接网络架构,但相关的研究工作还在起步阶段。2020年电子科技大学Yang等人[99]针对多雷达协同监视任务,提出了一种基于信号和信息的多层级融合架构的雷达融合中心及节点组织链接关系优化方案,可提高雷达对多个重要程度不同的区域的监视性能。
总的来说,现有的大量研究工作主要集中于时敏资源的调度。一方面,随着机载、舰载、无人机平台雷达系统的发展,近年来的一个重要趋势是将时敏资源和非时敏资源结合进行联合优化。另一方面,为了进一步挖掘资源调度的自由度,从而最大限度提升探测性能,当前另一个重要趋势就是将资源调度落到更低层级雷达参数的优化管控。例如,考虑波束形成过程对探测性能的影响,实现阵元级资源管理[51,52]。
4.2 不同跟踪信息融合架构下的资源调度算法进展
多雷达认知跟踪应用中,雷达节点间需完成必要的探测信息融合,以提升融合跟踪性能,所对应的融合架构也包含了前述的集中式和分布式融合两大类。
4.2.1 集中式架构
针对集中式融合架构下的认知跟踪资源调度问题,Hernandez等人[100]推导了传感器位置不确定和杂波影响下的集中式跟踪PCRLB,并提出了一种多传感器节点选择和优化部署方法。Chavali等人[77]通过限制同时刻工作的雷达节点数量,以降低集中式融合下雷达网络较高的通信代价,并提出了一种多雷达节点优化选择和功率分配方法。国内也针对集中式架构下的相控阵雷达、MIMO雷达提出了诸多认知跟踪资源调度算法,以提升目标跟踪精度[45,101]或者减少资源的消耗[49]。
上述工作主要考虑的是雷达门限检测后的信息融合方式,同时假设雷达节点的数据时间同步且雷达节点属性相同。2018年,电子科技大学Xie等人[56]进一步考虑了雷达节点直接传输基带回波的信号级融合架构,并完成了针对认知跟踪的资源调度。Yan等人[102]针对时间异步多雷达网络联合目标检测跟踪问题,提出了雷达目标检测门限和发射功率的联合优化分配方法。后续也陆续有工作将认知跟踪的资源调度工作推广到了各类异构、时间异步的集中式架构雷达网络中[103,104]。
4.2.2 分布式架构
围绕分布式融合架构下的认知跟踪及资源调度问题,肯高迪亚大学的Mohammadi等人[105]针对共识融合架构,推导了相应的分布式跟踪PCRLB,并在此基础上提出了一套分布式传感器节点选择方法[74]。同样针对共识融合架构,香港科技大学Chen等人[106]通过博弈论算法实现了传感器网络协同定位任务下的去中心化资源调度。Xie等人[80]针对分布式雷达网络,提出了基于去中心化粒子滤波融合架构的雷达资源调度算法。Lu等人[107]针对无中心化C-MIMO雷达网络,提出了一种资源调度问题的去中心化求解方案。针对分布式架构的组网CMIMO雷达系统,Yi等人[23]推导了基于协方差交叉融合准则的跟踪性能指标,提出了基于QoS准则的变尺度资源调度算法,可针对目标跟踪精度需求和探测任务重要性一体化分配多个C-MIMO雷达探测资源。Jiang等人[108]针对分层的分布式融合架构组网雷达,提出了考虑雷达节点选择代价和信息传输代价的网络架构优化问题。拉夫堡大学的Deligiannis等人[109]针对分布式MIMO雷达系统,利用博弈论方法实现了雷达节点的功率分配。
总体来说,目前认知跟踪资源调度研究围绕集中式融合架构的居多,因为集中式融合架构理论上可以获得最优的融合跟踪性能。另一方面,分布式融合架构可以不需要中心融合节点,且信息传输要求低,特别适合基于无线传输网络的无中心协同探测场景,如无人机群、战机编队协同探测,因此近年来的研究也逐渐增多。后续的一个研究趋势是将融合架构与雷达数据通信、传输过程相结合,考虑传输带宽受限等更贴近现实条件的融合跟踪场景[110—113]。例如,西安电子科技大学Zuo等人[113]考虑了数据传输过程中存在丢包问题的资源管理。
4.3 不同目标跟踪性能指标下的资源调度算法进展
准确构建一个能够表征或预测系统资源与目标跟踪性能之间映射关系的函数,是实现高效资源调度的前提条件。围绕目标跟踪性能指标建模需求,四川大学Shen等人[75]利用了卡尔曼滤波相关的信息增益矩阵实现了跟踪性能预测,并提出了一种大规模传感器网络的节点选择方法。Shi等人[30]利用互信息完成了发射功率资源的调度。但就目前的研究情况来看,绝大部分认知跟踪资源调度工作的性能指标还是基于PCRLB建立的。该指标作为序贯贝叶斯滤波问题中无偏估计器误差的理论统计下界,在大多数情况下可以较好地预测目标的跟踪误差,因此在目标跟踪的各类资源管理问题中被广泛应用[114,115]。
当前PCRLB相关研究工作的一大主要趋势是将其推广至更为复杂的应用场景中。针对杂波场景下的目标跟踪问题,Hernandez等人[100]推导了对应的基于信息衰减因子的PCRLB (IRF-PCRLB),并随后被应用到杂波场景下的资源调度问题中[116,117]。针对检测概率小于1的非理想检测场景,Farina等人[118]通过平均单站雷达的所有跟踪周期中可能的检测/漏检情况,推导了基于枚举的PCRLB。
此外,该研究领域的另一大趋势则是从数学原理出发,推导更为精确的PCRLB理论表达式。传统PCRLB计算中,量测信息不被直接使用,而是在状态估计值求均值的计算过程中间接使用,因而通常存在量测信息的计算损失,导致PCRLB不能精准逼近跟踪误差下界。对此,雪城大学Zuo等人[119]提出了一种条件PCRLB (C-PCRLB),通过对目标量测取条件平均,使部分量测信息在其计算过程中得以保留,随后其被应用到了认知跟踪资源调度问题中[120]。
上述研究主要围绕单雷达/单传感器目标跟踪问题展开,在此基础之上,多雷达/多传感器目标跟踪PCRLB及其认知跟踪资源调度也得到了广泛关注[26,110]。文献[100,101]率先给出了杂波场景下的集中式融合IRF-PCRLB,分布式融合的PCRLB表达式[34]也随之出现。针对非理想检测环境,电子科技大学Sun等人[121,122]推导了基于枚举的PCRLB,并实现了多站雷达资源的优化调度。文献[105,123]给出了分布式融合的C-PCRLB,随后将其应用到了多目标跟踪多雷达波束指向和功率调度问题中[74]。
目前,认知跟踪性能指标建模主要还是围绕PCRLB展开的,大多数研究工作致力于将PCRLB拓展至实际的跟踪场景中(如杂波场景、不完美检测场景)或从数学理论的角度出发,推导更为准确的表达式,以实现更加精确的跟踪性能预测/评估,从而提升其对应场景资源调度算法的性能。
4.4 不同优化准则下的资源调度算法进展
如3.2.5节所论述的,多雷达协同资源调度问题的本质就是建立一个以资源要素Θk为变量的数学优化问题,并通过数学计算获得最佳的资源要素Θk的分配方案。这里的优化目标函数f(·)的具体表达式需要根据调度准则和模型进行针对性的设计,以满足多元化的跟踪任务场景需求。
4.4.1 任务性能最优准则
(1) 单目标跟踪场景
(2) 多目标跟踪场景
与单目标跟踪不同,多目标跟踪任务中,任务间存在资源竞争关系,单个任务性能提升需消耗更多资源,雷达发射资源有限情况下,势必导致其他任务性能下降。因此,适用于多目标跟踪场景的目标函数设计过程更为复杂。
如图11所示,考虑雷达的监视区域中由近及远存在目标1,2,3,图中给出了3种不同的跟踪参数估计结果[79]。图11(a):对近、中区目标1,2具有更高参数估计精度,对远区目标3估计精度低;图11(b):对中、远区目标2,3具有更高参数估计精度,对近区目标1估计精度低;图11(c):3类目标有近似的参数估计精度,介于前两种结果中最好和最差的精度之间。
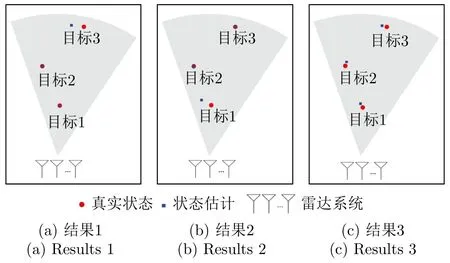
图11 3类可能的目标状态估计结果[126]Fig.11 Three possible results of target state estimation[126]
上述结果中,不同目标的估计误差各有好坏,难以绝对地界定这3类跟踪结果孰优孰劣。因此,多目标跟踪全局综合性能的评估以及对应目标函数的设计,目前仍旧是一个复杂的、开放性的问题。目前常采用的方法包括:
A) 加权求和准则:针对多目标跟踪场景下的优化目标函数设计问题,一种简单和直观的方式是最小化所有目标估计误差的加权和[127]:
B) MinMax准则:基于MinMax准则的全局目标函数旨在最小化多目标中跟踪性能最差目标的估计误差[40,45,80,116],对应目标函数可表示为
在基于MinMax的优化问题中,通过将发射资源优先分配给性能最差目标,最终的优化结果将使每个目标的误差都收敛到相对一致的水平。
总体来说,虽然加权求和准则或者MinMax准则可以提供一种多目标跟踪性能描述的方式,但是这两种准则还是存在很大的局限性。比如,对于MinMax准则来说,它的优化目的是让所有的被跟踪目标的跟踪误差趋于一致,但是这样就忽略了目标之间的差异,比如跟踪任务间不同的重要性、跟踪精度要求等。
(3) 基于QoS模型的全局目标函数
为了找到一个描述能力更强且适用于多目标跟踪任务的全局目标函数,文献[79]提出需要同时考虑以下两方面问题:
一是目标函数的设计应结合实际雷达系统的能力:例如,对于同一部雷达系统来说,角度分辨能力往往是固定的。那么即使在相同目标信噪比的条件下,远区目标的跟踪位置误差也会远远高于近区目标。此时,若采用MinMax准则进行资源优化,为了将所有目标的跟踪性能维持到同一水平,那么系统会将大部分资源用于跟踪远区目标,而近区的目标仅会分配很少资源,导致其跟踪精度无法得到保障。而实际情况往往是近区目标任务重要级别高,跟踪精度的要求也更高。
二是目标函数的设计应重点考虑多目标跟踪任务的全局性能以及目标任务的差异化:在实际的跟踪任务中,雷达会根据目标的类型、状态进行威胁度和重要性评估。目标函数的设计需要考虑到目标的差异化,而无需刻意将所有目标跟踪精度保持一致。比如,对于一个近区的高威胁目标,其跟踪精度要求应该远远高于一个远区的低威胁目标。
为满足由复杂应用场景带来的多元化任务需求,Yuan等人[79]提出了基于QoS模型的全局目标函数设计方案。在后续的研究中,基于QoS模型的全局目标函数逐渐被完善[20,60,128,129]。QoS模型的基本思想是通过不同的任务效用函数来描述多个差异化的目标,其对应数学表达式如下:
其中,重要性权值ϖq、质量函数Mq(·)、效用函数ϕq(·)分别用于表征单个跟踪任务q在所有任务中所占权重、预期性能水平、特定任务性能下的整体任务效用。QoS模型的这3项参数提高了全局目标函数自由度和描述能力,可根据不同任务和优化准则进行针对性设计。
针对性能最优跟踪准则,文献[23]给出了一种基于指数效用函数的全局目标函数设计方案,实现了波束指向和发射功率的联合优化,优化问题如下:
图12给出了文献[23]的目标跟踪场景:3部雷达协同跟踪4个目标,按照与网络化MIMO雷达的距离,探测区域由近及远被分为3部分,各区域对应的期望跟踪精度越近越高。基于上述场景,图13给出了MinMax和QoS模型不同重要性权值ϖq和跟踪性能要求下的跟踪结果对比,其中RMSE-Targeti和BCRLB Targeti分别表示目标i状态估计的均方根误差和PCRLB。横坐标k表示第k个跟踪时刻,Threshold为对应的跟踪性能要求,QoS模型中不同的仿真参数设置情况见表1。可以发现QoS模型可实现跟踪精度的差异化调整,以满足复杂场景下的多元化任务需求。图14给出了图13的4个场景对应资源调度结果,包括雷达波束指向及发射功率分配结果随时间变化情况。可以看出,QoS模型动态控制目标跟踪性能的实质就是通过赋予各目标不同的重要性权值ϖq、任务性能要求等参数,实现不同的雷达的发射功率和波束指向资源配置,从而输出了差异化的多目标跟踪结果。
表1 文献[23]中QoS模型3种不同参数设置Tab.1 The 3 different parameters setting for the QoS model in Ref.[23]
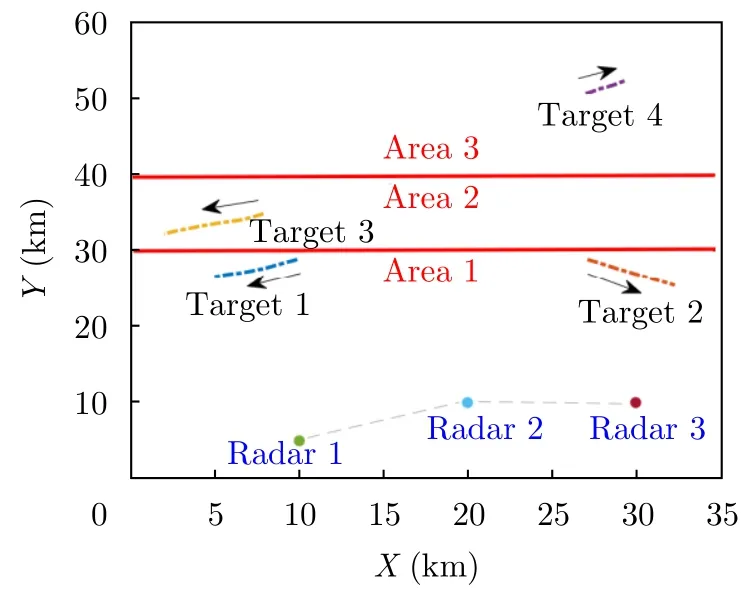
图12 网络化MIMO雷达多目标跟踪场景[23]Fig.12 Multi-target tracking scenario using netter MIMO radar[23]

图13 MinMax和QoS模型下多目标跟踪性能对比[23]Fig.13 Multi-target tracking performance comparison between MinMax and QoS models[23]
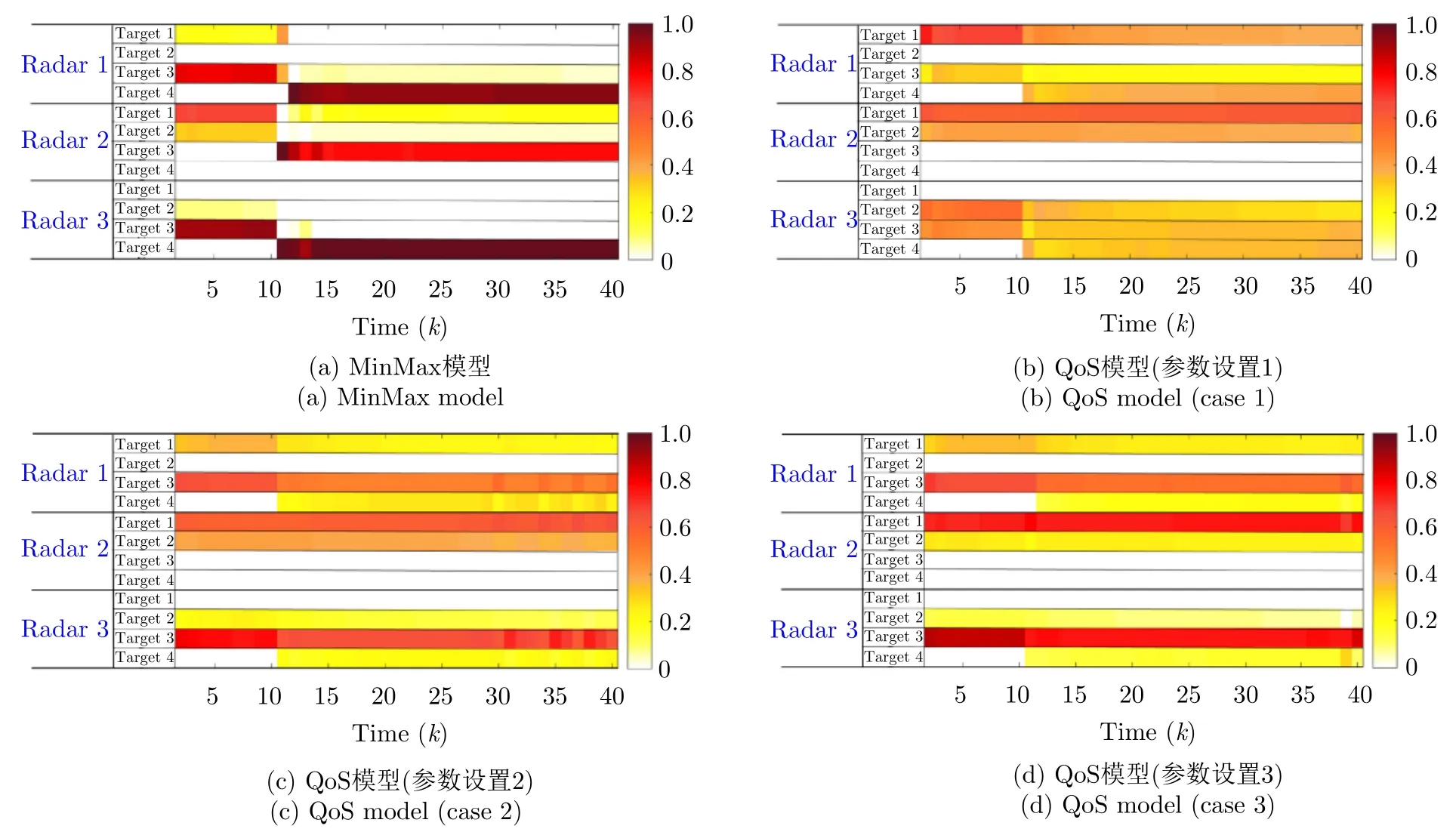
图14 MinMax和QoS模型下资源分配结果对比(归一化发射功率)[23]Fig.14 Resource allocation comparison between MinMax and QoS models (normalized transmit power)[23]
(4) 基于多任务指标的多目标优化
上述工作都是基于单个任务指标类型构建的单目标优化问题。除此之外,通过将认知跟踪性能指标与其他探测任务指标结合,或者从不同维度构建多个跟踪性能指标,资源调度优化问题可被构建成一个多目标优化问题。例如,针对雷达监视和定位任务下的雷达构型优化,可以建立一个同时最大化检测覆盖率和定位精度的多目标优化问题,利用帕累托最优的思想找到非支配的雷达构型解集[97]。类似的思想也用在了相控阵雷达搜索加跟踪(Trackand-Search,TAS)模式下的搜索和跟踪任务性能联合优化[38]。此外,Cheng等人[48]提出了一种同时最小化跟踪误差和雷达功率消耗的双目标优化问题,通过对跟踪误差和功率消耗加权求和,将该问题降维成一个单目标问题。
4.4.2 系统资源最小化准则
和之前4.4.1节性能最优准则不同,系统资源最小化准则的目的是在满足一定的任务性能指标的情况下,最小化系统资源的使用率。
(1) 直接资源最小化
例如,一种常用的资源最小化跟踪准则数学优化问题是在满足目标跟踪预设性能约束下,直接最小化雷达的总发射资源,本文将其称为直接资源最小化模型。参考式(12),直接资源最小化对应的优化问题可写为
直接资源最小化的目标函数为关于雷达资源的凸组合,其结构简单,当约束条件为凸函数时,可以通过凸优化算法找到其最优解[130]。基于直接资源最小化的多雷达资源调度工作也在近几年得到了广泛的关注,包括目标定位任务下的雷达功率分配[131]、目标跟踪任务下的雷达驻留时间[125]、功率和波束指向分配[132],以及无线传感器的频谱共享等问题[133]。
直接资源最小化可减少雷达系统资源消耗,实现诸如最优的LPI任务效能,或延长自供电探测系统(如以电池供电的无线传感器网络)的工作寿命。但是该准则也存在一个数学求解缺陷:当雷达探测资源预算不足时,直接资源最小化可能会出现因不满足性能期望约束而无法找到可行解的问题。
(2) 基于QoS模型的全局目标函数
为克服直接资源最小化存在的数学求解缺陷,文献[33]提出了一种基于QoS模型的全局目标函数设计方案。该方案中,严格的性能约束条件被转化为优化目标中效用函数值的变化,从而避免了直接资源最小化由于约束条件不满足而出现无可行解的缺陷,对应优化问题如下:
其中,
如图15所示,当资源充足时,基于QoS模型的全局目标函数与直接资源最小化模型的情况能够达到一样的任务效能(即达到任务精度要求,消耗最少的发射资源)。当资源不足时,QoS模型可根据不同的任务重要性权值和跟踪精度要求,给出差异化的资源调度方案,从而避免无可行解的情况。

图15 直接资源最小化和QoS模型下多目标跟踪性能对比[33]Fig.15 Multi-target tracking performance comparison between Direct resoure minimization and QoS models[33]
基于QoS模型的全局目标函数设计除了可以考虑目标跟踪精度,还可以跟踪任务需求考虑其他性能指标。例如,Yan等人[134]还提出基于目标容量的目标函数设计,旨在最大化达到预设跟踪精度的目标数量。电子科技大学Xiong等人[135]利用网络通信代价和跟踪精度的加权和定义了QoS模型的目标函数,实现了多目标跟踪任务在多雷达间的优化分配。
同时,QoS模型也不局限于目标跟踪问题,针对雷达采样率优化问题,Havelsan公司的Irci等人[128]设计了一套基于指数效用函数的雷达探测性能经验指标模型,构建并求解了关于相控阵雷达采样率优化的数学问题。针对更为广义的雷达探测任务下的资源分配问题,德国Fraunhofer FKIE公司的Charlish等人[129]总结了QoS模型的全局目标函数设计的一般方案,并且对QoS框架在认知雷达资源调度领域的应用情况进行了系统性的总结。
总的来说,性能最优、资源最小化囊括了当前大多数认知跟踪资源调度研究所使用的优化准则。性能最优准则可以在有限资源下实现高的探测性能,满足协同探测系统的探测威力拓展、目标跟踪性能提升等需求。资源最小化准则在系统资源消耗、LPI性能等方面具备优势。总而言之,不同的优化准则拥有其特定的优势应用场景,优化准则的选取应当充分考虑具体的任务场景需求。
4.5 复杂任务场景下的资源调度算法进展
随着新型探测目标的出现以及探测电磁环境的日益复杂,跟踪目标的运动状态、雷达执行任务的环境特征呈现出复杂多变的态势。因此,考虑包括低空、机动目标、群目标跟踪,以及电子侦察、干扰环境等复杂任务场景下的目标跟踪资源调度成为本领域研究的前沿和难点问题。
4.5.1 复杂目标运动模型
当前,大多数认知跟踪资源调度工作对任务场景进行了简化。一方面,现有工作通常假设目标服从匀速、匀加速等规则运动模型,未考虑机动性、低空目标的地、海杂波等因素对资源调度算法的影响。另一方面,在多目标跟踪中,现有资源调度工作通常假设目标与目标间在空间上相隔较远,以简化跟踪数据处理。这些假设将使资源调度算法在实际应用场景中的性能受到制约。
为应对上述缺陷,目前一部分认知跟踪资源调度工作也开始从目标运动复杂性角度入手,开展机动目标[136—138]、低空目标[139]、群目标[140,141]等场景下的认知跟踪资源调度问题研究。此类资源调度问题大多先针对复杂的运动场景设计适配的信号处理方法,然后推导对应的性能指标作为资源调度问题的输入,最终实现雷达资源的优化。以机动目标跟踪为例,2020年,枣庄学院Han等人[136]在保证状态向量在不同模型下具有相同的均值和协方差前提下,提出了最优拟合高斯方法,用于在每个跟踪时刻替换IMM运动模型的先验目标PDF,并在此基础上推导了跟踪性能指标,完成了采样时间和功率资源的联合优化。空军工程大学Zhang等人[137]还针对机动目标、低空目标[142]跟踪,采取了类似的思路实现了雷达资源的优化。
4.5.2 LPI条件下的认知跟踪
该方向旨在设计同时保证系统LPI性能与跟踪性能的资源调度算法。2020年,Shi等人[39]提出了一种相控阵雷达网络多目标跟踪中的目标指派和资源联合分配算法,在资源调度过程中,同时考虑了多目标跟踪性能与系统LPI性能。在此基础上,进一步提出了一种基于LPI的雷达功率、驻留时间、带宽、脉冲长度多参数联合分配算法,以实现跟踪性能最大化或系统资源消耗最小化[86]。除了上述地基相控阵雷达相关研究外,后续还有工作针对机载组网雷达资源调度开展研究,在满足跟踪性能基础上降低机载网络的截获概率[143]。也有文献[144—146]考虑了在MIMO雷达体制下的低截获性能优化研究。此外,还有工作基于雷达通信一体化系统,研究了同时满足雷达探测性能与通信性能的一体化系统功率分配方案[147]。
LPI性能是现代雷达系统的重要指标之一,研究基于LPI的认知跟踪资源调度具有重要应用价值。但总的来说LPI条件下的认知跟踪资源调度研究还并不成熟。例如,组网探测系统的LPI系统模型、性能评价指标建模等工作尚未完善。
4.5.3 干扰环境下的认知跟踪
伴随新型电子侦察、识别和干扰手段的发展,在被截获、干扰等场景下完成目标探测,逐渐成为多雷达协同需要具备的基本功能。因此,认知跟踪资源调度问题的研究也需要考虑各类电磁干扰场景。
有源电子干扰可根据其对雷达造成的干扰效果大致划分为压制干扰和欺骗干扰两大类。从1996年开始,美国乔治亚理工大学Kirubarajan等人[41,42]就开展了具有均匀照射能力的相控阵雷达的资源调度问题研究,用于在存在虚警和有源压制干扰的情况下跟踪机动目标。针对欺骗干扰下的雷达资源调度,2005年,国防科技大学周颖等人[148]定义了多假目标干扰效果的3项指标,在此基础上提出了相控阵雷达抗干扰的任务调度和资源管理优化方法。2019年,南京航空航天大学Tao等人[149]提出了一种相控阵雷达多目标跟踪的最优时间分配算法,在有源压制干扰下提高目标跟踪性能及跟踪容量。除相控阵雷达外,Zhang等人[150,151]还考虑了压制干扰下的MIMO体制雷达波束-功率联合分配问题,以及欺骗干扰下分布式MIMO雷达站点选择和功率分配问题。
上述工作都是基于雷达方的单边资源优化。目前,雷达-干扰机的双边博弈也逐渐成为对抗环境下的雷达资源调度问题研究的关键点[152]。随着智能算法的兴起,越来越多的学者开始考虑采用智能算法解决对抗环境下的雷达资源调度问题。2012年,美国康涅狄格大学Song等人[153]将MIMO雷达与干扰机之间的互信息函数作为零和博弈分析的效用函数,构造了一种功率分配优化模型。2022年,中国人民解放军陆军工程大学Zhang等人[154]针对反跟踪干扰问题,提出了一种基于双模Q学习的多用户抗干扰通信信道和功率联合优化方案。2022年,电子科大学Ailiya等人[155]提出了一种基于强化学习的雷达跳频抗干扰策略,可以平衡雷达的积累性能与LPI性能。
与前述两类复杂场景下的资源调度问题相似,干扰环境下的认知跟踪资源调度在近几年受到了广泛关注,但目前仍存在很多待解决的问题。此外,利用智能算法解决雷达资源感知对抗博弈问题也逐渐开始成为一种趋势。
5 研究趋势与展望
总体而言,多雷达协同探测技术的本质是从探测构型、信号维度、系统自由度等方向,由低维度向高维度演进,符合雷达技术发展的趋势和规律,所以也成为近年来雷达技术领域的热点方向之一。而一体化的系统资源调度方法是实现雷达深度协同的机制保障和核心技术。为此,本文梳理了近年来认知跟踪与资源调度方向的最新研究进展,旨在为后续研究提供参考。
从论文前4节可以看出,由于该技术立足于多部雷达的交互和联动,涉及的信号与信息维度、系统自由度将显著高于单雷达相关技术。因此,该技术往往还伴随着网络架构与通信传输、信息融合理论、优化问题建模与求解、机器学习与人工智能等基础理论方法的进步而发展。另一方面,该技术也需要紧扣各类实际任务需求,结合最新的指挥控制理论体系,对雷达系统面临的各类新型探测目标、军民电磁干扰信号开展研究。最后,就目前公开的资料来看,该方向的研究主要还集中在理论算法研究,虽然算法的性能得益已通过仿真模型得到验证,但是工程可用性以及在实际环境中的性能得益还有待验证。
总体来说,从技术发展和应用需求角度,该技术具有以下几个发展趋势:
(1) 多样化的多雷达通信传输与雷达组网架构:当前大部分认知跟踪资源调度工作都聚焦于集中式通信传输架构和相同体制的雷达协同。针对去中心化网络架构、异质异步雷达节点,甚至雷达与异类传感器协同组网的研究还具备较大发展潜力。
(2) 高维度混合层级的信号与信息综合处理方式:当前主要以雷达点迹级信息(量测、似然函数、后验概率密度函数等)融合为主,而多雷达协同的发展方向之一是结合信号处理与信息融合理论的发展,研究航迹级、点迹级、信号级等多层级信息混合处理方法。同时,相应的认知跟踪资源调度方法也需要有对应延伸。
(3) 考虑多样化目标对象、复杂地理与电磁环境:雷达面临的探测环境日益复杂,各类新型探测目标、军用民用电子干扰不断的涌现,对雷达探测/生存能力带来挑战。因此,认知跟踪与资源调度方法的研究也需要紧跟探测目标与探测环境的变化。
(4) 多任务冲突条件下的全局最优调度方法:目前的资源调度方法研究主要还聚焦于目标跟踪任务,而在实际的应用中,雷达系统需要执行搜索、跟踪、识别、LPI、抗干扰、通信等多种任务,且各任务的执行存在资源冲突。未来的研究可围绕态势支持、目标指示、毁伤评估、指挥引导4大任务场景,开展更为多样化的协同探测资源调度研究。
(5) 数学建模和人工智能相结合的协同调度:传统资源调度问题旨在建立并求解解析优化模型,而解析模型越来越难以描述复杂场景下雷达的综合性能。随着强化学习、深度神经网络为代表的智能优化算法的快速发展,将人工智能方法与雷达信号与信息处理、雷达系统的资源一体化调度相结合也是一个重要的发展趋势。
(6) 与最新的指挥控制理论体系相结合:多雷达协同探测闭环从广义上看,需要综合考虑探测环境、装备条件、情报信息、指挥员决策、人机智能交互等多因素。而本文聚焦的资源调度与认知跟踪方法仅仅属于其中的信号处理算法小闭环。因此,后续该方向的研究需要结合指挥控制理论体系的发展,并紧跟协同探测大闭环理论的发展。
(7) 围绕典型的多雷达协同探测系统进行样机研制与试验验证:目前的认知跟踪资源调度研究主要以地基雷达为导向。未来可针对舰载编队、战机编队、蜂群雷达、星基协同等典型的探测系统,完成相关技术的系统应用研究,并开展样机研制与试验验证工作。